Пристрій для контролю вібрації машин
Номер патенту: 63146
Опубліковано: 26.09.2011
Автори: Лебедєв Лев Миколайович, Алєксєєнко Максим Станіславович, Дубовик Володимир Григорович

Формула / Реферат
Пристрій для контролю вібрації машин, що містить віброперетворювач, пороговий елемент, блок реєстрації рівнів вібросигналів, блок пам'яті, дисплей, який відрізняється тим, що додатково містить послідовно сполучені елемент АБО, блок затримки, блок захисту, а також другий, третій, четвертий, п'ятий і шостий порогові елементи, два аналізатори спектру, другий віброперетворювач, другий блок реєстрації рівнів вібросигналів, дві схеми керування, два ключових елементи триканальних, а також послідовно сполучені датчик технологічного навантаження та блок визначення навантаження, три виходи якого сполучені з трьома входами блока пам'яті, шість виходів якого сполучені з входами шести порогових елементів, виходи яких сполучені з шістьма входами дисплея та шістьма входами елемента АБО, перший та другий віброперетворювачі сполучені, відповідно, через перший та другий аналізатори спектру з першим та другим блоком реєстрації рівнів вібросигналів, другі входи яких сполучено з виходами, відповідно, першої та другої схем керування, другі виходи яких сполучені, відповідно, з четвертим та п'ятим входами блока пам'яті, треті виходи сполучені, відповідно, з входами першого та другого ключових елементів триканальних, три виходи першого блока реєстрації рівнів вібросигналів сполучені з другими входами першого, другого і третього порогових елементів, а також через перший ключовий елемент триканальний з їх першими входами, три виходи другого блока реєстрації рівнів вібросигналів сполучені з другими входами четвертого, п'ятого і шостого порогових елементів, а також через другий ключовий елемент триканальний з їх першими входами.
Текст
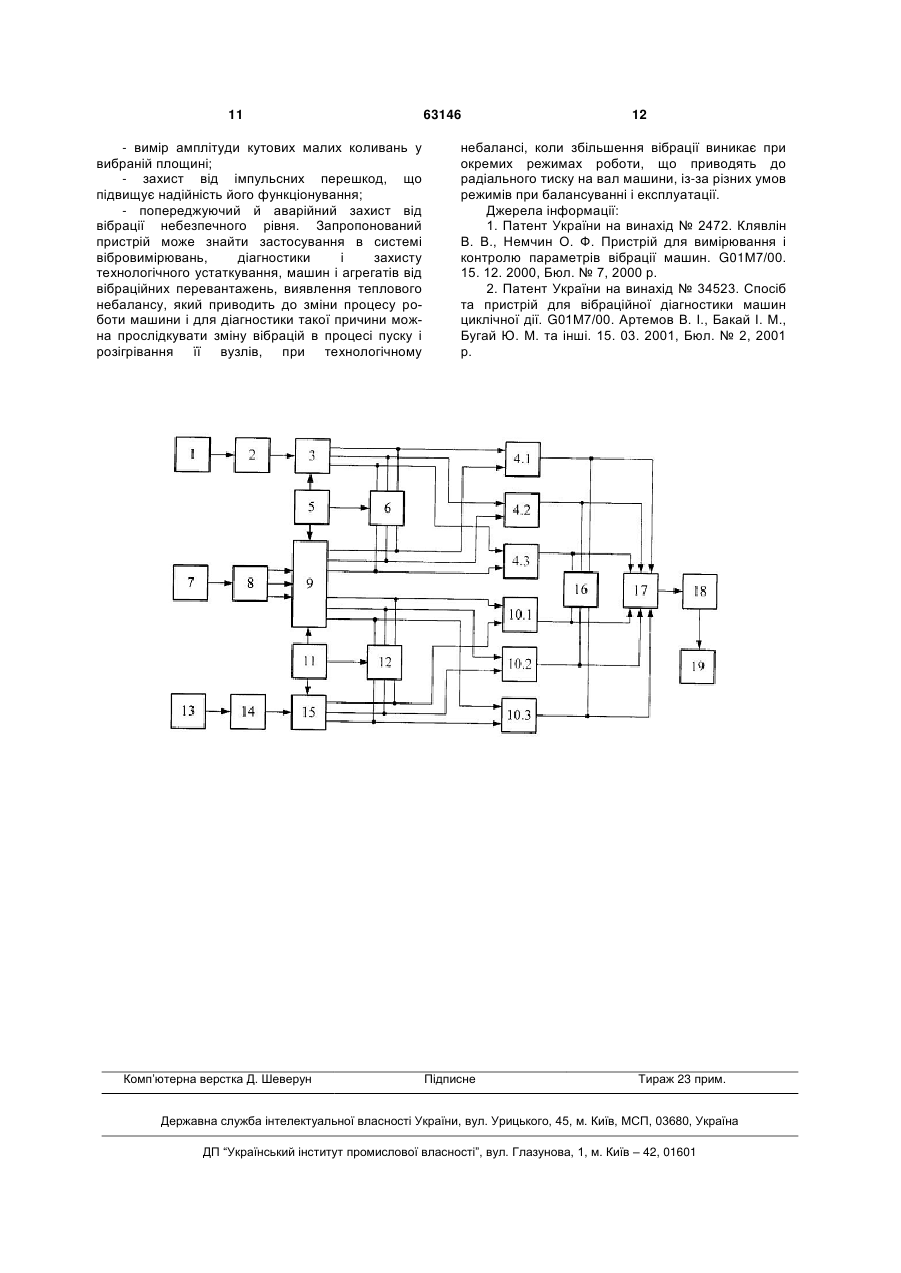
Пристрій для контролю вібрації машин, що містить віброперетворювач, пороговий елемент, блок реєстрації рівнів вібросигналів, блок пам'яті, дисплей, який відрізняється тим, що додатково містить послідовно сполучені елемент АБО, блок затримки, блок захисту, а також другий, третій, четвертий, п'ятий і шостий порогові елементи, два аналізатори спектру, другий віброперетворювач, другий блок реєстрації рівнів вібросигналів, дві схеми керування, два ключових елементи триканальних, а також послідовно сполучені датчик технологічного навантаження та блок визначення навантаження, три виходи якого сполучені з трьо U 2 (19) 1 3 входом блока порівняння, другий вхід якого сполучений із виходом блока пам'яті збереження максимальних значень амплітуд вібросигналів, вихід блока порівняння з'єднаний із реєстратором рівнів вібросигналів, вихід якого у свою чергу з'єднаний із слідкуючим фільтром вібраційних сигналів, вихід останнього зв'язаний з блоком обчислення, а один із входів блока обчислення з'єднаний з блоком пам'яті [2]. Недоліком пристрою є недостатня точність контролю вібрації, пов'язана з відсутністю зв’язку між амплітудою складових несучої частоти вібрації, її гармоніками та технологічним навантаженням машин, і, крім того, недостатня можливість ідентифікувати причини вібраційних змін та порушень. В основу корисної моделі поставлена задача удосконалення відомого пристрою для контролю вібрації машин шляхом введення додаткових елементів, що забезпечує підвищення точності діагностики, встановлюється зв’язок амплітуд складових несучої частоти вібрації та її гармонік в двох напрямках їх дії з технологічним навантаженням машин, що підвищує надійність та строк служби машин та є можливість ідентифікувати причини вібраційних змін та порушень, що дозволяє також оперативно впливати на технологічний процес Вирішення поставленої задачі досягається тим, що пристрій для контролю вібрації машин, що містить віброперетворювач, пороговий елемент, блок реєстрації рівнів вібросигналів, блок пам'яті, дисплей, який відрізняється тим, що додатково містить послідовно сполучені елемент АБО, блок затримки, блок захисту, а також другий, третій, четвертий, п'ятий і шостий порогові елементи, два аналізатори спектру, другий віброперетворювач, другий блок реєстрації рівнів вібросигналів, дві схеми керування, два ключових елементи триканальних, а також послідовно сполучені датчик технологічного навантаження та блок визначення навантаження, три виходи якого сполучені з трьома входами блока пам'яті, шість виходів якого сполучені з входами шести порогових елементів, виходи яких сполучені з шістьма входами дисплея та шістьма входами елемента АБО, перший та другий віброперетворювачі сполучені, відповідно, через перший та другий аналізатори спектру з першим та другим блоком реєстрації рівнів вібросигналів, другі входи яких сполучено з виходами, відповідно, першої та другої схем керування, другі виходи яких сполучені, відповідно, з четвертим та п'ятим входами блока пам'яті, треті виходи сполучені, відповідно, з входами першого та другого ключових елементів триканальних, три виходи першого блока реєстрації рівнів вібросигналів сполучені з другими входами першого, другого і третього порогових елементів, а також через перший ключовий елемент триканальний з їх першими входами, три виходи другого блока реєстрації рівнів вібросигналів сполучені з другими входами четвертого, п'ятого і шостого порогових елементів, а також через другий ключовий елемент триканальний з їх першими входами. Таке виконання пристрою розширює його функціональні можливості, тому що дозволяє ви 63146 4 користовувати його для контролю вібрації машин і механізмів в на різних режимах робіт і їх порівняння з пороговим рівнем у процесі експлуатації, а також підвищує точність і достовірність вимірів. На кресленні представлена структурна схема пристрою для контролю вібрації машин. Пристрій для контролю вібрації машин (кресл.) складається з послідовно сполучених віброперетворювача 1, аналізатора спектру 2, блока 3 реєстрації рівнів вібросигналів, три виходи якого сполучені з другими входами трьох порогових елементів 4.1, 4.2, 4.3, другий вхід сполучено з виходом першої схеми керування 5, третій вихід якої сполучено з входом першого ключового елемента 6 триканального, датчика 7 технологічного навантаження сполученого з блоком 8 визначення навантаження, три виходи якого сполучені з трьома входами блока 9 пам'яті, шість виходів якого сполучені з входами шести порогових елементів 4.1,4.2,4.3,10.1, 10.2, 10.3, четвертий вхід сполучено з другим виходом першої схеми керування 5, п'ятий вхід сполучено з другим виходом другої схеми керування 11, третій вихід якої сполучено з входом другого ключового елемента 12 триканального, послідовно сполучених другого віброперетворювача 13, другого аналізатора спектру 14, блока 15 реєстрації рівнів вібросигналів, три виходи якого сполучені з другими входами трьох порогових елементів 10.1, 10.2, 10.3, другий вхід сполучено з виходом другої схеми керування 11, третій вихід якої сполучено з входом другого ключового елемента 12 триканального, три виходи першого блока 3 реєстрації рівнів вібросигналів сполучені з другими входами трьох порогових елементів 4.1, 4.2, 4.3, а також через перший ключовий елемент 6 триканальний з їх першими входами, три виходи другого блока 15 реєстрації рівнів вібросигналів сполучені з другими входами трьох порогових елементів 10.1, 10.2, 10.3, а також через другий ключовий елемент 12 триканальний з їх першими входами, виходи шести порогових елементів 4.1, 4.2, 4.3, 10.1, 10.2, 10.3 сполучені з шістьма входами дисплея 16 та шістьма входами елемента 17 АБО, вихід якого через блок 18 затримки сполучено з блоком 19 захисту. Віброперетворювачі 1 та 13 призначені для вимірювання вібраційної швидкості, вібраційного і ударного прискорень в встановленому частотному діапазоні, з забезпеченням електричної ізоляції п'єзоелементів і вбудованих підсилювачів від корпусу, в них поєднані високі значення осьової чутливості з низьким рівнем власного шуму, мають низьку чутливість до електромагнітних полів. Віброперетворювачі 1 та 13 встановлюються на машині у двох точках для вимірювання вібрації по різних напрямках для поступальних і кутових коливань. Аналізатори спектру 2, 14 забезпечують аналіз виміряних спектрів методом розкладання загального рівня вібрації на частотні складові за допомогою швидкого перетворення Фур'є (ШПФ). По осі X такого графіка відкладається частота в Гц, по осі Y - амплітуда, яка вимірюється в одиницях вібропереміщення (мм), віброшвидкості (мм/сек), 5 63146 2 віброприскорення ( g ), g 9,807m c . Значення величини амплітуди вібрації відповідає певній частоті на спектрі і визначає ступінь розвитку дефекту. Перетворення Фур'є дозволяє зіставити сигнал, заданий в часовій області, з його еквівалентним представленням в частотній області. Навпаки, якщо відома частотна характеристика сигналу, то зворотне перетворення Фур'є дозволяє визначити відповідний сигнал в часовій області. Швидке перетворення Фур'є - простий алгоритм обчислення для дискретного перетворення Фур'є (ДПФ), при якому представляється сигнал у вигляді суми синусоїд. Як набір вхідних даних для ДПФ доступно кінцеве число відліків N. Основне рівняння для отримання N-точкового ДПФ виглядає таким чином: X(k ) 1 N N1 x(n)e n0 j2 nk / N 1 N N1 x(n)cos( 2nk / N) j sin(2nk / N) n 0 X(k ) - частотний вихід ДПФ в k-ій точці спектру, що знаходиться в діапазоні від 0 до N-1. N - число відліків при обчисленні ДПФ, x(n) n ий відлік в часовій області, де n знаходиться в діапазоні від 0 до N-1. У загальному вигляді рівняння х(n) може бути дійсним або комплексним, а його косинусоїдальні та синусоїдальні компоненти можуть бути виражені в полярних або прямокутних координатах, зв'язок між якими визначається формулою Ейлера: e j cos j sin В аналізаторі спектру 2 для апаратної реалізації алгоритмів ШПФ для цифрового процесора-обробника сигналів (DSP- digital signal processor) можуть бути використані процесори DSP, наприклад, фірми Analog Devices типу ADSP2189M на 16 розрядів, ADSP-21160 SHARC™ на 32 розряди. 6 Блоки 3, 15 реєстрації рівнів вібросигналів забезпечують вимірювання амплітуд сигналів вібрації в трьох піддіапазонах з використанням фільтрів для стандартного діапазону 10 Гц - ікГц, згідно ГОСТ ИСО 10816-1-97, яким визначаються загальні рівні вібрації у вигляді зон рівнів вібрації залежно від класу машин і є базовим документом по вимірюванню і оцінці вібрації машин. Рівні зон виражені в середньоквадратичних значеннях Vr.m.s віброшвидкості в мм/с для машин чотирьох класів, а для оцінки амплітуди вібрацій їх значення розділені на чотири зони. Вибір ширини кожного з трьох піддіапазонів визначається за результатами проведення діагностичних вимірювань показників вібрації, з використанням портативних аналізаторів даних вібрації, наприклад, типу SKF Microlog CMXA50 і програмного забезпечення Machine Analyst. Схеми керування 5, 11 забезпечують режими запису в блок 9 пам'яті при підготовці пристрою до роботи. Ключові елементи 6, 12 триканальні забезпечують замикання, відповідно, трьох виходів блоків 3,15 реєстрації рівнів вібросигналів з виходами блока 9 пам'яті при подачі логічного високого рівня з других виходів схем керування 5, 11. Датчик 7 технологічного навантаження забезпечує вимірювання значень величини технологічного параметра, який найбільш точно віддзеркалює стан навантаження машини при її експлуатації. Технологічним параметром може бути струм електродвигуна, напір насосної установки, частота обертання вала та інші, а для їх вимірювання використовуються, відповідно, датчики струму, датчики тиску, тахометри. Блок 8 визначення навантаження забезпечує виділення з загального можливого значення величини U T технологічного параметра окремих діапазонів значень U i , і присвоєння їм цифрового коду з трьох розрядів, приклад в табл. Таблиця № поз. Значення відносне параметра UT Цифровий код 1. U1 0,1 0,5UT 001 2. U2 0,5 0,75UT 010 3. U3 0,75 0,85UT 011 4. U4 0,85 0,95UT 100 5. U5 0,95 105UT , 101 6. U6 105 115UT , , 110 7. U7 115 150UT , , 111 Він може бути реалізований з використанням порогових елементів для значень U i , а також логічних елементів для одержання цифрового коду з трьох розрядів. Блок 9 пам'яті забезпечує встановлення на шести вихідних ланцюгах значень сигналів, записаних раніше в режимі запису по сигналах схем керування 5, 11 при відповідних цифрових кодах 7 на трьох входах. Кожному з режимів роботи машини, що підлягає діагностуванню та контролю, визначено відповідний рівень амплітуд вібросигналів, згідно з табл. Електричні сигнали, пропорційні відповідному рівню вібросигналів спектра трьох діапазонів частот, подаються з блоків 3 та 15 при запису, і далі використовуються для контролю вібрації машини при експлуатації. Блок пам'яті може бути виконаний з використанням запам'ятовувальних конденсаторів. Дисплей 16 забезпечує відображення значень параметрів вібрації в аварійних режимах, на його вхід подаються сигнали через блок сполучення, який не показаний. Блок 18 затримки забезпечує затримку передачі вхідного сигналу на переключення вихідного сигналу блоку. Час затримки обирається на підставі аналізу імпульсного характеру вібропроцесів для виключення помилкових спрацьовувань блока 19 захисту. Блок 19 захисту забезпечує переключення блоків ланцюгів управління машиною при її відключенні в аварійному режимі і може бути виконаний на ключових елементах, які забезпечують гальванічну розв'язку. Блок живлення пристрою контролю вібрації машин не показаний. Прийняті позначення U in -напруга на і-му виході n-го блока. Працює пристрій наступним чином. Перед проведенням експлуатації пристрою проводиться калібрування з урахуванням передаточних характеристик всіх блоків при робочих режимах машини. Записують значення з трьох виходів блока 3 реєстрації рівнів вібросигналів в блок 9 пам'яті через ключові елементи 6 та 12 триканальні, які замикається за допомогою схем керування 5 та 11, які забезпечують подачу з других виходів логічного високого рівня, відповідно, на ключові елементи 6, 12 триканальні, а також з перших їх виходів - на четвертий та п'яті входи блока 9 пам'яті для забезпечення режиму запису. Ланцюги синхронізації роботи схем керування 5 та 11 не показані. Інтерфейси вводу-виводу в блоці 9 пам'яті також не показані. В робочому режимі після подачі напруги в ланцюги живлення пристрою сигнали з віброперетворювачів 1, 13, пропорційні амплітудним значенням вібрації, при роботі машини подаються, відповідно, на аналізатори спектру 2, 14, які забезпечують аналіз виміряних спектрів методом розкладання загального рівня вібрації на частотні складові за допомогою швидкого перетворення Фур'є, а з їх виходів сигнали подаються на блоки 3, 15 реєстрації рівнів вібросигналів, які вимірюють значення амплітуд сигналів вібрації в трьох піддіапазонах з використанням фільтрів. Три вихідні сигнали блоків 3, 15 подаються на другі входи, відповідно, порогових елементів 4.1,4.2,4.3 та 10.1, 10.2, 10.3, де порівнюються з сигналами на перших входах цих елементів, що надходять від блока 9 пам'яті. Порогові елементи 4.1, 4.2, 4.3 мають характеристики 63146 8 Ui4 0 , якщо Ui3 Ui9, Ui4 1 , якщо Ui3 Ui9 . Порогові елементи 10.1, 10.2, 10.3 мають характеристики i U10 0 , якщо i i U15 Ui9 , U10 1 , якщо i U15 Ui9 . Сигнали з датчика 7 технологічного навантаження подаються на блок 8 визначення навантаження, на виході якого, залежно від значення навантаження, встановлюється цифровий код, в відповідності з табл., який подається на блок 9 пам'яті, з виходів якого знімаються значення рівнів сигналів вібрації машини, записані при підготовці пристрою до роботи при режимах, встановлених при наладці, та подаються на входи порогових елементів 4.1, 4.2,4.3, 10.1, 10.2, 10.3. При появі сигналу рівня логічної одиниці Ui4 1 на одному або кількох виходах він передається через елемент 17 АБО на блок 18 затримки, який забезпечує переключення вихідного сигналу з логічного нуля в одиницю з затримкою, а також на дисплей 16 для візуалізації і ідентифікації перевищення значення вібрації. З виходу блока 18 затримки сигнал подається на блок 19 захисту, який забезпечує відключення машини. Вібраційний стан машин оцінюють шляхом вимірювання середнього квадратичного значення віброшвидкості, основні вібраційні параметри, наприклад, переміщення, швидкість, прискорення, пікові і середні квадратичні значення зв'язані певними математичними залежностями. Визначивши, шляхом вимірювань, залежність віброшвидкості від часу, її середнє квадратичне значення vr.m.s можна підрахувати таким чином: T v r.m.s. T 1 v 2 ( t )dt , 0 v(t) - функція віброшвидкості від часу; T - період вибірки, який повинен бути набагато більшим періоду будь-якого з основних частотних компонентів, що містяться в v(t) . Значення вібраційного прискорення, швидкості a , v , S , j 1 2,...,n , або переміщення (відповідно j j j ) визначаються в результаті аналізу вібраційних спектрів як функції кутової частоти ( 1, 2,...,n ). Якщо відомі середні квадратичні значення амплітуд віброшвидкості v1, v 2,...,vn , або середні квадратичні значення амплітуд прискорення a1,a2,...,an , то пов'язане з ним і таке, що характеризує коливальний процес, середнє квадратичне значення віброшвидкості визначається виразом v r.m.s. (a1 / 1)2 (a2 / 2 )2 ... (an / n )2 2 2 2 2 2 2 S1 1 S22 ... Sn n v1 v 2 ... v n 2 2 2 За наявності тільки двох значних складових вібрації, що визначають биття середнього квадра 9 63146 тичного значення віброшвидкості між максимальним v max і мінімальним v min значеннями, середнє квадратичне значення вібрації приблизно виражене у вигляді 2 2 vr.m.s. (vmax vmin ) / 2 . Якщо відома кутова частота віброшвидкості синусоїдальної складової, то розмах як подвоєну амплітуду вібропереміщення визначають так: v v v S f 2000 f 2 1000 f 2 450 f f f f , де S f - розмах вібропереміщення, мкм; vf середнє квадратичне віброшвидкості на частоті, мм/с; f 2f - кутова частота. значення Сигнал на виході порогових елементів 4.1, 4.2, 4.3 та 10.1, 10.2, 10.3 з'являється у разі зносу підшипників і вібрації вала, порушенні центрівки осей вала, порушенні балансування приводного механізму, в відповідності до ГОСТ ИСО 10816-197 і залежить від потужності машин та області використання. Вимірювальна система пристрою передбачає можливість калібрування всього вимірювального тракту і має незалежні виходи для під'єднування додаткових аналізаторів. Кріплення віброперетворювачів 1, 13 має бути таким, щоб воно не змінювало вібраційні характеристики машини. Вимоги до апаратури, призначеної для вимірювання середнього квадратичного значення вібрації в діапазоні 10-1000 Гц, визначаються по ГОСТ ИСО 2954. Застосування введених до складу пристрою аналізаторів спектру 2, 14, п'ятьох порогових елементів, схем керування 5, 11, ключових елементів 6, 12 триканальних, датчика 7 технологічного навантаження, блока 8 визначення навантаження, елемента 17 АБО, блока 18 затримки, блока 19 захисту дозволяє підвищити ефективність і надійність функціонування машин, а також забезпечує відключення їх при аварійних ситуаціях при виникненні підвищення вібрації. Це дозволяє уникнути технологічних перевантажень, підвищити продуктивність робочих механізмів. Пристрій дозволяє контролювати технологічний небаланс в машинах, який може виникати в робочому режимі, наприклад для вентиляторів, при частково відкритих заслінках, що підвищує рівень вібрації із-за порушень балансування, а також гістерезис небалансу на робочому колесі, обумовлений наявністю пружного елементу, який під дією відцентрових сил при номінальній частоті обертання зміщується. Сили від небалансу впливають на робоче колесо і починають його згинати, воно змінює свою форму так, що центр мас однієї частини робочого колеса зміщується у бік вже наявного небалансу. У результаті, небаланс починає зростати ще більше, ще більше збільшуючи вигин. При цьому відбувається характерна зміна спектрального складу вібросигналів - різко збільшується 10 амплітуда другої гармоніки оборотної частоти внаслідок неправильного монтажу підшипників і це повторюються двічі за один оборот вала. Пристрій забезпечує підвищення точності контролю вібрації, за рахунок зв’язку між амплітудою складових несучої частоти вібрації, її гармонік з технологічним навантаженням машин з врахуванням параметрів просторової вібрації в різних напрямках. Для оцінки технічного стану і діагностики дефектів машин пристрій дозволяє використовувати метод контролю спектру вібросигналу для виявлення, разом з діагностикою підшипників, великої кількості інших дефектів. Для кожного нового типу устаткування, рівень порогу сильного дефекту, багато в чому, залежить від віддаленості елементу з дефектом від віброперетворювачів. Місця для установки віброперетворювачів слід вибирати так, щоб він знаходився якомога ближче до зони зубозачеплення редуктора. На шляху проходження реєстрованих вібросигналів від зони зубозачеплення до окремого віброперетворювача бажано не мати розділу різних середовищ і особливо зазорів. Пристрій дозволяє контролювати рівні вібрації в електричних машинах змінного струму, де треба враховувати сили електромагнітної природи, що мають свої власні частоти: - перша сила пов'язана з частотою живлячої мережі і має пік на частоті 50 Гц. - друга генерує коливання з частотою прояву електромагнітних процесів в міді і сталі, має пік на частоті 100 герц, проявляється у вібрації сердечника і обмоток всіх машин змінного струму; - третя пов'язана з частотою обертання електромагнітного поля в зазорі електричної машини і є частка від ділення частоти живильної мережі на число пар полюсів; - четверта сила пов'язана з ковзанням в асинхронних машинах; - п'ята викликається наявністю зубцевопазової структури в зазорі електричної машини, що завжди приводить, при частоті обертання ротора з частотою 50 Гц, до збільшених вібрацій у вертикальному напрямі з частотою в 100 Гц. Основна ознака того, що контрольований дефект має електромагнітну причину, то це миттєве зникнення його ознак в спектрі вібрації після відключення електричної машини від мережі. Діагностика причин підвищеної вібрації в електричних машин повинна проводитися при можливо більшому навантаженні двигуна. Таким чином, введені нові блоки та функціональні зв'язки до запропонований пристрій забезпечують: - розширення функціональних можливостей і підвищення надійності пристрою при застосуванні для контролю вібрації машин і механізмів у процесі їхньої експлуатації; - підвищення точності і достовірності вимірів; - підвищення якості обробки сигналу; - вимір амплітуди поступальної складової гармонійних просторових коливань у вибраному напрямку стосовно заданої точки вузла, у якій вибирається початок координат; 11 - вимір амплітуди кутових малих коливань у вибраній площині; - захист від імпульсних перешкод, що підвищує надійність його функціонування; - попереджуючий й аварійний захист від вібрації небезпечного рівня. Запропонований пристрій може знайти застосування в системі вібровимірювань, діагностики і захисту технологічного устаткування, машин і агрегатів від вібраційних перевантажень, виявлення теплового небалансу, який приводить до зміни процесу роботи машини і для діагностики такої причини можна прослідкувати зміну вібрацій в процесі пуску і розігрівання її вузлів, при технологічному Комп’ютерна верстка Д. Шеверун 63146 12 небалансі, коли збільшення вібрації виникає при окремих режимах роботи, що приводять до радіального тиску на вал машини, із-за різних умов режимів при балансуванні і експлуатації. Джерела інформації: 1. Патент України на винахід № 2472. Клявлін В. В., Немчин О. Ф. Пристрій для вимірювання і контролю параметрів вібрації машин. G01М7/00. 15. 12. 2000, Бюл. № 7, 2000 р. 2. Патент України на винахід № 34523. Спосіб та пристрій для вібраційної діагностики машин циклічної дії. G01М7/00. Артемов В. І., Бакай І. М., Бугай Ю. М. та інші. 15. 03. 2001, Бюл. № 2, 2001 р. Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of vibration of machines
Автори англійськоюDubovyk Volodymyr Hryhorovych, Lebediev Lev Mykolaiovych, Alekseienko Maksym Stanislavovych
Назва патенту російськоюУстройство для контроля вибрации машин
Автори російськоюДубовик Владимир Григорьевич, Лебедев Лев Николаевич, Алексеенко Максим Станиславович
МПК / Мітки
МПК: G01M 7/00
Мітки: вібрації, контролю, пристрій, машин
Код посилання
<a href="https://ua.patents.su/6-63146-pristrijj-dlya-kontrolyu-vibraci-mashin.html" target="_blank" rel="follow" title="База патентів України">Пристрій для контролю вібрації машин</a>
Пристрій для контролю вібрації машин
Номер патенту: 62783
Опубліковано: 12.09.2011
Автори: Дубовик Володимир Григорович, Сівцова Тамара Олександрівна, Лебедєв Лев Миколайович
МПК: G01M 7/00
Мітки: контролю, вібрації, пристрій, машин
Формула / Реферат:
Пристрій для контролю вібрації машин, що містить віброперетворювач, пороговий елемент, блок реєстрації рівнів вібросигналів, блок пам'яті, дисплей, який відрізняється тим, що додатково містить послідовно сполучені елемент АБО, блок затримки, блок захисту, а також другий і третій порогові елементи, датчик технологічний, аналізатор спектра, схему керування, ключовий елемент триканальний, блок визначення навантаження, вхід якого сполучено з...
Пристрій контролю рівня вібрації для роторних машин
Номер патенту: 59229
Опубліковано: 10.05.2011
Автор: Шантир Антон Сергійович
МПК: G01H 1/00
Мітки: машин, роторних, рівня, вібрації, пристрій, контролю
Формула / Реферат:
Пристрій контролю рівня вібрації для роторних машин, що містить лінійний вимірювальний перетворювач, перетворювач середньоквадратичного значення, аналого-цифровий перетворювач та пороговий пристрій, вихід якого з'єднаний зі входом індикатора, який відрізняється тим, що додатково містить селектор регулярної складової вимірювального сигналу, другий перетворювач середньоквадратичного значення, другий пороговий пристрій та другий індикатор,...
Пристрій для вимірювання і контролю параметрів вібрації машин
Номер патенту: 32472
Опубліковано: 15.12.2000
Автори: Немчин Олександр Федорович, Клявлін Валерій Володимирович
МПК: G01M 7/02
Мітки: пристрій, контролю, параметрів, вібрації, вимірювання, машин
Текст:
...(частоті обертання вала й ін.). З вихо ду фільтрів 3 сигнал надхо дить на входи інтегратора 4, який перетворює сигнал вібродатчика 1, що пропорційний віброприскоренню, у сигнал, що пропорційний віброшвидкості, який далі надходить на вхід блока усереднення 5. Блок усереднення 5 забезпечує одержання постійної напруги, пропорційної віброшвидкості. Час усереднення обирається на підста ві аналізу імпульсного ха рактеру вібропроцесів для...
Спосіб та пристрій для вібраційної діагностики машин циклічної дії

Номер патенту: 34523
Опубліковано: 15.03.2001
Автори: Ковалко Михайло Петрович, Єгер Дмитро Олександрович, Немчин Олександр Федорович, Литвин Володимир Михайлович, Артемов Володимир Іванович, Фреюк Тарас Михайлович, Яценко Олег Володимирович, Гончарук Володимир Якович, Бакай Ігор Михайлович, Рибчич Ілля Йосипович, Зарубін Юрій Олександрович, Бугай Юрій Миколайович, Малев Валерій Іванович, Чернишов Віктор Григорович
МПК: G01M 7/00
Мітки: вібраційної, діагностики, спосіб, дії, циклічної, пристрій, машин
Текст:
...хід якого зв'я заний із блоком 6 обчислення наступної за лежності : Уд - дійсний рівень амплітуди вібрації в місці виміру; Ум - максимальний рівень амплітуди вібрації в місці виміру. Один із входів блока 6 обчислення з'єднаний із блоком 3 пам'яті для збереження максимальних значень амплітуд вібросигналів, а один із виходів блока 6 з'єднаний із входом дисплея 7. Пристрій працює наступним чином. У блоці 4 здійснюється вимір, реєстрація та...
Пристрій для вимірювання параметрів вібрації машин
Номер патенту: 19897
Опубліковано: 25.12.1997
Автори: Поліщук Олег Федорович, Саприкін Сергій Олексійович, Бойко Михайло Васильович, Божко Олександр Євгенович
МПК: G01M 7/02
Мітки: пристрій, параметрів, вимірювання, машин, вібрації
Текст:
...между осями вибропреобразователей 1. Параметр А характеризует амплитуду малых угловых колебаний и измеряется устройством с помощью измерителя 4. Поступательные колебания S(t) с частотой f (в направлении осей вибропреобразователей 1) точки С (не показана) , расположенной между вибропреобразователями 1 на расстоянии 1/2 от каждого из них, приближенно определяются формулой S(t) = | [ s t ( t ) + S 2 (t)] = - Bcos(Ut где 1 В = ^ ^ + A^cosq»,)...
Попередній патент: Спосіб лікування хронічного генералізованого пародонтита початкового та легкого ступеня тяжкості у хворих на червоний плоский лишай типової форми
Наступний патент: Лампа світлодіодна з регульовною кольоровою температурою
Випадковий патент: Спосіб формування контактів до приладів на гарячих електронах на основі напівпровідників типу а в