Спосіб визначення меж зони безіскрової роботи колекторних електричних машин постійного струму
Номер патенту: 33503
Опубліковано: 15.02.2001
Автори: Колб Андрій Антонович, Іванов Олексій Борисович, Бешта Олександр Степанович
Текст
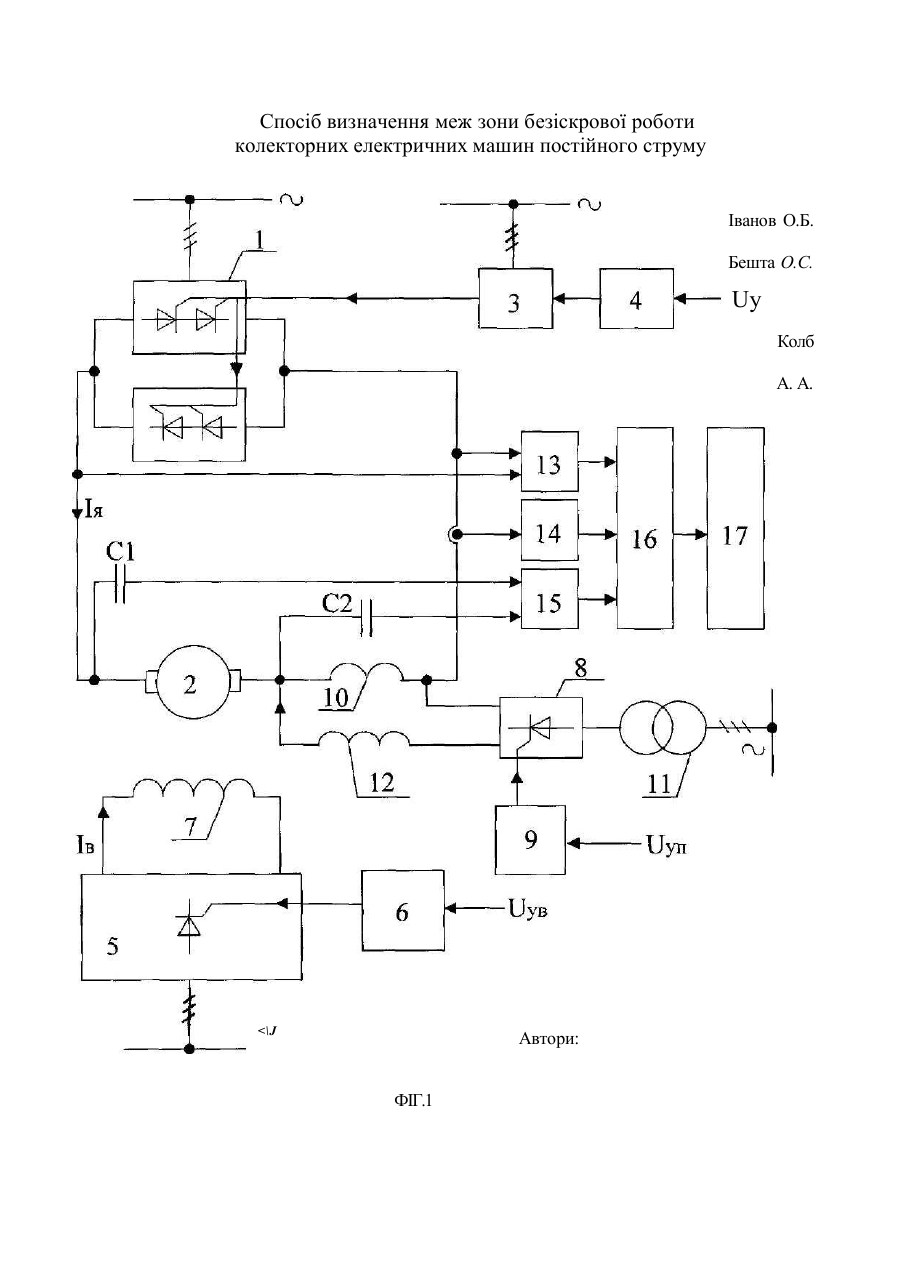
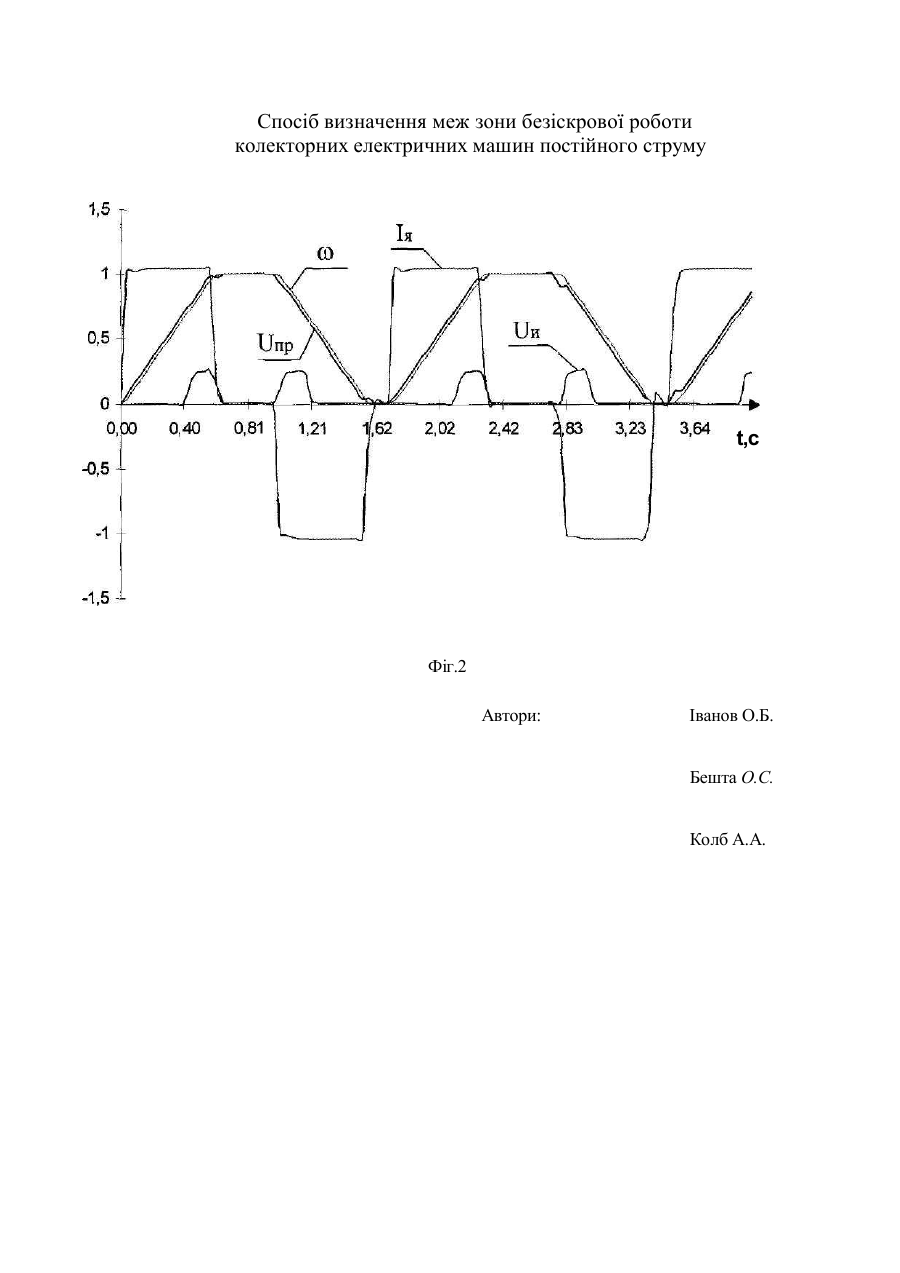
9903 /f б МПК НО2К 13/14 Спосіб визначення меж зони безіскрової роботи колекторних електричних машин постійного струму. Винахід відноситься до колекторних електричних машин постійного струму і може бути використаний при експериментальному налагодженні комутації методом зон безіскрової роботи великих і крупних електричних машин постійного струму переважно після ремонту, а також може бути використаний для знов виготовлених машин. Досвід показує, що як знову виготовлені великі і крупні електричні машини, так і машини після ремонту завжди потребують налагодження комутації, що полягає в регулюванні додаткових полюсів зміною числа витків їхньої обмотки і величини повітряного зазору в магнітному ланцюзі додаткових полюсів. Відомий спосіб визначення меж зони безіскрової роботи [Костенко М.П., Пиотровский Л.М. Электрические машины. Часть первая.- М.: Энергия, 1964., стр.239-242] шляхом збільшення і зменшення сили, що намагнічує, (підживлення-відживлення) обмотки додаткових полюсів, що включає установку і підключення випробовуваної машини і контрольновимірювальних приладів на іспитовому стенді, навантаження її до необхідних значень струму якоря, підживлення-відживлення обмотки її додаткових полюсів від регульованого джерела постійної напруги, реєстрацію інтенсивності іскріння, струму якоря, струму підживленнявідживлення і напруги на якорі, побудову меж зони безіскрової роботи. При підживленні-відживленні крізь обмотку додаткових полюсів протікає додатковий струм, що відповідно складається або віднімається з струмом якоря. Це наводить до виникнення небалансної ЕРС у комутованих секціях, у результаті чого виникає іскріння під щітками. Змінюючи струм підживлення-відживлення, домагаються при різних навантаженнях (значеннях струму якоря) іскріння під щітками визначеної інтенсивності в балах, наприклад, 1,0 або lV4 . Тільки з'явиться іскріння заданої інтенсивності, реєструють за допомогою вимірювальних приладів або датчиків струм якоря, величину струму підживлення-відживлення, напругу на якорі або частоту обертання. Результати досвіду підживлення-відживлення обмотки додаткових полюсів для різноманітних значень струму якоря зображують у виді графіків таким чином, що по осі абсцис відкладають струм якоря, а по осі ординат - значення струму підживлення-відживлення у відносних одиницях при визначеному рівні іскріння. З'єднуючи отримані таким способом точки двома кривими (однієї - для підживлення, інший - для відживлення), одержують межи зони безіскрової роботи або визначеної інтенсивності іскріння. Характер цієї зони (її ширина, нахил середньої лінії, відстань від середньої лінії до осі абсцис) дозволяє судити про причини іскріння, визначити необхідне число витків обмотки додаткових полюсів і величину повітряного зазору між якорем і додатковим полюсом із метою поліпшення комутації і зменшення іскріння. При реалізації відомого способу випробовувану машину навантажують (задають необхідне значення струму якоря) у режимі короткого замикання або, наприклад, методом взаємного навантаження [Коварский Е.М., Янко Ю.И. Испытание электрических машин. - М.: Энергоатомиздат, 1990., рис.3.1 и 3.2, стр.75]. У обох випадках кінематично з'єднують випробовувану машину з навантажувальним агрегатом. Причому у випадку взаємного навантаження навантажувальна машина повинна бути близька по потужності і конструктивному виконанні до випробовуваної, а краще використовувати дві однакові машини [Коварский Е.М., Янко Ю.И. Испытание электрических машин. - М.: Энергоатомиздат, 1990., стр.74]. У режимі короткого замикання досвіди проводять з ослабленим магнітним потоком головних полюсів і, отже, при напрузі на якорі значно менше номінального, що значно збільшує погрішність у визначенні меж зони безіскрової роботи. Крім того, кінематичне з'єднання електричних машин в умовах ремонту широкого спектра машин різноманітної потужності і я. конструктивного виконання потребує складного парку іспитового устаткування, різнотипних навантажувальних машин, що трудоемко і тривало в часу і практично виключає можливість іспиту крупних машин. Все це є суттєвими недоліками відомого засобу. Відомий також спосіб [Коварский Е.М., Янко Ю.И. Испытание электрических машин. М: Энергоатомиздат, 1990., рис.6.6, стр.209-212] найбільше близький до запропонованого, що включає установку і підключення випробовуваної машини до джерела живлення на іспитовому стенді, кінематичне з'єднання її з навантажувальним агрегатом, підключення контрольновимірювальних приборів, навантаження випробовуваної машини до необхідних значень струму якоря, підживлення-відживлення обмотки додаткових полюсів постійним струмом від регульованого джерела постійної напруги, реєстрацію інтенсивності іскріння, струму якоря, струму підживлення-відживлення, напруги на якорі (або частоти обертання), побудову меж зони безыскровой роботи. Незважаючи на можливість використання автоматизованої системи іспитів [Коварский Е.М., Янко Ю.И. Испытание электрических машин. - М: Энергоатомиздат, 1990. рис.9.3, стр.283.] цьому засобові властиві зазначені вище недоліки. У основу винаходу поставлено задачу удосконалення способу визначення меж зони безіскрової роботи колекторних електричних машин постійного струму, у якому створенням інших режимів навантаження випробовуваної машини забезпечуються необхідні струмові навантаження при номінальному потоку головних полюсів без кінематичного з'єднання випробовуваної машини з навантажувальним агрегатом, і за рахунок цього підвищується точність визначення меж зони безіскрової роботи, включаючи і крупні машини, виключається необхідність використання навантажувального агрегату і скорочується тривалість іспитів, що сприяє збільшенню пропускної спроможності іспитових станцій (цехів) і скороченню парку іспитового устаткування. Поставлена задача вирішується тим, що у відомому способі визначення меж зони безіскрової роботи колекторних електричних машин постійного струму, що включає установку і підключення випробовуваної машини і контрольно вимірювальних приборів на іспитовому стенді, навантаження її до необхідних значень струму якоря, підживлення-відживлення обмотки її додаткових полюсів від допоміжного регульованого джерела постійної напруги, реєстрацію інтенсивності іскріння, струму якоря, струму підживлення-відживлення і напруги на якорі, побудову меж зони безіскрової роботи, відповідно до винаходу, попередньо задають перехідний режим, що відповідає необхідному значенню струму якоря, а потім при цьому значенні струму якоря роблять багаторазово розгін і гальмування випробовуваної машини в режимі трьохперіодної діаграми швидкості й одночасно, змінюючи величину струму підживлення-відживлення, реєструють при кожному значенні струму якоря всі параметри, необхідні для побудови меж зони безіскрової роботи. Запропонований спосіб пояснюється схемами, поданими на фіг.1 і фіг.2. На фіг. 1 зображена принципова схема пристрою для реалізації запропонованого способу. На фіг.2 показані у відносних одиницях криві струму якоря Ія, частоти обертання СО, напруги на якорі Ш, інтенсивності іскріння UH, отримані шляхом цифрового моделювання по відомих методиках динамічних процесів, що відбуваються при реалізації трьохперіодної діаграми швидкості для одержання необхідного стумового навантаження при розгоні і гальмуванні випробовуваної машини. На фіг.1 показаний реверсивний керований перетворювач 1, наприклад тиристорний, вихід якого залучений до якорю 2 випробовуваної електричної машини, система З автоматичного регулювання з регуляторами струму якоря і частоти обертання із зворотнім зв'язком по ЕРС або напрузі, вихід якої залучений до входу тиристорного перетворювача 1, а вхід залучений до виходу задатчика інтенсивності 4, призначеного для для регулювання прискорення випробовуваної машини, тиристорный перетворювач 5 із системою керування 6, залучений до обмотки збудження 7 випробовуваної машини, реверсивний тиристорний перетворювач 8 із системою керування 9, вихід якого залучений до обмотки 10 додаткових полюсів, а вхід залучений до мережі через трансформатор 11, що знижує, дросель 12, включений послідовно в ланцюг обмотки додаткових полюсів і призначений для згладжування пульсацій струму якоря, датчик 13 напруги на якорі, датчик 14 струму якоря, індикатор 15 інтенсивності іскріння, наприклад фотоелектронний, блок поєднання (інтерфейс) 16, автоматизований вимірювальний комплекс 17, виконаний, наприклад, на базі ЕОМ. У якості тиристорних перетворювачів для живлення якоря 2, обмотки збудження 7 і підживлення-відживлення обмотки 10 додаткових полюсів можуть бути використані, наприклад, комплектні тиристорні перетворювачі, застосовувані в автоматизованому електроприводі для живлення відповідно обмотки якоря й обмотки збудження, що постачаються відповідними системами автоматичного регулювання. Спосіб визначення меж зони безіскрової роботи колекторних електричних машин постійного струму реалізується таким чином. Випробовувану машину встановлюють на іспитовому стенді, підключають обмотку якоря 2, обмотку збудження 7 і обмотку додаткових полюсів 10 відповідно до керованих перетворювачів 1, 5, і 12, підключають також датчик напруги 13, датчик струму 14 і індикатор іскріння 15 до вимірювального комплексу 17. Попередньо задають режим динамичного навантаження, забезпечуючий необхідне значення струму якоря в перехідних режимах пуску і гальмування випробовуваної машини, при котрому потрібно визначити межи зони безіскрової роботи, наприклад, Ія = 0.5 Іян, де Іян - номінальний струм якоря. Необхідне значення струму якоря може бути встановлено одним із відомих способів, наприклад, зміною рівня обмеження вихідного сигналу регулятора частоти обертання системи автоматичного регулювання 3, або завданням відповідного прискорення за допомогою задатчика інтенсивності 4. Потім на вхід системи автоматичного регулювання 3, або задатчика інтенсивності 4 подають однополярні прямокутні імпульси, амплітуда яких відповідає, наприклад, номінальній частоті обертання випробовуваної машини, і тим самим багаторазово реалізують трьохперіодну діаграму швидкості, що включає розгін, усталений рух і гальмування випробовуваної машини. При цьому в процесі розгону і гальмування електричної машини струм якоря автоматично підтримується постійним на заданому рівні, як показано на фіг.2. Одночасно змінюючи величину струму підживлення-відживлення, реєструють інтенсивність іскріння, струм якоря, струм підживлення-відживлення і напругу на якорі (параметри, необхідні для побудови меж зони безіскрової роботи). Багатократне повторення досліду при тому самому значенні струму якоря підвищує точність визначення меж зони безіскрової роботи, при визначенні яких беруть середні значення величин. Потім повторюють зазначений процес реалізації трьохперіодної діаграми швидкості випробовуваної машини, підживлення-відживлення і реєстрації параметрів, необхідних для побудови меж зони безіскрової роботи, для інших значень струму якоря, рівних, наприклад, 0.75 Іян, 1.0 Іян, 1.25 Іян, и.т.д. до необхідного значення. При прискорених іспитах можуть бути вибрані інші значення струму якоря. Після обробки результатів проведених досвідів будують межи зони безіскрової роботи або визначеної інтенсивності іскріння. На фіг. 2 як приклад показані у відносних одиницях криві струму якоря Ія, частоти обертання випробовуваної електричної машини со, напруги на якорі й інтенсивності іскріння UH, віднесеної до базового значення UH.6 = 2 бали. Причому індикатор (датчик) іскріння повинний бути попередньо візуально проградуірований, щоб одержати залежність вихідної напруги датчика іскріння від інтенсивності іскріння в балах. Приведені на фіг.2 залежності, отримані шляхом цифрового моделювання перехідних режимів при пуску і гальмуванні випробовуваного двигуна, відповідають динамічному струму якоря, рівному номінальному (стале відносне значення струму якоря дорівнює одиниці) і постійному по величині струму підживлення (на малюнку не показаний), рівному 5 % від номінального. Фіксуючи, наприклад, за допомогою вимірювального комплексу на базі ЕОМ струм якоря, частоту обертання (або напругу перетворювача), струм підживлення-відживлення й інтенсивність іскріння, можна визначити межи зони при заданому струмі якоря. Для підвищення точності визначення меж зони безіскрової роботи повторюють досвіди при тому самому значенні струму якоря декілька разів і беруть середні значення величин. Попередньо задаючи режим динамічного навантаження, що відповідає іншому значенню струму якоря і повторюючи режим розгону і гальмування випробовуваної машини можна визначити межи зони для інших значень струму якоря і побудувати залежність ± A In = f (Ія) при визначеної кутовій швидкості електричної машини. Аналіз залежностей фіг.2 показує, що запропонований засіб дозволяє визначити межі зони безіскрової роботи випробовуваної машини при номінальному магнітному потоку додаткових полюсів і без кінематичного з'єднання її з навантажувальним агрегатом. Спосіб визначення меж зони безіскрової роботи колекторних електричних машин постійного струму Іванов О.Б. Бешта О.С. Uy Колб А. А.
ДивитисяДодаткова інформація
Назва патенту англійськоюDefinition method for sparkless areas of operation of dc collector electric machines
Автори англійськоюIvanov Oleksii Borysovych, Beshta Oleksandr Stepanovych, Kolb Andrii Antonovych
Назва патенту російськоюСпособ определения зоны безискровой работы коллекторных электрических машин постоянного тока
Автори російськоюИванов Алексей Борисович, Бешта Александр Степанович, Колб Андрей Антонович
МПК / Мітки
МПК: H02K 13/14
Мітки: визначення, машин, меж, безіскрової, спосіб, роботи, електричних, струму, зони, постійного, колекторних
Код посилання
<a href="https://ua.patents.su/6-33503-sposib-viznachennya-mezh-zoni-beziskrovo-roboti-kolektornikh-elektrichnikh-mashin-postijjnogo-strumu.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення меж зони безіскрової роботи колекторних електричних машин постійного струму</a>
Пристрій для перевірки міжвиткових замикань в полюсних котушках електричних машин постійного струму
Номер патенту: 30157
Опубліковано: 15.11.2000
Автор: Ганчук Степан Дмитрович
МПК: G01R 31/02
Мітки: машин, міжвиткових, замикань, електричних, перевірки, пристрій, постійного, струму, котушках, полюсних
Формула / Реферат:
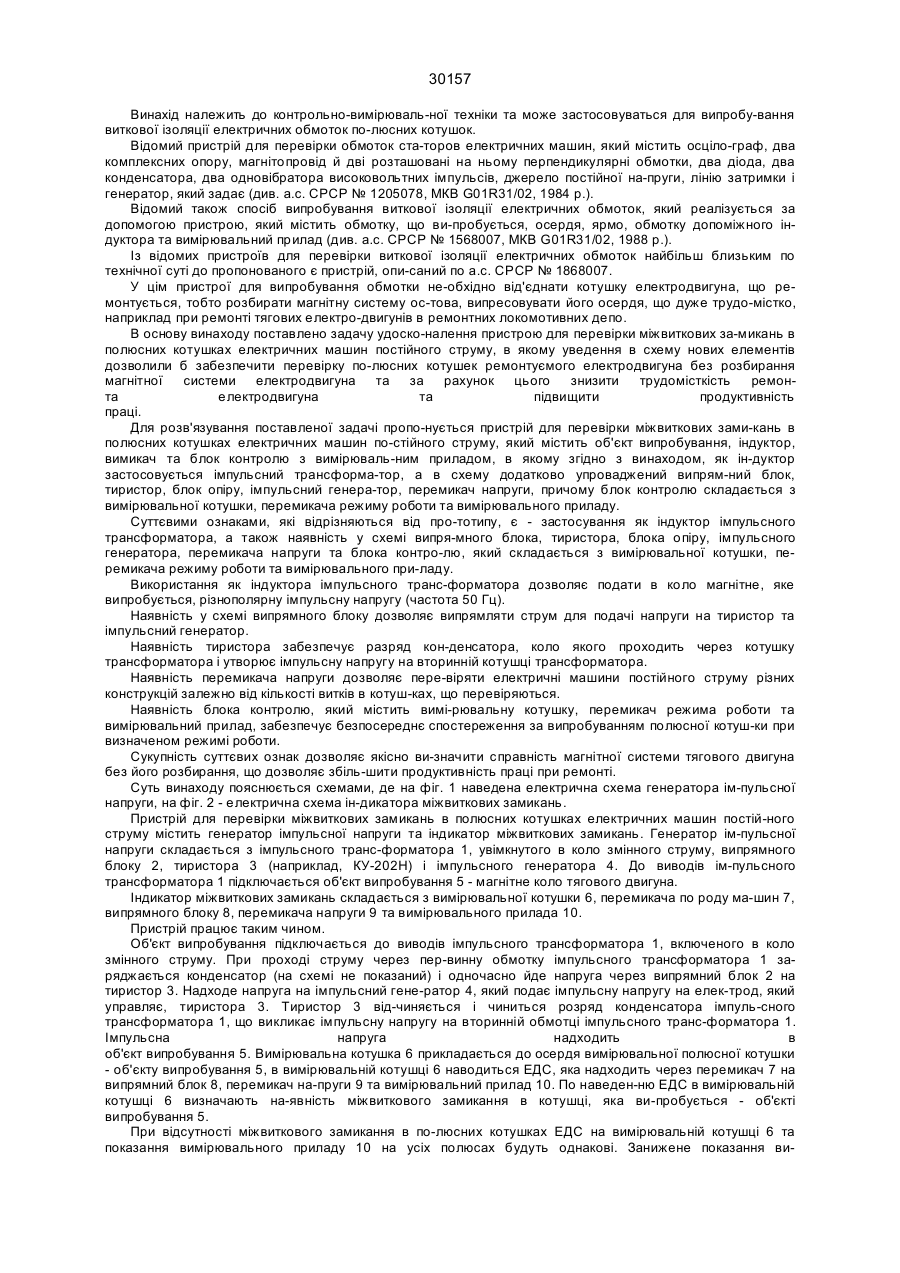
Пристрій для перевірки міжвиткових замикань в полюсних котушках електричних машин постійного струму, який містить об'єкт випробування, індуктор, вимикач і блок контролю з вимірювальним приладом, який відрізняється тим, що як індуктор використовується імпульсний трансформатор, і додатково містить випрямний блок, тиристор, блок опору, імпульсний генератор, перемикач напруги, а блок контролю складається з вимірювальної котушки, перемикача режима...
Спосіб вмикання електричних машин змінного струму в мережу
Номер патенту: 9908
Опубліковано: 30.09.1996
Автор: Конюхов Олександр Іванович
МПК: H02J 3/00
Мітки: спосіб, вмикання, струму, машин, змінного, мережу, електричних
Формула / Реферат:
(57) 1. Способ включения электрических машин переменного тока в сеть, согласно которому статорные обмотки двух электрических машин включают пофазнопоследовательно, подают на пофазнолоследовательно соединенные электрические машины напряжение сети, результирующий вектор которого меньше суммы номинальных напряжений двух электрических машин, а после разворота электрических машин на каждую из них подают номинальное напряжение путем образования...
Спосіб включення електричних машин змінного струму в мережу
Номер патенту: 12731
Опубліковано: 28.02.1997
Автори: Гоголюк Петро Федорович, Конюхов Олександр Іванович
МПК: H02J 3/00
Мітки: струму, електричних, спосіб, включення, мережу, змінного, машин
Текст:
...пониженном напряжении каждая из них включается на полное напряжение путем об- 50 разования нулевой точки со стороны нулевых выводов электрических машин , согласно изобретению, после разворота одной из электрических машин до подсинхрон-ьой скорости одновременно с образование!т 55 нулевой точки электрических машин в цепь нулевой точки, вводят токоограничивающий элемент, который шунтируют после достижения второй электрической машиной...
Спосіб електровимірювальної оцінки іскробезпечності індуктивних електричних ланцюгів змінного та пульсуючого постійного струму
Номер патенту: 4430
Опубліковано: 27.12.1994
Автори: Шатіло Олексій Миколайович, Залогін Олександр Сергійович, Коган Олександр Григорович
МПК: E21F 9/00
Мітки: іскробезпечності, пульсуючого, електровимірювальної, постійного, індуктивних, ланцюгів, струму, змінного, оцінки, спосіб, електричних
Формула / Реферат:
Способ электроизмерительной оценки искробезопасности индуктивных электрических цепей переменного и пульсирующего постоянного токов, основанный на периодическом подключении и отключении модели разрядного промежутка к испытываемой цепи и определении максимального напряжения на разрядном промежутке, отличающийся тем, что, с целью повышения достоверности оценки искробезопасности индуктивных электрических цепей за счет определения и...
Багатополюсна електрична машина постійного струму

Номер патенту: 2139
Опубліковано: 26.12.1994
Автори: Завгородній Віктор Дмитрович, Чучман Юрій Іванович
МПК: H02K 23/26, H02K 13/14
Мітки: електрична, машина, багатополюсна, постійного, струму
Формула / Реферат:
Многополюсная электрическая машина постоянного тока, содержащая индуктор с р = d • m парами полюсов чередующейся полярности, якорь с замкнутой обмоткой, состоящей из равномерно расположенных по расточке якоря секций, число s которых не имеет общих делителей с числом пар полюсов р, и коллектор с числом коллекторных пластин k = m • s, соединенных между собой токоподводящими перемычками с шагом по коллектору, равным s, отличающаяся тем, что, с...
Попередній патент: Валковий вузол широкоштабового стана
Наступний патент: Пристрій для поліпшення комутації колекторних електричних машин постійного струму
Випадковий патент: Штам yersinia enterocolitica iecvm серовар о:9 для виготовлення антигену та сироватки для серологічної діагностики ієрсиніозу тварин