Система попередження наближення до земної поверхні
Номер патенту: 44644
Опубліковано: 12.10.2009
Автори: Козлов Анатолій Павлович, Калініченко Володимир Володимирович
Формула / Реферат
1. Система попередження наближення до земної поверхні, що являє собою комплекс інформаційних електроємностей, що складена з вимірювального мосту з високопотенціальними електродами, які електрично з'єднані між собою і розміщені на кінцевих поверхнях повітряного судна та низькопотенціального електрода, які складають ємнісний перетворювач врівноважувального конденсатора та системи автоматичного цифрового врівноважування, яка відрізняється тим, що ємнісний перетворювач системи містить чотири високопотенціальних електроди, що розміщені на передній, задній та бокових поверхнях корпусу гелікоптера, та один низькопотенціальний електрод, який поділено на чотири рівних за площею частини і розташовано на нижній поверхні фюзеляжу.
2. Система за п. 1, яка відрізняється тим, що для вимірювання інформаційних ємностей система містить чотириканальний вимірювальний міст, який складений з високочастотного генератора живлення мосту, що дає напругу на високопотенціальні електроди та на ланцюг формування опорної напруги живлення фазочутливих випрямлячів, чотирьох аналогових блоків перетворення корисних сигналів, кожен з яких містить підсилювач з високоомним вхідним опором, фазочутливий випрямляч, модулятор та врівноважувальний конденсатор, та відповідно чотирьох цифрових блоків, що мають цифро-аналоговий та аналого-цифровий перетворювачі, що з'єднані з мікропроцесором, який служить для лінеаризації вхідної інформації за введеною програмою та обчислення значень оцінок наближення у поздовжньому і бічному напрямах та значення геометричної висоти.
3. Система за п. 1, яка відрізняється тим, що усі чотири цифрових блоки разом з мікропроцесором входять до складу мікроконтролера, виходи якого з'єднані з індикатором попередження і системою автоматичного управління гелікоптером.
Текст
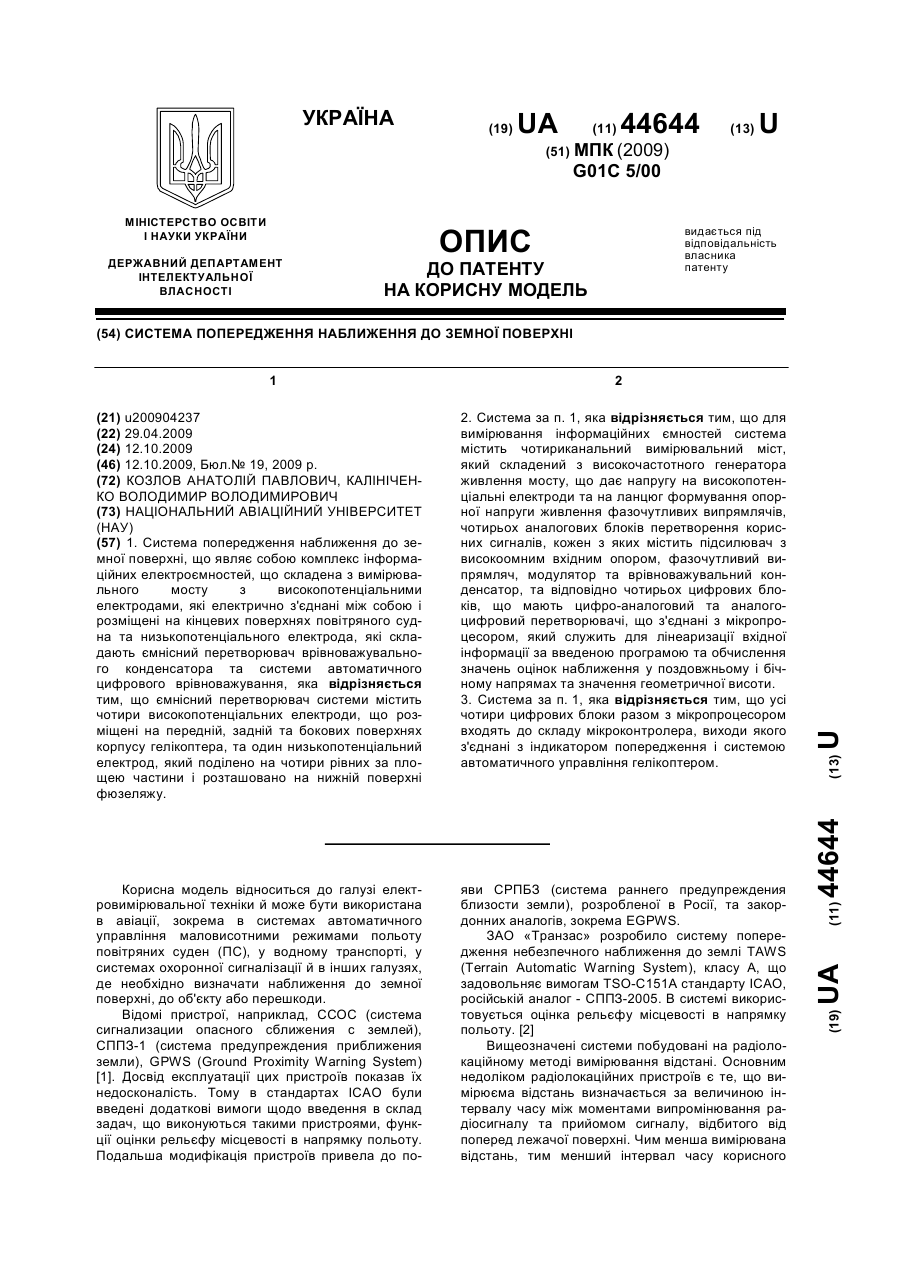
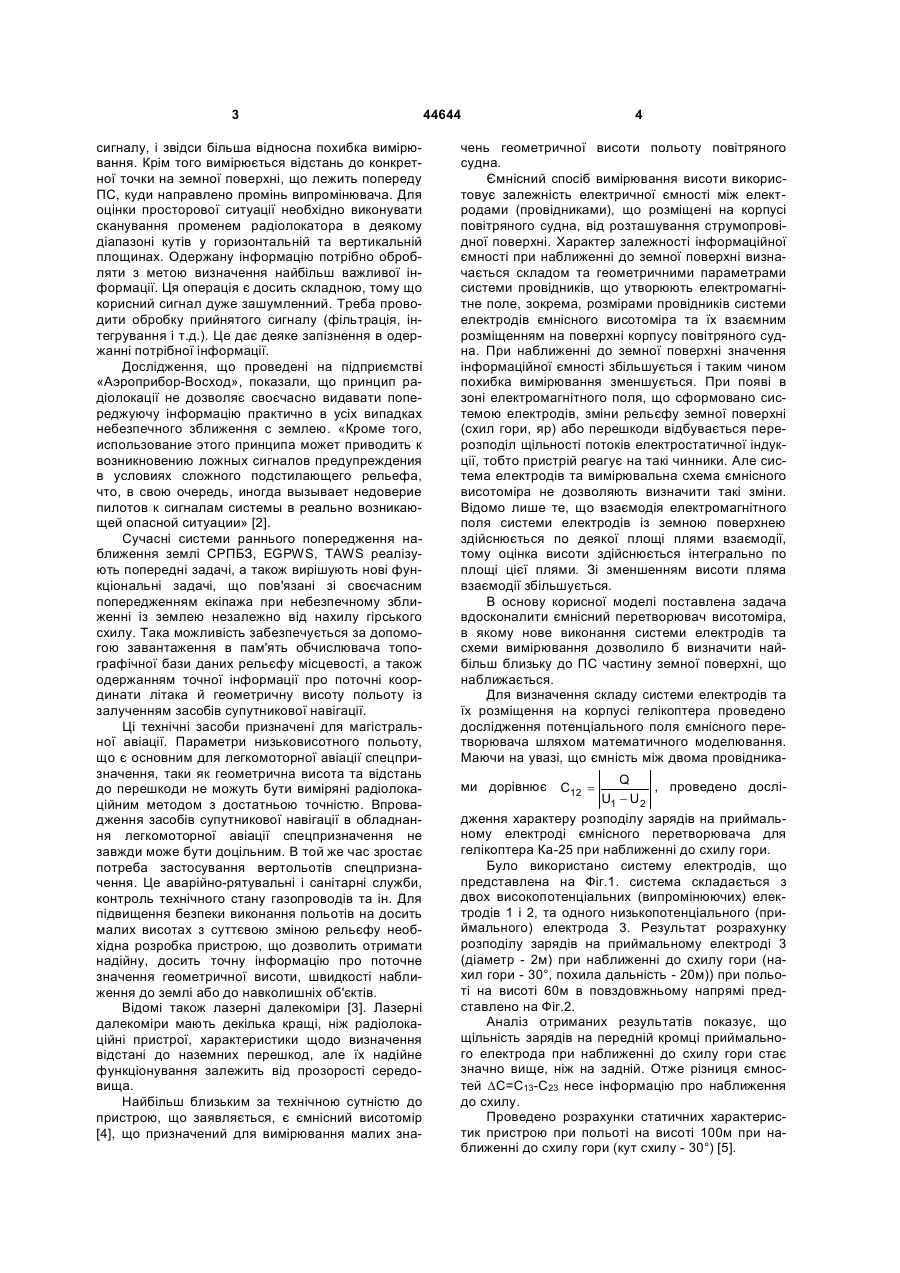
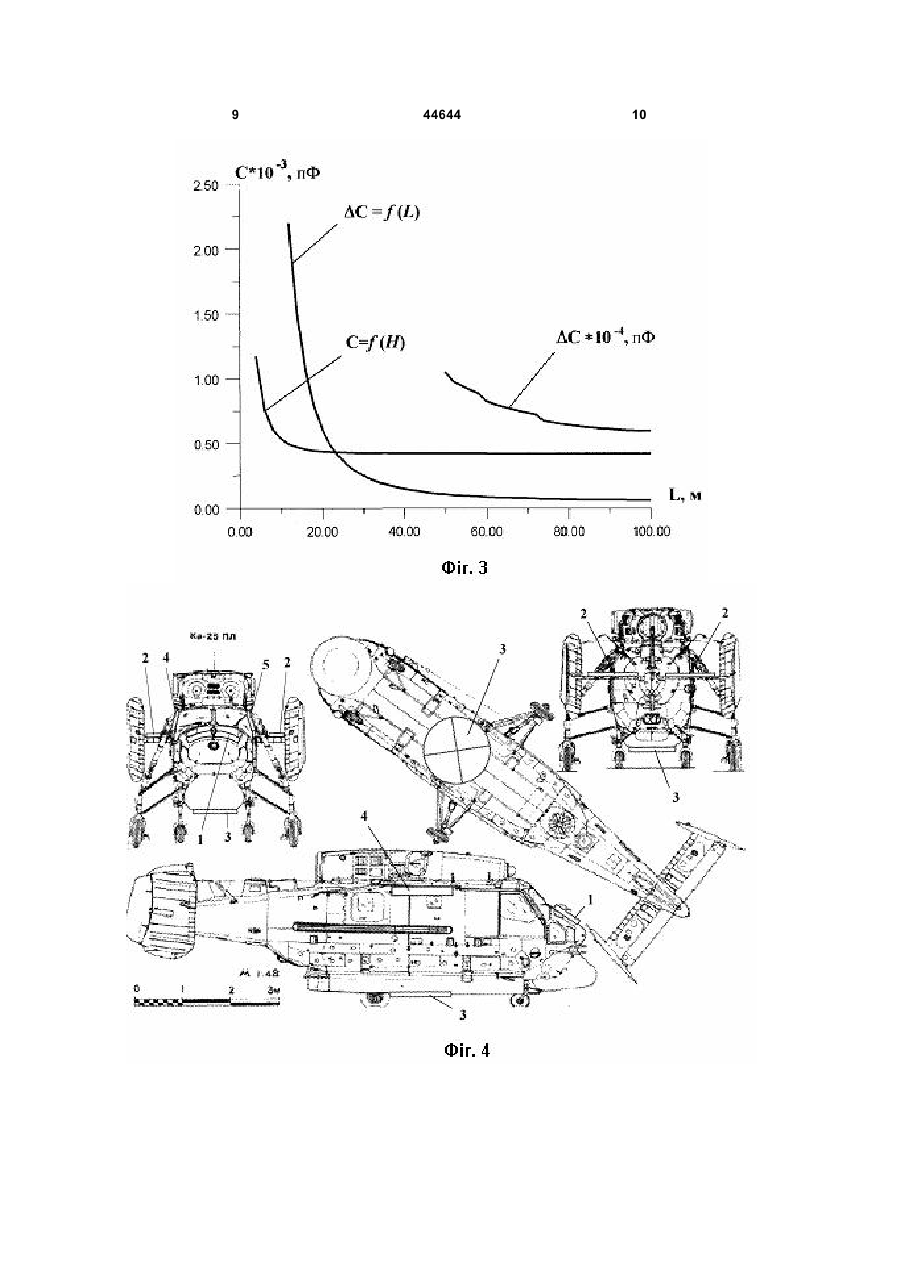
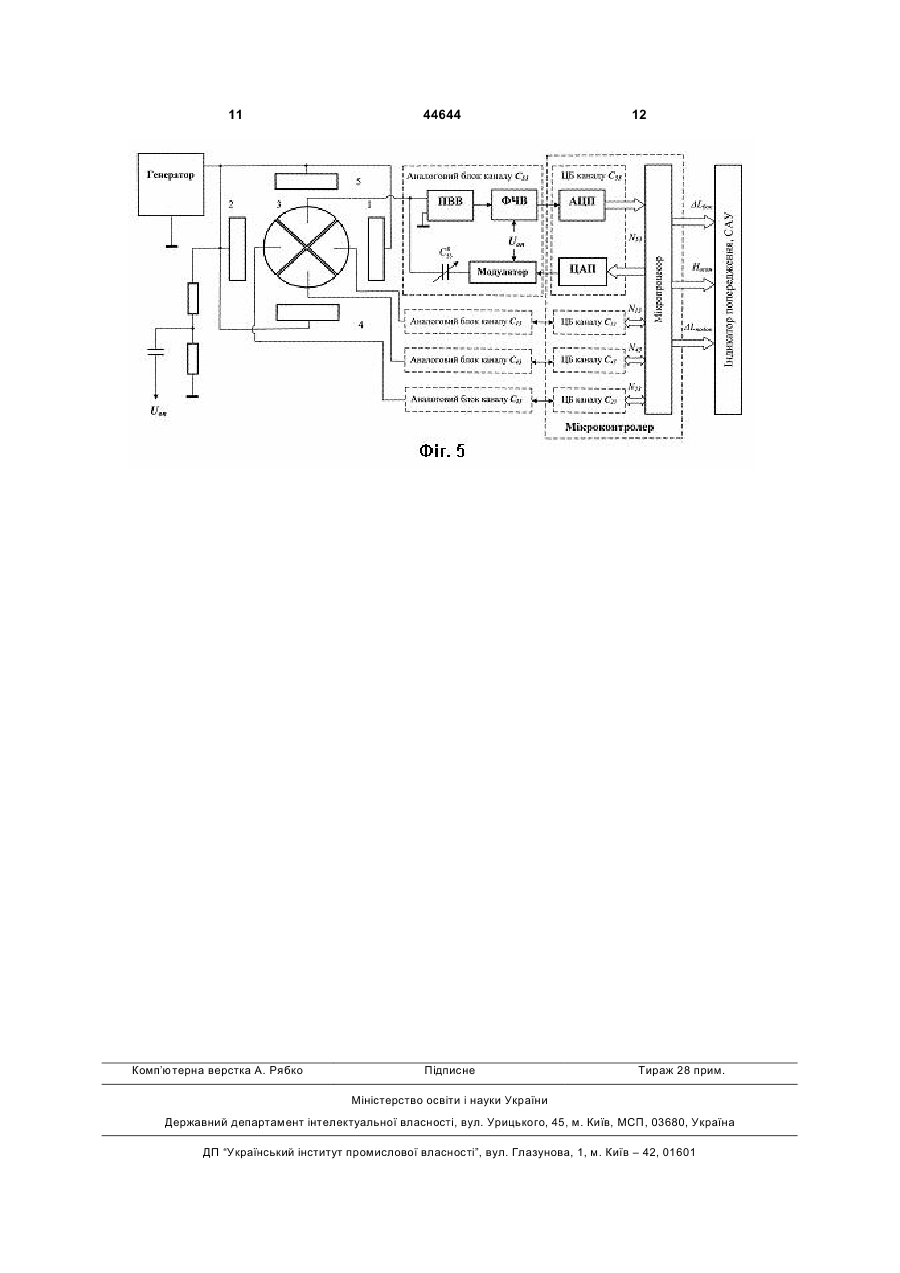
1. Система попередження наближення до земної поверхні, що являє собою комплекс інформаційних електроємностей, що складена з вимірювального мосту з високопотенціальними електродами, які електрично з'єднані між собою і розміщені на кінцевих поверхнях повітряного судна та низькопотенціального електрода, які складають ємнісний перетворювач врівноважувального конденсатора та системи автоматичного цифрового врівноважування, яка відрізняється тим, що ємнісний перетворювач системи містить чотири високопотенціальних електроди, що розміщені на передній, задній та бокових поверхнях корпусу гелікоптера, та один низькопотенціальний електрод, який поділено на чотири рівних за площею частини і розташовано на нижній поверхні фюзеляжу. U 2 (19) 1 3 сигналу, і звідси більша відносна похибка вимірювання. Крім того вимірюється відстань до конкретної точки на земної поверхні, що лежить попереду ПС, куди направлено промінь випромінювача. Для оцінки просторової ситуації необхідно виконувати сканування променем радіолокатора в деякому діапазоні кутів у горизонтальній та вертикальній площинах. Одержану інформацію потрібно обробляти з метою визначення найбільш важливої інформації. Ця операція є досить складною, тому що корисний сигнал дуже зашумленний. Треба проводити обробку прийнятого сигналу (фільтрація, інтегрування і т.д.). Це дає деяке запізнення в одержанні потрібної інформації. Дослідження, що проведені на підприємстві «Аэроприбор-Восход», показали, що принцип радіолокації не дозволяє своєчасно видавати попереджуючу інформацію практично в усіх випадках небезпечного зближення с землею. «Кроме того, использование этого принципа может приводить к возникновению ложных сигналов предупреждения в условиях сложного подстилающего рельефа, что, в свою очередь, иногда вызывает недоверие пилотов к сигналам системы в реально возникающей опасной ситуации» [2]. Сучасні системи раннього попередження наближення землі СРПБЗ, EGPWS, TAWS реалізують попередні задачі, а також вирішують нові функціональні задачі, що пов'язані зі своєчасним попередженням екіпажа при небезпечному зближенні із землею незалежно від нахилу гірського схилу. Така можливість забезпечується за допомогою завантаження в пам'ять обчислювача топографічної бази даних рельєфу місцевості, а також одержанням точної інформації про поточні координати літака й геометричну висоту польоту із залученням засобів супутникової навігації. Ці технічні засоби призначені для магістральної авіації. Параметри низьковисотного польоту, що є основним для легкомоторної авіації спецпризначення, таки як геометрична висота та відстань до перешкоди не можуть бути виміряні радіолокаційним методом з достатньою точністю. Впровадження засобів супутникової навігації в обладнання легкомоторної авіації спецпризначення не завжди може бути доцільним. В той же час зростає потреба застосування вертольотів спецпризначення. Це аварійно-рятувальні і санітарні служби, контроль технічного стану газопроводів та ін. Для підвищення безпеки виконання польотів на досить малих висотах з суттєвою зміною рельєфу необхідна розробка пристрою, що дозволить отримати надійну, досить точну інформацію про поточне значення геометричної висоти, швидкості наближення до землі або до навколишніх об'єктів. Відомі також лазерні далекоміри [3]. Лазерні далекоміри мають декілька кращі, ніж радіолокаційні пристрої, характеристики щодо визначення відстані до наземних перешкод, але їх надійне функціонування залежить від прозорості середовища. Найбільш близьким за технічною сутністю до пристрою, що заявляється, є ємнісний висотомір [4], що призначений для вимірювання малих зна 44644 4 чень геометричної висоти польоту повітряного судна. Ємнісний спосіб вимірювання висоти використовує залежність електричної ємності між електродами (провідниками), що розміщені на корпусі повітряного судна, від розташування струмопровідної поверхні. Характер залежності інформаційної ємності при наближенні до земної поверхні визначається складом та геометричними параметрами системи провідників, що утворюють електромагнітне поле, зокрема, розмірами провідників системи електродів ємнісного висотоміра та їх взаємним розміщенням на поверхні корпусу повітряного судна. При наближенні до земної поверхні значення інформаційної ємності збільшується і таким чином похибка вимірювання зменшується. При появі в зоні електромагнітного поля, що сформовано системою електродів, зміни рельєфу земної поверхні (схил гори, яр) або перешкоди відбувається перерозподіл щільності потоків електростатичної індукції, тобто пристрій реагує на такі чинники. Але система електродів та вимірювальна схема ємнісного висотоміра не дозволяють визначити такі зміни. Відомо лише те, що взаємодія електромагнітного поля системи електродів із земною поверхнею здійснюється по деякої площі плями взаємодії, тому оцінка висоти здійснюється інтегрально по площі цієї плями. Зі зменшенням висоти пляма взаємодії збільшується. В основу корисної моделі поставлена задача вдосконалити ємнісний перетворювач висотоміра, в якому нове виконання системи електродів та схеми вимірювання дозволило б визначити найбільш близьку до ПС частину земної поверхні, що наближається. Для визначення складу системи електродів та їх розміщення на корпусі гелікоптера проведено дослідження потенціального поля ємнісного перетворювача шляхом математичного моделювання. Маючи на увазі, що ємність між двома провідникаQ , проведено досліU1 - U2 дження характеру розподілу зарядів на приймальному електроді ємнісного перетворювача для гелікоптера Ка-25 при наближенні до схилу гори. Було використано систему електродів, що представлена на Фіг.1. система складається з двох високопотенціальних (випромінюючих) електродів 1 і 2, та одного низькопотенціального (приймального) електрода 3. Результат розрахунку розподілу зарядів на приймальному електроді 3 (діаметр - 2м) при наближенні до схилу гори (нахил гори - 30°, похила дальність - 20м)) при польоті на висоті 60м в повздовжньому напрямі представлено на Фіг.2. Аналіз отриманих результатів показує, що щільність зарядів на передній кромці приймального електрода при наближенні до схилу гори стає значно вище, ніж на задній. Отже різниця ємностей DС= С13-С23 несе інформацію про наближення до схилу. Проведено розрахунки статичних характеристик пристрою при польоті на висоті 100м при наближенні до схилу гори (кут схилу - 30°) [5]. ми дорівнює C12 = 5 На Фіг.3. представлено графіки змін інформаційних ємностей в залежності від похилої дальності L: С = 13+С23 - зміна сумарної міжелектродної С ємності і DС= С13-С23 - зміна різницевої міжелектродної ємності. Для наочності на цьому же графіку представлена частина кривої DС у діапазоні похилої дальності 50...100м, що збільшена в 10 разів. Аналіз наведеного показує, що величина ємності С у силу сталості висоти при наближенні схилу практично не міняється, лише різко зростає на дистанціях менш 10м, і таким чином несе інформацію про геометричну висоту польоту. Крива різницевої ємності змінюється практично на всьому діапазоні дистанцій і має зростаючий характер асиметрії ємностей С13 і C23 при наближення до схилу. Порядок величин різницевої ємності досить малий, однак допускає реалізацію практичних вимірювань. Можна припустити, що при поперечному розташуванні системи електродів буде отримана інформація про наближення до схилу гори з боку. Поставлена задача вирішується тим, що ємнісний перетворювач системи містить чотири високопотенціальних електрода 1, 2, 4, 5, які електричне з'єднані між собою і розміщені на передній, задній та бокових поверхнях корпусу гелікоптера, та одного низкопотенціального електрода 3, який поділено на 4 рівних за площею частини і розташовано на нижній поверхні фюзеляжу. На Фіг.4 представлено систему електродів, що розміщена на корпусі гелікоптера Ка-25. Ємності С13, C23, C43, C53 складають систему інформаційних ємностей. Різницева ємність DСп=С13-С23 несе інформацію про наближення до схилу гори чи перешкоди попереду, DСб= С43-С53 про наближення до схилу гори чи перешкоди з боку. Їх сума несе інформацію про геометричну висоту. Вимірювання інформаційних ємностей здійснюється компенсаційно-мостовою схемою з автоматичним цифровим врівноважуванням. Вимірювальний чотириканальний міст (див. Фіг.5.) складається з високочастотного генератора живлення мосту, який дає напругу на високопотенціальні електроди 1, 2, 4, 5 та у ланцюг формування опорної напруги живлення фазочутливих випрямлячів Uoп, чотирьох аналогових блоків перетворення корисних сигналів від С13, С23, С43, С53, кожен з яких складається з підсилювача з високоомним вхідним опором ПВВ, фазочутливого 44644 6 випрямляча ФЧВ, модулятора та врівноважуючого конденсатора С°, та відповідно чотирьох цифрових блоків ЦБ, що мають аналогово-цифровий (АЦП) та цифро-аналоговий (ЦАП) перетворювачі. З АЦП сигнал поступає в мікропроцесор, де він оброблюється і подається на ЦАП. Усі 4 цифрових блоки разом з мікропроцесором входять до складу мікроконтроллера, наприклад C8051F005. Мікропроцесор за введеною програмою лінеаризує вхідну інформацію і обчислює значення оцінок наближення DL подов = f ( DC п ), DL бок = f ( DC бок ) та Hгеом = f (C13 + C 23 + C 43 + C 53 ) . Ця інформація подається на індикатор попередження і може бути використана в САУ гелікоптера. Система працює таким чином. Вимірювальна мостова схема кожного каналу за допомогою врівноважуючого конденсатора С° балансується на нульовій висоті, тобто на стоянці гелікоптера при відсутності впливу сторонніх об'єктів. При зльоті гелікоптера висота змінюється, ємності між електродами зменшуються, - міст кожного каналу розбалансовується. Після автоматичного врівноважування мосту кожного каналу в мікропроцесорі з'являється та запам'ятовується цифровий код, значення якого пропорційне приросту інформаційної ємності, а звідси сума цих значень відповідає виміряної висоти. Різницеві ємності при відсутності змін рельєфу будуть дорівнювати нулеві. При появі схилу гори чи яру в одному з каналів чи в обох з'явиться сигнал попередження. Джерела інформації: 1. Буров Н.И., Маловысотная радиолокация. М. транспорт 1980. 2. Матеріали виставки «Фарнборо-2006, ОАО «Аэроприбор-Восход», Информационное агентство «АРМС-ТАСС». 3. Федоров Б.Ф. Лазерные приборы и системы летательных аппаратов. М., Машиностроение. 1979. 272с. 4. Козлов А.П., Рогожин В.О., Синєглазов В.М., Філяшкін М.К. Ємнісний висотомір. Деклараційний патент на корисну модель №8415, 2005, Україна. 5. Козлов А.П. Системы управления маловысотным полетом воздушных судов с емкостными преобразователями. Дисс. на соиск. уч. ст. к.т.н., 2002. 7 44644 8 9 44644 10 11 Комп’ютерна верстка А. Рябко 44644 Підписне 12 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for prevention of approach to surface of earth
Автори англійськоюKozlov Anatolii Pavlovych, Kalinichanko Volodymyr Volodymyrovych
Назва патенту російськоюСистема предупреждения приближения к земной поверхности
Автори російськоюКозлов Анатолий Павлович, Калиниченко Владимир Владимирович
МПК / Мітки
МПК: G01C 5/00
Мітки: наближення, система, поверхні, земної, попередження
Код посилання
<a href="https://ua.patents.su/6-44644-sistema-poperedzhennya-nablizhennya-do-zemno-poverkhni.html" target="_blank" rel="follow" title="База патентів України">Система попередження наближення до земної поверхні</a>
Пристрій для раннього попередження наближення землі
Номер патенту: 25341
Опубліковано: 10.08.2007
Автори: Алмазов Леонід Олександрович, Дроздов Олександр Олексійович, Білецький Олександр Кіндратович, Іванова Катерина Геннадіївна
МПК: G08G 5/00
Мітки: попередження, землі, наближення, пристрій, раннього
Формула / Реферат:
1. Пристрій для раннього попередження наближення землі, який містить базу даних рельєфу земної поверхні, аеродромів і штучних перешкод, вхід якої з'єднаний з виходом блока заповнення і оновлення бази даних, а вихід з'єднаний з першим входом блока обробки інформації, другий вхід блока обробки інформації підключений до виходу блока приймання інформації про параметри польоту, блок адаптації до типу літального апарата, вихід якого приєднаний до...
Спосіб дистанційного моніторингу земної поверхні та інтегрована система для його реалізації
Номер патенту: 70868
Опубліковано: 15.10.2004
Автори: Смеркло Любомир Михайлович, Прудиус Іван Никифорович, Зубков Анатолій Миколайович
МПК: G01J 11/00, G01S 13/00
Мітки: дистанційного, реалізації, система, поверхні, моніторингу, інтегрована, земної, спосіб
Формула / Реферат:
1. Спосіб дистанційного моніторингу земної поверхні, згідно з яким аналізують тепловий взаємоконтраст наземних об'єктів і фону при скануванні заданої області спостереження в інфрачервоному діапазоні шляхом механічного переміщення плоского дзеркала, розміщеного в паралельному пучку променів, сформованому параболічним фокусуючим дзеркалом, фокусують і приймають теплове випромінювання, який відрізняється тим, що одночасно зі скануванням в...
Спосіб захисту від провалу земної поверхні
Номер патенту: 49575
Опубліковано: 16.09.2002
Автори: Кренида Юрій Федорович, Гавриленко Юрій Миколайович, Єрмаков Віктор Миколайович
МПК: E21F 15/00, E02D 3/12
Мітки: захисту, земної, провалу, поверхні, спосіб
Формула / Реферат:
Спосіб захисту від провалів земної поверхні, який включає буріння свердловин з поверхні, оснащення точок реєстрації провалів шарів гірських порід, подачу сигналу про чергове обвалення гірських порід, прийняття рішення про заходи запобігання провалів на земній поверхні, який відрізняється тим, що встановлюють місце порожнини провалів і місця точок реєстрації чергових провалів.
Спосіб визначення можливих просторових зміщень земної поверхні вугільних шахт
Номер патенту: 11537
Опубліковано: 15.12.2005
Автори: Гавриленко Юрій Миколайович, Анциферов Андрій Вадимович, Кисельов Микола Миколайович, Філатов Валерій Федорович
МПК: E02D 31/00
Мітки: можливих, спосіб, поверхні, шахт, вугільних, просторових, визначення, земної, зміщень
Формула / Реферат:
1. Спосіб визначення можливих просторових зміщень земної поверхні вугільних шахт, що включає закладання ліній ґрунтових реперів, який відрізняється тим, що включає аналіз вихідних даних умов відпрацювання вугільного родовища і даних раніше проведених спостережень за осіданням земної поверхні досліджуваної і сусідніх шахт і підготовку растрової основи планів гірничих робіт згідно з етапами: перший етап - сканування за допомогою скандувального...
Спосіб визначення вертикальних деформацій земної поверхні
Номер патенту: 37852
Опубліковано: 10.12.2008
Автор: Светницький Сергій Олексійович
МПК: G01C 5/00
Мітки: визначення, земної, спосіб, деформацій, поверхні, вертикальних
Формула / Реферат:
Спосіб визначення вертикальних деформацій земної поверхні, який включає використання диференціальної залежності, що зв'язує горизонтальні і вертикальні деформації земної поверхні, який відрізняється тим, що систематично виміряють довжини інтервалів між ґрунтовими реперами, визначають горизонтальні деформації з урахуванням початкової і кожної подальшої серії спостережень і визначають вертикальні деформації на основі заміряних горизонтальних...
Попередній патент: Спосіб отримання рельєфних зносостійких азотованих шарів стальних деталей
Наступний патент: Універсальний апарат самообслуговування для поповнення рахунків клієнтів
Випадковий патент: Осьовий вентилятор з протизривним пристроєм