Пристрій для раннього попередження наближення землі
Номер патенту: 25341
Опубліковано: 10.08.2007
Автори: Дроздов Олександр Олексійович, Алмазов Леонід Олександрович, Іванова Катерина Геннадіївна, Білецький Олександр Кіндратович


Формула / Реферат
1. Пристрій для раннього попередження наближення землі, який містить базу даних рельєфу земної поверхні, аеродромів і штучних перешкод, вхід якої з'єднаний з виходом блока заповнення і оновлення бази даних, а вихід з'єднаний з першим входом блока обробки інформації, другий вхід блока обробки інформації підключений до виходу блока приймання інформації про параметри польоту, блок адаптації до типу літального апарата, вихід якого приєднаний до одного із входів блока приймання інформації про параметри польоту, інші входи якого підключені до зовнішніх датчиків визначення динамічних параметрів польоту, блок обробки інформації, що включає робочий оперативний запам'ятовуючий пристрій (ОЗП) для збереження просторового тривимірного зображення рельєфу (локальної карти), вхід якого утворює перший вхід блока обробки інформації, а вихід з'єднаний з першими входами: обчислювача законів попередження в залежності від типу літального апарата, обчислювача законів обльоту і формувача відеоінформації, другий вхід якого з'єднаний з виходом обчислювача законів обльоту, а вихід утворює перший вихід блока обробки інформації, причому вихід обчислювача законів попередження в залежності від типу літального апарата з'єднаний з другим входом обчислювача законів обльоту, третій вхід обчислювача законів обльоту підключений до першого виходу аналізатора положення (миттєвого та майбутнього), а другий вхід з'єднаний з першим входом аналізатора положення, другий вихід якого з'єднаний із входом формувача голосових і світлових попереджень, причому виходи формувача голосових і світлових попереджень утворюють другий і третій виходи блока обробки інформації, які відповідно підключені до зовнішніх звукових гучномовців, світлосигналізаторів та багатофункціональних індикаторів, який відрізняється тим, що він містить обчислювач етапу польоту, вхід якого з'єднаний з другим входом обчислювача законів попередження в залежності від типу літального апарата і сумісно з яким утворює другий вхід блока обробки інформації, а вихід з'єднаний із входом обчислювача законів попередження в залежності від етапу польоту, вихід якого підключений до додаткових входів аналізатора положення і обчислювача законів обльоту.
2. Пристрій для раннього попередження наближення землі за п. 1, який відрізняється тим, що формувач відеоінформації виконаний з можливістю формування і видачі графічної інформації у форматі, що відповідає умовам блока візуалізації, які задані у блоці адаптації до типу літального апарата.
3. Пристрій для раннього попередження наближення землі за п. 1, який відрізняється тим, що формувач відеоінформації виконаний з можливістю проводити формування графічної інформації з орієнтацією щодо магнітного курсу або шляхового кута, в залежності від інформації про стан органів керування, що одержана від індикатора.
4. Пристрій для раннього попередження наближення землі за п. 1, який відрізняється тим, що формувач відеоінформації виконаний з можливістю формування графічної інформації в одному з двох режимів: у режимі відносних висот, якщо робоча зона має хоч би один елемент підстильної поверхні, над яким перевищення висоти польоту літального апарата становить менш ніж 600 м, або у режимі абсолютних висот.
5. Пристрій для раннього попередження наближення землі за п. 1, який відрізняється тим, що формувач мовних і світлових попереджень виконаний з можливістю видачі мовних сповіщень однією з двох мов - російською або англійською, в залежності від стану відповідного дискретного сигналу в блоці адаптації до типу літального апарата.
6. Пристрій для раннього попередження наближення землі за п. 1, який відрізняється тим, що блок приймання інформації про параметри польоту виконаний з можливістю приймати необхідну інформацію від зовнішніх датчиків в аналоговому вигляді у формі сигналів з потенціометричних датчиків, сигналів зі щіток, сигналів у форматі синусно-косинусних трансформаторів (СКТ), сигналів у вигляді постійної напруги або в цифровому вигляді згідно з ARINC 429 з частотою 12,5 кбіт/с або 100 кбіт/с, причому тип сигналу, що приймається (один з аналогових або цифровий), заданий у блоці адаптації до типу літального апарата.
Текст
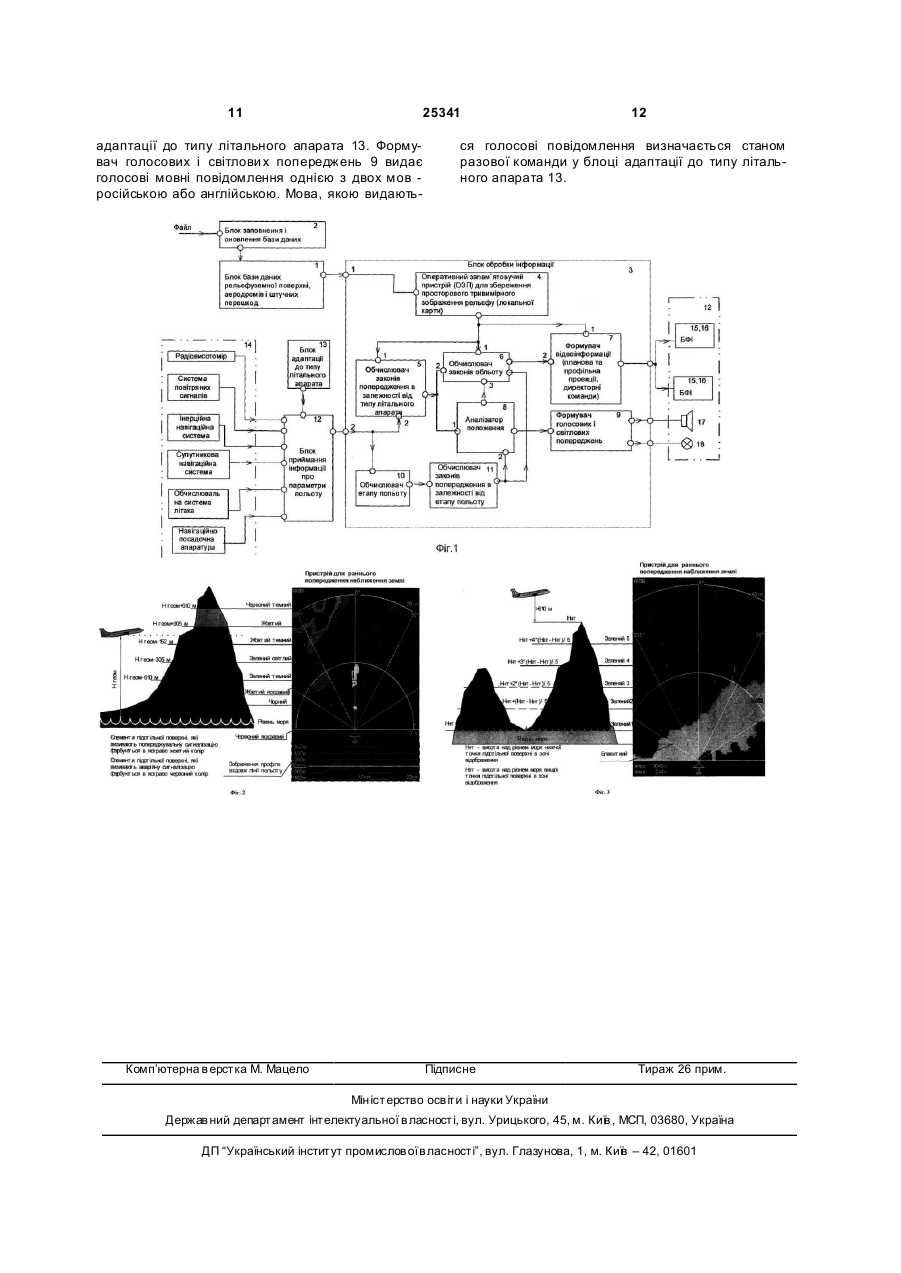
1. Пристрій для раннього попередження наближення землі, який містить базу даних рельєфу земної поверхні, аеродромів і штучни х перешкод, вхід якої з'єднаний з виходом блока заповнення і оновлення бази даних, а вихід з'єднаний з першим входом блока обробки інформації, другий вхід блока обробки інформації підключений до виходу блока приймання інформації про параметри польоту, блок адаптації до типу літального апарата, ви хід якого приєднаний до одного із входів блока приймання інформації про параметри польоту, інші входи якого підключені до зовнішніх датчиків визначення динамічних параметрів польоту, блок обробки інформації, що включає робочий оперативний запам'ятовуючий пристрій (ОЗП) для збереження просторового тривимірного зображення рельєфу (локальної карти), вхід якого утворює перший вхід блока обробки інформації, а вихід з'єднаний з першими входами: обчислювача законів попередження в залежності від типу літального апарата, обчислювача законів обльоту і формувача відеоінформації, другий вхід якого з'єднаний з виходом обчислювача законів обльоту, а вихід утворює перший вихід блока обробки інформації, причому вихід обчислювача законів попередження в залежності від типу літального апарата з'єднаний з другим входом обчислювача законів обльоту, третій вхід обчислювача законів обльоту підключений до першого виходу аналізатора положення (миттєвого та майбутнього), а другий вхід з'єднаний з першим входом аналізатора положення, другий вихід якого з'єднаний із входом формувача голосових і світлових попереджень, причому виходи формувача голосових і світлових попереджень утворюють другий і третій виходи блока обробки інформації, які відповідно підключені до зовнішніх звукових гучномовців, світлосигналізаторів та багатофункціональних інди 2 (19) 1 3 25341 4 вигляді постійної напруги або в цифровому вигляді згідно з ARINC 429 з частотою 12,5 кбіт/с або 100 кбіт/с, причому тип сигналу, що приймається (один з аналогових або цифровий), заданий у блоці адаптації до типу літального апарата. Корисна модель відноситься до систем керування рухом повітряного транспорту, зокрема до способу раннього попередження льотного екіпажу про небезпечну близькість земної або водної поверхні, а також штучни х перешкод і може бути використана на всіх типах літальних апаратів для підвищення безпеки польотів. Відомий пристрій попередження зіткнення з землею, що містить блок вертикального обльоту, входи якого приєднані до виходів бази даних рельєфу, модуля адаптації до типу літального апарата, блока інформаційних датчиків і поста управління, причому перший вихід блока вертикального обльоту приєднаний до входу блока попереджувальних сигналів, а його третій вихід з'єднаний із входом відображення. Крім цього, до схеми введені локальна карта бокового маневру, обмежувач локальної карти і блок напрямку розвороту. Перший вхід локальної карти бокового маневру з'єднаний з виходом бази даних рельєфу, її др угий вхід з'єднаний з додатковим виходом блока вертикального обльоту. Вихід локальної карти бокового маневру приєднаний до першого входу блока напрямку розвороту і до першого входу обмежувача локальної карти, вихід якого з'єднаний із додатковим входом блока вертикального обльоту. Вхід блока напрямку розвороту приєднаний до другого виходу блока вертикального обльоту. Ви хід блока напрямку розвороту приєднаний до додаткового входу блока попереджувальних сигналів і до другого входу обмежувача локальної карти [Патент RU №2271039 МПК G08G5/04]. З відомих пристроїв для раннього попередження наближення землі найбільш близьким за технічною суттю до корисної моделі є пристрій для запобігання зіткнення з землею літального апарата, який містить вхідний блок для прийому інформації, що характеризує просторове положення і динамічний стан літального апарата, робочий запам'ятовуючий пристрій для збереження тривимірного зображення рельєфу поверхні (підстильна поверхня), над якою пролітає літальний апарат, блок обробки інформації, що призначений для визначення, в залежності від типу і положення літального апарата, сектора огляду відносно цього літального апарата і розрахунку контуру рельєфу місцевості в цьому секторі як функції перетинання цього рельєфу з рельєфом підстильної поверхні; блок, що забезпечує можливість візуалізалізації контура підстильної поверхні [Патент RU №2211489, 7 МПК G08G5/00]. Недоліком відомих пристроїв раннього попередження наближення землі є короткий проміжок часу для прогнозу визначення небезпечної ситуації, який в більшості складає не більш ніж 120сек. для формування попереджувальної сигналізації і не більше 90сек. для формування аварійної сиг налізації. Такі параметри формування сигналізації в умовах польоту літального апарата нижче рівня гір залишають пілоту малий запас часу для ліквідації небезпечних ситуацій. В зв'язку з порівняно малою глибиною простору, що проглядається вперед, може статися ситуація, коли високі ділянки рельєфу спереду по курсу літального апарата (наприклад, гірське пасмо) виявляються системою попередження зіткнення на такій малій відстані, що швидкості підйому літального апарата може не вистачить для вертикального маневру. В цьому випадку можлива ситуація, коли реалізація горизонтального маневру (відхилення від зіткнення) не може бути здійснена за браком часу і відповідних технічних параметрів літального апарата. У відомих рішеннях обмежена глибина ділянки, що проглядається (область сканування), вона обумовлена необхідністю мінімізації імовірності видачі хибної сигналізації при польотах в зоні зі складним рельєфом місцевості, наприклад, в зоні гірських аеродромів. В процесі маневрування при заході на посадку на такий аеродром або при зльоті з нього цілком може скластися ситуація, коли продовження траєкторії польоту літального апарата на якійсь ділянці буде "спиратися" в розташовані поблизу гори. В цьому випадку уникнути видачі хибної сигналізації можна тільки шляхом обмеження щодо дальності зон попередження. Вочевидь, що обмеження щодо дальності зон сигналізації в існуючих системах сталося результатом компромісу між прагненням вчасно попередити пілота про виникнення небезпечної ситуації і бажанням одночасно з цим знизити імовірність видачі хибної сигналізації при контрольованих польотах в районі гірських аеродромів. В основу корисної моделі поставлена задача удосконалення пристрою для раннього попередження наближення землі шляхом модифікації його конструкції, що за рахунок розширення робочої зони (глибини) проглядаємого вперед простору на етапі крейсерського польоту (політ за маршрутом) і обмеження робочої зони поблизу аеродрому, забезпечує підвищення надійності попередження зіткнення літального апарата з підстильною поверхнею або штучною перешкодою. Поставлена задача вирішується тим, що пристрій для раннього попередження наближення землі, який містить базу даних рельєфу земної поверхні, аеродромів і штучних перешкод, вхід якої з'єднаний з виходом блока заповнення і оновлення інформації, а вихід з'єднаний з першим входом блока обробки інформації, другий вхід блока обробки інформації підключений до виходу блока приймання інформації про параметри польоту, блок адаптації до типу літального апарата, вихід якого приєднаний до одного із входів блока при 5 25341 ймання інформації про параметри польоту, інші його входи підключені до зовнішніх датчиків визначення динамічних параметрів польоту, блок обробки інформації, що включає оперативний запам'ятовуючий пристрій (ОЗП) для збереження просторового тривимірного зображення рельєфу (локальної карти), вхід якого утворює перший вхід блока обробки інформації, а вихід з'єднаний з першими входами: обчислювача законів попередження в залежності від типу літального апарата, обчислювача законів обльоту і формувача відеоінформації, вихід якого утворює перший вихід блока обробки інформації підключений до зовнішніх багатофункціональних індикаторів, причому ви хід обчислювача законів попередження в залежності від типу літального апарата з'єднаний з другим входом обчислювача законів обльоту, третій вхід обчислювача законів обльоту підключений до першого виходу аналізатора положення (миттєвого та майбутнього), а другий вихід якого з'єднаний із входом формувача голосових і світлови х попереджень, причому виходи формувача голосових і світлових попереджень утворюють другий і третій виходи блока обробки інформації, які відповідно підключені до звукових гучномовців і до світлосигналізаторів, згідно з корисною моделлю, він містить обчислювач етапу польоту, вхід якого з'єднаний з другим входом обчислювача законів попередження в залежності від типу літального апарата, утворюючи сумісно другий вхід блока обробки інформації, а вихід обчислювача етапу польоту з'єднаний із входом обчислювача законів попередження в залежності від етапу польоту, вихід якого підключений до додаткових входів аналізатора положення і обчислювача законів обльоту, формувач відеоінформації виконаний з можливістю формування і видачі графічної інформації у форматі, відповідно до умов блока візуалізації, які задані у блоці адаптації до типу літального апарата, з можливістю проводити формування графічної інформації з орієнтацією щодо магнітного курсу або шляхового кута , в залежності від інформації про стан органів управління, що одержана від індикатора, а також з можливістю формування графічної інформації в одному з двох режимів: у режимі відносних висот, якщо робоча зона має хоч би один елемент підстильної поверхні, над яким перевищення висоти польоту літального апарата менш ніж 600м, або у режимі абсолютних висот, блок приймання інформації про параметри польоту виконаний з можливістю приймати необхідну інформацію від зовнішніх датчиків в аналоговому вигляді у формі сигналів з потенціометричних датчиків, сигналів зі щіток, сигналів у форматі синусно - косинусних трансформаторів (СКТ), сигналів у вигляді постійної напруги або в цифровому вигляді згідно з ARJNC 429 з частотою 12,5кбіт/с або 100кбіт/с, причому тип сигналу, що приймається (один з аналогових або цифровий), заданий у блоці адаптації до типу літального апарата, а формувач голосових і світлови х попереджень виконаний з можливістю видачі голосових повідомлень однією з двох мов російською або англійською, залежно від стану дискретного сигналу в блоці адаптації до типу літального апарата. 6 Введення до пристрою обчислювача етапу польоту, вхід якого сумісно з другим входом обчислювача законів попередження в залежності від типу літального апарата утворюють другий вхід блока обробки інформації, а вихід обчислювача етапу польоту з'єднаний із входом обчислювача законів попередження в залежності від етапу польоту дозволяє здійснити динамічне змінення глибини робочої зони проглядаємого вперед простору, яка визначається як добуток шляхової швидкості на час спрацьовування попереджувальної сигналізації. В залежності від етапу польоту, який визначається обчислювачем етапу польоту, змінюється глибина робочого простору для формування попереджувальної і аварійної сигналізації. Так, наприклад, на етапі крейсерського польоту (польоту за маршрутом) глибина робочого простору для формування попереджувальної сигналізації не обмежена, а глибина робочого простору для формування аварійної сигналізації обмежена часом польоту, що дорівнює 120сек. На етапі польоту в зоні 1 аеродрому, що характеризується відстанню до торця найближчої злітної посадочної смуги (ЗПС) менше 15 морських міль і висотою над торцем ЗПС менше 3500 футів, глибина робочого простору для формування попереджувальної аварійної сигналізації обмежена часом польоту, що дорівнює 60сек. і 50сек. відповідно. На етапі польоту в зоні 2 аеродрому, що характеризується відстанню до торця найближчої ЗПС менше 30 морських міль і висотою над торцем ЗПС менше 5900 футів, глибина робочого простору для формування попереджувальної аварійної сигналізації обмежена часом польоту, що дорівнює 120сек. і 100сек. відповідно. Якщо літальний апарат виконує розворот і радіус розвороту менше дальності спрацьовування попереджувальної сигналізації, яка визначається в залежності від відстані до найближчої ЗПС, то дальність спрацьовування попереджувальної сигналізації зменшується до величини радіуса розвороту. Таким чином, розширення робочої зони (глибини) проглядаємого вперед простору на етапі крейсерського польоту (політ за маршрутом) і обмеження робочої зони поблизу аеродрому забезпечує з однієї сторони достатню дальність знаходження небезпечного зближення з землею (на етапі крейсерського польоту глибина робочої зони для формування попереджувальної сигналізації не обмежена), а з другої сторони виключає хибні спрацьовування сигналізації при злітно - посадочних маневрах в районах гірських аеродромів, таким чином забезпечується підвищення надійності попередження зіткнення літального апарата з підстильною поверхнею або штучною перешкодою і підвищується безпечність польотів в районах зі складним рельєфом. Наступною відрізняльною ознакою пристрою, що заявляється є те, що формувач відеоінформації виконаний з можливістю формування і видачі графічної інформації у форматі, відповідно до умов блока візуалізації, які задані у блоці адаптації до типу літального апарата. На різних типах літальних апаратів встановлені різні прилади для візуалізації графічної інформації, які відрізняються 7 25341 один від одного розмірами екрану, типом розгортки, протоколом обміну інформацією. В приладі, що заявляється реалізована можливість формування розгортки по рядкам, по стовпчикам, або радіально в залежності від типу літального апарата. Кількість рядків, стовпців та їх довжина також визначається формувачем відеоінформації в залежності від умов, які задані в блоці адаптації до типу літального апарата. Можливість адаптації приладу, що заявляється, до різних типів індикаторів, які встановлені на різних літальних апаратах, забезпечує його універсальність і суттєво скорочує об'єм робіт щодо сполучення його з існуючим обладнанням на різних типах літальних апаратів. Виконання формувача відеоінформації з можливістю проводити формування графічної інформації з орієнтацією щодо магнітного курсу або шляхового кута, в залежності від інформації про стан органів управління, що одержана від індикатора, забезпечує можливість тестування і перевірки працездатності приладу при відсутності інформації про шляховий кут (наприклад, на стоянці). Виконання формувача відеоінформації з можливістю формування графічної інформації в одному з двох режимів: у режимі відносних висот, якщо робоча зона має хоч би один елемент підстильної поверхні, над яким перевищення висоти польоту літального апарата менш ніж 600м, або у режимі абсолютних висот. Наявність двох режимів формування зображення підстильної поверхні (відносної і абсолютної) дає додаткову інформацію про характер підстильної поверхні, а саме: про відсутність (в режимі абсолютних висот) в межах екрана елементів підстильної поверхні, перевищення висоти польоту над якими менше 600м. Наявність додаткової візуально відображувальної інформації дозволяє зменшити навантаження на пілота, що забезпечує підви щення безпеки польоту. Виконання формувача мовних і світлових попереджень з можливістю видачі мовних сповіщень однією з двох мов російською або англійською, які задані дискретним сигналом у блоці адаптації до типу літального апарата, підвищує експлуатаційні якості пристрою і забезпечує краще сприйняття звукової інформації мовою більш зручною для пілота. Блок прийому інформації про параметри польоту може приймати необхідну інформацію від зовнішніх датчиків в аналоговому вигляді в формі сигналів з потенціометричних датчиків, сигналів зі щіток, сигналів у форматі синусно - косинусних трансформаторів (СКТ), сигналів у вигляді постійної напруги, або у цифровому вигляді. Тип сигналу, що приймається, (один з аналогових або цифровий) задається також у блоці адаптації до типу літального апарата. Обладнання, яке встановлено на різних типах літальних апаратів, може видавати споживачам інформацію про параметри польоту у різних форматах. Наприклад, інформація про висоту може прийматися з потенціометричних датчиків або у цифровому форматі, інформація про магнітний азимут - в форматі СКТ або цифровому форматі і т.д.. Крім того, частота видачі однакової цифрової інформації може бути різною на різних типах літальних апаратів. Можливість прийому 8 інформації про параметри польоту в різних форматах, що реалізується у блоці прийому інформації про параметри польоту, також забезпечує універсальність пристрою, що заявляється і суттєво скорочує об'єм робіт щодо сполучення його з існуючим обладнанням на різних типах літальних апаратів. Суть корисної моделі пояснюється кресленнями. На Фіг.1 - зображена блок - схема пристрою для раннього попередження наближення землі. На Фіг.2 - наведено зображення на екрані індикатора в режимі "Відносних висот", де Нгеом це геометрична висота літального апарата відносно підстильної поверхні. На Фіг.3 - наведено зображення на екрані індикатора в режимі "Абсолютних висот", де Нгеом це геометрична висота літального апарата відносно підстильної поверхні. Пристрій для раннього попередження наближення землі містить блок бази даних рельєфу земної поверхні, аеродромів і штучни х перешкод 1, вхід якого з'єднаний з виходом блока заповнення і оновлення бази даних 2, а вихід - з першим входом блока обробки інформації 3. Блок обробки інформації 3 містить робочий оперативний запам'ятовуючий пристрій (ОЗП) для збереження просторового тривимірного зображення рельєфу (локальної карти) 4, вхід якого являється першим входом блока обробки інформації 3, а вихід з'єднаний з входами обчислювача законів попередження в залежності від типу літального апарата 5, обчислювача законів обльоту 6 і формувача відеоінформації 7. Др угий вхід формувача відеоінформації 7 з'єднаний з обчислювачем законів обльоту 6. Другий вхід обчислювача законів попередження в залежності від типу літального апарата 5 являється другим входом блока обробки інформації 3. Вихід обчислювача законів попередження в залежності від типу літального апарата 5 з'єднаний з другим входом обчислювача законів обльоту 6 і першим входом аналізатора положення 8. Виходи аналізатора положення 8 з'єднані з входом обчислювача законів обльоту 6 і входом формувача голосових і сві тлових попереджень 9. Крім цього блок обробки інформації 3 містить обчислювач етапу польоту 10, вхід якого сумісно з другим входом обчислювача законів попередження в залежності від типу літального апарата 5 утворюють другий вхід блока обробки інформації 3. Вихід обчислювача етапу польоту 10 з'єднаний з входом обчислювача законів попередження в залежності від етапу польоту 11, вихід якого підключений до додаткових входів аналізатора положення 8 і обчислювача законів обльоту 6.Один із входів блока приймання інформації про параметри польоту 12 з'єднаний з виходом блока адаптації до типу літального апарата 13, інші його входи з'єднані з виходами зовнішніх датчиків визначення динамічних параметрів польоту 14 (радіовисотомір, система повітряних сигналів, інерційна навігаційна система, супутникова навігаційна система, обчислювальна система літака, навігаційно - посадочна апаратура та ін..). Ви хід блока приймання інформації про параметри польоту 12 9 25341 з'єднаний з другим входом блока обробки інформації 3, при чому перший вихід блока обробки інформації 3, який є виходом формувача відеоінформації 7, з'єднаний з двома зовнішніми багатофункціональними індикаторами (БФІ) 15, 16. Другий і третій виходи блока обробки інформації 3, що є виходами формувача голосових і світлових попереджень 9 з'єднані з зовнішніми гучномовцями 17 і світловими сигналізаторами 18, відповідно. Пристрій для раннього попередження наближення землі працює таким чином. Блок обробки інформації 3 виконує оцінювання небезпечної ситуації і можливості її усунення шляхом стандартного вертикального обльоту з урахуванням експлуатаційних характеристик літального апарата і динамічних параметрів польоту, при цьому обчислювач законів попередження в залежності від типу літального апарата 5, на входи якого надходять сигнали від блока приймання інформації про параметри польоту 12 і від робочого оперативного запам'ятовуючого пристрою для збереження просторового тривимірного зображення рельєфу (локальної карти) 4, здійснює на основі даних про координати, параметри польоту і технічні характеристики літального апарата розрахунок законів попередження. Обчислювач законів обльоту 6, на входи якого надходить інформація від обчислювача законів попередження в залежності від типу літального апарата 5, аналізатора положення 8 про миттєве і майбутнє положення і робочого оперативного запам'ятовуючого пристрою для збереження просторового тривимірного зображення рельєфу (локальної карти) 4, на основі даних про координати, параметри польоту і інформації від аналізатора положення 8 здійснює обчислення прогнозованої траєкторії на фоні підстильної поверхні в межах заданого часу прогнозування, який одержаний з виходу обчислювача законів попередження в залежності від етапу польоту 11. Обчислювач е тапу польоту 10 на основі інформації про динамічні параметри польоту, які надходять з виходу блока приймання інформації про параметри польоту 12, визначає один з наступних етапів польоту: крейсерський політ (політ за маршрутом), політ в зоні 1 аеродрому, політ в зоні 2 аеродрому або розворот. В залежності від етапу польоту визначають час прогнозування майбутньої траєкторії для формування аварійної і попереджувальної сигналізації. Після визначення етапу польоту обчислювачем етапу польоту 10, обчислювач законів попередження в залежності від етапу польоту 11 видає інформацію про обчислений закон попередження на входи аналізатора положення 8 і обчислювача законів обльоту 6. Обчислювач законів обльоту 6 в залежності від інформації, що надходить з робочого оперативного запам'ятовуючого пристрою для збереження просторового тривимірного зображення рельєфу ( локальної карти) 4, обчислювача законів попередження в залежності від типу літального апарата 5, аналізатора положення 8, обчислювача законів попередження в залежності від етапу польоту 11, визначає степінь небезпеки зіткнення з підстильною поверхнею рельєфу і результат аналізу передає до формувача відеоінформації 7. Аналізатор 10 положення 8 на основі інформації від блока обчислювача законів попередження в залежності від типу літального апарата 5 і обчислювача законів попередження в залежності від етапу польоту 11 визначає параметри миттєвого і майбутнього положення і видає їх на вхід обчислювача законів обльоту 6. Крім цього у випадку небезпечної ситуації ця інформація надходить до формувача голосових і світлови х попереджень 9 для видачі їх до зовнішніх пристроїв гучномовців 17 і світлових сигналізаторів 18. Формувач відеоінформації 7 на основі інформації, що надходить від робочого оперативного запам'ятовуючого пристрою для збереження просторового тривимірного зображення рельєфу (локальної карти) 4 і обчислювача законів обльоту 6, формує тривимірне зображення рельєфу і профільну проекцію і видає цю інформацію у цифровому вигляді зовнішнім БФІ 15, 16. При виникненні небезпечної ситуації колір зображення небезпечних ділянок на плановій проекції змінюється на яскраво-жовтий у випадку попереджувальної сигналізації і яскраво - червоний у випадку аварійної сигналізації. Інформація, що сформована в робочому оперативному запам'ятовуючому пристрої для збереження просторового тривимірного зображення рельєфу (локальної карти) 4 постійно оновлюється з виходу блоку бази даних 1 як функція від координат підстильної поверхні. Інформація блока бази даних рельєфу земної поверхні, аеродромів і штучни х перешкод 1 оновлюється у процесі технічного обслуговування пристрою з періодичністю, яка задається ІСАО через блок заповнення і оновлення бази даних 2. Формувач відеоінформації 7 здійснює видачу цифрової інформації у форматі, який відповідає вимогам засобів візуалізації, що задаються у блоці адаптації до типу літального апарата 13. Формувач відеоінформації 7 здійснює видачу графічної інформації у двох режимах: "Відносних висот" і "Абсолютних висот" (режим видачі встановлюється автоматично). Графічна інформація (Фіг.2) видається в режимі "Відносних висот", якщо в робочій зоні є хоч би один елемент підстильної поверхні, перевищення літального апарата над яким менше ніж 610м. Графічна інформація (Фіг.3) видається в режимі "Абсолютних висот", якщо в робочій зоні немає жодного елемента підстильної поверхні, перевищення літального апарата над яким менше ніж 610м. В цьому режимі підстильна поверхня на екрані індикатора зображується тільки зеленим кольором, при цьому відмінність між максимальною і мінімальною висотами елемента підстильної поверхні розбивається на п'ять рівномірних зон зеленого кольору різної яскравості, причому яскравість кожної зони зростає із збільшенням висоти цієї зони. Блок приймання інформації про параметри польоту 12 може приймати необхідну інформацію від зовнішніх датчиків визначення динамічних параметрів польоту 14 в аналоговому вигляді у формі сигналів з потенціометричних датчиків, сигналів зі щіток, сигналів інформації у форматі синусно - косинусно трансформаторів (СКТ), сигналів у вигляді постійної напруги або у цифровому вигляді. Тип сигналу, що приймається (один з аналогових або цифровий), задається також у блоці 11 25341 адаптації до типу літального апарата 13. Формувач голосових і світлови х попереджень 9 видає голосові мовні повідомлення однією з двох мов російською або англійською. Мова, якою видають Комп’ютерна в ерстка М. Мацело 12 ся голосові повідомлення визначається станом разової команди у блоці адаптації до типу літального апарата 13. Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for warning about the aircraft approaching the earth surface
Автори англійськоюAlmazov Leonid Oleksandrovych, Drozdov Oleksandr Oleksiiovych, Biletskyi Oleksandr Kindratovych, Ivanova Kateryna Hennadiivna
Назва патенту російськоюУстройство для предупреждения о приближении летательного аппарата к земле
Автори російськоюАлмазов Леонид Александрович, Дроздов Александр Алексеевич, Билецкий Александр Кондратьевич, Иванова Катерина Геннадиевна
МПК / Мітки
МПК: G08G 5/00
Мітки: попередження, раннього, пристрій, землі, наближення
Код посилання
<a href="https://ua.patents.su/6-25341-pristrijj-dlya-rannogo-poperedzhennya-nablizhennya-zemli.html" target="_blank" rel="follow" title="База патентів України">Пристрій для раннього попередження наближення землі</a>
Пристрій для попередження зіткнень на залізничному переїзді
Номер патенту: 6360
Опубліковано: 16.05.2005
Автори: Мельник Ярослав Андрійович, Мельник Олег Андрійович, Матвієнко Сергій Миколайович
МПК: B61L 29/00, G08G 1/04, G08G 1/16
Мітки: зіткнень, переїзді, залізничному, попередження, пристрій
Формула / Реферат:
1. Пристрій для попередження зіткнень на залізничному переїзді, що містить блок контролю наявності перешкоди в зоні переїзду, аналізатор сигналів наявності перешкоди, блок контролю наявності потягу на ділянці наближення, який відрізняється тим, що він додатково оснащений схемою керування, модулятором, передавачем, блоком виявлення рухомого складу в зоні переїзду, при цьому блок контролю наявності перешкоди в зоні переїзду містить не менше...
Пристрій для попередження зіткнень повітряних суден
Номер патенту: 25757
Опубліковано: 30.10.1998
Автори: Семенченко Андрій Іванович, Совтус Інна Кузьмівна, Шутко Микола Олександрович, Троценко Володимир Петрович, Корнійчук Май Тихонович, Білецький Анатолій Якович
МПК: G06F 15/17
Мітки: суден, попередження, пристрій, зіткнень, повітряних
Формула / Реферат:
1. Пристрій для попередження зіткнень повітряних суден [1], що містить три регістри, дешифратор, три елементи АБО, два суматори, блок постійної пам'яті, n елементів І, n блоків обробки першої, другої та третьої координати, n блоків аналізу курсу, виходи яких утворюють n перших керуючих виходів пристрою, інформаційні входи першого, другого й третього регістрів є першою, другою й третьою групами одноіменних входів пристрою відповідно, виходи...
Пристрій для попередження водія автотранспорту про близькість аварійно небезпечного об’єкта

Номер патенту: 79446
Опубліковано: 25.06.2007
Автори: Ганопольський Юрій Всеволодович, Присяжнюк Анатолій Йосипович, Прокопенко Юрій Миколайович, Бурачек Всеволод Германович, Шульц Роман Володимирович, Каракай Сергій Васильович
МПК: G08G 1/16, G01C 21/26, G08G 1/00, G01S 5/14
Мітки: небезпечного, водія, попередження, автотранспорту, аварійної, об'єкта, пристрій, близькість
Формула / Реферат:
Пристрій для попередження водія автотранспорту про близкість аварійно небезпечного об'єкта, який складається з GPS-приймача, електронного блока перетворення, запам'ятовуючого блока, блока фільтрації сигналів, блока порівняння, генератора світлового та звукового випромінювача, блока електроживлення, який відрізняється тим, що в ньому вихід GPS-приймача з’єднаний з першими входами блока фільтрації сигналів і електронного блока перетворення,...
Пристрій для сигналізаціі про небезпечне наближення людини до електроустановки
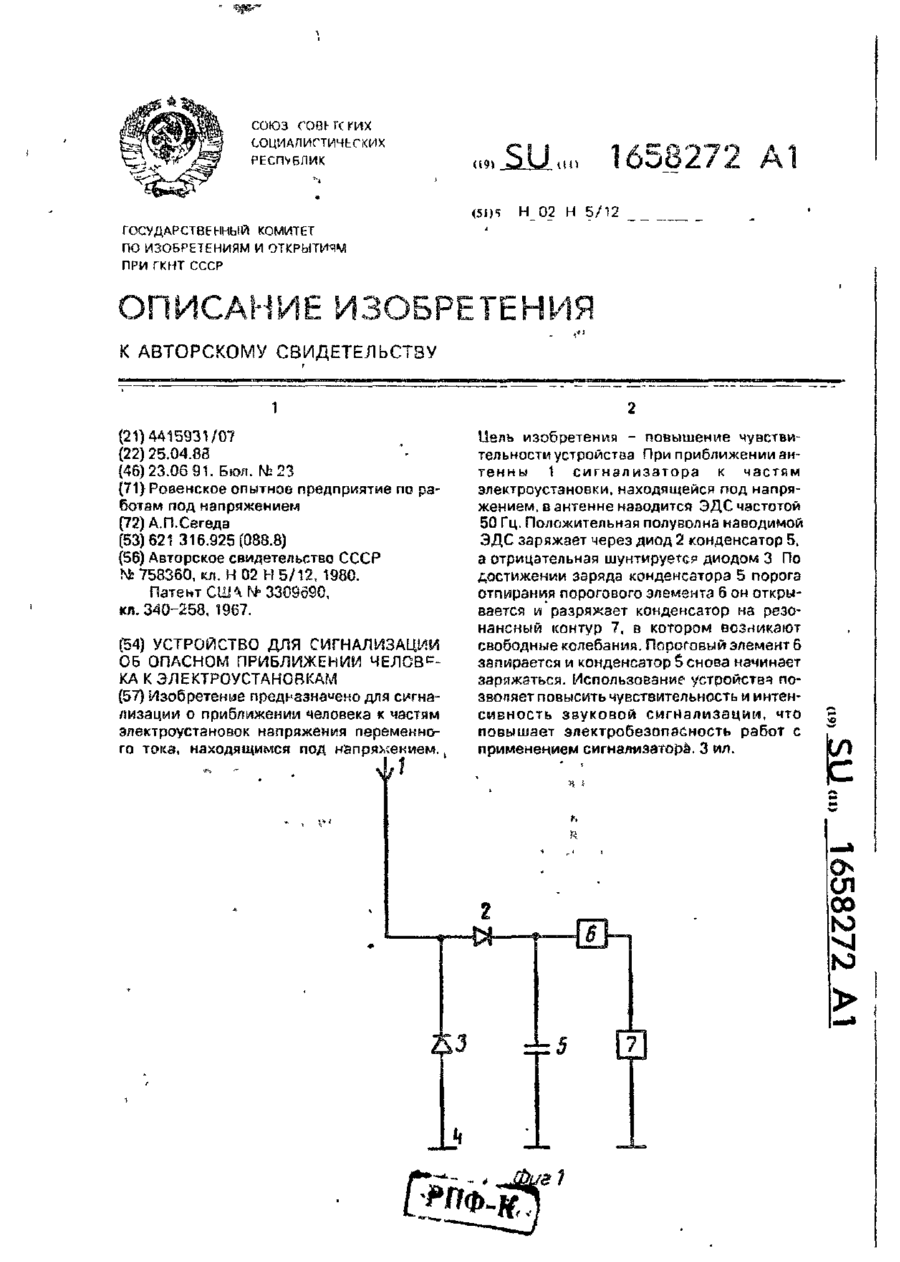
Номер патенту: 11853
Опубліковано: 25.12.1996
Автор: Сегеда Олексій Петрович
МПК: H02H 5/00
Мітки: наближення, сигналізаціі, небезпечне, електроустановки, пристрій, людини
Формула / Реферат:
Устройство для сигнализации об опасном приближении человека к електроустановкам, содержащее антенну и корпус, в котором размещены первый диод, соединенный анодом с антенной, а катодом - с первой обкладкой конденсатора, вторая обкладка которого соединена с анодом второго диода, катод которого соединен с антенной, а параллельно конденсатору включены последовательно соединенные пороговый элемент и блок индикации, отличающееся тем, что, с...
Пристрій для оповіщення про наближення потягу під час ремонту залізничних колій
Номер патенту: 21857
Опубліковано: 30.04.1998
Автори: Сліпченко Валентин Федорович, Копійка Володимир Олексійович
МПК: B61L 23/00
Мітки: оповіщення, колій, пристрій, залізничних, потягу, ремонту, наближення
Формула / Реферат:
1. Устройство для оповещения о приближении поезда при ремонте железнодорожных путей, содержащее передающие аппараты ограждения, выполненные из симплексной радиостанции, к входу передатчика которой подсоединены выходы тональных генераторов сигналов оповещения, и приемный аппарат сигналов оповещения с узлом оповещения, состоящий из приемника радиосигналов, к выходу которого подсоединены фильтры сигналов оповещения, и группы тональных...
Попередній патент: Спосіб видалення підшкірних вен при варикозній хворобі нижніх кінцівок
Наступний патент: Замкове з`єднання шнекових секцій бурового поставу
Випадковий патент: Спосіб упакування супозиторіїв