Спосіб врівноважування шпинделя приводу валків кліті прокатного стану
Номер патенту: 67591
Опубліковано: 15.06.2004
Автори: Стеч Володимир Станіславович, Каушанський Ігор Борисович, Кожевніков Георгій Васильович, Бражнов Володимир Федорович, Барабаш Андрій Володимирович, Стрельников Миколай Миколайович, Єлецьких Володимир Іванович, Литвинов Володимир Ілліч

Формула / Реферат
Спосіб врівноважування шпинделя приводу валків кліті прокатного стану, який включає створення компенсуючого зусилля від плунжера гідравлічного циліндра, у робочу порожнину якого подають рідину під тиском і який взаємодіє зі шпинделем у центрі його ваги, який відрізняється тим, що у залежності від величини зсуву центра ваги шпинделя від геометричної осі обертання для одержання компенсуючого зусилля змінюють тиск рідини в робочій порожнині гідравлічного циліндра врівноважування відповідно до формули:

де ![]() - вага шпинделя;
- вага шпинделя;
![]() - діаметр плунжера гідроциліндра;
- діаметр плунжера гідроциліндра;
![]() - маса обертових частин шпинделя;
- маса обертових частин шпинделя;
![]() - кутова швидкість шпинделя;
- кутова швидкість шпинделя;
![]() - величина зсуву центра ваги шпинделя від геометричної осі обертання.
- величина зсуву центра ваги шпинделя від геометричної осі обертання.
Текст
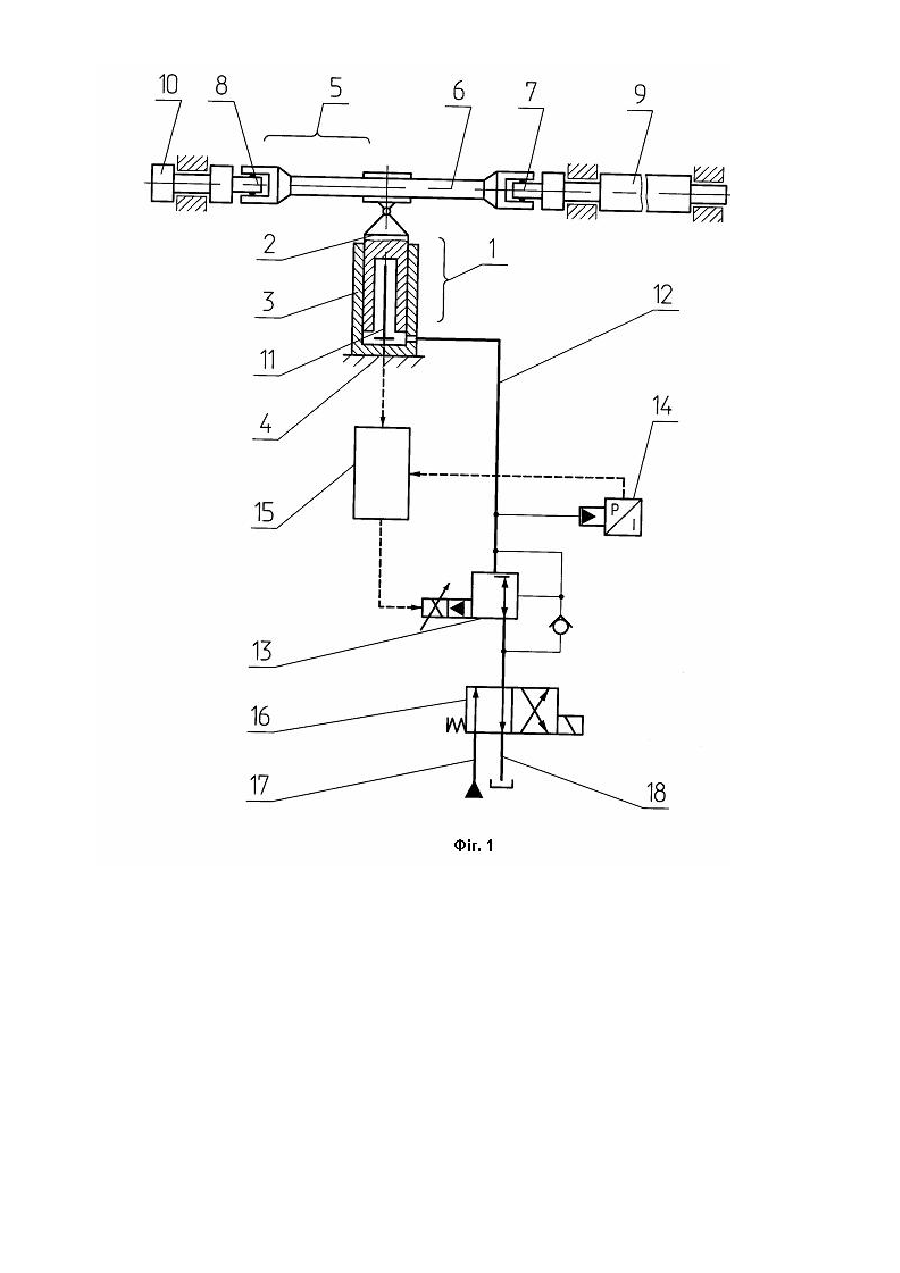
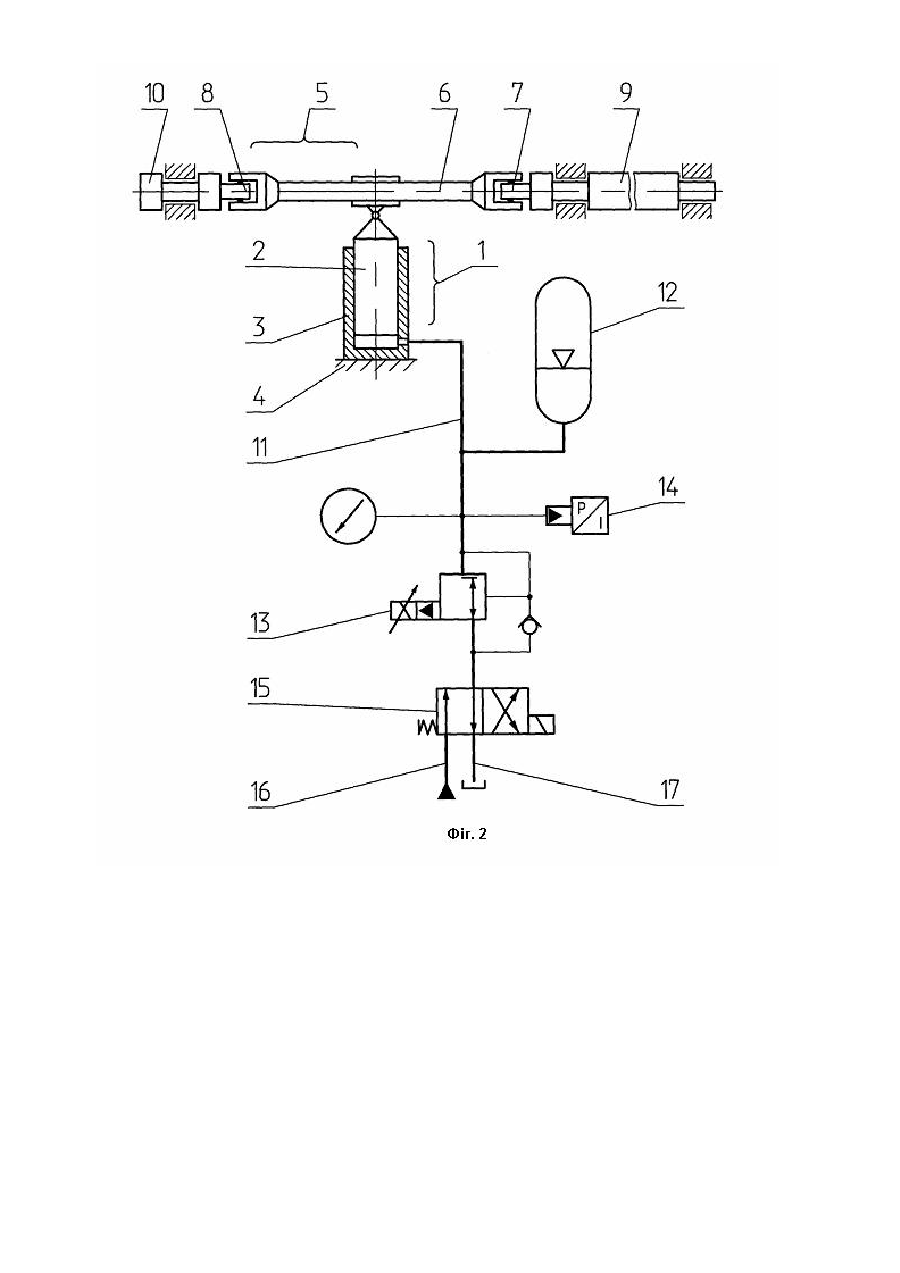
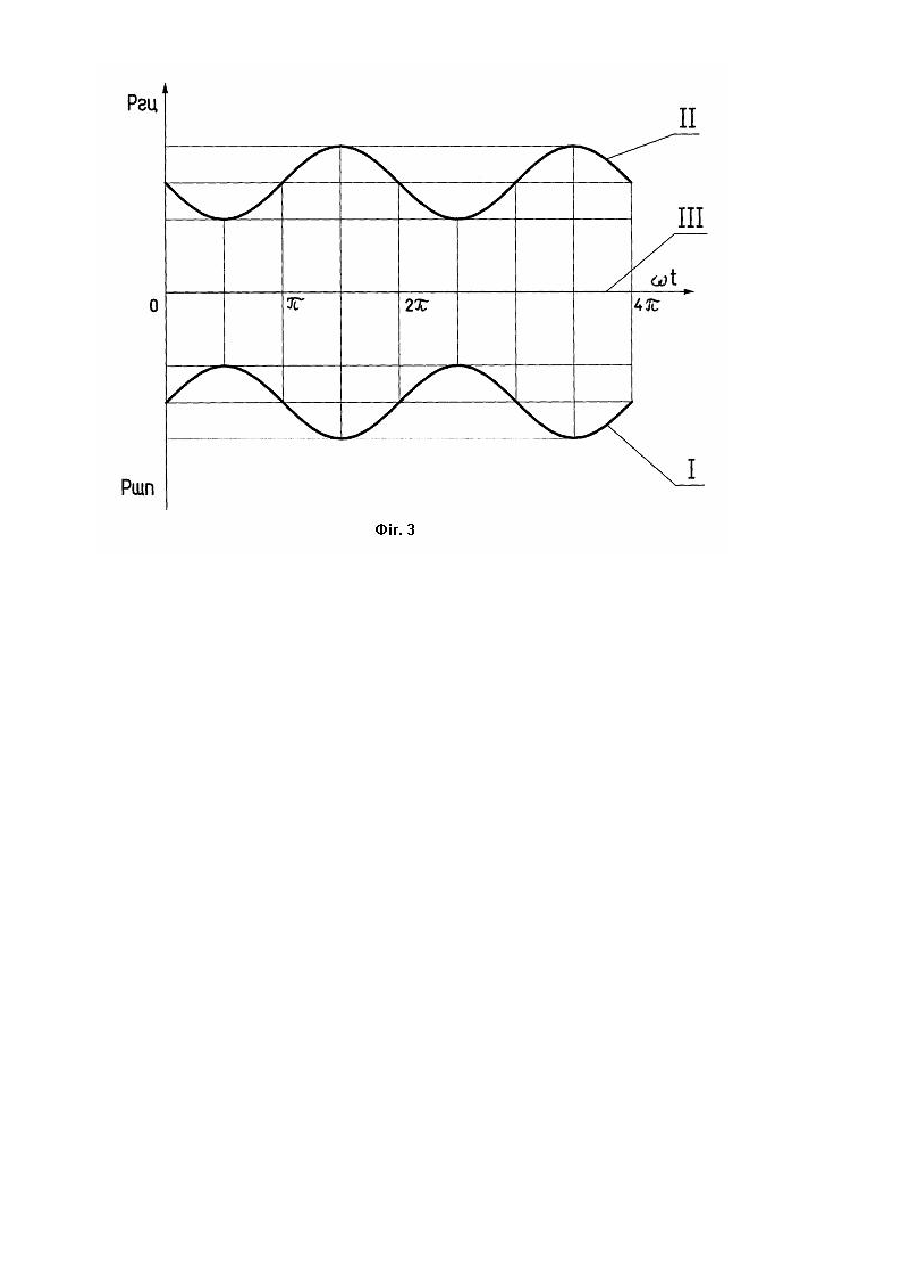
Винахід відноситься до галузі металургійного машинобудування і може бути використаним для створення врівноважуючих систем шпинделів головних приводів робочих клітей прокатних станів. Відомий спосіб врівноважування шпинделів (Механическое оборудование прокатних цехов. Королев А.А., М., 1976 г., с. 170-171), у якому шпинделі врівноважуються за допомогою гідроциліндрів, штоки яких спираються на підшипникові вузли, кожен з котрих встановлено у центрі ваги шпинделя, а корпуса циліндрів жорстко пов'язані з рамою пристрою, що врівноважує. У цьому способі для врівноважування шпинделів створюється постійне зусилля, що компенсує статичну складову (вагу вузлів). Однак при зсуві центра ваги шпинделя відносно осі його обертання при зносі вкладишів універсальних шарнірів виникають перемінні динамічні навантаження, які можуть бути скомпенсовані тільки при додатку до шпинделів більших статичних зусиль, ніж потрібно для компенсації їхньої ваги. При цьому величина переврівноважування вибирається заздалегідь, виходячи з майбутнього максимального зносу вкладишів. Наслідок цього величина переврівноважування при роботі з новими вкладишами буде необгрунтоване велика. У якості прототипу обраний спосіб врівноважування шпинделя привода валків прокатного стану, що випливає з пристрою для врівноважування шпинделя привода валків прокатного стану по авторському посвідченню СРСР № 1811927, В21В 35/14. Пристрій, що реалізує цей спосіб, містить наступні елементи: встановлений на підставі через пружину плунжерний гідравлічний циліндр; - гідророзподільник, з'єднаний магістраллю з робочою порожниною гідроциліндра; - гідроакумулятор; - напірну і зливальну магістралі; - важільний зв'язок поміж плунжером гідророзподільника і корпусом гідроциліндра. У цьому способі при зсуві центра ваги шпинделя від осі його обертання і виникненні додаткових динамічних навантажень плунжерний гідравлічний циліндр за рахунок пружини зміщається нагору або вниз і через важільний зв'язок зміщає гідророзподільник, відкриваючи або закриваючи магістралі, що зв'язують його з робочою порожниною гідроциліндра. При цьому незалежно від зсуву гідроциліндра і його плунжера тиск у робочій порожнині підтримується постійним з високим ступенем точності. При цьому виключається переврівноважування або недоврівноважування статичних сил. Недоліки прототипу: незважаючи на високу точність врівноважування статичних сил (ваги шпинделя), у способі по прототипу неможливо компенсувати виникаючі динамічні навантаження при зносі вкладишів шарнірів, які знижують довговічність окремих елементів привода валків кліті прокатного стану і привода в цілому. До основи винаходу поставлена задача створення способу врівноважування шпинделя привода валків кліті прокатного стану, що забезпечує високу довговічність окремих елементів привода і привода валків кліті прокатного стану в цілому. Ця задача вирішується за рахунок технічного результату, який полягає в зрівноважуванні статичних і динамічних сил, що діють на шпиндель за рахунок створення в робочій порожнині гідроциліндра врівноважування перемінного тиску рідини, величина якого знаходиться в строгій відповідності з величиною зсуву центра мас шпинделя при його оберті. Для досягнення вищевказаного результату в способі врівноважування шпинделя привода валків кліті прокатного стану, що включає створення компенсуючого зусилля від плунжера гідравлічного циліндра, у робочу порожнину якого подають рідину під тиском і який взаємодіє зі шпинделем у центрі його ваги, відповідно з винаходом, в залежності від величини зсуву центра ваги шпинделя від геометричної осі обертання для одержання компенсуючого зусилля змінюють тиск рідини в робочій порожнині гідравлічного циліндра врівноважування відповідно до формули: R= 4 ×G p × D2 пл + 4 × m × w 2 × l 0 sin w × t 2 p × Dпл , де: G - вага шпинделя; Dпл - діаметр плунжера гідроциліндра; m - маса обертових частин шпинделя; w - кутова швидкість шпинделя; lo - величина зсуву центра ваги шпинделя від геометричної осі обертання. У результаті порівняльного аналізу пропонованого способу врівноважування шпинделя привода валків з прототипом встановлено, що вони мають наступні загальні ознаки: створення компенсуючого зусилля від плунжера гідравлічного циліндра, у робочу порожнину якого подають рідину під тиском; - взаємодія плунжера гідроциліндра зі шпинделем у центрі його ваги; і відмінні ознаки: - у залежності від величини зсуву центра ваги шпинделя від геометричної осі обертання для одержання компенсуючого зусилля змінюють тиск рідини в робочій порожнині гідравлічного циліндра врівноважування відповідно до формули: R= 4 ×G + 4 × m × w 2 × l 0 sin w × t , 2 p × Dпл де: G - вага шпинделя; Dпл- діаметр плунжера гідроциліндра; M - маса обертових частин шпинделя; w - кутова швидкість шпинделя; lo - величина зсуву центра ваги шпинделя від геометричної осі обертання. Таким чином, пропонований спосіб врівноважування шпинделя привода валків кліті прокатного стану має нову операцію по зміні тиску в робочій порожнині гідроциліндра врівноважування. Між відмінними ознаками і технічним результатом, що досягається, існує причинно-наслідковий зв'язок. p × D2 пл Завдяки тому, що тиск у робочій порожнині гідроциліндра врівноважування змінюють по вищенаведеній залежності, стало можливим зрівноважити у вертикальній площині всі сили, що діють на шпиндель привода валків , у тому числі сили ваги шпинделя (1-ий доданок у формулі), і динамічні сили, що виникають у результаті руху зміщених від центра обертання мас шпинделя (2-ий доданок у формулі). Таким чином, використання для врівноважування шпинделів пропонованого способу дозволяє підвищити довговічність окремих елементів привода і привода валків кліті прокатного стану в цілому. Виключення з вищевказаної сукупності відмінних ознак хоча б одної з них не забезпечує рішення поставленої задачі. Технічне рішення, що заявляється, не відомо з рівня техніки, тому воно є новим. Пропоноване технічне рішення має винахідницький рівень, тому що спосіб врівноважування шпинделя привода валків кліті прокатного стану, розглянутий вище, для фахівця не є очевидним з рівня техніки. Технічне рішення, що заявляється, промислове застосовано, тому що його технічне і технологічне виконання не представляє труднощів. По цьому рішенню виконаний робочий проект для прокатних клітей стану 2000 Новоліпецького металургійного комбінату. Таким чином, пропонованому технічному рішенню може бути надана правова охорона, тому що воно є новим, має винахідницький рівень і промислове застосовано, що відповідає всім критеріям винаходу. Винахід пояснюється кресленнями, на яких зображене наступне: фіг. 1 - схема зрівноважуючого пристрою шпинделя привода валків кліті прокатного стану з автоматизованим керуванням величиною тиску в робочій порожнині гідроциліндра врівноважування; фіг.2 - схема зрівноважуючого пристрою шпинделя привода валків кліті прокатного стану з гідравлічним акумулятором, що забезпечує необхідну зміну величини тиску в робочій порожнині гідроциліндра врівноважування. Зрівноважуючий пристрій містить гідроциліндр 1 з плунжером 2 і корпусом 3, встановленим стаціонарно на основі 4. Плунжер 2 зв'язаний зі шпиндельним вузлом 5, що включає шпиндель 6, шарніри 7, 8. Шпиндельний вузол з'єднує прокатний валок 9 із шестеренним валком 10. У плунжерному гідроциліндрі ївстанволено датчик лінійних переміщень 11 плунжера 2. Робоча порожнина гідроциліндра 1 зв'язана з магістраллю 12, яка з'єднує гідроциліндр 1 з редукційним гідроклапаном 13 з пропорційним електричним керуванням і датчиком тиску 14 з електричним вихідним сигналом, який подають у блок керування 15. З блоком керування 15 зв'язані також електричним ланцюгом датчик лінійних переміщень 11 і редукційний гідроклапан 13. Магістраль 12 з'єднана через гідророзподільник 16 з напірною 17 і зливальною 18 магістралями. Врівноважуючий пристрій працює наступним чином. У робочу порожнину гідроциліндра 1 подається рідина під тиском, величина якого заздалегідь (по відомій вазі шпинделя) встановлюється за допомогою редукційного клапана 13. Величина цього тиску дорівнює 4×G R1 = , (1) 2 p × Dпл де: G - вага шпинделя; Dпл - діаметр плунжера гідроциліндра. Таким чином, вага шпинделя 6 скомпенсована зусиллям, прикладеним до нього від плунжера 2, що дозволяє розвантажити шарніри 7, 8 і опори прокатного валка 9 і шестеренного валка 10. Однак, при обертанні шпинделя 6 виникає динамічна складова через незбалансованість шпинделя після деякого зносу шарнірів і зсуву центра ваги від осі обертання. У цьому випадку до ваги шпинделя додається або віднімається (у залежності від фази обертання) сила, рівна: Fg = m × w × l 0 × sin w × t, (2) де: Fg - динамічна складових сил, що діють на шпиндель; m - маса обертових частин шпинделя; w - кутова швидкість обертання шпинделя; lо - зсув центра мас шпинделя. Інформація про зсув центра мас шпинделя l0 передається на плунжер 2 і виміряється датчиком 11, сигнал від якого подається на блок керування 15. Після обробки сигналу в блоці керування формується вихідний сигнал, який керує редукційним клапаном 13, що дозволяє змінити тиск у робочій порожнині гідроциліндра відповідно до формули: 4×G R2 = × m × w 2 × l 0 × sin wt, (3) p × D2 пл де: Р2 - динамічна складова тиску. Сумарний тиск рідини, що подається в робочу порожнину гідроциліндра, визначиться формулою: R = 4 ×G + 4 × m × w 2 × l 0 × sin w × t , (4) 2 p × D2 p × Dпл пл Графіки зусиль від ваги елементів і динамічних сил, також зусиль врівноважування від гідроциліндра і сумарне зусилля (~ 0) приведені на фіг. 3 (відповідно І, II, III). У якості другого приклада реалізації способу врівноважування шпинделя може бути розглянута схема на фіг.2. Механічна частина системи (поз. 1-10) містить ті ж елементи, що і у попередньому прикладі. Гідросистема містить магістраль 11, що з'єднує робочу порожнину гідроциліндра 1 з гідроакумулятором 12, редукційним гідроклапаном 13 із пропорційним електричним керуванням, і датчиком 14 тиску з електричним вихідним сигналом, що використовується для керування редукційним клапаном. Магістраль 11 з'єднана через гідророзподільник 15 з напірною 16 і зливальною 17 магістралями. Врівноважування статичних і динамічних сил, що діють на шпиндель привода валків кліті прокатного стану по другому прикладі відбувається наступним чином. У робочу порожнину гідроциліндра 1 подається рідина під тиском, величина якого заздалегідь (по відомій вазі шпинделя 6) встановлюється за допомогою редукційного клапана 13. Таким чином, вага шпинделя 6 скомпенсована зусиллям, прикладеним до нього з боку плунжера 2, що дозволяє розвантажити шарніри 7,8 і опори прокатних валків 10. Компенсація динамічної складової (її поява описана в попередньому прикладі) здійснюється в пристрої по другому виконанню наступним чином. Зсув центра мас шпинделя і, отже, осі його обертання приводить до переміщення плунжера 2, що викликає зміну об'єм рідини в робочій порожнині гідроциліндра 1 і гідроакумулятора 12, і у свою чергу викликає зміну тиску в порожнинах цих пристроїв. Для компенсації вертикальної складової динамічної сили 9 (див. формулу 2) за рахунок автоматичної зміни тиску в порожнині гідроциліндра, об'єм акумулятора повинний вибиратися по формулі: é -1 1 1 - ù 2 ö n æ ö nú 4mw l 0 ÷ 4mw l 0 ÷ p 2 - ç p1 + ú , (5) V0 = Dпл l 0 p 3 12 ç 2 êç pDпл ÷ pD2 ÷ ú пл ø è ø è ê ú ë û де: Р3 - тиск зарядки акумулятора; n - показник політропа. У зрівноважуючому пристрої не виникає резонансних явищ, завдяки незначній енерційності робочої рідини в гідросистемі. Таким чином, пропонований спосіб врівноважування може бути реалізований доступними засобами і дозволяє компенсувати статичних і динамічні складових сил, які діють на шпиндель, що забезпечує точне його врівноважування і збільшує довговічність окремих вузлів привода і привода валків кліті прокатного стану в цілому. 1 êæ n êç p 2
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for balancing the drive shaft of rolling mill rolls
Автори англійськоюYeletskykh Volodymyr Ivanovych, Lytvynov Volodymyr Illich, Stech Volodymyr Stanislavovych, Kozhevnikov Heorhii Vasyliovych, Barabash Andrii Volodymyrovych, Kaushanskyi Ihor Borysovych, Brazhnov Volodymyr Fedorovych
Назва патенту російськоюСпособ уравновешивания шпинделя привода валков клети прокатного стана
Автори російськоюЕлецких Владимир Иванович, Литвинов Владимир Ильич, Стеч Владимир Станиславович, Кожевников Георгий Васильевич, Барабаш Андрей Владимирович, Каушанский Игорь Борисович, Бражнов Владимир Федорович
МПК / Мітки
МПК: B21B 35/14
Мітки: кліті, врівноважування, шпинделя, приводу, прокатного, стану, спосіб, валків
Код посилання
<a href="https://ua.patents.su/6-67591-sposib-vrivnovazhuvannya-shpindelya-privodu-valkiv-kliti-prokatnogo-stanu.html" target="_blank" rel="follow" title="База патентів України">Спосіб врівноважування шпинделя приводу валків кліті прокатного стану</a>
Зрівноважувальний пристрій шпинделя приводу валків кліті прокатного стану
Номер патенту: 65924
Опубліковано: 15.04.2004
Автори: Литвинов Володимир Ілліч, Бражнов Володимир Федорович, Стеч Володимир Станіславович, Кожевніков Георгій Васильович, Барабаш Андрій Володимирович, Єлецьких Володимир Іванович, Каушанський Ігор Борисович
МПК: B21B 35/14
Мітки: прокатного, шпинделя, стану, пристрій, зрівноважувальний, валків, кліті, приводу
Формула / Реферат:
1. Зрівноважувальний пристрій шпинделя приводу валків кліті прокатного стану, що містить підставку з встановленим на ній плунжерним гідравлічним циліндром, гідророзподільник, з'єднаний магістраллю з робочою порожниною гідроциліндра, гідроакумулятор, напірну і зливальну магістралі, який відрізняється тим, що він оснащений редукційним гідроклапаном і датчиком тиску, при цьому гідроакумулятор з'єднаний безпосередньо з робочою порожниною...
Пристрій для приводу вертикальних валків універсального прокатного стану
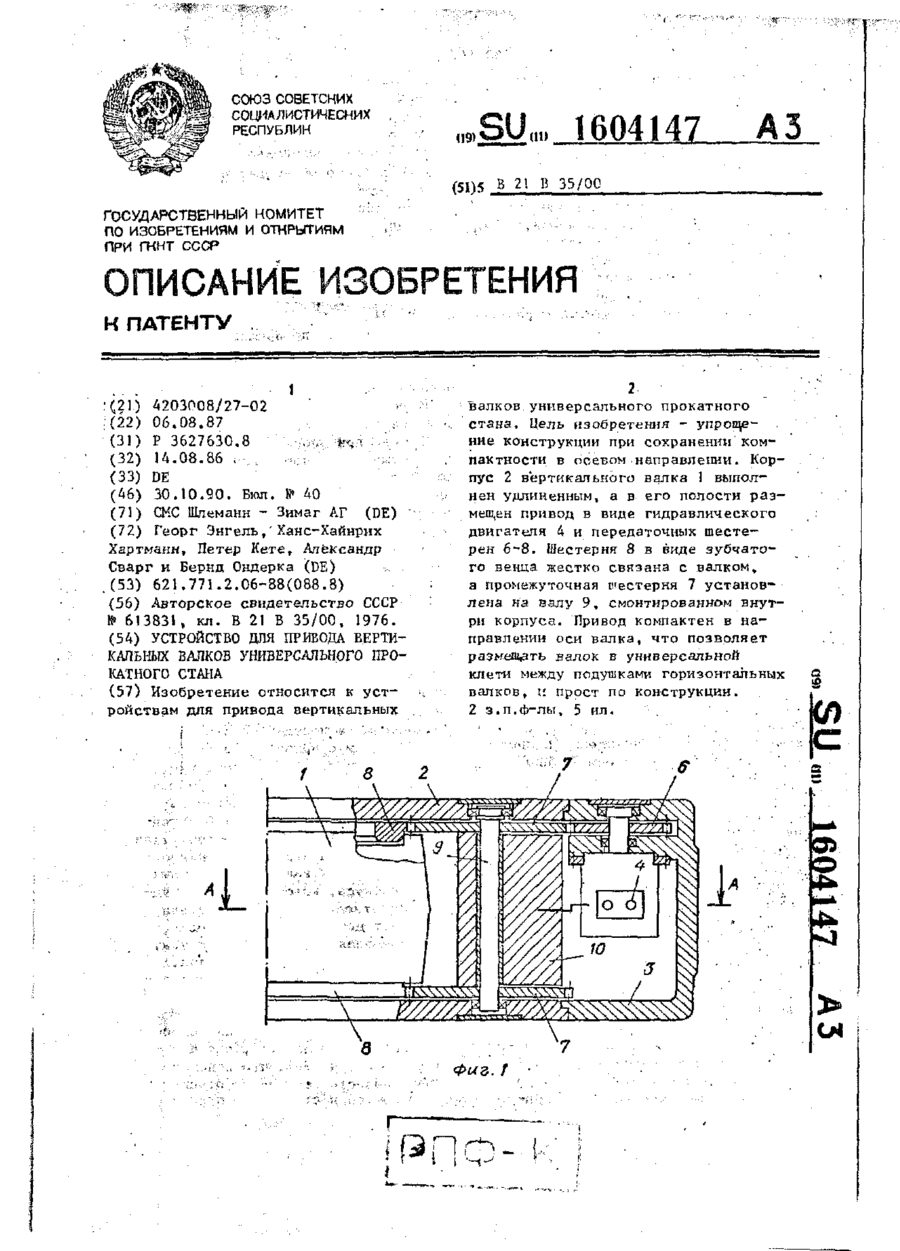
Номер патенту: 6036
Опубліковано: 29.12.1994
Автори: Ханс-Хайнріх Хартманн, Алєксандр Сварг, Георг Енгель, Петер Кете, Бернд Ондерка
МПК: B21B 35/00
Мітки: стану, універсального, валків, пристрій, приводу, прокатного, вертикальних
Формула / Реферат:
1. Устройство для привода вертикальных валков универсального прокатного стана, в котором вертикальные валки установлены на несущих осях в корпусах и связаны с приводным средством, отличающееся тем, что, с целью упрощения конструкции при сохранении компактности в осевом направлении, приводное средство выполнено в виде гидравлического двигателя и цилиндрической зубчатой (фрикционной) передачи к валку, размещенных внутри корпуса, который...
Шарнірна головка шпинделя прокатного стану
Номер патенту: 14021
Опубліковано: 25.04.1997
Автори: Батура Володимир Миколайович, Каретний Зіновій Петрович, Данилов Леонід Іванович, Сорокін Олександр Михайлович, Погребняк Микола Прокопович, Алексєєнко Георгій Якович, Урін Юрій Леонідович
МПК: B21B 35/14
Мітки: стану, прокатного, шарнірна, шпинделя, головка
Формула / Реферат:
Шарнирная головка шпинделя прокатного стана, содержащая подвижные относительно одна другой наружную и внутреннюю обоймы, составляющие шарнирную часть с расположенной по ее оси пружиной, и муфтовую часть с клиновым устройством выборки зазоров в соединении с хвостовиком рабочего валка, герметизирующую перегородку между шарнирной и муфтовой частями, отличающаяся тем, что, с целью повышения надежности и сокращения простоев стана при...
Пристрій для привода вертикальних валків універсального прокатного стану
Номер патенту: 6040
Опубліковано: 29.12.1994
Автори: Бернд Ондерка, Алєксандр Свагр, Петер Кете, Ханс-Хайнріх Хартманн, Георг Енгель
Мітки: привода, стану, пристрій, універсального, валків, вертикальних, прокатного
Формула / Реферат:
Формула изобретения1. Устройство для привода вертикальных валков универсального прокатного стана, в котором вертикальные валки установлены на подшипниковых опорах на несущих осях в корпусах и связаны с приводным средством, отличающееся тем, что, с целью уменьшения габаритов устройства, приводное средство выполнено в виде гидродвигателя, размещенного внутри несущей оси и связанного с валком через смонтированные на нем ведущее зубчатое...
Проводка кліті штабового прокатного стану
Номер патенту: 12947
Опубліковано: 28.02.1997
Автори: Євгиненко Ігор Олександрович, Каретний Зіновій Петрович, Цимбал Василь Йосипович
МПК: B21B 39/14
Мітки: проводка, прокатного, стану, штабового, кліті
Формула / Реферат:
(57)1. Проводка клети полосового прокатного стана, содержащая установленные на станине верхние и нижние прижимные упоры.отличающаяся тем, что, по меньшей мере, один из прижимных упоров выполнен в виде сектора цилиндра, обращенного цилиндрической поверхностью внутрь проводки и шарнирно установленного на станине со смещением центра тяжести в сторону от клети.2. Проводка клети полосового прокатного стана по п.1, отличающаяся тем,...
Попередній патент: Реагент для обробки промивальних рідин
Наступний патент: Спосіб лікування бронхітів, бронхіальної астми та простудних захворювань
Випадковий патент: Полімерна протонпровідна композиція для паливних елементів