Частотно – регульований електропривід
Номер патенту: 42476
Опубліковано: 15.10.2001
Автори: Мазур Руслан Анатолійович, Соседка Вілій Лукич, Бельмас Світлана Дмитріївна
Формула / Реферат
Частотно-регульований електропривід, що складається із задавача інтенсивності, перетворювача "напруга-частота", вихід якого з'єднаний із другим частотним входом блока прямого перетворення координат, з елемента порівняння, на другий відраховуючий вхід якого подається сигнал завдання абсолютного ковзання, а вихід з'єднаний із входом регулятора, вихід регулятора - із першим входом блока прямого перетворення координат, виходи якого підключені до входів автономного інвертора, силові виходи останнього з'єднані із асинхронним двигуном, який відрізняється тим, що в нього додатково введені нелінійний блок завдання абсолютного ковзання, імпульсний датчик швидкості, блок визначення відносного ковзання, суматор та блок множення, причому вихід задавача інтенсивності з'єднаний із першим входом суматора та входом нелінійного блока завдання абсолютного ковзання, вихід якого зв'язаний з другим входом суматора, вихід суматора з'єднаний із другим входом блока множення та частотним входом перетворювача "напруга-частота", вихід якого підключений до, другого входу блока визначення відносного ковзання, перший вхід якого з 'єднаний із виходом імпульсного датчика швидкості, вхід останнього зв'язаний з ротором асинхронного двигуна, вихід блока визначення відносного ковзання підключений до першого входу блока множення, вихід якого з'єднаний із першим входом елемента порівняння, другий відраховуючий вхід якого з'єднаний із виходом нелінійного блока завдання абсолютного ковзання.
Текст
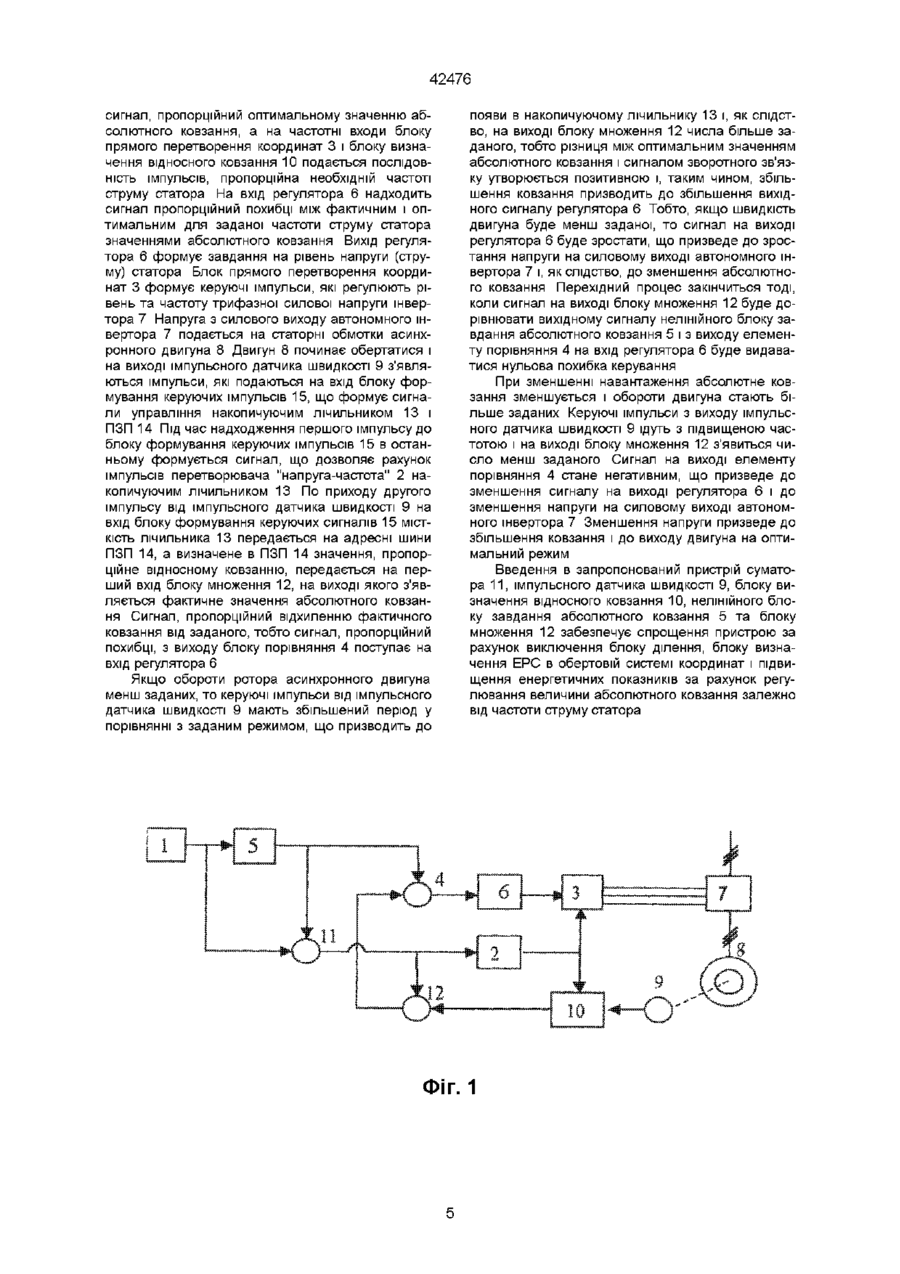
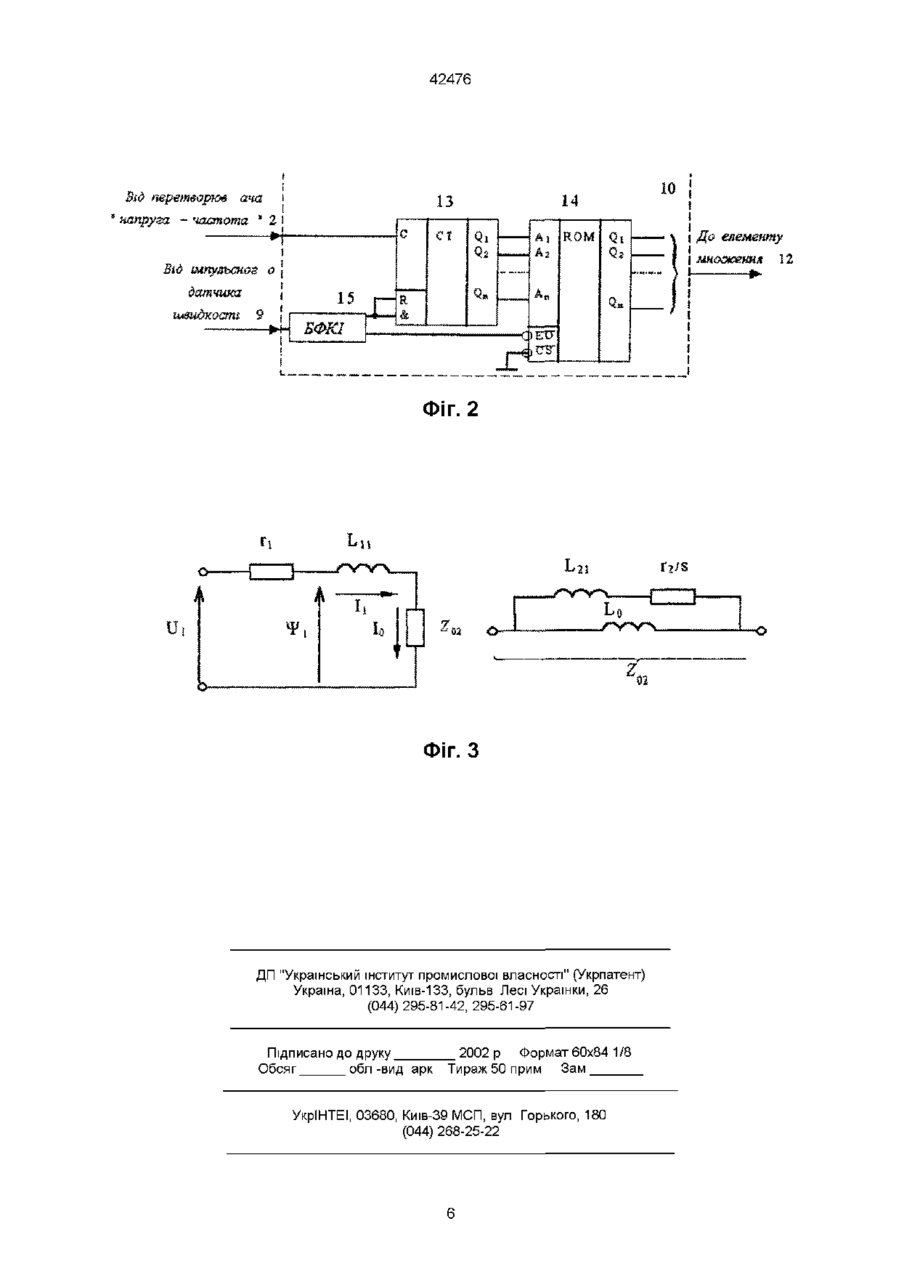
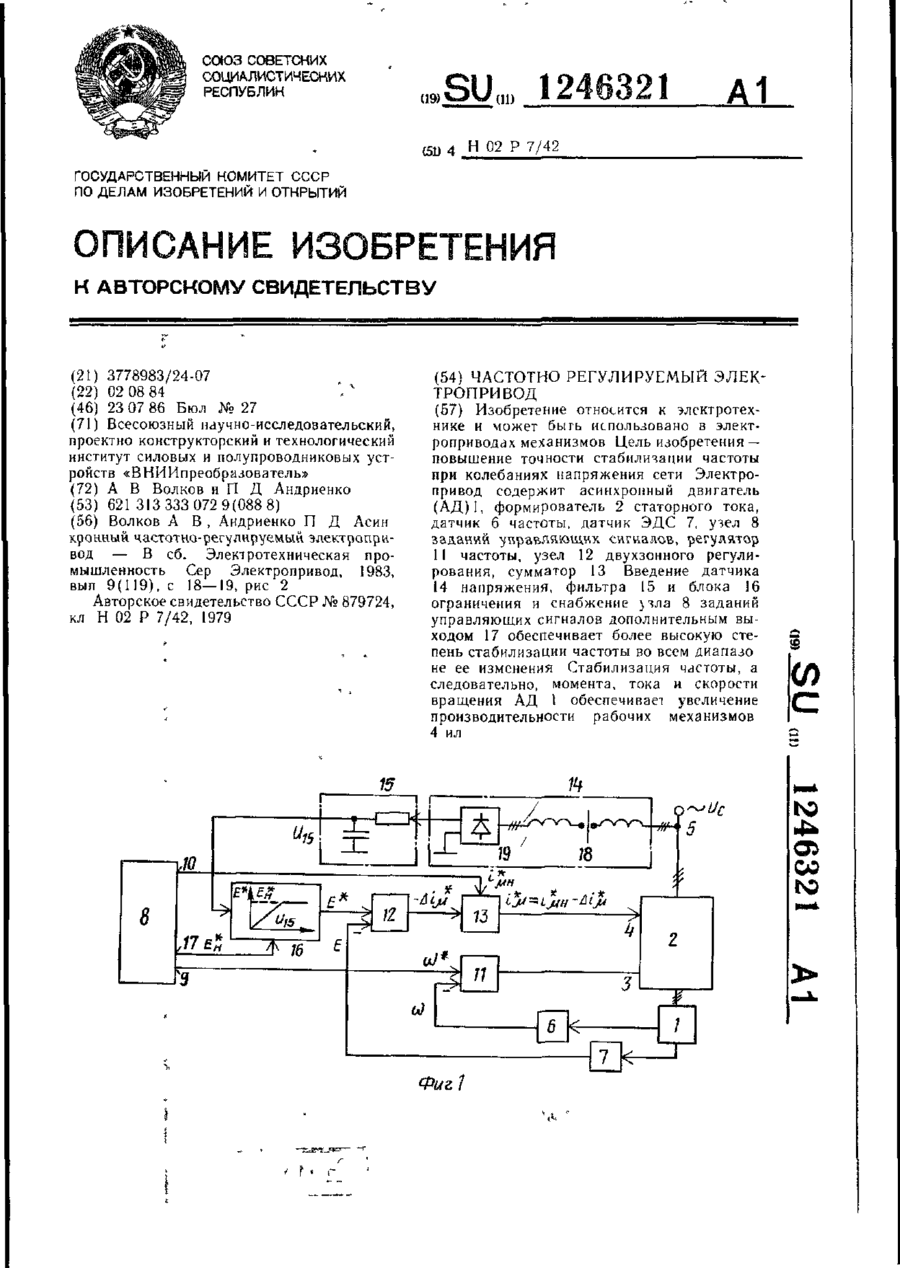
Частотно-регульований електропривід, що складається із задавача інтенсивності, перетворювача "напруга-частота", вихід якого з'єднаний із другим частотним входом блока прямого перетворення координат, з елемента порівняння, на другий відраховуючий вхід якого подається сигнал завдання абсолютного ковзання, а вихід з'єднаний із входом регулятора, вихід регулятора - із першим входом блока прямого перетворення координат, виходи якого підключені до входів автономного інвертора, силові виходи останнього з'єднані із аси нхронним двигуном, який відрізняється тим, що в нього додатково введені нелінійний блок завдання абсолютного ковзання, імпульсний датчик швидкості, блок визначення відносного ковзання, суматор та блок множення, причому вихід задавача інтенсивності з'єднаний із першим входом суматора та входом нелінійного блока завдання абсолютного ковзання, вихід якого зв'язаний з другим входом суматора, вихід суматора з'єднаний із другим входом блока множення та частотним входом перетворювача "напруга-частота", вихід якого підключений до другого входу блока визначення відносного ковзання, перший вхід якого з'єднаний із виходом імпульсного датчика швидкості, вхід останнього зв'язаний з ротором асинхронного двигуна, вихід блока визначення відносного ковзання підключений до першого входу блока множення, вихід якого з'єднаний із першим входом елемента порівняння, другий відраховуючий вхід якого з'єднаний із виходом нелінійного блока завдання абсолютного ковзання Винахід відноситься до електротехніки і може бути використаний у регульованому електроприводі з асинхронними електродвигунами різноманітного призначення Відомий частотно-регульований електропривод, в якому використовується принцип стабілізації кута між струмом і напругою статора при ЗМІНІ навантажувального моменту (а с СРСР №1275731, кл Н02Р7/42, 1986) Пристрій містить асинхронний двигун, датчики струму, елемент порівняння, задавач частоти струму статора, регулятор, перетворювач частоти, нелінійний блок, що реалізує залежність кута між векторами напруги і струму статора від частоти струму статора, блок зворотного перетворення координат і блок ділення За допомогою цього пристрою вдається стабілізувати величину абсолютного ковзання, що призводить до підтримки швидкості обертання електродвигуна на заданій частоті при ЗМІНІ навантажувального моменту Однак під час роботи двигуна на низьких швидкостях підтримка абсолютного ковзання на постійному рівні призводить до підвищеної втрати потужності в активних опорах і, як слідство, до зменшення коефіцієнта корисної дії приводу Крім того, цей винахід містить блок зво ротного перетворення координат і блок ділення, що ускладнює технічну реалізацію пристрою Найбільш близьким по технічній суті і досягаемому результату є частотно-регульований електропривод, що містить асинхронний двигун, датчики напруги, датчики струму, силовий перетворювач частоти, блок прямого перетворення координат, регулятор, елемент порівняння, задавач інтенсивності, перетворювач "напруга-частота", блок ділення і блок визначення ЕРС (а с СРСР №1823125, кл Н02Р7/42, 1993) Цей пристрій дозволяє в обертовій системі координат, зв'язаній з струмом статора, стабілізувати кут між складовими вектора ЕРС ротора і, завдяки цьому, стабілізувати кут між струмом статора і потокозчепленням ротора, що, по-перше, при будь-якому струмі забезпечує максимальний для цього струму електромагнітний момент, а, по-друге, забезпечує стабілізацію абсолютного ковзання і, як слідство цього, призводить до стабілізації частоти обертання ротора Однак реалізація цього пристрою ускладнена і дає низьку точність Це пояснюється тим, що блок визначення ЕРС і блок ділення технічно складно реалізуються і при ЗМІНІ оборотів двигуна (у пере (О 42476 хідних режимах) мають низьку точність Складність технічної реалізації пояснюється великою КІЛЬКІСТЮ блоків, а низька точність - необхідністю визначення похідних струму і різноманітними допущеннями, прийнятими при визначенні ЕРС двигуна у перехідних режимах Наприклад, величина падіння напруги на індуктивному опорі у перехідних режимах, пропорційна ЗМІНІ частоти струму, в пристрої замінена на похідну від модуля струму Крім того, стабілізація абсолютного ковзання призводить до підвищених втрат енергії під час роботи двигуна з низькою частотою струму статора Таким чином, пристрій, прийнятий як прототип, має значну складність технічної реалізації, відносно низьку точність в визначенні абсолютного ковзання і підвищені втрати енергії під час роботи двигуна на низьких швидкостях В основу винаходу поставлено задачу удосконалення частоти о-регульованого електроприводу шляхом введення суматора, імпульсного датчика швидкості, блоку визначення відносного ковзання, нелінійного блоку завдання абсолютного ковзання та блоку множення, що забезпечує підвищення енергетичних показників за рахунок регулювання величини абсолютного ковзання залежно від частоти струму статора та спрощення пристрою за рахунок виключення технічно складних блоку ділення і блоку визначення ЕРС в обертовій системі координат Поставлена задача вирішується тим, що у частотно-регульований електропривод, що складається із задавача інтенсивності, перетворювача "напруга-частота", вихід якого з'єднаний із другим частотним входом блоку прямого перетворення координат, з елементу порівняння, на другий відраховуючий вхід якого подається сигнал завдання абсолютного ковзання, а вихід з'єднаний із входом регулятора, вихід регулятора - із першим входом блоку прямого перетворення координат, виходи якого підключені до входів автономного інвертора, силові виходи останнього з'єднані із асинхронним двигуном, згідно з винаходом додатково введені нелінійний блок завдання абсолютного ковзання, імпульсний датчик швидкості, блок визначення відносного ковзання, суматор та блок множення, причому вихід задавача інтенсивності з'єднаний із першим входом суматора та входом нелінійного блоку завдання абсолютного ковзання, вихід якого зв'язаний з другим входом суматора, вихід суматора з'єднаний із другим входом блоку множення та частотним входом перетворювача "напругачастота", вихід якого підключений до другого входу блока визначення відносного ковзання, перший вхід якого з'єднаний із виходом імпульсного датчика швидкості, вхід останнього зв'язаний з ротором асинхронного двигуна, вихід блоку визначення відносного ковзання підключений до першого входу блока множення, вихід якого з'єднаний із першим входом елементу порівняння, другий відраховуючий вхід якого з'єднаний із виходом нелінійного блоку завдання абсолютного ковзання Частотно-регульований електропривод (фіг 1) складається із задавача інтенсивності 1, перетворювача "напруга-частота" 2, вихід якого з'єднаний із другим частотним входом блоку прямого перетворення координат 3, з елементу порівняння 4, на другий відраховуючий вхід якого подається сигнал завдання абсолютного ковзання, а вихід з'єднаний із входом регулятора 6 Вихід регулятора 6 з'єднаний із першим входом блоку прямого перетворення координат 3, виходи якого підключені до входів автономного інвертора 7, який силовими виходами з'єднаний із асинхронним двигуном 8 В частотнорегульований електропривод введені нелінійний блок завдання абсолютного ковзання 5, імпульсний датчик швидкості 9, блок визначення відносного ковзання 10, суматор 11 та блок множення 12 Причому вихід задавача інтенсивності 1 з'єднаний із першим входом суматора 11 та входом нелінійного блоку завдання абсолютного ковзання 5 Вихід нелінійного блоку завдання абсолютного ковзання 5 зв'язаний з другим входом суматора 11, вихід якого з'єднаний із другим входом блоку множення 12 та частотним входом перетворювача "напруга-частота" 2 Вихід перетворювача "напруга-частота" 2 підключений до другого входу блока визначення відносного ковзання 10, перший вхід якого з'єднаний із виходом імпульсного датчика швидкості 9, вхід останнього зв'язаний з ротором асинхронного двигуна 8 Вихід блоку визначення відносного ковзання 10 підключений до першого входу блока множення 12, вихід якого з'єднаний із першим входом елементу порівняння 4, другий відраховуючий вхід якого з'єднаний із виходом нелінійного блоку завдання абсолютного ковзання 5 На фіг 1 зображено функціональну схему частотно-регульованого електропривода, на фіг 2 схему блока визначення відносного ковзання, на фіг 3 - схему заміщення асинхронної елактромашини Де Всі блоки частотно-регульованого електропривода, окрім нелінійного блоку завдання абсолютного ковзання 5, імпульсного датчика швидкості 9, блоку визначення відносного ковзання 10, суматора 11 та блоку множення 12, описані в прототипі Нелінійний блок завдання абсолютного ковзання 5, залежно від завдання на кутову швидкість ротора со асинхронного двигуна 8, формує завдання на абсолютне ковзання р згідно з формулою • (-гіг 2 + ifrf +co 2 r 1 (L 2 0 r 2 р - КІЛЬКІСТЬ пар полюсів, г-і, Г2 - активні опори статора та ротора, ВІДПОВІДНО, І_о, І-2 - індуктивності головного магнітного зазору та ротору, ВІДПОВІДНО Як відомо, повна потужність, яку споживає трифазний асинхронний двигун, складається з втрат в активному опорі статора і електромагнітної потужності, яку статор передає в ротор (1) S = 307 її = ЗЇ1СЇ1Г, + Ё7), Ui - напруга статора, І1 - струм сектора, гі - активний опір статора, - ЕРС статора 42476 ЕРС статора відтворює потік розсіювання, який розсіюється на індуктивності І_ц і потік магнітного зазору 4* о (2) Е Ї = i i - ( j ( o 1 L 1 1 + Z 0 2 ) l і відтворення електромагнітного моменту Реактивна потужність розсіюється в магнітному зазорі Виходячи з того, що поле в повітряному зазорі обертається із швидкістю ам/р, електромагнітний момент становить Де pPL 2 0 r 2 4'1 - потік статора, сої - кутова частина напруги живлення, ZQ2 - комплексний опір кіл повітряного зазору і (9) М = r | + (pPL 2 ) со-,/р (0-,/р 2 pPL 2 0 r 2 ротора (фіг 3) Згідно З фіг З 2 г | + (pPL 2 ) ' jco 1 L 0 (r 2 +jco 1 sL 2 1 ) r 2 +jco 1 s(L 0 Z02 Де -електромагнітний момент, pPL 2 0 r 2 s=co2/coi - відносне ковзання, (02 - кутова частота струму ротора Підставляємо значення опору ZQ2 В (2) jmiL0(r2+jm1sL21) jco 1 L 1 1 Зводимо (3) до загального знаменника Р в =3(O 1 I 1 d -2 У - електромагнітна поГ 2 +(РРЬ 2 ) тужність Коефіцієнт корисної дії асинхронного двигуна ті це відношення механічної потужності Рм на валу до загальної потужності S, яку споживає двигун ВІДКІЛЯ Де Li=Lo+Ln - індуктивність статора, І_і=І_о+І_2і - індуктивність ротора Домножив чисельник та знаменник на -jcoisl_2), отримуємо (5) 4*1 = її • L i r 2 ~ m 2 s L 2 ( L 0 - L 1 L 2 ) (10) i; = Де Рм - механічна потужність валу, coscp=P/S - коефіцієнт потужності першої гармоніки напруги живлення, 2 Р = 3I12dn+3a)1I12d - актив або з урахуванням того, що Де со - механічна кутова швидкість ротора, р - КІЛЬКІСТЬ пар полюсів, Р=соо-со - абсолютне ковзання, соо - синхронна кутова швидкість, - P2P2L2(L2O (6) JP pL20r2 ( Р рь 2 ) 2 Проекції вектора потоку статора 4*1 на базиси обертової полярної системи координат (d,q), зорієнтованої по вектору струму статора таким чином, що I 1 d = i i і l1q = 0 де со - кутова швидкість ротору Підставив (11) і (10), отримуємо к _Р т Р 2 сорь 2 0 г 2 _ або з урахуванням того, що со=соо-Р=ам/р-р 2 Hd' на потуж-ність, 4 - узагальнений енергетичний функціонал, значення якого залежить від режиму роботи двигуна Механічна потужність ppL 0 r 2 co (11) : :+(pPL2) 2 2 2 L1r2 -p p L2(L 0-L1L2) r22+(pPL2)2 (7) Hd " pPL 2 0 r 2 З урахуванням (7) загальна потужність, яку споживає трифазний асинхронии двигун становить (8) S = З І 2 ^ + 3I 1 d E7 = 3 I 2 = 3I2dr1+3co1I2d pPL 2 0 r 2 (pPL 2 )' 2 2 rf+(PPL 2 ) 2 3 (8) видно, що активна складова потужності споживається на втрати в активному опорі статора (12) g= № 2 , Г-]Г2 + р В оптимальному енергетичному режимі роботи асинхронного двигуна коефіцієнти корисної дії, потужності, і як слідство, узагальнений енергетичний функціонал наближаються до максимальних значень Максимуму узагальненого енергетичного функціонала буде відповідати таке значення абсолютного ковзання р, при якому виконується рівняння 2. Фі(Р) _ d = 0, dp dp +Р ВІДКІЛЯ оптимальне значення абсолютного ковзання 42476 (13) Як видно із (13), оптимальне значення абсолютного ковзання залежить від частоти струму статора та конструктивних параметрів двигуна Нелінійний блок завдання абсолютного ковзання 5 може бути виконаний, наприклад, у вигляді постійного запам'ятовуючого пристрою у якому "зашиті" заздалегідь розраховані значення оптимального абсолютного ковзання, ВІДПОВІДНІ ДО завдання на необхідну швидкість асинхронного двигуна Імпульсний датчик швидкості 9 може бути виконаний, наприклад, як диск з рівномірно розподіленими по колу прорізами Такий датчик швидкості 9 при обертанні надає ПОСЛІДОВНІСТЬ імпульсів КІЛЬКІСТЬ прорізів залежить від технологічних можливостей механічного обладнання та необхідної частотному електроприводу швидкості системи регулювання Один з варіантів реалізації блоку визначення відносного ковзання 10 показаний на фіг 2 Цей блок реалізований на елементах цифрової техніки і складається з накопичуючого лічильника 13, рахуючий вхід якого з'єднаний з виходом перетворювача "напруга-частота" 2, постійного запам'ятовуючого пристрою (ПЗП) 14, шина адреси якого з'єднана з виходом лічильника 13, блоку формування керуючих імпульсів 15, вхід якого з'єднаний з виходом імпульсного датчика швидкості 9 Перший вихід блока формування керуючих імпульсів 15 з'єднаний з керуючим входом накопичуючого лічильника 13, а другий вихід з керуючим входом ПЗП 14 Шина даних ПЗП 14 з'єднана із другим входом елементу множення 12 Блок визначення відносного ковзання 10 працює таким чином По надходженню першого імпульсу від імпульсного датчика швидкості 9 на вхід блоку формування керуючих імпульсів 15, останній формує сигнал, що дозволяє рахунок імпульсів, які надходять від перетворювача "напруга-частота" 2, накопичуючому лічильнику 13 По надходженню другого імпульсу від датчика швидкості 9 блок формування керуючих імпульсів 15 формує сигнал дозволу передачі накопичених у лічильнику 13 даних на адресні шини ПЗП 14, у якому зашите відповідне значення відносного ковзання і яке по приходу керуючого імпульсу передається на другий вхід елементу множення 12 Тим часом, накопичуючий лічильник 13 готується до нового циклу роботи По приходу наступного імпульсу з датчика швидкості 9 процес визначення відносного ковзання ВІДНОВЛЮЄТЬСЯ Як було вказано вище, в блок визначення відносного ковзання 10 надходить ПОСЛІДОВНІСТЬ імпульсів від імпульсного датчика швидкості 9 Якщо імпульсний датчик швидкості 9 має п прорізів, то кут між прорізами дорівнює 2ті і п рад Припустивши, що ротор двигуна обертається з деякою кутовою швидкістю со, від одного прорізу до наступного + 2ті диск повернеться за час t = — псо На рахуючий вхід накопичуючого лічильника 13 надходять імпульси з частотою, пропорцій ною кутовій синхронній швидкості двигуна соо з деяким коефіцієнтом множення частоти kf і періодом 2л між імпульсами Т = Значення коефіцієнта k f co 0 множення частоти kf обирається залежно від діапазона регулювання швидкості електропривода За час між двома суміжними імпульсами датчика швидкості 9 накопичуючий лічильник 13 нарахує деяку КІЛЬКІСТЬ імпульсів ns, яка чисельно дорівнює n s = — = - Х . _ о . Кожному значенню імпульсів ns, Т п с о яке визначає адресу вибірки ПЗП 14, відповідає деяке заздалегідь розраховане по формулі k.JL (14) s e ( n B ) = 1 n ns і "зашите" в мікросхему пам'яті 14 фактичне значення відносного ковзання асинхронного двигуна Суматор 11 необхідний для формування сигналу завдання на синхронну швидкість двигуна соо Коли на входи суматора 11 подати сигнали завдання на швидкість со3 із виходу задавача інтенсивності 1 та відповідне до завданої швидкості соз у оптимальне значення абсолютного ковзання РОРТ із виходу нелінійного блоку завдання абсолютного ковзання 5, на виході суматору 11 з'явиться значення сигналу завдання на синхронну швидкість двигуна соо, розраховане за формулою СОО=СОЗ+РОРТ Таким чином, в КІНЦІ КОЖНОГО періоду, що визначається імпульсами імпульсного датчика швидкості 9, на приймальних регістрах першого входу блоку множення 12 з'являється код, пропорційний фактичному значенню відносного ковзання Коли на другий вхід блоку множення 12 подати значення синхронної швидкості соо, то на його виході з'явиться величина s Q (n s )-co 0 =со 0 1 - — ПІ |=со0-со=р, тобто, фактичне значення абсолютного ковзання асинхронного двигуна Блоки перетворювача "напруга-частота" 2, порівняння 4, нелінійного завдання абсолютного ковзання 5, суматора 11 та множення 12 зручно реалізуються на елементах мікропроцесорної техніки, наприклад, за допомогою многофункцюнальної плати збору та обробки інформації PCL-812 фірми "Advantech" Частотно-регульований електропривод працює таким чином На задавач інтенсивності 1 подається сигнал, що визначає задану швидкість двигуна Вихідний сигнал задавача інтенсивності 1 соз подається на перший вхід суматора 11 і на вхід нелінійного блоку завдання абсолютного ковзання 5 На виході нелінійного блоку 5 формується значення РОРТ, відповідне до роботи двигуна в оптимальному енергетичному стані Вихідний сигнал суматора 11 формує сигнал завдання на синхронну швидкість двигуна, виходячи з умови СОО=СОЗ+РОРТ Введення в систему регулювання суматора 11 та перетворювача "напруга-частота" 2 дозволяє при всіх сигналах завдання на швидкість відносно просто формувати частоту поля статора соі=рсоо, де р - КІЛЬКІСТЬ пар полюсів двигуна Таким чином, на другий відраховуючий вхід елементу порівняння 4 з виходу нелінійного блоку 5 подається 42476 сигнал, пропорційний оптимальному значенню абсолютного ковзання, а на частотні входи блоку прямого перетворення координат 3 і блоку визначення відносного ковзання 10 подається ПОСЛІДОВНІСТЬ імпульсів, пропорційна необхідній частоті струму статора На вхід регулятора 6 надходить сигнал пропорційний похибці між фактичним і оптимальним для заданої частоти струму статора значеннями абсолютного ковзання Вихід регулятора 6 формує завдання на рівень напруги (струму) статора Блок прямого перетворення координат 3 формує керуючі імпульси, які регулюють рівень та частоту трифазної силової напруги інвертора 7 Напруга з силового виходу автономного інвертора 7 подається на статорні обмотки асинхронного двигуна 8 Двигун 8 починає обертатися і на виході імпульсного датчика швидкості 9 з'являються імпульси, які подаються на вхід блоку формування керуючих імпульсів 15, що формує сигнали управління накопичуючим лічильником 13 і ПЗП 14 Під час надходження першого імпульсу до блоку формування керуючих імпульсів 15 в останньому формується сигнал, що дозволяє рахунок імпульсів перетворювача "напруга-частота" 2 накопичуючим лічильником 13 По приходу другого імпульсу від імпульсного датчика швидкості 9 на вхід блоку формування керуючих сигналів 15 МІСТКІСТЬ лічильника 13 передається на адресні шини ПЗП 14, а визначене в ПЗП 14 значення, пропорційне відносному ковзанню, передається на перший вхід блоку множення 12, на виході якого з'являється фактичне значення абсолютного ковзання Сигнал, пропорційний відхиленню фактичного ковзання від заданого, тобто сигнал, пропорційний похибці, з виходу блоку порівняння 4 поступає на вхід регулятора 6 Якщо обороти ротора асинхронного двигуна менш заданих, то керуючі імпульси від імпульсного датчика швидкості 9 мають збільшений період у порівнянні з заданим режимом, що призводить до появи в накопичуючому лічильнику 13 і, як слідство, на виході блоку множення 12 числа більше заданого, тобто різниця між оптимальним значенням абсолютного ковзання і сигналом зворотного зв'язку утворюється позитивною і, таким чином, збільшення ковзання призводить до збільшення вихідного сигналу регулятора 6 Тобто, якщо швидкість двигуна буде менш заданої, то сигнал на виході регулятора 6 буде зростати, що призведе до зростання напруги на силовому виході автономного інвертора 7 і, як слідство, до зменшення абсолютного ковзання Перехідний процес закінчиться тоді, коли сигнал на виході блоку множення 12 буде дорівнювати вихідному сигналу нелінійного блоку завдання абсолютного ковзання 5 і з виходу елементу порівняння 4 на вхід регулятора 6 буде видаватися нульова похибка керування При зменшенні навантаження абсолютне ковзання зменшується і обороти двигуна стають більше заданих Керуючі імпульси з виходу імпульсного датчика швидкості 9 ідуть з підвищеною частотою і на виході блоку множення 12 з'явиться число менш заданого Сигнал на виході елементу порівняння 4 стане негативним, що призведе до зменшення сигналу на виході регулятора 6 і до зменшення напруги на силовому виході автономного інвертора 7 Зменшення напруги призведе до збільшення ковзання і до виходу двигуна на оптимальний режим Введення в запропонований пристрій суматора 11, імпульсного датчика швидкості 9, блоку визначення відносного ковзання 10, нелінійного блоку завдання абсолютного ковзання 5 та блоку множення 12 забезпечує спрощення пристрою за рахунок виключення блоку ділення, блоку визначення ЕРС в обертовій системі координат і підвищення енергетичних показників за рахунок регулювання величини абсолютного ковзання залежно від частоти струму статора ФІГ. 1 42476 Від треторюв ача і 10 14 13 напруга - частота * 2 і с і До елементу Qi множення Від УАпудъсноз о датчика Q» швидкості 9 БФКІ Фіг. 2 Lп и Z. Фіг. З ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Киів-133, бульв Лесі Українки, 26 (044)295-81-42, 295-61-97 Підписано до друку 2002 р Формат 60x84 1/8 Обсяг обл -вид арк Тираж 50 прим Зам УкрІНТЕІ, 03680, Киів-39 МСП, вул Горького, 180 (044) 268-25-22 12
ДивитисяДодаткова інформація
Назва патенту англійськоюVariable-frequency electric drive
Автори англійськоюBelmas Svitlana Dmytriivna, Mazur Ruslan Anatoliiovych, Sosedka Vilii Lukych
Назва патенту російськоюЧастотно-регулируемый электропривод
Автори російськоюБельмас Светлана Дмитриевна, Мазур Руслан Анатольевич, Соседка Вилий Лукич
МПК / Мітки
МПК: H02P 27/04
Мітки: регульованій, частотної, електропривід
Код посилання
<a href="https://ua.patents.su/6-42476-chastotno-regulovanijj-elektroprivid.html" target="_blank" rel="follow" title="База патентів України">Частотно – регульований електропривід</a>
Частотно-регульований електропривід
Номер патенту: 8810
Опубліковано: 30.09.1996
Автори: Андрієнко Петро Дмитрович, Волков Олександр Васильович
МПК: H02P 27/04
Мітки: частотно-регульований, електропривід
Формула / Реферат:
Частотно-регулируемый электропривод, содержащий асинхронный двигатель, обмотки которого подключены к выходам формирователя статорного тока, снабженного первым и вторым управляющими входами и клеммами для подключения питающей сети, датчик частоты и датчик ЭДС, связанные с асинхронным двигателем, узел заданий управляющих сигналов с первым и вторым выходами, регулятор частоты, подключенный управляющим входом к первому выходу узла заданий...
Слідкуючий електропривід зі змінним моментом інерції

Номер патенту: 36098
Опубліковано: 16.04.2001
Автори: Пекеліс Дмитро Аркадійович, Лебеденко Юрій Олександрович, Боярчук Володимир Петрович, Балін Генадій Миколайович, Аркадьєв Віктор Юрійович
МПК: G05B 11/01, G05B 13/02
Мітки: моментом, електропривід, змінним, слідкуючий, інерції
Текст:
...зміна сигналу з виходу функціонального регулятора 12, що еквівалентно зміні параметрів самоналагоджуваного регулятору 9 швидкості. Сигнал джерела 14 опорного струму, пропорційний статичному струму ІС електродвигуна, й дат чика 7 струму якорю ІЯ, електродвигуна 2, просумовані суматором 15, формують на його виході сигнал динамічного моменту електроприводу Мдин Сm(ІЯ-ІС), де Сm - конструктивна постійна еле= ктродвигуна, яка установлює...
Частотно-регульований асинхроний електропривод
Номер патенту: 8583
Опубліковано: 30.09.1996
Автори: Бару Олександр Юріьович, Епштейн Ісаак Ізраільович
МПК: H02P 27/04
Мітки: електропривод, частотно-регульований, асинхроний
Формула / Реферат:
1. Частотно-регулируемый асинхронный электропривод, содержащий асинхронный двигатель с короткозамкнутым ротором, статорные обмотки которого подключены к преобразователю частоты, составленному из последовательно соединенных управляемого выпрямителя, дросселя и автономного инвертора тока, систему управления инвертором, снабженную двумя группами входов и подключенную выходами к входам управления автономного инвертора тока, датчики фазных...
Електропривід з частотно-струмовим керуванням
Номер патенту: 2945
Опубліковано: 26.12.1994
Автори: Ярославцев Михайло Іванович, Лукашенко Андрій Германович
МПК: H02P 27/04
Мітки: електропривід, частотно-струмовим, керуванням
Формула / Реферат:
Электропривод с частотно-токовым управлением, содержащий синхронный двигатель, фазовращатель, ротор которого механически соединен с ротором двигателя, цепь возбуждения фазовращателя подключена к выходу источника синусоидальных напряжений, последовательно соединенные фазовый детектор с управляющим первым и вторым опорными входами и регулируемый источник тока, выходы которого подключены к фазным обмоткам двигателя, формирователь коротких...
Електропривід з релейним керуванням
Номер патенту: 31224
Опубліковано: 15.12.2000
Автори: Савченко Сергій Борисович, Казачковський Микола Миколайович
МПК: H02P 7/06
Мітки: електропривід, керуванням, релейним
Текст:
...зг єднаний з виходом другого суматора, перший вхід якого підключений до виходу давача струму, другий вхід - до виходу давача напруги, третій вхід - до виходу третього блока диференціювання, п' ятнй вхід - до виходу задавача мінімальної напруги силового фільтра, вихід блока виділення модуля з' єднаний з входом третього блока диференціювання та з четвертям входом другого суматора, а ного вхід підключений до виходу третього суматора,...
Попередній патент: Сифон
Наступний патент: Пристрій стабілізації положення кросовера при проколі електронним пучком
Випадковий патент: Газовий котел "екотеп"