Вимірювач радіальної швидкості для радіолокатора наведення безупинного випромінювання
Номер патенту: 40136
Опубліковано: 16.07.2001
Автори: Порошин Сергій Михайлович, Бахвалов Валентин Борисович


Формула / Реферат
Вимірювач радіальної швидкості для радіолокатора наведення безупинного випромінювання, що містить передавач безупинного сигналу з дзеркальною антеною, що передає, приймач із приймальнею антеною, амплітудним детектором і фільтром низьких частот і вимірювач частоти Доплера, що відрізняється тим, що приймальна антена виконана у вигляді круглої кільцевої щілини на параболічному дзеркалі антени, що передає, і пов'язана коаксіальним рупором і коаксіальними кабелями з приймачем луна-сигналів цілі і ракети і з приймачем сигналу бортового передавача ракети, до складу устрою додатково включений генератор, частота якого дорівнює частоті сигналу бортового передавача ракети, цей генератор пов'язаний із приймачем сигналу бортового передавача ракети, а на виході цього приймача встановлений амплітудний детектор із фільтром низьких частот, пов'язаним із вимірювачем частоти Доплера ракети Fдр2, вимірювачі частот Доплера пов'язані з обчислювачем радіальних швидкостей цілі і ракети, що наводиться на її, по співвідношеннях
![]() ,
,
![]() ,
,
![]()
де Vp - радіальна швидкість ракети,
V - радіальна швидкість цілі,
λ - довжина хвилі радіолокатора,
λρ - довжина хвилі бортового передавача ракети,
F - доплерівська частота па виході каналу прийому лупа-сигналів цілі і ракети,
FДР2 - доплерівська частота на виході каналу прийому сигналу бортового передавача ракети.
Текст
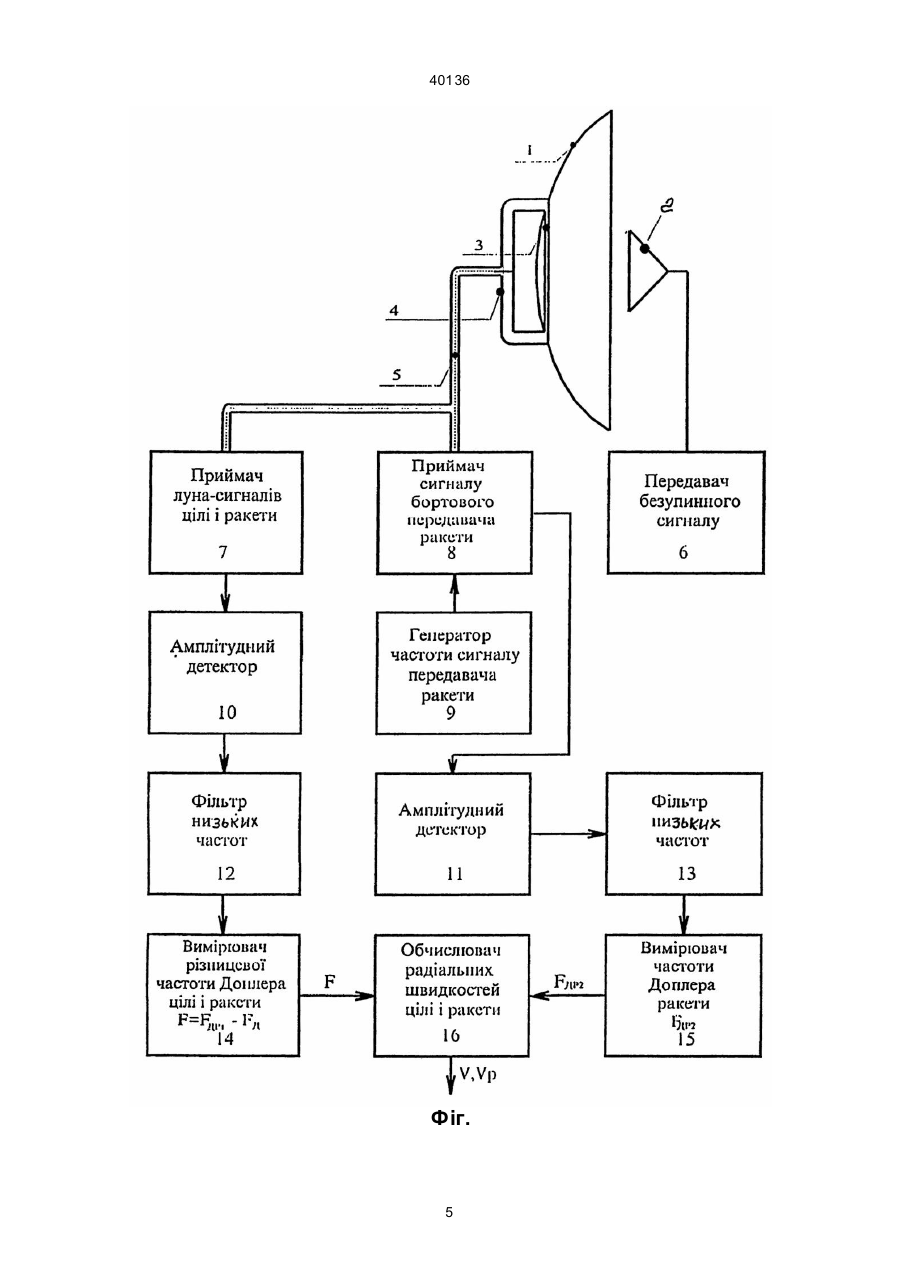
Вимірювач радіальної швидкості для радіолокатора наведення безупинного випромінювання, що містить передавач безупинного сигналу з дзеркальною антеною, що передає, приймач із приймальною антеною, амплітудним детектором і фільтром низьких частот і вимірювач частоти Доплера, який відрізняється тим, що приймальна антена виконана у вигляді круглої кільцевої щілини на параболічному дзеркалі антени, що передає, і пов'язана коаксіальним рупором і коаксіальними кабелями з приймачем луна-сигналів цілі і ракети і з приймачем сигналу бортового передавача ракети, до складу пристрою додатково включений генератор, частота якого дорівнює частоті сигналу бор тового передавача ракети, цей генератор пов'язаний із приймачем сигналу бортового передавача ракети, а на виході цього приймача встановлений амплітудний детектор із фільтром низьких частот, пов'язаним із вимірювачем частоти Доплера ракети FДР2 , вимірювач частот Доплера пов'язаний з обчислювачем радіальних швидкостей цілі і ракети, що наводиться на неї, по співвідношеннях Винахід належить до області радіолокації і може бути використаний в наземних радіолокаторах наведення безупинного випромінювання мікрохвильового діапазону для виміру радіальних швидкостей цілі і ракети, що наводиться на неї. Відомий радіолокаційний вимірювач радіальної швидкості цілі за частотою Доплера [1, с.104, фіг. 3.6], у якому для поділу доплерівських частот цілей використаний набір вузькосмугових доплерівських фільтрів. Радіальну швидкість цілі визначають за частотою Доплера за допомогою відомого співвідношення, а частоту Доплера визначають за резонансною частотою того фільтра, на виході якого з'явиться сигнал цілі. Хибою такого аналогу є те, що для поділу доплерівських частот двох або більше цілей (наприклад, цілі і ракети, що наводиться на неї) використовують великий набір вузькосмугових доплерівських фільтрів і декілька індикаторів на виході кожного фільтра, тобто конструкція приймальної системи радіолокатора складна і її важко реалізувати. Крім того, виникають проблеми з інтерпретацією результатів вимірів, тому що, крім доплерівських частот цілей, з'являються також сумарні (або різницеві) доплерівські частоти і їх важко зіставити з конкретними цілями. Інша хиба аналогу полягає в тому, що при обмеженій (прийнятному для реалізації) кількості доплерівських фільтрів точність виміру радіальної швидкості буде низькою, і доплерівські частоти цілі і ракети можуть опинитися в одному фільтрі. Як прототип обраний доплерівський радіолокатор безупинного випромінювання [1]. Прототип містить антену, що передає (вона ж є також приймальною антеною), передавач безупинних коливань високої частоти f0, приймач з амплітудним детектором, підсилювач доплерівської частоти й індикатор (наприклад, у вигляді вимірювача частоти Доплера). Підсилювач доплерівської частоти містить фільтр нижніх частот, що виділяє доплерівськi частоти, але придушує високі частоти. Як антену прототипу, що передає, можна використовувати, наприклад, дзеркальну антену з параболічного металевого дзеркала й випромінювача. Ра Vр = FДР 2l p , V = l pFДР 2 - l F / 2 , (19) UA (11) 40136 (13) A де: Vр - радіальна швидкість ракети; V - радіальна швидкість цілі; l - довжина хвилі радіолокатора; lр - довжина хвилі бортового передавача ракети; F - доплерівська частота на виході каналу прийому луна-сигналів цілі і ракети; FДР2 - доплерівська частота на виході каналу прийому сигналу бортового передавача ракети. 40136 діальну швидкість цілі V у прототипі визначають за обмірюваною частотою Доплера за допомогою відомого співвідношення V = lFД / 2 , l - довжина хвилі радіолокатора; l R - довжина хвилі бортового передавача ракети; F - доплерівська частота на виході каналу прийому луна-сигналів цілі і ракети; FДР2 - доплерівська частота на виході каналу прийому сигналу бортового передавача ракети. Використання як приймальної антени кругової кільцевої щілини, вирізаної на параболічному дзеркалі антени, що передає, забезпечує розв'язку каналів прийому і передачі, тому що така антена не приймає прямі сигнали випромінювача антени, що передає. При цьому в каналі прийому лунасигналів будуть тільки сигнали цілі і ракети, що наводиться на неї, і не буде прямого сигналу передавача. У результаті на виході цього каналу буде тільки одна доплерівська частота (сумарна або різницева) і проблем із поділом доплерівських частот і їхнього виміру не виникає. Радіальну швидкість ракети визначають по сигналу бортового передавача ракети, що звичайно завжди є на борту ракети в зенітно-ракетних комплексах активного наведення. Цей сигнал приймають тією ж щілинною антеною, але іншим приймачем. Після визначення радіальної швидкості ракети визначають радіальну швидкість цілі за результатом виміру єдиної доплерівської частоти в каналі прийому луна-сигналів цілі і ракети. Запропонований пристрій забезпечує вимір радіальних швидкостей цілі і ракети, що наводиться на неї, в радіолокаторі безупинного випромінювання при відсутності кутового дозволу між ними. При цьому проблем із поділом і виміром доплерівських частот не виникає. Технічна сутність і принцип дії запропонованого пристрою пояснює креслення (фіг.), де надано спрощену структурну схему запропонованого вимірювача радіальної швидкості для радіолокатора наведення безупинного випромінювання і показаний спрощений ескіз його антенної системи. До складу запропонованого пристрою на схемі входять такі основні елементи: - параболічне дзеркало антени 1; - випромінювач 2 дзеркальної антени, що передає (наприклад, рупорний випромінювач); - приймальна щілинна кільцева антена 3 у вигляді круглої щілини, вирізаної на параболічному дзеркалі антени, що передає; - коаксіальний рупор щілинної антени 4, пов'язаний із приймальною щілинною антеною (у цьому рупорі збуджується хвиля типу ТЕМ); - коаксіальний кабель 5, що зв'язує коаксіальний рупор 4 із приймачами луна-сигналів і сигналів бортового передавача ракети; - передавач 6 безупинного сигналу; - приймач 7 луна-сигналів цілі і ракети, що наводиться на неї; - приймач 8 сигналу бортового передавача ракети (цей сигнал також приймається щілинною антеною 3, але його частота відрізняється від робочої частоти радіолокатора); - генератор 9, частота якого дорівнює частоті сигналу бортового передавача ракети; - амплітудний детектор 10 приймача лунасигналів 7; - амплітудний детектор 11 приймача 8 сигналу бортового передавача ракети; (1) де: l - довжина хвилі; FД - частота Доплера. Частоту Доплера цілі виділяють на виході детектора приймача, що приймає одночасно як лунасигнали рухомої цілі, так і прямий безупинний сигнал передавача, що зондує. Хибою прототипу є те, що такий радіолокатор не має дозвіл за радіальною швидкістю і не може одночасно вимірювати радіальні швидкості декількох цілей (наприклад, цілі і ракети, що наводиться на неї, при відсутності кутового дозволу між ними). При наявності декількох цілей на виході амплітудного детектора приймача, крім доплерівських частот цілей, будуть також сумарні і різницеві доплерівські частоти. Розділити ці доплерівські частоти, виміряти і зіставити з конкретними цілями найчастіше не вдасться. В основу винаходу поставлена задача вдосконалення вимірювача радіальної швидкості для радіолокатора наведення безупинного випромінювання, у якому, за рахунок використання для прийому сигналів щілинної кільцевої антени, вирізаної на параболічному дзеркалі антени, що передає, і виміру радіальної швидкості ракети за сигналом її бортового передавача, забезпечують вимір радіальних швидкостей цілі і ракети, що наводиться на неї, при відсутності кутового дозволу між ними, й усувають проблеми з поділом і виміром доплерівських частот на виході приймача луна-сигналів. Поставлена задача вирішується тим, що у вимірювачі радіальної швидкості для радіолокатора наведення безупинного випромінювання, що містить передавач безупинного сигналу з дзеркальною антеною, що передає, приймач із приймальною антеною, амплітудним детектором із фільтром нижніх частот і вимірювач частоти Доплера, відповідно до винаходу: - приймальна антена виконана у вигляді круглої кільцевої щілини на параболічному дзеркалі антени, що передає, і пов'язана коаксіальним рупором і коаксіальними кабелями з приймачем луна-сигналів цілі і ракети і з приймачем сигналу бортового передавача ракети; - до складу устрою додатково включений генератор, частота якого дорівнює частоті сигналу бортового передавача ракети; - цей генератор пов'язаний із приймачем сигналу бортового передавача ракети, а на виході цього приймача встановлений амплітудний детектор із фільтром низьких частот, пов'язаним із вимірювачем частоти Доплера ракети FДР2; - вимірювачі частот Доплера пов'язані з обчислювачем радіальних швидкостей цілі і ракети, що наводиться на неї, по співвідношеннях: Vр = FДР 2l p , V = l pFДР 2 - l F / 2 , (2) (3) де: Vр - радіальна швидкість ракети; V - радіальна швидкість цілі; 2 40136 - фільтри низьких частот 12,13 на виходах амплітудних де текторів приймачів; - вимірювач 14 різницевої частоти Доплера луна-сигналів цілі і ракети F=FДР1-FД; - вимірювач 15 частити Доплера FДР2 сигналу бортового передавача ракети; - обчислювач 16 радіальних швидкостей цілі ракети V i ракети VP по обмірюваних частотах Доплера F, FДР2 за допомогою співвідношень (2), (3). Принцип дії запропонованого устрою пояснюють таким. Для прийому сигналів пропонується використовувати кільцеву щілинну антену 3, вирізану на металевому параболічному дзеркалі дзеркальної антени, що передає. Ця щілинна антена пов'язана з коаксіальним рупором 4, у якому збуджується хвиля тип у ТЕМ. Така антена не приймає прямі сигнали випромінювача антени, що передає, і сигнали з напрямку осі дзеркала, але приймає луна-сигнали цілі і ракети з інших напрямків. Це забезпечує розв'язку каналів прийому і передачі. Крім того, ця ж щілинна антена приймає також сигнал бортового передавача ракети на іншій несучій частоті. У приймачі 7 луна-сигнали цілі і ракети посилюються і детектуються амплітудним детектором 10. Прямого сигналу передавача 6 у цьому каналі прийому не буде. В результаті на виході амплітудного детектора 10 буде тільки одна доплерівська частота F, яка дорівнює різниці F = FДР1 - FД Vр визначають по цій доплерівській частоті FДР2 за допомогою відомого співвідношення (2). Після цього радіальну швидкість цілі V визначають по різницевій (або сумарній) доплерівській частоті F за допомогою співвідношення (3), що отримане зі співвідношень (1), (2), (4). Приймальна щілинна антена 3 запропонованої конструкції з коаксіальним рупором 4 і коаксиальним кабелем 5 потрібна для розв'язки каналів прийому і передачі. Ця ж антена служить для прийому сигналу бортового передавача ракети. Приймач 7 потрібний для прийому луна-сигналів цілі і ракети, а приймач 8 - для прийому сигналу бортового передавача ракети. Генератор 9 необхідний для виділення доплерівської частоти з прийнятого сигналу бортового передавача ракети. Амплітудні детектори 10, 11 і фільтри нижніх частот 12, 13 потрібні для виділення відповідних доплерівських частот F, FДР2 Розділяти доплерівські частоти на вихода х каналів прийому не потрібно, тому що на кожному виході буде тільки по одній доплерівській частоті. Це істотно спрощує процес виділення і виміри доплерівських часто т і підвищує точність вимірів. Таким чином, запропонований пристрій може бути практично реалізований, а відзначені вище відмітні ознаки є істотними і принципово необхідні для реалізації пристрою. Основні елементи запропонованого пристрою на схемі (фіг.) виконані в такий спосіб. Антена, що передає, виконана у вигляді металевого параболічного дзеркала 1 і рупорного випромінювача 2. Передавач 6 виконаний у вигляді генератора безупинного синусоїдального сигналу і пов'язаний з випромінювачем 2. Щілинна приймальна антена 3 виконана у вигляді круглої кільцевої щілини, вирізаної на параболічному дзеркалі антени, що передає. Ширина щілини менше половини довжини хвиль. Коаксіальний рупор 4 пов'язаний із щілиною 3 і в ньому збуджується хвиля типу ТЕМ. Довжина цього рупора не має принципового значення і обирається з конструктивних розумінь. Цей рупор 4 пов'язаний коаксіальним кабелем 5 з приймачами 7, 8. Приймач 7 настроєний на частоту радіолокатора, а приймач 8 - на частоту бортового передавача ракети. Ці приймачі можуть бути виконані або у вигляді приймачів прямого посилення, або у вигляді супергетеродинних приймачів, кожний із своїм гетеродином і своєю проміжною частотою. Генератор 9 подає малопотужний генератор синусоїдальних коливань, частота якого дорівнює частоті бортового передавача ракети. Сигнал цього генератора вводиться в тракт прийому приймача 8. Амплітудні детектори 10, 11 можуть бути виконані у вигляді діодів з квадратичною вольтамперної характеристикою. Фільтри нижніх частот 12, 13 мають порівняно широку смугу пропускання, що о хоплює весь можливий діапазон доплерівських частот. Вимірювачі доплерівських частот 14, 15 мають відому конструкцію. Обчислювач 16 подає мікроЕОМ для розрахунку радіальних швидкостей цілі і ракети по доплерівських частотах F, F ДР2 за допомогою співвідношень (2), (3). Динаміка роботи запропонованого пристрою здійснюється в такий спосіб. У процесі наведення ракети на ціль бортовий передавач ракети випромінює сигнал на своїй робочій частоті і цьому сиг (4) доплерівських частот ракети і цілі при стрілянині навздогін або сумі цих доплерівських частот при наведенні на зустрічних курсах. Ця доплерівська частота F виділяється фільтром нижніх частот 12 і вимірюється вимірювачем 14. Цей же фільтр придушує високочастотні складові на виході амплітудного детектора 10 і має порівняно широку смугу, що о хоплює весь можливий діапазон доплерівських частот. Проблем із поділом і виміром доплерівських частот на виході амплітудного детектора 10 не виникає, тому що тут присутня тільки одна різницева (або сумарна) доплерівська частота F, що можна легко виміряти вимірювачем 14. Проте по цій доплерівській частоті F можна судити лише про швидкість зближення цілі і ракети, але не можна визначити радіальні швидкості цілі і ракети. Для визначення радіальних швидкостей цілі і ракети пропонується спочатку вимірювати радіальну швидкість ракети за сигналом її бортового передавача. Такий передавач, звичайно, завжди є на борту ракети в системах активного наведення, а несуча частота його відрізняється від частоти радіолокатора. Для цього сигнал бортового передавача ракети приймають за допомогою щілинної антени 3 і приймача 8. Для одержання доплерівської частоти FДР2 сигналу бортового передавача ракети на виході приймача 8 у цей канал прийому вводять також допоміжну частоту генератора 9, що дорівнює частоті бортового передавача ракети, а доплерівську частоту FДР2 виділяють на виході цього приймача за допомогою амплітудного детектора 11 і фільтра нижніх частот 13. На виході амплітудного детектора 11 буде тільки одна доплерівська частота FДР2, що вимірюють вимірювачем 15, а проблем із поділом і виміром доплерівських частот тут також не виникає. Радіальну швидкість ракети 3 40136 нал приймається щілинною антеною 3 і приймачем 8. У цей канал прийому вводиться також сигнал генератора 9, а на виході каналу виділяється доплерівська чистота FДР2 за допомогою амплітудного детектора 11 і фільтра нижніх частот 13. Цю частоту вимірює вимірювач 15. Передавач 6 формує, а дзеркальна антена, що передає, випромінює безупинний синусоїдальний сигнал на своїй робочій частоті. Приймальна щілинна антена 3 і приймач 7 приймають луна-сигнали цілі і ракети, що наводиться на неї. Припускається, що цілі і ракета не вирішуються по кутови х координатах, і їхні лунасигнали приймаються одночасно. Сигнал передавача 6 у тракт прийому приймача 7 не потрапляє, тому що щілинна антена 3 не приймає сигнали з напрямку осі дзеркала, але приймає сигнали з інших напрямків. На виході приймача 7 виділяють різницеву доплерівську частоту F луна-сигналів ці лі і ракети за допомогою амплітудного детектора 10 і фільтра нижніх частот 12. Цю частоту вимірює вимірювач 14. Обчислювач 16 обчислює радіальні швидкості цілі і ракети V, VР по обмірюваних доплерівських частотах F, FДР2 за допомогою співвідношень (2), (3). Таким чином, запропонований пристрій вирішує поставлену задачу, усуває відзначені хиби аналогу і прототипу і забезпечує вимір радіальних швидкостей цілі і ракети, що наводиться на неї, в радіолокаторі безупинного випромінювання при відсутності кутового дозволу між ними. Джерела інформації: 1. Сколник М. Введение в технику радиолокационных систем / Пер. с англ. под ред. К.Н.Трофимова. - М.: Мир, 1965. - С. 94, 95, фиг. 3.2 (прототип). 4 40136 Фіг. 5 40136 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 6
ДивитисяДодаткова інформація
Назва патенту англійськоюDetector of radial range rate for radar of an analogue irradiation guiding
Автори англійськоюPoroshyn Serhiy Mykhailovych, Bakhvalov Valentyn Borysovych
Назва патенту російськоюИзмеритель радиальной скорости для радиолокатора наведения непрерывного излучения
Автори російськоюПорошин Сергей Михайлович, Бахвалов Валентин Борисович
МПК / Мітки
МПК: G01S 3/02
Мітки: випромінювання, безупинного, радіолокатора, швидкості, радіальної, вимірювач, наведення
Код посилання
<a href="https://ua.patents.su/6-40136-vimiryuvach-radialno-shvidkosti-dlya-radiolokatora-navedennya-bezupinnogo-viprominyuvannya.html" target="_blank" rel="follow" title="База патентів України">Вимірювач радіальної швидкості для радіолокатора наведення безупинного випромінювання</a>
Фазовий далекомір для радіолокатора наведення безупинного випромінювання
Номер патенту: 40134
Опубліковано: 16.07.2001
Автори: Бахвалов Валентин Борисович, Порошин Сергій Михайлович
МПК: G01S 11/00
Мітки: наведення, радіолокатора, далекомір, безупинного, фазовий, випромінювання
Формула / Реферат:
Фазовий далекомір для радіолокатора наведення безупинного випромінювання, що містить передавач безупинного сигналу з генератора безупинного сигналу високої частоти f, генератора низької частоти, що модулюс, F і модулятора, антену, що передає, приймальну антену, приймач із фільтром низької частоти F і фазовимірювач зсуву фаз прийнятого сигналу частоти F щодо сигналу низькочастотного генератора передавача, що відрізняється тим, що приймальна...
Радіолокаційний вимірювач радіальної швидкості
Номер патенту: 40131
Опубліковано: 16.07.2001
Автори: Бахвалов Валентин Борисович, Порошин Сергій Михайлович
МПК: G01S 3/02
Мітки: вимірювач, радіальної, швидкості, радіолокаційний
Формула / Реферат:
Радіолокаційний вимірювач радіальної швидкості, що містить передавач безупинного сигналу з антеною, що передає, приймальну антену, приймач і вимірювач частоти Доплера, який відрізняється тим, що передавач виконаний у виді генератора проміжної частоти fпp і двох помножителей цієї частоти на ціле число N і N+2 відповідно, виходи яких пов'язані з антеною, що передає, до складу приймача додатково включений помножитель проміжної частоти fпp...
Радіолокаційний далекомір безупинного випромінювання
Номер патенту: 40132
Опубліковано: 16.07.2001
Автори: Порошин Сергій Михайлович, Бахвалов Валентин Борисович
МПК: G01S 3/02
Мітки: радіолокаційний, безупинного, випромінювання, далекомір
Формула / Реферат:
Радіолокаційний далекомір безупинного випромінювання, що містить антену, що передає, передавач із генератора безупинного сигналу високої частоти, генератора сигналу, що модулює, і амплітудного модулятора, приймальну антену, приймач і фазовимірювач, що відрізняється тим, що генератор сигналу передавача, що модулює, виконаній у виді двох генераторів синусоїдальних сигналів двох низьких частот, що модулюють, F1 і F2 на виході амплітудного...
Спосіб вимірювання радіальної швидкості цілі для секвентного радіолокатора
Номер патенту: 17468
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 13/06
Мітки: цілі, спосіб, секвентного, радіальної, вимірювання, швидкості, радіолокатора
Формула / Реферат:
Способ измерения радиальной скорости цели для секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде периодической последовательности наносекундных видеоимпульсов без несущей частоты и приеме эхо-сигналов, отраженных от движущейся цели, отличающийся тем, что выбирают частоту следования зондирующих видеоимпульсов значительно больше максимальной допплеровской частоты на верхней частоте спектра излучаемого сигнала,...
Вимірювач швидкості цілі для секвентного радіолокатора
Номер патенту: 17465
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: вимірювач, швидкості, цілі, секвентного, радіолокатора
Формула / Реферат:
Измеритель скорости цели для секвентного радиолокатора, содержащий передатчик, антенну с антенным переключателем, приемник и смеситель зондирующих и эхо-сигналов, отличающийся тем, что передатчик, антенна и приемник выполнены для несинусоидальных периодических импульсных сигналов с частотой следования импульсов F больше максимальной допплеровской частоты сигнала на верхней частоте полосы пропускания антенны, смеситель выполнен по мостовой...
Попередній патент: Радіолокаційний фазовий далекомір безупинного випромінювання
Наступний патент: Спосіб профілактики тромбоемболічних ускладнень у хворих з фібріляцією передсердій
Випадковий патент: Спосіб зонної ректіфікації