Радіолокаційний фазовий вимірювач кутових координат із бе3упинним випромінюванням
Номер патенту: 40133
Опубліковано: 16.07.2001
Автори: Бахвалов Валентин Борисович, Порошин Сергій Михайлович




Формула / Реферат
Радіолокаційний фазовий вимірювач кутових координат із безупинним випромінюванням, що містить передавач безупинного сигналу, пов'язаний прямокутним хвилеводом із рупорною антеною, що передає, приймальну антенну систему, приймачі і два фазовимірювача, що відрізняються тим, що приймальна антенна система виконана з трьох рупорних антен із двох однакових пірамідальних рупори в кожній антені, розташованих на відстані друг від друга по горизонталі, рівній горизонтальному розміру апертури приймального рупора, приймальні антени розташовані під рупором антени, що передає, симетрично щодо вертикальної вісі апертури цього рупора на відстані по вертикалі, рівній однаковому у всіх рупорів вертикальному розміру апертури, у розкривах рупорів, що передає, верхньої і середньої приймальних антен установлені металевопластинчаті лінзи, горизонтальний розмір апертури рупора антени, що передає, у півтори рази більше горизонтального розміру апертури рупора приймальної антени, рупори кожної приймальної антени пов'язані зі своїм приймачем двома фідерними коаксіальними лініями однакової довжини, що залучені до входу відповідного приймача послідовно в протилежній полярності, виходи приймачів нижньої і середньої антени пов'язані з першим фазовимірювачем, а виходи приймачів верхньої і середньої антени - із другим фазовимірювачем, виходи фазовимірювачів пов'язані з обчислювачем азимутального куту цілі з такого трансцендентного рівняння


де β - азимутальний кут цілі щодо осі антени,
θ - кут місця цілі,
b - вертикальний розмір апертури рупора,
α- горизонтальний розмір апертури приймального рупора,
Δφ1 - зсув сигналу на виході приймача середньої антени щодо сигналу на виході приймача нижньої антени,
х, у - змінні інтегрування,
arg - символ аргументу комплексного числа,
Rа - довжина приймального рупора в горизонтальній площині,
Rb - довжина рупора у вертикальній площині.
Текст
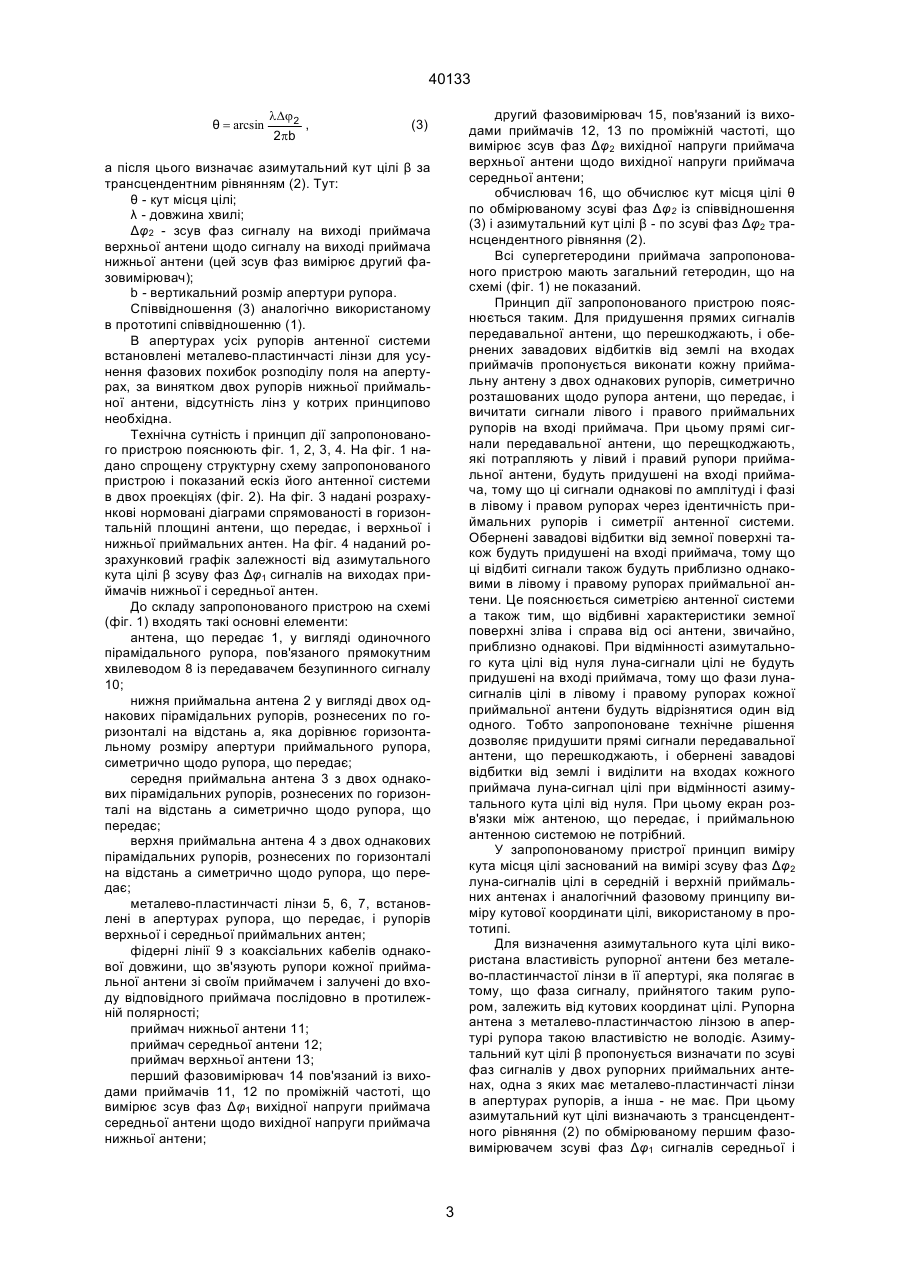
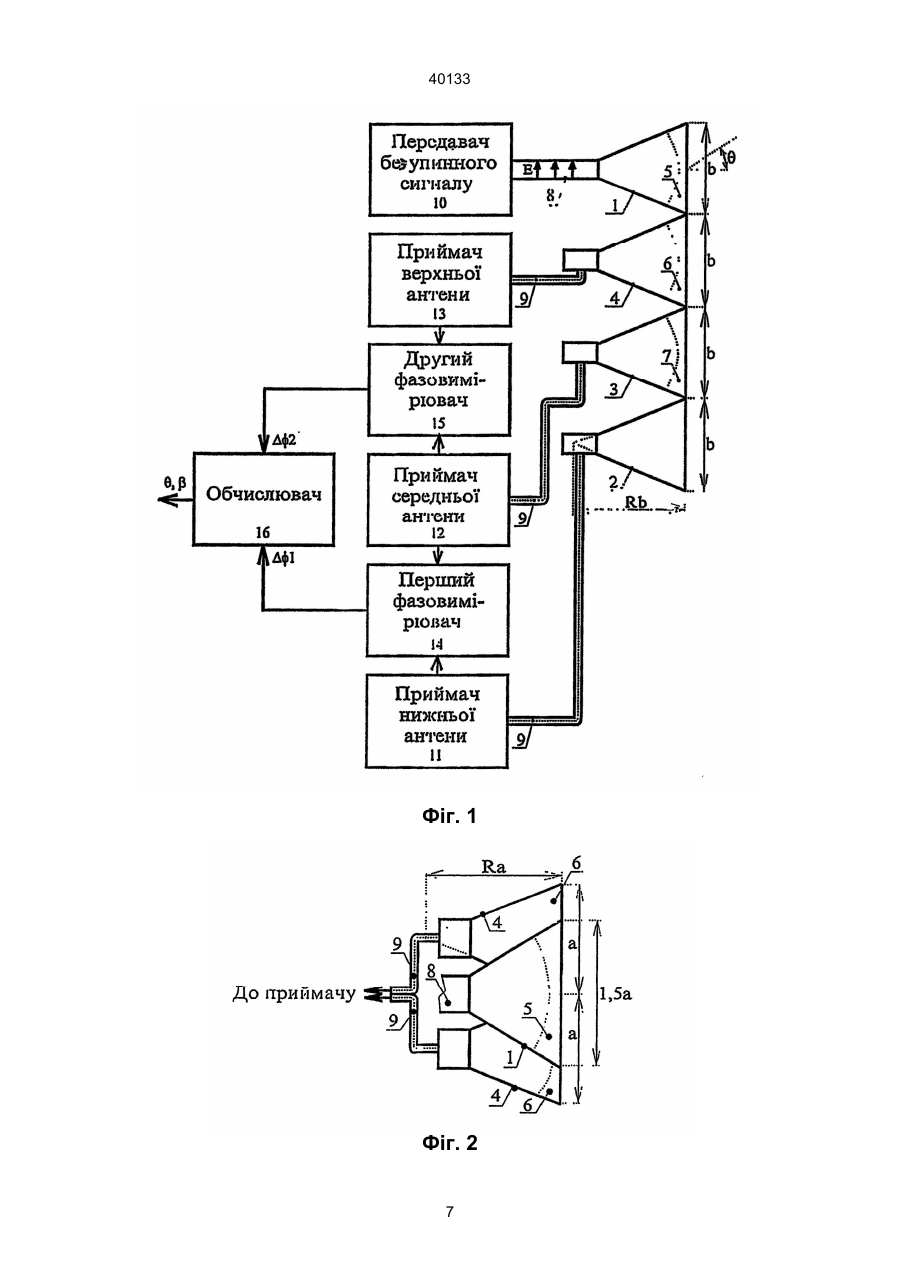
Радіолокаційний фазовий вимірювач кутових координат із безупинним випромінюванням, що містить передавач безупинного сигналу, пов'язаний прямокутним хвилеводом із рупорною антеною, що передає, приймальну антенну систему, приймачі і два фазовимірювачі, що відрізняється тим, що приймальна антенна система виконана з трьох рупорних антен із двох однакових пірамідальних рупорів в кожній антені, розташованих на відстані друг від друга по горизонталі, рівній горизонтальному розміру апертури приймального рупора, приймальні антени розташовані під рупором антени, що передає, симетрично щодо вертикальної осі апертури цього рупора на відстані по вертикалі, рівній однаковому у всіх рупорів вертикальному розміру апертури, у розкривах рупорів, що передає, верхньої і середньої приймальних антен установлені металевопластинчаті лінзи, горизонтальний розмір апертури рупора антени, що передає, у півтора рази більше горизонтального розміру апертури рупора приймальної антени, рупори кожної приймальної антени пов'язані зі своїм приймачем двома фідерними коаксіальними лініями однакової довжини, що залучені до входу відповідного приймача послідовно в протилежній поляр ності, виходи приймачів нижньої і середньої антени пов'язані з першим фазовимірювачем, а виходи приймачів верхньої і середньої антени - із другим фазовимірювачем, виходи фазовимірювачів пов'язані з обчислювачем азимутального кута цілі з такого трансцендентного рівняння Винахід відноситься до області радіолокації і може бути використований в радіолокаторах із безупинним випромінюванням мікрохвильового діапазону для виміру азимута і кута місця цілі. Відомий амплітудній радіолокаційний вимірювач кутової координати цілі [1, с. 42, рис. 1.25]. Аналог містить передавач імпульсного сигналу, антену з антенним перемикачем, приймач і індикатор кругового огляду. Антену обертають по азимуті, а азимут цілі визначають по положенню антени в момент прийому максимального луна-сигналу цілі. Хибою аналога є те, що його не можна використовувати в радіолокаторі безупинного випромінювання, тому що ту саму антену не можна використовувати одночасно для передачі і прийому сигналів. Як прототип обраний фазовий вимірювач кутової координати з рознесеною антенною системою [1]. Прототип містить приймальні антени, рознесені на відстань d і пов'язані зі своїми прийма 2 pb sin q - Dj 1 l - arg b/2 é 2p æ öù 2 2 exp ê j ç y sin q - R b + y + R b ÷údy øû ë l è y=-b / 2 ò - arg a/2 ò x = -a / 2 cos px ´ a (13) 40133 (19) UA (11) де: β - азимутальний кут цілі щодо осі антени, θ - кут місця цілі, b - вертикальний розмір апертури рупора, a - горизонтальний розмір апертури приймального рупора, Δφ1 – зсув фаз сигналу на виході приймача середньої антени щодо сигналу на виході приймача нижньої антени, х, у - змінні інтегрування, arg - символ аргументу комплексного числа, Ra - довжина приймального рупора в горизонтальній площині, Rb - довжина рупора у вертикальній площині. A é 2p æ öù 2 2 ´ expê j ç x cos q × sin b - R a + x + R a ÷ú dx = 0, øû ë l è 40133 передає, приймальну антенну систему, приймачі і два фазовимірювачі, відповідно до винаходу приймальна антенна система виконана з трьох рупорних антен по два однакових пірамідальних рупори в кожній антені, розташованих на відстані один від одного по горизонталі, рівній горизонтальному розміру апертури приймального рупора; приймальні антени розташовані під рупором антени, що передає, симетрично щодо вертикальної осі апертури цього рупора на відстані одна від одної по вертикалі, рівній однаковому у всіх рупорів вертикальному розміру апертури; у розкивах рупорів, що передають, верхньої і середньої приймальних антен установлені металево-пластинчасті лінзи; горизонтальний розмір апертури рупора антени, що передає, у півтора разу більше горизонтального розміру апертури рупора приймальної антени; рупори кожної приймальної антени пов'язані зі своїм приймачем двома фідерними коаксіальними лініями однакової довжини, що залучені до входу відповідного приймача послідовно в протилежній полярності; виходи приймачів нижньої і середньої антен пов'язані з першим фазовимірювачем, а виходи приймачів верхньої і середньої антен - з другим фазовимірювачем; виходи фазовимірювачів пов'язані з обчислювачем азимутального куту цілі з такого трансцендентного рівняння чами, і фазовимірювач для виміру зсуву фаз сигналів, прийнятих рознесеними антенами. Для виявлення і виміру кутової координати цілі, що не випромінює, прототип повинний містити також антену, що передає, (наприклад, рупорну антену у вигляді одного пірамідального рупора), пов'язану хвилеводом із передавачем (наприклад, передавачем безупинного синусоїдального сигналу). У прототипі визначення кутової координати цілі (наприклад, кута місця цілі θ) здійснюють по зсуву фаз Δφ сигналів рознесених приймальних антен за співвідношенням q = arcsin l × Dj , 2pd (1) де: θ - кутова координата цілі; λ - довжина хвилі; d - відстань між приймальними антенами; Δφ - зсув фаз сигналів, прийнятих рознесеними антенами. Для забезпечення можливості виміру двох кутових координат цілі прототип повинен мати антенну систему з чотирьох приймальних антен, дві з яких рознесені по вертикалі, а дві інші - по горизонталі, чотири приймачі, кожний із яких пов'язаний зі своєю антеною, і два фазовимірювачі для виміру зсувів фаз сигналів в антенах, рознесених по вертикалі і по горизонталі. Хибою прототипу є те, що при використанні передавача з безупинним сигналом прямі сигнали антени, що передає, потрапляють у приймальні антени і заважають виявляти луна-сигнали цілі. Крім того, обернені завадові відбитки сигналів, що зондують, від земної поверхні також потрапляють у приймальні антени й утруднюють виявлення мало швидкісних цілей на фоні цих відбитків. Для придушення прямих сигналів передавальної антени, що перешкоджають, у приймальних антенах потрібно забезпечити розв'язку антени, що передає, і рознесеної приймальної антенної системи, що найчастіше важко реалізувати практично, тому що потрібно використовувати громіздкий екран розв'язки між антенами. В основу винаходу поставлена задача удосконалення радіолокаційного фазового вимірювача кутових координат із безупинним випромінюванням, у якому за рахунок виконання приймальної антенної системи з трьох рознесених по висоті рупорних антен по два рупори в кожній антені, симетричного розташування рупорів кожної приймальної антени щодо одного рупора, що передає, і вирахування сигналів двох рупорів кожної антени на входах відповідних приймачів забезпечується придушення прямих сигналів передавача, що перешкоджають, і обернених завадових відбитків від землі на входах приймачів, і вимір двох координат цілі, що дозволяє реалізувати антенну систему без громіздкого екрана розв'язки між антенами і покращує перешкодозахищеність радіолокатора з безупинним випромінюванням від пасивних перешкод від землі. Поставлена задача вирішується тим, що в радіолокаційному фазовому вимірювачі кутових координат із безупинним випромінюванням, що містить передавач безупинного сигналу, пов'язаний прямокутним хвилеводом з рупорною антеною, що 2 pb sin q - Dj 1 l - arg b/2 é 2p æ öù 2 2 exp ê j ç y sin q - R b + y + R b ÷údy l è øû ë y=-b / 2 ò - arg a/2 ò x = -a / 2 cos px ´ a (2) é 2p æ öù 2 2 ´ expê j ç x cos q × sin b - R a + x + R a ÷ú dx = 0, øû ë l è де: β - азимутальний кут цілі щодо осі антени; θ - кут місця цілі; b - вертикальний розмір апертури рупора; a- горизонтальний розмір апертури приймального рупора; λ - довжина хвилі; Δφ1 - зсув фаз сигналу на виході приймача середньої антени щодо сигналу на виході приймача нижньої антени; х, у - змінні інтегрування; arg - символ аргументу комплексного числа; Ra - довжина приймального рупора в горизонтальній площині; Rb, - довжина рупора у вертикальній площині. При цьому четверта приймальна антена, що була в прототипі, і четвертий приймач із складу запропонованого пристрою виключені, а також не потрібний громіздкий екран розв'язки між антеною, що передає, і приймальною антенною системою. Обчислювач запропонованого пристрою спочатку обчислює кут місця цілі θ за співвідношенням 2 40133 θ = arcsin l Dj 2 , 2pb другий фазовимірювач 15, пов'язаний із виходами приймачів 12, 13 по проміжній частоті, що вимірює зсув фаз Δφ2 вихідної напруги приймача верхньої антени щодо вихідної напруги приймача середньої антени; обчислювач 16, що обчислює кут місця цілі θ по обмірюваному зсуві фаз Δφ2 із співвідношення (3) і азимутальний кут цілі β - по зсуві фаз Δφ2 трансцендентного рівняння (2). Всі супергетеродини приймача запропонованого пристрою мають загальний гетеродин, що на схемі (фіг. 1) не показаний. Принцип дії запропонованого пристрою пояснюється таким. Для придушення прямих сигналів передавальної антени, що перешкоджають, і обернених завадових відбитків від землі на входах приймачів пропонується виконати кожну приймальну антену з двох однакових рупорів, симетрично розташованих щодо рупора антени, що передає, і вичитати сигнали лівого і правого приймальних рупорів на вході приймача. При цьому прямі сигнали передавальної антени, що перещкоджають, які потрапляють у лівий і правий рупори приймальної антени, будуть придушені на вході приймача, тому що ці сигнали однакові по амплітуді і фазі в лівому і правом рупорах через ідентичність приймальних рупорів і симетрії антенної системи. Обернені завадові відбитки від земної поверхні також будуть придушені на вході приймача, тому що ці відбиті сигнали також будуть приблизно однаковими в лівому і правому рупорах приймальної антени. Це пояснюється симетрією антенної системи а також тим, що відбивні характеристики земної поверхні зліва і справа від осі антени, звичайно, приблизно однакові. При відмінності азимутального кута цілі від нуля луна-сигнали цілі не будуть придушені на вході приймача, тому що фази лунасигналів цілі в лівому і правому рупорах кожної приймальної антени будуть відрізнятися один від одного. Тобто запропоноване технічне рішення дозволяє придушити прямі сигнали передавальної антени, що перешкоджають, і обернені завадові відбитки від землі і виділити на входах кожного приймача луна-сигнал цілі при відмінності азимутального кута цілі від нуля. При цьому екран розв'язки між антеною, що передає, і приймальною антенною системою не потрібний. У запропонованому пристрої принцип виміру кута місця цілі заснований на вимірі зсуву фаз Δφ2 луна-сигналів цілі в середній і верхній приймальних антенах і аналогічний фазовому принципу виміру кутової координати цілі, використаному в прототипі. Для визначення азимутального кута цілі використана властивість рупорної антени без металево-пластинчастої лінзи в її апертурі, яка полягає в тому, що фаза сигналу, прийнятого таким рупором, залежить від кутових координат цілі. Рупорна антена з металево-пластинчастою лінзою в апертурі рупора такою властивістю не володіє. Азимутальний кут цілі β пропонується визначати по зсуві фаз сигналів у двох рупорних приймальних антенах, одна з яких має металево-пластинчасті лінзи в апертурах рупорів, а інша - не має. При цьому азимутальний кут цілі визначають з трансцендентного рівняння (2) по обмірюваному першим фазовимірювачем зсуві фаз Δφ1 сигналів середньої і (3) а після цього визначає азимутальний кут цілі β за трансцендентним рівнянням (2). Тут: θ - кут місця цілі; λ - довжина хвилі; Δφ2 - зсув фаз сигналу на виході приймача верхньої антени щодо сигналу на виході приймача нижньої антени (цей зсув фаз вимірює другий фазовимірювач); b - вертикальний розмір апертури рупора. Співвідношення (3) аналогічно використаному в прототипі співвідношенню (1). В апертурах усіх рупорів антенної системи встановлені металево-пластинчасті лінзи для усунення фазових похибок розподілу поля на апертурах, за винятком двох рупорів нижньої приймальної антени, відсутність лінз у котрих принципово необхідна. Технічна сутність і принцип дії запропонованого пристрою пояснюють фіг. 1, 2, 3, 4. На фіг. 1 надано спрощену структурну схему запропонованого пристрою і показаний ескіз його антенної системи в двох проекціях (фіг. 2). На фіг. 3 надані розрахункові нормовані діаграми спрямованості в горизонтальній площині антени, що передає, і верхньої і нижньої приймальних антен. На фіг. 4 наданий розрахунковий графік залежності від азимутального кута цілі β зсуву фаз Δφ1 сигналів на виходах приймачів нижньої і середньої антен. До складу запропонованого пристрою на схемі (фіг. 1) входять такі основні елементи: антена, що передає 1, у вигляді одиночного пірамідального рупора, пов'язаного прямокутним хвилеводом 8 із передавачем безупинного сигналу 10; нижня приймальна антена 2 у вигляді двох однакових пірамідальних рупорів, рознесених по горизонталі на відстань а, яка дорівнює горизонтальному розміру апертури приймального рупора, симетрично щодо рупора, що передає; середня приймальна антена 3 з двох однакових пірамідальних рупорів, рознесених по горизонталі на відстань а симетрично щодо рупора, що передає; верхня приймальна антена 4 з двох однакових пірамідальних рупорів, рознесених по горизонталі на відстань а симетрично щодо рупора, що передає; металево-пластинчасті лінзи 5, 6, 7, встановлені в апертурах рупора, що передає, і рупорів верхньої і середньої приймальних антен; фідерні лінії 9 з коаксіальних кабелів однакової довжини, що зв'язують рупори кожної приймальної антени зі своїм приймачем і залучені до входу відповідного приймача послідовно в протилежній полярності; приймач нижньої антени 11; приймач середньої антени 12; приймач верхньої антени 13; перший фазовимірювач 14 пов'язаний із виходами приймачів 11, 12 по проміжній частоті, що вимірює зсув фаз Δφ1 вихідної напруги приймача середньої антени щодо вихідної напруги приймача нижньої антени; 3 40133 а, b - горизонтальний і вертикальний розміри апертури кожного рупора. Напруженість електричного поля системи з двох однакових пірамідальних рупорів без металево-пластинчастих лінз, рознесених по горизонталі на відстань, яка дорівнює горизонтальному розміру а апертури рупора, і живлять у протифазі, визначається таким відомим співвідношенням [2] нижньої приймальних антен. Для цього не потрібно розносити середню і нижню антени по горизонталі. Для обгрунтування можливості практичної реалізації запропонованого пристрою і його істотних відмінних ознак нижче наводяться необхідні математичні співвідношення. Напруженість електричного поля одиночного пірамідального рупора, що передає, із металевопластинчастою лінзою в його апертурі визначається таким відомим співвідношенням [2] æ pa ö & E1(q, b) = -E 0ab × sin ç cosq × sin b ÷ ´ l è ø -j æ πb ö sinç sinθ ÷ 1+ cosθ × cosβ λ ø´ & × × è En j (θ,β) = jE0a 0b πb 4λ r sinθ λ é æ πa0 π ö ù (4) πö æ πa cosθ × sinβ + ÷ sinç 0 cosθ × sinβ - ÷ ú ê sinç 2ø 2øú λ λ ´ê è , + è πa0 ê πa0 π ú π cosθ × sinβ cosθ × sinβ + ê 2 2 ú λ λ û ë 2π -j r e λ a2 px j e ´ ò cos a x = -a 2 b2 ´ ò e j r ´ 2p æ 2 2 ö ç x cos q ×sin b - R a + x + R a ÷ l è ø dx ´ (6) 2p æ 2 2 ö ç y sin q - R b + y + R b ÷ l è ø dy, x = -b 2 & де: E1(q, b) - комплексна амплітуда напруженості електричного поля радіохвиль у точці спостереження в дальній зоні системи з двох протифазно живлених пірамідальних рупорів без металевопластинчастих лінз; θ, β - кутові координати точки спостереження; r - похила дальність від центру спільної апертури двох рупорів до точки спостереження; E0 - амплітуда напруженості електричного поля в центрі апертури кожного рупора; а, b - горизонтальний і вертикальний розміри апертури кожного рупора; х,у - змінні інтегрування по апертурі рупора (по горизонталі і по вертикалі); Ra, - довжина пірамідального рупора в горизонтальній площині; Rb - довжина пірамідального рупора у вертикальній площині. З співвідношень (5), (6) очевидно, що фаза поля радіохвиль системи з двох пірамідальних рупорів, у межах головного пелюстка діаграми спрямованості, залежить від напрямку випромінювання (від кутів θ, β) при відсутності металево-пластинчастих лінз в апертурах рупорів і не залежить - при наявності таких лінз. Ця властивість рупорних антен використана для визначення азимутального кута цілі β у запропонованому пристрої. Визначаючи зі співвідношень (5), (6) зсув фаз Δφ1 сигналів на вході приймачів середньої і нижньої антени з урахуванням того, що ці антени рознесені по висоті на відстань b, одержимо трансцендентне рівняння (2), що рекомендується використовувати для визначення азимутального кута цілі β по обмірюваному першим фазовимірювачем зсуві фаз Δφ1 за допомогою обчислювача 16. Азимутальний робочий сектор запропонованого пристрою визначається шириною головного пелюстка діаграми спрямованості антени, що передає 1, по нулях і дорівнює & де: E n j (θ, β ) - комплексна амплітуда напруженос ті електричного поля що випромінюються радіохвиль у точці спостереження в дальній зоні; θ, β - ріг місця й азимутальний кут точки спостереження; r - похила дальність від середини апертури рупора до точки спостереження; E0 - напруженість електричного поля в середині апертури рупора; a0, b - горизонтальний і вертикальний розміри прямокутної апертури рупора; λ - довжина хвилі. Напруженість електричного поля системи з двох однакових пірамідальних рупорів із металево-пластинчастими лінзами в їхніх апертурах, рознесених по горизонталі на відстань, яка дорівнює горизонтальному розміру а апертури рупора, і живлять у протифазі, визначається таким відомим співвідношенням [2] æ pa ö & E2 (q, b) = -E0ab sin ç cos q × sin b ÷ ´ l è ø 2p æ pb ö - j r sin ç sin q ÷ 1 + cos q × cos b e l l è ø´ ´ × × pb r 2l sin q l 2p 1 + cosq × cosb e l ´ × r l (5) é æ pa pö pöù æ pa ê sinç cos q × sinb + ÷ sin ç cos q × sin b - ÷ ú l 2øú 2ø èl ´ê è + , p pa p ú ê pa cos q × sin b cos q × sin b + ê l 2 ú 2 l ë û & де: E2 (q, b) - комплексна (амлітуда напруженості електричного поля радіохвиль у точці спостереження в дальній зоні; θ, β - кутові координати точки спостереження; r - похила дальність від центру спільної апертури двох рупорів до точки спостереження; E0 - амплітуда напруженості і електричного ноля и центрі апертури кожного рупора; 2Db nj = 2b0 = 2 arcsin 4 3l , 2a0 (7) 40133 Проведені розрахунки підтверджують можливість практичної реалізації запропонованого пристрою. Симетрична конструкція антенної системи, ідентичність приймальних рупорів і протифазне підключення рупорів приймальних антен до входу приймача фідерними лініями однакової довжини необхідні для забезпечення заглушування на входах приймачів прямих сигналів антени, що передає, і обернених завадових відбитків від землі. Наявність металево-пластинчастих лінз у розкривах рупорів верхньої і середньої антен і відсутність таких лінз у рупорах нижньої антени принципово необхідні для забезпечення можливості визначення азимутального кута місця цілі β за зсувом фаз Δφ1 сигналів середньої і нижньої антен при відсутності горизонтального розносу між цими антенами. Зазначене співвідношення горизонтальних розмірів апертур, що передають, і приймальних рупорів необхідне для забезпечення однозначності визначення азимутального кута цілі. Таким чином, запропонований пристрій забезпечує рішення поставленої задачі, усуває відзначені недоліки прототипу і може бути практично реалізований, а його зазначені відмінні ознаки є суттєвими і принципово необхідними для реалізації пристрою. Основні елементи запропонованого пристрою на схемі (фіг. 1) виконані таким чином. Антена, що передає 1, виконана у вигляді одиночного пірамідального рупора з металево-пластинчастої лінзою в його апертурі. Кожна приймальна антена виконана з двох ідентичних пірамідальних рупорів, пов'язаних із відповідними приймачами коаксіальними фідерними лініями 9 однакової довжини, що залучені до входу приймача послідовно в протилежній полярності. Це забезпечує протифазне живлення рупорів приймальної антени. Живлення приймального рупора коаксіальним фідером може бути здійснене, наприклад, за допомогою штиря, розміщеного у відрізку прямокутного хвилевода, пов'язаного з рупором. У апертурах рупорів верхньої і середньої приймальних антен установлені металево-пластинчасті лінзи 6, 7, а в рупорах нижньої приймальної антени такі лінзи відсутні. Рупори кожної приймальної антени рознесені по горизонталі на відстань, яка дорівнює горизонтальному розміру а приймального рупора, а горизонтальний розмір а0 рупору, що передає, у півтора рази більший. Вертикальний розмір апертур b у всіх рупорів однаковий, а антени рознесені по вертикалі на відстань b між сусідніми антенами. Рупори кожної приймальної антени розташовані симетрично щодо вертикалі, яка проходить через центр апертури рупора, що передає. Всі три приймачі 11, 12, 13 ідентичні і виконані у вигляді супергетеродинних приймачів із загальним гетеродином. Ці приймачі повинні мати ідентичні фазові характеристики, а ідентичність амплітудних характеристик приймачів не обов'язкова. Фазовимірювачі 14, 15 аналогічні фазовимірювачу прототипу. Обчислювач 16 виконаний у вигляді мікроЕОМ для обчислення кутових координат цілі θ, β по обмірюваних фазовимірювачами зсувах фаз Δφ1, Δφ2 за допомогою співвідношень (3), (2). де: β0 - азимутальний кут першого нуля діаграми спрямованості рупора, що передає; а0 - горизонтальний розмір апертури рупора, що передає; λ - довжина хвилі. Для забезпечення однозначності визначення азимутального кута цілі необхідно, щоб у робочому азимутальному секторі 2β0 розміщувалося не більше двох інтерференційних пелюстків діаграми спрямованості системи двох рупорів середньої антени. Ширина інтерференційного пелюстка системи двох рупорів середньої антени, рознесених по горизонталі на відстань а, визначається таким співвідношенням 2Db 2 = arcsin l , a (8) де: а - горизонтальний розмір кожного рупора середньої антени. З зіставлення співвідношень (7), (8) очевидно, що для забезпечення однозначності визначення азимутального кута цілі β достатньо вибрати горизонтальний розмір а0 апертури рупора, що передає, у півтора рази більше горизонтального розміру а приймальних рупорів. При цьому в головному пелюстку діаграми спрямованості антени, що передає, буде розміщуватися рівно два інтерференційних пелюстки діаграми спрямованості системи двох рупорів середньої антени, що забезпечує однозначне визначення азимутального кута цілі β у межах половини азимутального сектора. Для підтвердження цього були проведені розрахунки діаграм спрямованості в горизонтальній площині антени, що передає, середньої і нижньої приймальних антен, результати яких надані на фіг. 2. З цього малюнка очевидно, що в межах головного пелюстка діаграми спрямованості антени, що передає, розміщується два інтерференційних пелюстки діаграми спрямованості системи з двох рупорів середньої антени. Трансцендентне рівняння (2) має єдине рішення в межах половини робочого азимутального сектора. Це можна бачити з графіка на фіг. 3, де надана розрахована за формулою (2) залежність зсуву фаз Δφ1 сигналів на входах приймачів середньої і нижньої антен від азимутального кута цілі β. Розрахунки графіків на фіг. 2, 3 проведені за формулами (4), (6), (2) при таких значеннях параметрів антенної системи: довжина хвилі λ=0.1 м; вертикальний розмір апертури в кожного рупора b=5λ; горизонтальний розмір апертури рупора, що передає, а0=15λ; горизонтальний розмір апертури приймальних рупорів а=10λ; довжина приймального рупора в горизонтальній площині - Н Ra=15λ; довжина приймального рупора у вертикальній площині - Е Rb=15λ; рознос сусідніх антен по висоті b=5λ; рознос приймальних рупорів по горизонталі а=10λ. Графік на фіг. 4 виконаний при куті місця θ=0. 5 40133 Динаміка роботи запропонованого пристрою здійснюється так. Передавач 10 формує, а антена, що передає 1, випромінює безупинний синусоїдальний сигнал. Рупори приймальних антен 2, 3, 4 приймають луна-сигнали цілі, що перешкоджають, і прямі сигнали антени, що передає, і обернені завадові відбитки від землі. Завадові сигнали в правому і лівому рупорах кожної приймальної антени однакові по амплітуді і фазі, а луна-сигнали цілі, азимутальний кут якої відмінний від нуля, відрізняються в правому і лівому рупорах по фазі. Вихідні напруги правого і лівого рупорів кожної приймальної антени відраховуються на вході відповідного приймача. В результаті прямі сигнали передавальної антени, що перешкоджають, і обернені завадові відбитки від землі будуть придушені, а луна-сигнал цілі буде виділений на входах приймачів 11, 12, 13. Ці приймачі посилюють лунасигнали цілі і перетворюють їх на проміжну частоту за допомогою загального гетеродина. Перший фазовимірювач 14 вимірює зсув фаз Δφ1 вихідних напруг приймачів 12, 11 середньої і нижньої антен, а другий фазовимірювач 15 - зсув фаз Δφ2 вихідних напруг приймачів 13, 12 верхньої і середньої антен. Обчислювач 16 обчислює ріг місця θ і азимутальный ріг β цілі по обмірюваних значеннях зсувів фаз Δφ1, Δφ2 за допомогою співвідношень (3), (2). Таким чином, запропонований пристрій забезпечує рішення поставленої задачі, усуває відзначені хиби прототипу і дозволяє придушити прямі сигнали передавальної антени, що перешкоджають, і обернені завадові відбитки від землі на входах приймачів, що забезпечує визначення кутових координат цілі в радіолокаторі з безупинним випромінюванням, дозволяє виконати антенну систему без громіздкого екрана розв'язки між антенами і покращує перешкодозахищеність радіолокатора від пасивних перешкод від землі. Джерела інформації: 1. Педак A.M. и др. Справочник по основам радиолокационной техники / Под ред. В.В. Дружинина. М.: Военное издательство, 1967. - С. 48, рис. 1.31 (прототип). 2. Драбкин А.Л., Зузенко В.Л. Антенно-фидерные устройства.. - М.: Сов. радио, 1961. - С. 498, 515. 6 40133 Фіг. 1 Фіг. 2 7 40133 Фіг. 3 8 40133 Фіг. 4 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 9
ДивитисяДодаткова інформація
Назва патенту англійськоюRadar phase meter of angular coordinates with an analogue irradiation
Автори англійськоюPoroshyn Serhiy Mykhailovych, Bakhvalov Valentyn Borysovych
Назва патенту російськоюРадиолокационный фазовый измеритель угловых координат с безостановочным излучением
Автори російськоюПорошин Сергей Михайлович, Бахвалов Валентин Борисович
МПК / Мітки
МПК: G01S 3/14
Мітки: бе3упинним, кутових, координат, радіолокаційний, випромінюванням, фазовий, вимірювач
Код посилання
<a href="https://ua.patents.su/9-40133-radiolokacijjnijj-fazovijj-vimiryuvach-kutovikh-koordinat-iz-be3upinnim-viprominyuvannyam.html" target="_blank" rel="follow" title="База патентів України">Радіолокаційний фазовий вимірювач кутових координат із бе3упинним випромінюванням</a>
Радіолокаційний вимірювач радіальної швидкості
Номер патенту: 40131
Опубліковано: 16.07.2001
Автори: Бахвалов Валентин Борисович, Порошин Сергій Михайлович
МПК: G01S 3/02
Мітки: радіолокаційний, радіальної, вимірювач, швидкості
Формула / Реферат:
Радіолокаційний вимірювач радіальної швидкості, що містить передавач безупинного сигналу з антеною, що передає, приймальну антену, приймач і вимірювач частоти Доплера, який відрізняється тим, що передавач виконаний у виді генератора проміжної частоти fпp і двох помножителей цієї частоти на ціле число N і N+2 відповідно, виходи яких пов'язані з антеною, що передає, до складу приймача додатково включений помножитель проміжної частоти fпp...
Радіолокаційний вимірювач параметрів руху наземних транспортних засобів
Номер патенту: 23871
Опубліковано: 16.10.2000
Автор: Непорада Сергій Миколайович
МПК: G01S 11/00
Мітки: транспортних, радіолокаційний, засобів, наземних, параметрів, вимірювач, руху
Формула / Реферат:
Радиолокационный измеритель параметров движения наземных транспортных средств, содержащий соединенные СВЧ генератор и циркулятор, две приемо-передаю-щие антенны, смеситель, выход которого соединен с входом усилителя доплеровских частот, который через фильтр с фазовой автоподстройкой частот соединен с устройством измерения пройденного пути, скорости и ускорения, отличающийся тем, что выход циркулятора соединен со входом дополнительно...
Радіолокаційний вимірювач кута місця цілі
Номер патенту: 13421
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: вимірювач, кута, радіолокаційний, цілі, місця
Формула / Реферат:
Радиолокационный измеритель угла места цели, содержащий передатчик, приемник, индикатор и приемо-передающую антенну с антенным переключателем, согласно изобретению передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, антенна выполнена в виде вибраторной решетки с плоским металлическим рефлектором, в которой расстояние между вибраторами по высоте равно высоте h подъема нижнего...
Радіолокаційний вимірювач кутової координати цілі
Номер патенту: 17455
Опубліковано: 06.05.1997
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: вимірювач, кутової, цілі, координати, радіолокаційний
Формула / Реферат:
Радиолокационный измеритель угловой координаты цели, содержащий зеркальную антенну типа параболический цилиндр с облучателем в виде вибратора с металлическим контррефлектором, связанную через антенный переключатель с передатчиком периодических импульсных сигналов и приемником, связанным последовательно с индикатором, отличающийся тем, что передатчик выполнен для несинусоидальных импульсных сигналов чередующейся полярности наносекундной...
Спосіб вимірювання кутових координат цілі для наземного секвентного радіолокатора
Номер патенту: 13419
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Родін Олександр Валерійович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: кутових, координат, наземного, спосіб, цілі, радіолокатора, вимірювання, секвентного
Формула / Реферат:
Способ измерения угловых координат цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты и приеме видеоимпульсов эхо-сигнала воздушной цели, отличающийся тем, что излучение и прием осуществляют с помощью одной приемо-передающей вибраторной антенны с плоским металлическим рефлектором, наблюдают принятые видеоимпульсы...
Попередній патент: Радіолокаційний далекомір безупинного випромінювання
Наступний патент: Фазовий далекомір для радіолокатора наведення безупинного випромінювання
Випадковий патент: З'єднувальна муфта з електричними контактами для масляно-повітряної суміші