Автоматизована система керування дорожнім рухом мегаполісу
Номер патенту: 71692
Опубліковано: 25.07.2012
Автори: Левтеров Андрій Іванович, Альошин Геннадій Васильович, Ярута Антон Миколайович

Формула / Реферат
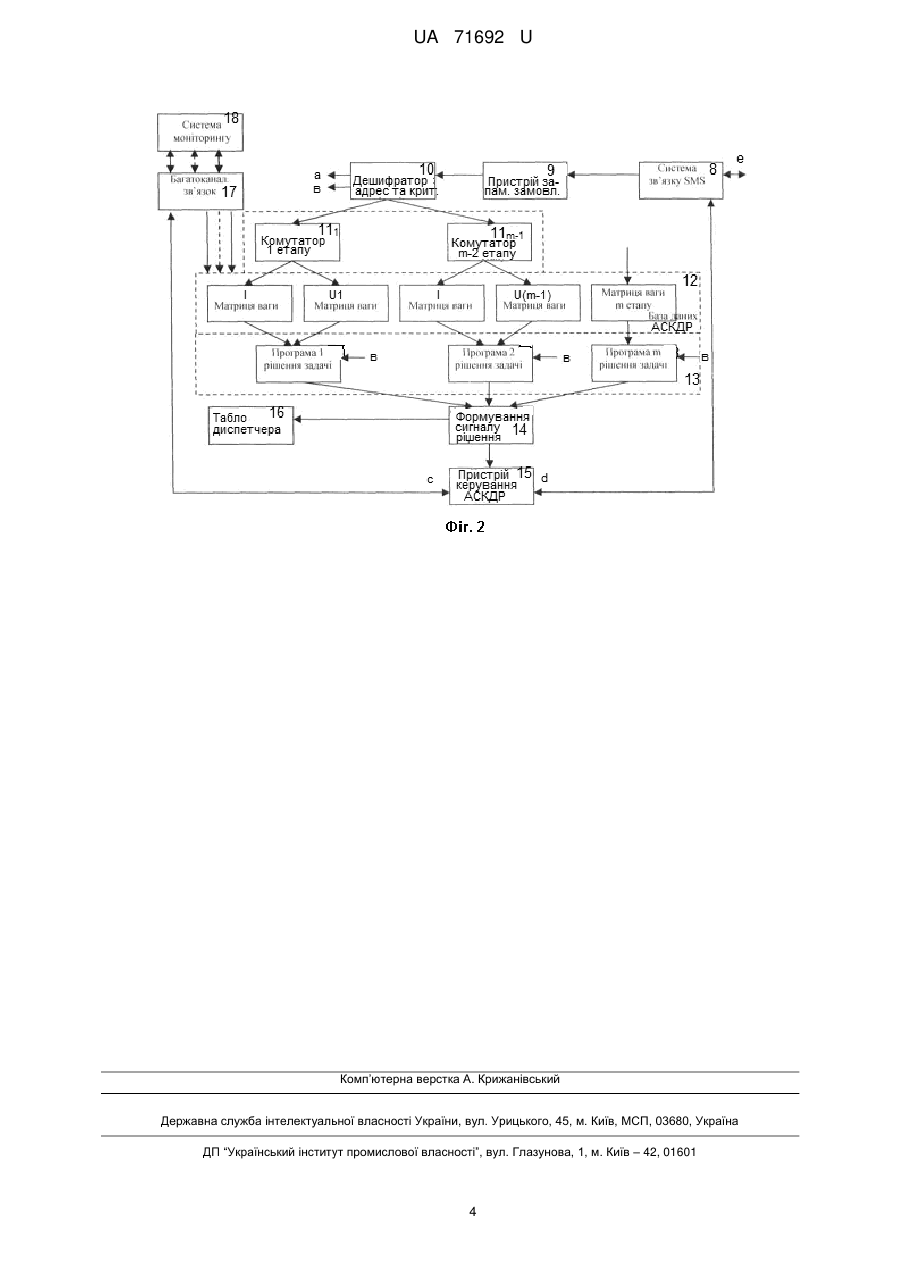
Автоматизована система керування дорожнім рухом (АСКДР) мегаполісу, що містить супутниковий радіоприймач GPS (або "Глонасс"), вирішуючий пристрій, дисплей і електронну мапу регіону, причому електронна мапа і супутниковий радіоприймач підключені до входів вирішуючого пристрою, а вихід його підключений до входу дисплея, яка відрізняється тим, що додатково введені послідовно сполучені пристрій набору адрес, шифратор і приймально-передавальна система зв'язку транспортного засобу, зв'язана з системою зв'язку АСКДР, яка послідовно сполучена з пристроєм запам'ятовування замовлення, дешифратором адрес, з паралельним набором комутаторів етапів багатоетапної маршрутизації, з базою даних набору матриць ваги всіх етапів, блоком обчислювальних програм рішення задачі для всіх етапів, пристрою формування сигналу рішення і пристрою керування АСКДР, при цьому вихід "d" пристрою керування АСКДР з'єднаний з входом системи зв'язку АСКДР, а вихід "с" послідовно через багатоканальний радіозв'язок сполучений з розподіленою системою моніторингу транспортних засобів, вихід "а" дешифратора адрес сполучений з матрицею ваги m-ого етапу бази даних АСУДР, а вихід "в" - з входами блока обчислювальних програм рішення задачі для всіх етапів, вихід приймально-передавальної системи зв'язку транспортного засобу підключений до входу дисплея, пристрій формування рішення сполучений з входом табло диспетчера і вихід багатоканального зв'язку кожного каналу підключений до відповідної вагової матриці бази даних АСКДР.
Текст
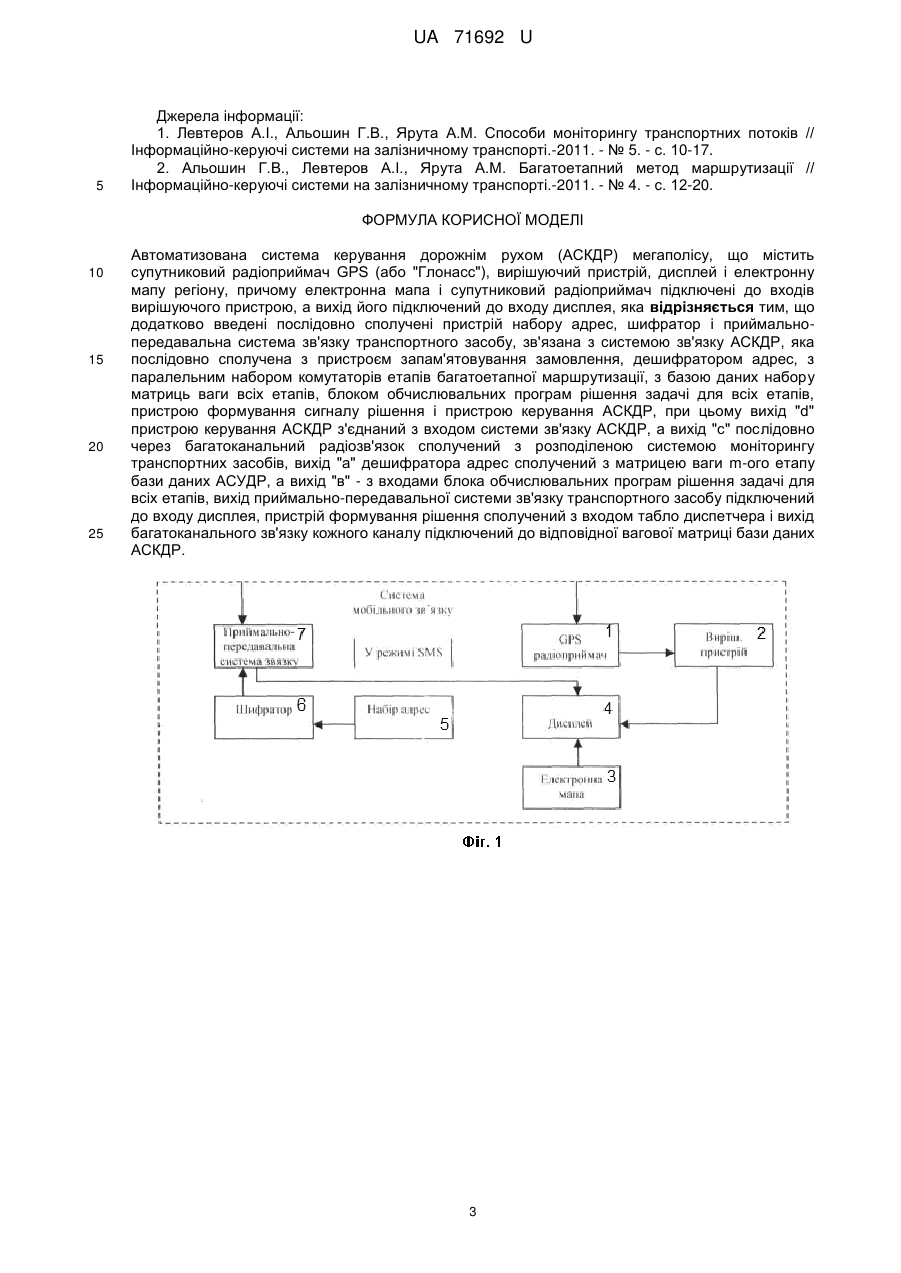
Реферат: UA 71692 U UA 71692 U 5 10 15 20 25 30 35 40 45 50 55 60 Автоматизована система керування дорожнім рухом (АСКДР) мегаполісу є комплексною системою, яка підвищує пропускну спроможність транспортно-дорожньої мережі за рахунок того, що керує режимами транспортно-дорожньої мережі і оперативно, в темпі поточного часу, забезпечує учасників руху транспортними засобами (ТЗ) інформацією про оптимальні, по заданих критеріях, маршрути. Відома неорганізована система, в якій навігатори для кожного його власника - учасника дорожнього руху - індивідуально визначають оптимальні маршрути і супроводжують водіїв ТЗ транспортно-дорожньої мережі по заданих електронних мапах місцевості з використанням навігаторів GPS або "Глонасс" (Модель навігатора StreetPilot і3, виконує, окрім визначення координат і супроводу ТЗ по транспортно-дорожній мережі, також функцію пошуку пункту призначення - стоку по спеціальному меню. Модель StreetPilot і3-Back). Навігатори, що використовують оптимальну маршрутизацію і меню стоків, містять супутниковий радіоприймач GPS (або "Глонасс"), вирішуючий пристрій, дисплей і електронну мапу регіону, причому електронна мапа і супутниковий радіоприймач підключені до входів вирішуючого пристрою, а вихід його підключений до входу дисплея. Перевагою використання неорганізованої системи, сукупності навігаторів даного типу є оптимальність або економічність проїзду відповідних ТЗ в регіоні, полегшення водіям проїзду маршрутів. До недоліків слід віднести: 1) неоперативність обліку і реагування на зміни в транспортно-дорожній мережі, на аварії і створення пробок, тобто, на зменшення пропускної спроможності доріг, що робить неоптимальними розраховані заздалегідь маршрути; 2) взаємна незалежність при маршрутизації і неузгодженість маршрутів при проїзді, яка також приводить до втрат пропускної спроможності транспортно-дорожньої мережі, особливо в умовах швидкого зростання числа ТЗ; 3) проблеми складності оптимальної маршрутизації при великій розмірності графа транспортно-дорожньої мережі мегаполісу; 4) нездатність неорганізованої системи з сукупністю навігаторів впливати на транспортнодорожню обстановку. У основу корисної моделі автоматизованої системи керування дорожнім рухом (АСКДР) мегаполісу поставлено задачу підвищити її багатофункціональність, тобто, підвищити оперативність вирішення задач оптимальної маршрутизації, оперативність виявлення і обліку змін в обстановці дорожньої мережі при маршрутизації, розв'язати пересічні маршрути і здешевити, використовувати лише один обчислювальний пристрій за рахунок централізації і універсалізації критеріїв вирішення задач, за рахунок використання системи оперативного моніторингу ТЗ і спрощених каналів зв'язку оперативно керувати режимами мережі світлофорів і пристроїв керування дорожнім рухом при різних погодних умовах, часі доби і сезону. При вирішенні задачі використовуються принцип взаємної розв'язки маршрутів ТЗ, принципи створення оперативної інформаційної системи моніторингу ТЗ і оперативний, багатоетапний спосіб визначення оптимальних по заданому критерію маршрутів ТЗ в мегаполісі великої розмірності. Багатоетапний метод вирішення багаторозмірних задач використовує принцип декомпозиції задач маршрутизації [2], який враховує: категорійність доріг на етапі розробки електронних мап ділянок доріг [2], принцип укрупнення масштабу (як у географічних мапах) із збереженням для індикації і розрахунків лише крупних об'єктів, принцип географічної прив'язки мережі реальних доріг до орієнтирів місцевості, облік їх пріоритету (категорійності), а також використання поштових індексів. При багатоетапному методі маршрутизації [1] на останньому m-ому етапі вибирається такий масштаб електронної мапи, при якому залишаються лише дорожні вершини і ребра графа для магістральних доріг найвищих категорій. Висока категорія доріг забезпечує велику безпеку руху, велику пропускну спроможність, велику надійність проїзду і забезпечує кращі значення критеріїв якості проїзду маршрутів: мінімум часу проїзду, мінімум відстані, економічність, екологічність і т. д. Категорія доріг забезпечується: розділеним зустрічним рухом, обладнанням розв'язок і переходів, багаторядністю, кращою якістю покриттів, кращим обладнанням і організацією руху, кращим доглядом за дорогою і т. д. При цьому число вершин і ребер залишається таким, щоб час розрахунку оптимального маршруту був заданим, вершини і прилеглі ребра мають бути рівномірно розподілені по мегаполісу, незважаючи навіть на категорійність доріг. Це останній етап у вирішенні задач маршрутизації. Попередні етапи виходять, якщо розбити область навколо кожної вершини останнього етапу на декілька складових. При цьому масштаб зменшується, електронна мапа стає докладнішою. У кожній складовій (підобласті) слід визначити центральні вершини з покращуваними дорогами і т. д. Число етапів має бути таким, 1 UA 71692 U 5 10 15 20 25 30 35 40 45 50 55 щоб на першому етапі число вершин і ребер графа першої підобласті забезпечував заданий час розрахунку оптимального маршруту в даній підобласті. Оскільки відомі адреси в своїх підобластях витоку і стоку першого етапу і їх вибрані центральні вершини, то одночасно вирішується задача маршрутизації в них, а також на останньому етапі. Оптимальні маршрути на проміжних етапах розраховуються заздалегідь і вибираються на підставі адрес. Наприклад, масштаби електронних мап і відповідні центральні вершини підобластей можна вибирати за принципом поштових індексів: індекс міста, індекс району і індекс поштового відділення. Задання адрес приводить до однозначного визначення центральних вершин і підключення матриць ваги задач маршрутизації. Поставлена задача вирішується тим, що в автоматизовану систему керування дорожнім рухом мегаполісу, що містить супутниковий радіоприймач GPS (або "Глонасс"), вирішуючий пристрій, дисплей і електронну мапу регіону, причому електронна мапа і супутниковий радіоприймач підключені до входів вирішуючого пристрою, а вихід його підключений до входу дисплея, додатково введені, послідовно сполучені пристрій набору адрес, шифратор і приймально-передавальна система зв'язку транспортного засобу, зв'язаний з системою зв'язку АСКДР, яка послідовно сполучена з пристроєм запам'ятовування замовлення, дешифратором адрес, з паралельним набором комутаторів етапів багатоетапної маршрутизації, з базою даних набору матриць ваги всіх етапів, блоком обчислювальних програм рішення задачі для всіх етапів, пристрою формування сигналу рішення і пристрою керування АСКДР, при цьому вихід "d" пристрою керування АСКДР з'єднаний з входом системи зв'язку АСКДР, а вихід "с" послідовно через багатоканальний радіозв'язок сполучений з розподіленою системою моніторингу транспортних засобів, вихід "а" дешифратора адрес сполучений з матрицею ваги m-ого етапу бази даних АСКДР, а вихід "в" - з входами блока обчислювальних програм рішення задачі для всіх етапів, вихід приймально-передавальної системи зв'язку транспортного засобу підключений до входу дисплея, пристрій формування рішення сполучений з входом табло диспетчера і вихід багатоканального зв'язку кожного каналу підключений до відповідної вагової матриці бази даних АСКДР. На фіг. 1 наведена структурна схема навігатора одного з сукупності транспортних засобів, де: 1 - радіоприймач GPS (або "Глонасс"), 2 - вирішуючий пристрій, 3 - електронна мапа, 4 дисплей, 5 - пристрій набору адрес, 6 - шифратор, 7 - приймально-передавальна система зв'язку транспортного засобу. На фіг. 2 наведена структурна схема АСКДР мегаполісу, де: 8 - система зв'язку SMS, 9 пристрій запам'ятовування замовлення, 10 - дешифратор адрес, 111-11m-1 - паралельний набір комутаторів етапів багатоетапної маршрутизації, 12 - база даних АСКДР, 13 - блок обчислювальних програм рішення задачі для всіх етапів, 14 - пристрій формування сигналу рішення, 15 - пристрій керування АСКДР, 16 - табло диспетчера, 17 - багатоканальний зв'язок, 18 - розподілена система моніторингу транспортних засобів. Принцип дії АСКДР мегаполісу полягає в наступному. Водій з використанням в індивідуальному навігаторі пристрою набору адрес 5, шифратора 6 і приймально-передавальну систему зв'язку 7 або, за домовленістю з оператором зв'язку, за допомогою каналу пейджингового зв'язку SMS, з виходу "е" посилає в приймально-передавальну систему зв'язку АСКДР 8 на вхід "е" адреси, або поштові індекси витоку і стоку необхідних маршрутів, а також потрібний йому критерій оптимальності, наприклад, мінімум часу проїзду. Пристрій запам'ятовування замовлень 9 служить для постановки водіїв в чергу при великому завантаженні системи. Дешифратор 10 з виходу "а" подає команду на комутатор 11 j на включення, відповідно, до адрес матриць ваги завдання маршрутизації для конкретної місцевості мегаполісу і для необхідного етапу (масштабу) в базі даних 12. З дешифратора 10 з виходу "в" надходить команда на вхід "в" обчислювального пристрою 13і на підключення програми з необхідним критерієм маршрутизації: мінімумом часу проїзду або завданню про максимальний потік і т. д.Пристрій формування сигналу рішення 14 подає інформацію на табло диспетчера для контролю і на пристрій керування АСКДР 15, звідки з виходу "d" подається на приймально-передавальну систему зв'язку АСКДР 8 для передачі сигналу (SMS) на вхід "е" приймально-передавальної системи зв'язку 7 навігатора. З виходу приймально-передавальної системи зв'язку 7 навігатора сигнал оптимального маршруту подається на дисплей 4. Радіоприймач GPS 1 приймає сигнал про реальні координати маршруту, вирішуючий пристрій 2 порівнює реальні координати з координатами вершин оптимального маршруту електронної мапи 3 і, використовуючи збіги значень координат, супроводжує транспортний засіб по оптимальному маршруту. 2 UA 71692 U 5 Джерела інформації: 1. Левтеров A.I., Альошин Г.В., Ярута A.M. Способи моніторингу транспортних потоків // Інформаційно-керуючі системи на залізничному транспорті.-2011. - № 5. - с. 10-17. 2. Альошин Г.В., Левтеров А.І., Ярута A.M. Багатоетапний метод маршрутизації // Інформаційно-керуючі системи на залізничному транспорті.-2011. - № 4. - с. 12-20. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 25 Автоматизована система керування дорожнім рухом (АСКДР) мегаполісу, що містить супутниковий радіоприймач GPS (або "Глонасс"), вирішуючий пристрій, дисплей і електронну мапу регіону, причому електронна мапа і супутниковий радіоприймач підключені до входів вирішуючого пристрою, а вихід його підключений до входу дисплея, яка відрізняється тим, що додатково введені послідовно сполучені пристрій набору адрес, шифратор і приймальнопередавальна система зв'язку транспортного засобу, зв'язана з системою зв'язку АСКДР, яка послідовно сполучена з пристроєм запам'ятовування замовлення, дешифратором адрес, з паралельним набором комутаторів етапів багатоетапної маршрутизації, з базою даних набору матриць ваги всіх етапів, блоком обчислювальних програм рішення задачі для всіх етапів, пристрою формування сигналу рішення і пристрою керування АСКДР, при цьому вихід "d" пристрою керування АСКДР з'єднаний з входом системи зв'язку АСКДР, а вихід "с" послідовно через багатоканальний радіозв'язок сполучений з розподіленою системою моніторингу транспортних засобів, вихід "а" дешифратора адрес сполучений з матрицею ваги m-ого етапу бази даних АСУДР, а вихід "в" - з входами блока обчислювальних програм рішення задачі для всіх етапів, вихід приймально-передавальної системи зв'язку транспортного засобу підключений до входу дисплея, пристрій формування рішення сполучений з входом табло диспетчера і вихід багатоканального зв'язку кожного каналу підключений до відповідної вагової матриці бази даних АСКДР. 3 UA 71692 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomatic control system of magapolis traffic
Автори англійськоюAlioshyn Hennadii Vasyliovych, Levterov Andrii Ivanovych, Yaruta Anton Mykolaiovych
Назва патенту російськоюАвтоматизированная система управления дорожным движением мегаполиса
Автори російськоюАлешин Геннадий Васильевич, Левтеров Андрей Иванович, Ярута Антон Николаевич
МПК / Мітки
МПК: G08G 1/09
Мітки: мегаполісу, керування, дорожнім, рухом, система, автоматизована
Код посилання
<a href="https://ua.patents.su/6-71692-avtomatizovana-sistema-keruvannya-dorozhnim-rukhom-megapolisu.html" target="_blank" rel="follow" title="База патентів України">Автоматизована система керування дорожнім рухом мегаполісу</a>
Міжрегіональна система керування дорожнім рухом
Номер патенту: 18455
Опубліковано: 15.11.2006
Автор: Щуренко Юрій Олександрович
Мітки: керування, міжрегіональна, рухом, система, дорожнім
Формула / Реферат:
1. Міжрегіональна система керування дорожнім рухом, яка через мережу Internet має зв'язок з іншими інформаційними системами і абонентами системи та містить міські системи керування дорожнім рухом, які, у свою чергу, мають у своєму складі міський (МЦ) та мобільний (МЦК) центри керування, периферійні об'єкти (ПФО) та міжмережні екрани (МЕ), яка відрізняється тим, що додатково включає міжрегіональний адміністративно-технологічний центр (МАТЦ),...
Комплексна система керування дорожнім рухом
Номер патенту: 9841
Опубліковано: 17.10.2005
Автор: Щуренко Юрій Олександрович
МПК: G08G 1/01
Мітки: рухом, система, керування, комплексна, дорожнім
Формула / Реферат:
1. Комплексна система керування дорожнім рухом, яка має центральний комп'ютер, до якого через канали зв'язку приєднані периферійні об'єкти, такі як світлофорні об'єкти, керовані дорожні знаки, детектори транспорту, детектори забруднення навколишнього середовища, відеокамери, інформаційні табло, приймальні пристрої абонентів, яка відрізняється тим, що система додатково включає міський та мобільний центр керування, транзитний сервер обміну,...
Спосіб здійснення інформаційної взаємодії в автоматизованих системах керування дорожнім рухом з використанням internet-сервера баз даних
Номер патенту: 28095
Опубліковано: 26.11.2007
Автор: Щуренко Юрій Олександрович
МПК: G08G 1/01
Мітки: даних, керування, автоматизованих, internet-сервера, баз, рухом, спосіб, взаємодії, здійснення, системах, використанням, дорожнім, інформаційної
Формула / Реферат:
Спосіб здійснення інформаційної взаємодії центрів керування, периферійних пристроїв, абонентів автоматизованих систем керування дорожнім рухом і зовнішніх до зазначеної системи інформаційних систем з використанням технології "Клієнт-Сервер", який відрізняється тим, що зазначені центри керування, периферійні пристрої, абоненти автоматизованої системи керування дорожнім рухом і зовнішні інформаційні мережі є клієнтами INTERNET-сервера...
Спосіб здійснення інформаційної взаємодії в інформаційних системах моніторингу та керування дорожнім рухом
Номер патенту: 42748
Опубліковано: 27.07.2009
Автор: Щуренко Юрій Олександрович
МПК: G08G 1/01
Мітки: рухом, спосіб, інформаційних, системах, моніторингу, керування, взаємодії, інформаційної, дорожнім, здійснення
Формула / Реферат:
1. Спосіб здійснення інформаційної взаємодії в інформаційних системах моніторингу та керування дорожнім рухом, що включає передачу керуючих команд з боку центру керування на периферійні пристрої і отримання центром керування від периферійних пристроїв інформації про їх технічний стан при використанні технології "клієнт-сервер", який відрізняється тим, що вищенаведені керуючі команди та інформація про технічний стан передаються в...
Автоматизована система контролю та управління споживанням тепла житловими масивами мегаполісу
Номер патенту: 40477
Опубліковано: 15.04.2003
Автори: Золотухін Леонід Онисимович, Корсуненко Василь Іванович, Сергеєв Сергій Олександрович, Вороновський Геннадій Кирилович, Ольшевський Олексій Михайлович, Махотіло Костянтин Володимирович
МПК: F24D 19/00
Мітки: мегаполісу, споживанням, тепла, масивами, житловими, контролю, управління, автоматизована, система
Формула / Реферат:
Автоматизована система контролю та управління споживанням тепла житловими масивами мегаполісу, що включає центральний процесор та периферійну інформаційно-обчислювальну мережу з підключеними до неї реєстраторами стану засувної та регулюючої арматури магістральної теплової мережі, а також вузлами обліку теплової енергії, що встановлені на вихідних колекторах крупних джерел системи централізованого теплопостачання та центральних теплопунктах,...
Попередній патент: Спосіб роботи випарного охолоджувача непрямого типу
Наступний патент: Рисова зрошувальна система “777” сокірко і.а.
Випадковий патент: Установка для дослідження триботехнічних властивостей матеріалів і покриттів