Радіолокаційний вимірювач радіальної швидкості
Номер патенту: 40131
Опубліковано: 16.07.2001
Автори: Порошин Сергій Михайлович, Бахвалов Валентин Борисович


Формула / Реферат
Радіолокаційний вимірювач радіальної швидкості, що містить передавач безупинного сигналу з антеною, що передає, приймальну антену, приймач і вимірювач частоти Доплера, який відрізняється тим, що передавач виконаний у виді генератора проміжної частоти fпp і двох помножителей цієї частоти на ціле число N і N+2 відповідно, виходи яких пов'язані з антеною, що передає, до складу приймача додатково включений помножитель проміжної частоти fпp генератора передавача на N+1, а вихід цього помножителя пов'язаний із гетеродиним входом змішувача, на виході якого встановлений підсилювач проміжної частоти fпp приймача, рівній проміжній частоті генератора передавача, вихід вимірювача частоти Доплера пов'язаний з обчислювачем радіальної швидкості цілі по співвідношенню
![]()
де Vp - радіальна швидкість цілі,
Fд- доплерівська частота сигналу па виході детектора приймача,
с - швидкість світла,
N - ціле число,
fпp - проміжна частота генератора передавача.
Текст
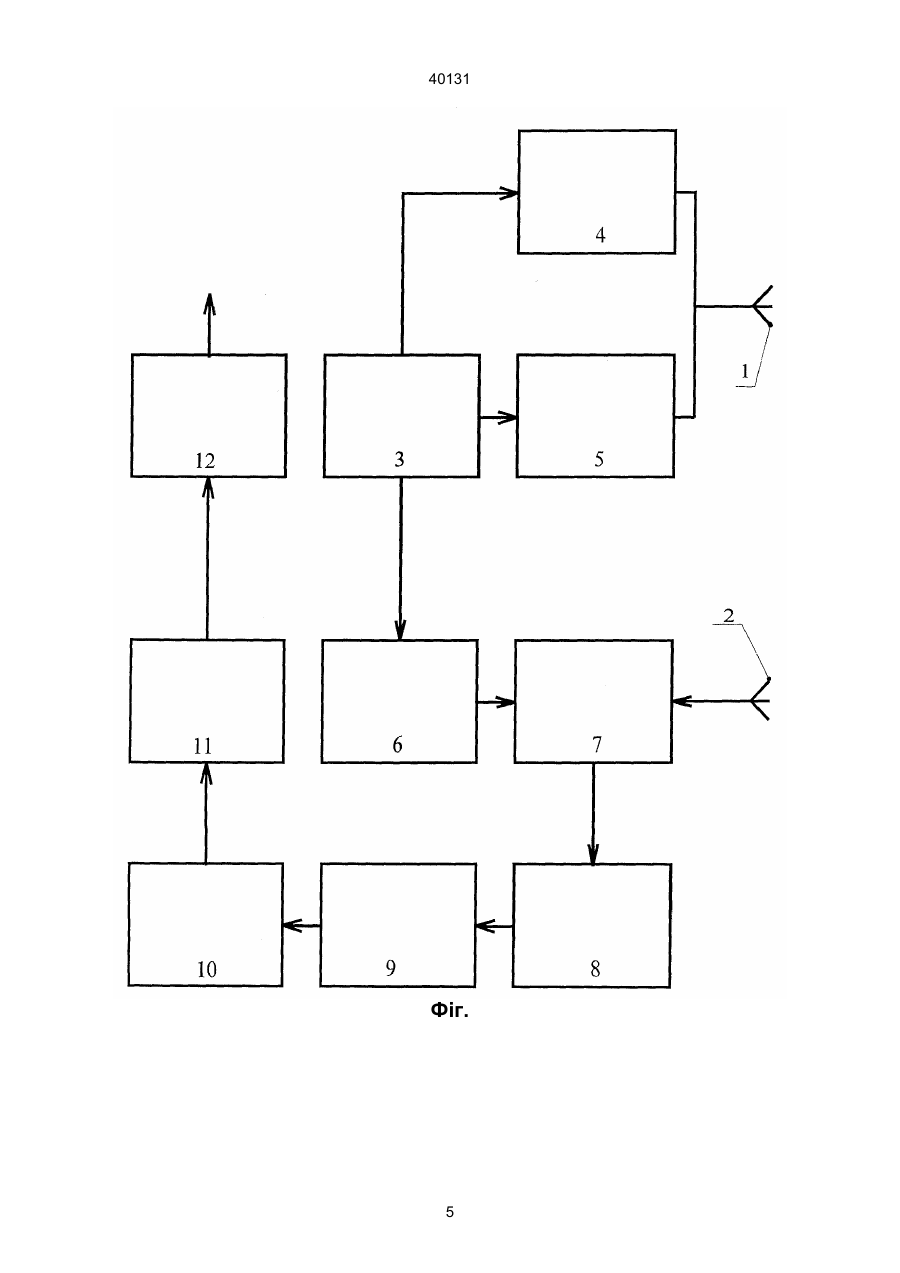
Радіолокаційний вимірювач радіальної швидкості, що містить передавач безупинного сигналу з антеною, що передає, приймальну антену, приймач і вимірювач частоти Доплера , що відрізняється тим, що передавач виконаний у виді генератора проміжної частоти fпр і двох помножувачів цієї частоти на ціле число N і N+2 відповідно, виходи яких пов'язані з антеною, що передає, до складу приймача додатково включений помножувач проміжної частоти fпр генератора передавача на N+1, а вихід цього помножувача пов'язаний із гетеродинним входом змішувача, на виході якого встановлений підсилювач проміжної частоти fпр приймача, рівній проміжній частоті генератора передавача, вихід вимірювача частоти Доплера пов'язаний з обчислювачем радіальної швидкості цілі по співвідношенню Винахід відноситься до області радіолокації і може бути використаний в наземних доплерівських радіолокаторах безупинного випромінювання мікрохвильового діапазону для виміру радіальної швидкості малошвидкісної повітряної цілі. Відомий радіолокаційний доплерівський вимірювач радіальної швидкості безупинного випромінювання [1, с. 95, фіг. 3.2]. Аналог містить приймально-передавальну антену, передавач безупинного сигналу, приймач і вимірювач частоти Доплера. Швидкість цілі визначають за результатами виміру доплерівської частоти. Недоліком аналога є те, що вимір малих радіальних швидкостей цілей і малих частот Доплера ускладнений через наявність на вході вимірювача частоти Доплера низькочастотних флуктуацій напруги, обумовлених флуктуаціями напруг електроживлення радіолокатора, що не вдається приглушити фільтрами низької частоти джерел електроживлення. Інший недолік аналога полягає в тому, що на виході приймача буде високий рівень шумів. Причини цього описані в літературі [1]. За прототип обраний вимірювач доплерівської частоти безупинного випромінювання [2]. До складу прототипу входять такі основні елементи: передавач у вигляді генератора безупинного синусоїдального сигналу з антеною, що передає; приймальна антена; змішувач приймача; детектор; підсилювач частоти Доплера; вимірювач частоти Доплера. У змішувачі приймача як гетеродинна напруга використаний сигнал передавача, що зондує. Частота прийнятого луна-сигналу цілі відрізняється від частоти сигналу, що зондує, на частоту Доплера, тому на виході змішувача прототипу буде виділена різницева частота, яка дорівнює цій частоті Доплера. Для виділення частоти Доплера використаний амплітудний детектор, установлений на виході змішувача приймача. Далі напруга низької частоти Доплера підсилюється та визначається частота Доплера. Радіальну швидкість цілі в прототипі визначають по частоті Доплера за допомогою співвідношення Vp = cFД 4(N + 1)f пр , Vp = l FД 2 , де: Vp - радіальна швидкість цілі; FД - частота Доплера; (1) (19) UA (11) 40131 (13) A де: Vp - радіальна швидкість цілі, FД - доплерівська частота сигналу на виході детектора приймача, с - швидкість світла, N - ціле число, fпp - проміжна частота генератора передавача. 40131 легше виміряти на фоні низькочастотних флуктуацій напруг, що живлять та перешкоджають, радіолокатора. Технічна сутність і принцип дії запропонованого пристрою пояснюється на фігурі, де наведена спрощена структурна схема запропонованого радіолокатора. До складу запропонованого пристрою на схемі входять такі основні елементи: антена, що передає, 1; приймальна антена 2; генератор 3 проміжної частоти fпр, використовуваної в передавачі і приймачі; перший помножувач 4 проміжної частоти fпр на ціле число N передавача; другий помножувач 5 проміжної частоти fпр на (N+2) передавача; помножувач 6 проміжної частоти fпр на (N+1) приймача (напруга з виходу цього помножувача використана як гетеродинна напруга приймача); змішувач 7 приймача; підсилювач 8 проміжної частоти fпр приймача; детектор 9; підсилювач 10 частоти Доплера; вимірювач частоти Доплера 11; обчислювач радіальної швидкості 12 за співвідношенням (2). Принцип дії запропонованого пристрою пояснюється таким чином. Для ослаблення низькочастотних шумів у приймачі запропонованого пристрою використовують не нульову, а порівняно високу проміжну частоту fпр. Підвищення точності виміру малих радіальних швидкостей малошвидкісної цілі забезпечується таким шляхом. Пропонується використовувати зондуючий сигнал на двох частотах, що відрізняються на дві проміжні частоти приймача fпр, а як гетеродинну частоту приймача використовувати частоту, яка дорівнює середньому арифметичному двох частот, що зондують. Тоді на виході змішувача приймача утворяться дві різницеві проміжні частоти, одна з яких дорівнює різниці гетеродинної частоти і нижньої частоти лунасигналу, а інша - різниці верхньої частоти лунасигналу і гетеродинної частоти. Ці дві проміжні частоти посилюють підсилювачем проміжної частоти приймача і детектують амплітудним детектором. На виході детектора утвориться низька різницева частота цих двох проміжних частот, яка дорівнює сумі доплерівських частот на нижній і верхній частотах двочастотного сигналу радіолокатора, що зондує. Це еквівалентно тому, що доплерівська частота як би збільшилася вдвічі. Таке штучне збільшення доплерівської частоти сприяє підвищенню точності вимірів, тому що низькочастотні шуми на вході вимірювача частоти Доплера будуть менше впливати на результати виміру більш високої частоти. Для обгрунтування можливості практичної реалізації запропонованого технічного рішення і його істотних відмітних ознак нижче наводяться необхідні математичні співвідношення. Перший, множник передавача 4 множить частоту fпр генератора 3 на ціле число N, а другий помножувач передавача 5 множить fпр на (N+2). У результаті в антену радіолокатора, що передає, надходить і випромінюється безупинний сигнал, що зондує, на двох частотах f1, f2, які дорівнюють: λ - довжина хвилі. Недоліком прототипу є те, що вимір малих радіальних швидкостей цілей і малих частот Доплера утруднений через наявність на вході вимірювача частоти Доплера низькочастотних флуктуацій напруги, обумовлених флуктуаціями напруг електроживлення радіолокатора, що не вдається придушити фільтрами низької частоти джерел електроживлення. Інший недолік прототипу полягає в тому, що на виході змішувача буде високий рівень шумів. Приймач прототипу можна розглядати як супергетеродинний приймач із нульовою проміжною частотою, а як гетеродинна напруга використаний сигнал передавача, що зондує. При цьому на виході змішувача виникають так називані миготливі шуми, потужність котрих обернено пропорційна частоті і зростає на низьких частотах. Ці шуми істотно знижують чутливість приймача і заважають вимірювати низькі частоти Доплера. В основу винаходу поставлена задача удосконалення радіолокаційного вимірювача радіальної швидкості, у якому, за рахунок виконання передавача з двочастотним сигналом і використання генератора передавача з помножувачем частоти як гетеродина приймача, забезпечується збільшення вдвічі доплерівської частоти сигналу на виході детектора приймача, що підвищує точність виміру малих радіальних швидкостей цілі. Поставлена задача вирішується тим, що в радіолокаційному вимірювачі радіальної швидкості, що містить передавач безупинного сигналу з антеною, що передає, приймальну антену, приймач із змішувача, детектора, підсилювача і вимірювач частоти Доплера, відповідно до винаходу: передавач виконаний у вигляді генератора проміжної частоти fпp і двох помножувачів цієї частоти на ціле число N і N+2, відповідно, виходи яких пов'язані з антеною, що передає; до складу приймача додатково включений помножувач проміжної частоти fпр генератора передавача на N+1, а вихід цього помножувача пов'язаний із гетеродинним входом змішувача, на виході якого встановлений підсилювач проміжної частоти fпр приймача, рівній проміжній частоті генератора передавача; вихід вимірювача частоти Доплера пов'язаний з обчислювачем радіальної швидкості цілі за співвідношенням Vp = cFД 4(N + 1)f пр , (2) де: Vp - радіальна швидкість цілі; FД - доплерівська частота сигналу на виході приймача; с - швидкість світла; N - ціле число; fпр - проміжна частота генератора передавача. Принцип дії запропонованого пристрою заснований на використанні двочастотного сигналу, що зондує, перетворення якого в змішувачі приймача і детекторі призводить до додавання доплерівських частот першого і другого сигналів, що зондують. У результаті доплерівська частота результуючого сигналу на виході детектора приймача зросте і її 2 40131 f1 = Nf пр ; де: Vp - радіальна швидкість цілі; с - швидкість світла; f1, f2 - нижня і верхня частоти двочастотного сигналу, що зондує. Підставляючи (11), (12) у (10), одержимо співвідношення (2), що рекомендується використовувати для визначення радіальної швидкості цілі за результатом виміру частоти Доплера FД на виході приймача радіолокатора за допомогою вимірювача частоти 11. Використання помножувачів частоти в передавачі і приймачі запропонованого пристрою потрібне для одержання на виході детектора приймача сумарної доплерівської частоти FД, що більше, ніж доплерівські частоти FД1, FД2 на окремих частотах сигналу, що зондує, а вимір більшої частоти вимірювачем 11 сприяє зменшенню похибки виміру у випадках, коли радіальна швидкість цілі мала. Підсилювач проміжної частоти приймача 8 потрібний для посилення і виділення в його смуговому фільтрі двох проміжних частот fпр1, fпр2 сигналу в приймачі. Ці частоти відрізняються на порівняно малий розмір FД і можуть бути виділені вузькосмуговим фільтром підсилювача проміжної частоти 8. Таким чином, запропонованій пристрій може бути практично реалізований, а зазначені вище його відмінні ознаки є суттєвими і принципово необхідними для реалізації цього пристрою. Основні елементи запропонованого пристрою на схемі (фіг.) виконані таким чином. Передавач радіолокатора виконаний у вигляді генератора 3 проміжної частоти fпр синусоїдального безупинного сигналу і двох помножувачів частоти 4, 5, перший з яких множить частоту fпр на ціле число N, а другий - на (N+2). При цьому частоти сигналу, що зондує, fl, f2 обирають у мікрохвильовому діапазоні, а проміжна частота fпр значно менше f1, f2. Антена, що передає 1, повинна бути екранована від приймальної антени (наприклад, за допомогою плоского металевого екрана, розташованого між антенами) для того, щоб сигнали передавача не потрапляли в приймальну антену і не заважали приймати луна-сигналу цілі. Приймач виконаний у вигляді супергетеродинного приймача з проміжною частотою fпр, а як гетеродин приймача використаний помножувач 6 частоти fпp на (N+1). Помножувачі частоти 4, 5, 6 мають відому конструкцію. Підсилювач проміжної частоти 8 повинен мати смуговий фільтр для виділення двох проміжних частот приймача. Наявність амплітудного детектора 9 на виході приймача принципово необхідна для виділення доплерівської частоти FД. Підсилювач частоти Доплера 10 і вимірювач частоти Доплера 11 не відрізняються від відповідних елементів прототипу. Обчислювач 12 подає мікроЕОМ для обчислення радіальної швидкості цілі за результатом виміру частоти FД за допомогою співвідношення (2). Динаміка роботи запропонованого пристрою здійснюється таким шляхом. Передавач формує, а антена, що передає 1, випромінює безупинний двочастотний сигнал. Приймальна антена 2 приймає луна-сигнали цілі на двох частотах, що відрізняються від частот сигналу, що зондує, на відповідні частоти Доплера. Далі ці сигнали перетворюються на проміжні частоти за допомогою змішувача 7 і помножувача частоти 6, що використаний як (3) f 2 = (N + 2)f пр ; (4) де: f1 - нижня частота двочастотного сигналу, що зондує; f2 - верхня частота двочастотного сигналу, що зондує; fпр - проміжна частота генератора 3 передавача; N - ціле число. При відбитку від рухомої цілі частоти двочастотного сигналу, що зондує, зміняться на частоту Доплера, що буде різною для різних частот сигналу, що зондує, а приймальна антена радіолокатора прийме луна-сигнал цілі на двох частотах f'1, f'2, які дорівнюють ¢ f1 = f1 + FД1; (5) ¢ f 2 = f 2 + FД 2; (6) де: f'1 - нижня частота луна-сигналу цілі; f'2 - верхня частота луни-сигналу цілі; f1 - нижня частота сигналу, що зондує; f2 - верхня частота сигналу, що зондує; FД1 - частота Доплера на нижній частоті сигналу, що зондує; FД2 - частота Доплера на верхній частоті сигналу, що зондує, множник приймача 6 множить частоту генератора 3 fпр на (N+1) і напругу з виходу множника 6 використовують як гетеродинну напругу приймача, частота якого буде дорівнювати f Г = ( N + 1)f пр , (7) де: fпр - проміжна частота генератора 3; N - ціле число; fГ - частота гетеродинної напруги приймача. На виході змішувача 7 виділяються дві різницеві проміжні частоти fпр1, fпр2, які дорівнюють ¢ f пр1 = f Г - f1 = f пр - FД1 (8) f пр 2 = f1¢- f Г = f пр + FД1 (9) де: f'1, f'2 - нижня і верхня частоти луна-сигналу цілі; fпр1, fпр2 - нижня і верхня проміжні частоти на виході змішувача приймача. На виході амплітудного детектора приймача 9 виділяється низка різницева частота FД, яка дорівнює F = f пр 2 - f пр1 = FД1 + FД 2, (10) де: FД - частота сигналу на виході детектора приймача 9, яка дорівнює сумі доплерівських частот FД1, FД2 на нижній і верхній частотах сигналу, що зондує. Ці доплерівські частоти визначаються за такими відомими співвідношеннями FД1 = 2Vp f1 FД 2 = , c 2Vpf 2 c (11) , (12) 3 40131 гетеродин приймача. На виході змішувача 7 утворяться дві проміжні частоти, що виділяються смуговим фільтром підсилювача проміжної частоти 8 і посилюються цим підсилювачем. Далі прийняті сигнали детектують амплітудним детектором 9, а на виході його утворюється низькочастотний сигнал, частота котрого FД дорівнює сумі доплерівських частот на нижній і верхній частотах сигналу, що зондує. Низькочастотний сигнал на частоті FД посилюють підсилювачем 10 і вимірюють частоту цього сигналу за допомогою вимірювача частоти Доплера 11. Обчислювач 12 обчислює радіальну швидкість цілі за результатом виміру частоти FД за допомогою співвідношення (2). Таким чином, запропонований пристрій вирішує поставлену задачу, усуває відзначені недоліки прототипу і аналогу і забезпечує визначення радіальної швидкості малошвидкісної цілі з більш високою точністю, ніж прототип. Джерела інформації: 1. Сколник М. Введение в технику радиолокационных систем / Пер. с англ. под редакцией К.Н. Трофимова. - М.: Мир, 1965. 2. Висин В.В., Власов О.В. и др. Радиолокационные устройства (теория и принципы построения) / Под. ред. В.В. Григорина-Рябова. - М.: Сов. радио, 1970. - С. 33, рис. 2.16 (прототип). 4 40131 Фіг. 5 40131 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 6
ДивитисяДодаткова інформація
Назва патенту англійськоюRadar detector of radial range rate
Автори англійськоюPoroshyn Serhiy Mykhailovych, Bakhvalov Valentyn Borysovych
Назва патенту російськоюРадиолокационный измеритель радиальной скорости
Автори російськоюПорошин Сергей Михайлович, Бахвалов Валентин Борисович
МПК / Мітки
МПК: G01S 3/02
Мітки: радіолокаційний, радіальної, швидкості, вимірювач
Код посилання
<a href="https://ua.patents.su/6-40131-radiolokacijjnijj-vimiryuvach-radialno-shvidkosti.html" target="_blank" rel="follow" title="База патентів України">Радіолокаційний вимірювач радіальної швидкості</a>
Радіолокатор беззупинного випромінювання
Номер патенту: 40130
Опубліковано: 16.07.2001
Автори: Бахвалов Валентин Борисович, Порошин Сергій Михайлович
МПК: G01S 3/02
Мітки: радіолокатор, беззупинного, випромінювання
Формула / Реферат:
Радіолокатор безупинного випромінювання, що містить антену, що передає, передавач безупинного сигналу з генератора високої частоти, генератора низької частоти, що модулює, і модулятора, приймальну антену, приймач і фазовимірювач, що відрізняється тим, що передавач виконаний із частотно-модульованим сигналом, до складу пристрою додатково включений фільтр низької частоти, що модулює, амплітудний детектор сигналу на частоті Доплера, амплітудний...
Радіолокаційний вимірювач кутової координати цілі
Номер патенту: 17455
Опубліковано: 06.05.1997
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: вимірювач, координати, кутової, радіолокаційний, цілі
Формула / Реферат:
Радиолокационный измеритель угловой координаты цели, содержащий зеркальную антенну типа параболический цилиндр с облучателем в виде вибратора с металлическим контррефлектором, связанную через антенный переключатель с передатчиком периодических импульсных сигналов и приемником, связанным последовательно с индикатором, отличающийся тем, что передатчик выполнен для несинусоидальных импульсных сигналов чередующейся полярности наносекундной...
Радіолокаційний вимірювач параметрів руху наземних транспортних засобів
Номер патенту: 23871
Опубліковано: 16.10.2000
Автор: Непорада Сергій Миколайович
МПК: G01S 11/00
Мітки: параметрів, вимірювач, руху, транспортних, наземних, засобів, радіолокаційний
Формула / Реферат:
Радиолокационный измеритель параметров движения наземных транспортных средств, содержащий соединенные СВЧ генератор и циркулятор, две приемо-передаю-щие антенны, смеситель, выход которого соединен с входом усилителя доплеровских частот, который через фильтр с фазовой автоподстройкой частот соединен с устройством измерения пройденного пути, скорости и ускорения, отличающийся тем, что выход циркулятора соединен со входом дополнительно...
Радіолокаційний вимірювач кута місця цілі
Номер патенту: 13421
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Родін Олександр Валерійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: радіолокаційний, місця, кута, вимірювач, цілі
Формула / Реферат:
Радиолокационный измеритель угла места цели, содержащий передатчик, приемник, индикатор и приемо-передающую антенну с антенным переключателем, согласно изобретению передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, антенна выполнена в виде вибраторной решетки с плоским металлическим рефлектором, в которой расстояние между вибраторами по высоте равно высоте h подъема нижнего...
Пристрій для вимірювання дальності та радіальної швидкості
Номер патенту: 15338
Опубліковано: 30.06.1997
Автори: Самуль Юрій Володимирович, Челпанов Володимир Валентинович
МПК: G01S 13/00
Мітки: пристрій, вимірювання, дальності, швидкості, радіальної
Формула / Реферат:
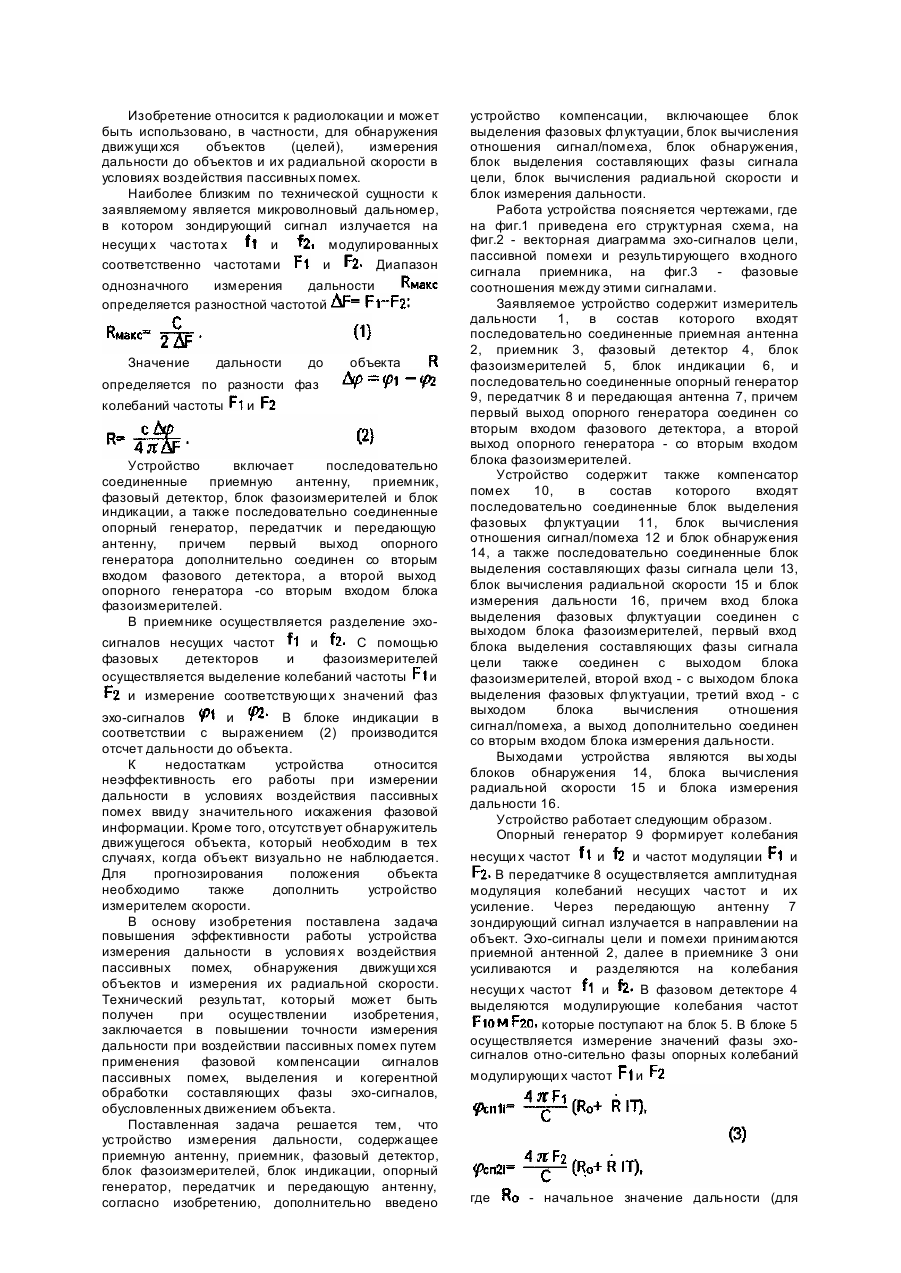
Устройство для измерения дальности и радиальной скорости, содержащее последовательно соединенные приемную антенну, приемник, фазовый детектор, блок фазоизмерителей и блок индикации, а также последовательно соединенные опорный генератор, передатчик и передающую антенну, причем первый выход опорного генератора дополнительно соединен со вторым входом фазового детектора, а второй выход -с вторым входом блока фазоизмерителей, отличающееся тем, что...
Попередній патент: Радіолокатор беззупинного випромінювання
Наступний патент: Радіолокаційний далекомір безупинного випромінювання
Випадковий патент: Склад для лікування болю в глибоких тканинах, пов'язаного з остеоартритом