Пристрій розпізнавання й класифікації образів
Номер патенту: 68375
Опубліковано: 26.03.2012
Автори: Котов Ігор Ігорович, Дмитрієнко Валерій Дмитрійович, Заковоротний Олександр Юрійович


Формула / Реферат
Пристрій розпізнавання й класифікації образів, що складається з сенсорного шару нейронів (блоку порогових елементів), який відрізняється тим, що в нього введений шар інтерфейсних елементів, нейрони якого пов'язані з відповідними їм елементами сенсорного шару вхідними бінарними односпрямованими зв'язками, шар розпізнавальних елементів, нейрони якого пов'язані з кожним з елементів у інтерфейсному шарі парами двонаправлених зважених зв'язків з безперервними ваговими коефіцієнтами, вирішальний нейрон, який пов'язаний збудливими вхідними зв'язками з усіма елементами сенсорного і інтерфейсного шарів й гальмівними зв'язками з усіма елементами розпізнавального і загального розпізнавального шарів нейронів, два керуючих нейрони, перший з яких пов'язаний вхідними збудливими зв'язками з усіма елементами сенсорного шару нейронів, вихідними збудливими зв'язками з усіма елементами інтерфейсного шару й гальмівними вхідними зв'язками з усіма елементами розпізнавального і загального розпізнавального шарів нейронів, другий з яких пов'язаний вхідними збудливими зв'язками з усіма елементами сенсорного шару й збудливими вихідними зв'язками з усіма елементами розпізнавального й загального розпізнавального шарів нейронів, а також загальний розпізнавальний шар нейронів, елементи якого пов'язані двонаправленими зваженими зв'язками з відповідними елементами інтерфейсного шару нейронів.
Текст
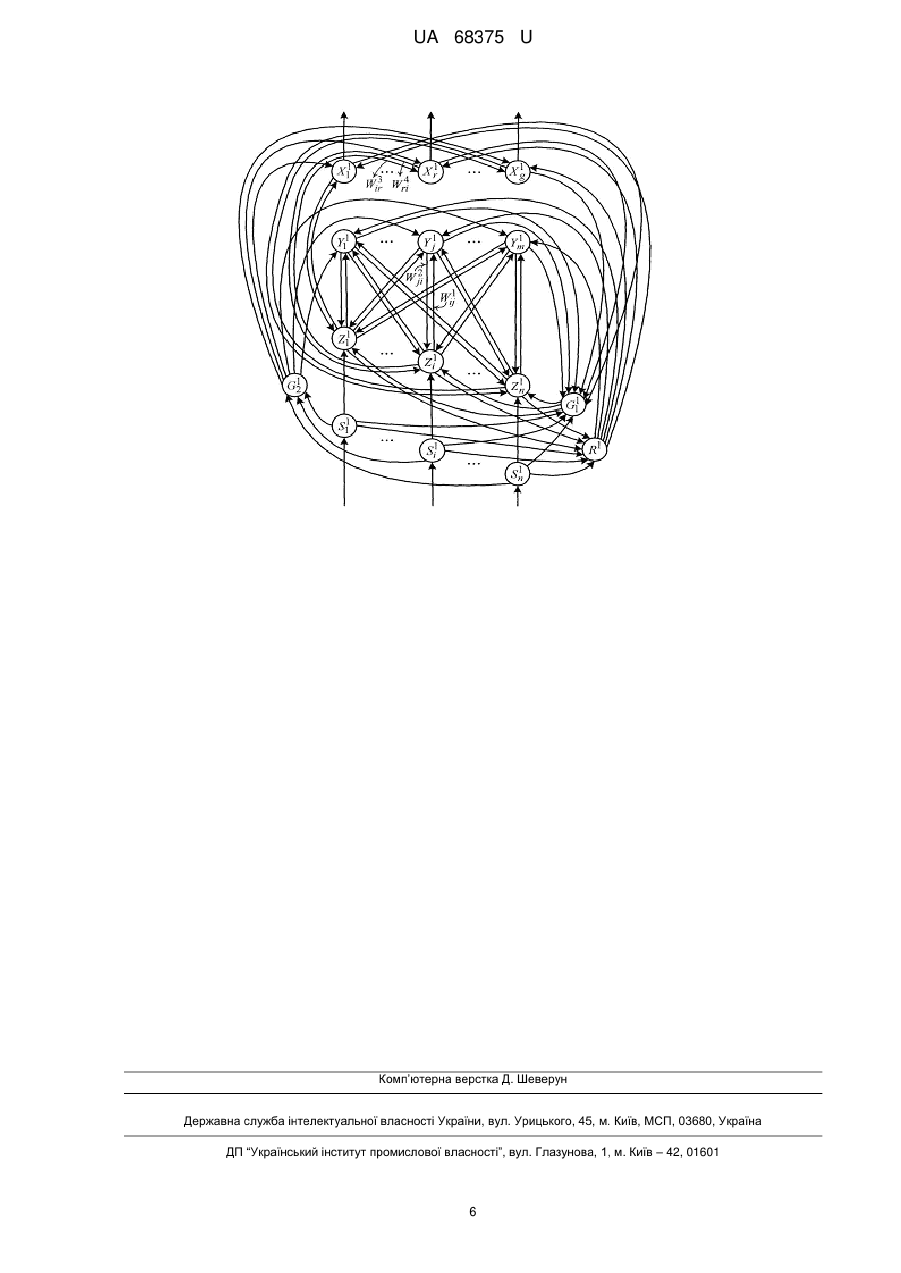
Реферат: UA 68375 U UA 68375 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до обчислювальної техніки, зокрема до області побудови автоматизованих систем керування, а саме до напрямку побудови систем діагностики й керування складними технічними об'єктами. Винахід може бути використаний при побудові системи керування або діагностики такого складного технічного об'єкта як трифазний асинхронний тяговий електропривод. Відомий пристрій для розпізнавання образів, який містить блок зважування, блок впорядкування навчальних сигналів і блок формування цілочисельних ваг, входи якого з'єднані з відповідними виходами блока впорядкування навчальних сигналів, а виходи з'єднані з керуючими входами блока зважування, який відрізняється тим, що в нього введено вхідний блок і блок класифікації, причому входи вхідного блока є інформаційними входами пристрою, а його виходи з'єднані з входами блока впорядкування навчальних сигналів та блока зважування, виходи якого з'єднані з входами блока класифікації, вхід скиду і вхід адреси якого з'єднані з відповідними входами пристрою, виходи результатів блока класифікації з'єднані з другими входами блока формування цілочисельних ваг, його виходи класифікації є відповідними виходами пристрою, а вихід ознаки є виходом сигналу "Кінець" пристрою [1]. Недоліком відомого пристрою розпізнавання образів є обмеження яке накладається на порядок пред'явлення навчальних сигналів. Відомий пристрій для розпізнавання образів, який містить блок зважування, блок впорядкування навчальних сигналів і блок формування цілочисельних ваг, входи якого з'єднані з відповідними виходами блока впорядкування навчальних сигналів, а виходи з'єднані з керуючими входами блока зважування, який відрізняється тим, що в нього введено вхідний блок і блок класифікації, причому входи вхідного блока є інформаційними входами пристрою, а його виходи з'єднані з входами блока впорядкування навчальних сигналів та блока зважування, виходи якого з'єднані з входами блока класифікації, вхід скиду, перший і другий адресні входи, вхід дозволу та вхід задания порогу якого з'єднані з відповідними входами пристрою, перша група виходів блока класифікації з'єднана з другими входами блока формування цілочисельних ваг, друга група виходів блока класифікації є інформаційними виходами пристрою, перший вихід є його виходом підсумкового сигналу, а другий вихід - виходом сигналу "Кінець" пристрою [2]. При порівнянні з першим аналогом пристрій розпізнавання образів не накладає обмеження на порядок пред'явлення вхідних навчальних сигналів. Однак розглянутий пристрій розпізнавання й класифікації образів накладає обмеження на форму вхідних навчальних сигналів. Найбільш близьким до заявленого пристрою є пристрій розпізнавання, що містить блок формування фрагментів зображення, блок порогових елементів, вхід якого з'єднаний з виходом блоку формування фрагментів зображення, а також перший і другий паралельні суматори, який відрізняється тим, що введені блок розподілу, перший і другий виходи якого з'єднані з виходами відповідно першого і другого паралельних суматорів, блок порівняння, перший вхід якого з'єднаний з виходом блоку поділу, блок зберігання еталонних відносин, вихід якого з'єднаний з другим входом блоку порівняння, і блок визначення мінімуму, вхід якого з'єднаний з виходом блоку порівняння, при цьому входи першого і другого паралельних суматорів з'єднані відповідно з прямими і інверсними виходами блоку порогових елементів [3]. При порівнянні з відомими аналогами пристрій-прототип не накладає обмежень на порядок пред'явлення і форму навчальних зображень (сигналів). Однак у розглянутого прототипу відсутня можливість донавчання в процесі його функціонування. Це пов'язано з тим, що запам'ятовування нових зображень вимагає процесу повної перебудови структури пристрою. Таким чином, недоліком прототипу є те, що він не в змозі донавчатися в процесі свого функціонування. Задача корисної моделі - розробка пристрою розпізнавання й класифікації образів, що має можливість донавчання в процесі свого функціонування. Задача вирішується завдяки тому, що пристрій розпізнавання й класифікації образів перебудовується шляхом введення в його структуру сенсорного шару нейронів, шару інтерфейсних елементів, нейрони якого пов'язані з відповідними їм елементами сенсорного шару вхідними бінарними односпрямованими зв'язками, шару розпізнавальних елементів, нейрони якого пов'язані з кожним з елементів у інтерфейсному шарі парами двонаправлених зважених зв'язків з безперервними ваговими коефіцієнтами, вирішального нейрону, який пов'язаний збудливими вхідними зв'язками з усіма елементами сенсорного і інтерфейсного шарів й гальмівними зв'язками з усіма елементами розпізнавального і загального розпізнавального шарів нейронів, двох керуючих нейронів, перший з яких пов'язаний вхідними збудливими зв'язками з усіма елементами сенсорного шару нейронів, вихідними збудливими 1 UA 68375 U 5 10 15 20 25 зв'язками з усіма елементами інтерфейсного шару й гальмівними вхідними зв'язками з усіма елементами розпізнавального і загального розпізнавального шарів нейронів, другий з яких пов'язаний вхідними збудливими зв'язками з усіма елементами сенсорного шару й збудливими вихідними зв'язками з усіма елементами розпізнавального й загального розпізнавального шарів нейронів, а також загального розпізнавального шару нейронів, елементи якого пов'язані двонаправленими зваженими зв'язками з відповідними елементами інтерфейсного шару нейронів. Це стає можливим завдяки тому, що розроблений пристрій побудований на основі нейронних мереж адаптивної резонансної теорії, які відносять вхідне зображення до одного з відомих класів зображень, якщо воно в достатній мірі подібно або резонує з прототипом цього класу. Якщо знайдений прототип з певною точністю, що задається спеціальним параметром подібності, відповідає вхідному зображенню, то в режимі навчання він модифікується, щоб стати більш схожим на пред'явлене зображення, а в режимі розпізнавання залишається в активному стані відповідний розпізнавальний нейрон. Коли вхідне зображення недостатньо подібно жодному з наявних прототипів, то на його основі і в режимі навчання, і в режимі розпізнавання створюється прототип нового класу. Це можливо завдяки наявності в мережі великої кількості надлишкових нейронів, які не використовуються, до тих пір, поки в цьому немає потреби. Отже, нові образи можуть запам'ятовуватися мережею без спотворення вже запам'ятованої раніше інформації. Крім того, нейронні мережі адаптивної резонансної теорії відрізняються здатністю відокремлювати нові образи від спотворених або зашумлених відомих образів. Винахід ілюструється рисунком на якому наведена схема пристрою розпізнавання й класифікації образів розробленого на основі безперервних нейронних мереж адаптивної резонансної теорії. Архітектура нейронної мережі АРТ-1У містить у собі вхідний шар елементів S1 S1, , S1, , S1 1 i n , який приймає зображення і передає отриману інформацію нейронам 1 1 G1, G1 інтерфейсного шару Z та керуючим нейронам 1 2 та R . Елементи інтерфейсного шару Z1 i 1 , n , i вагами 30 пов'язані з елементами розпізнавального шару 1 2 Wij , Wji i 1, , n; j 1, , m , зваженими зв'язками з вагами і Yj1 j 1 , m , , зваженими зв'язками з а також з елементами розпізнавального шару 3 4 Wir , Wri i 1 , n; r 1 , g , , X1 r 1 , g , r . Шари розпізнавальних елементів 1 1 , , X , Y є шарами нейронів, які змагаються, в якому кожен елемент Yj j 1 , m, Xr r 1 , g може 1 1 знаходитися в одному з трьох станів: активному, неактивному, загальмованому. Елементи G1 1 та G1 2 використовуються для забезпечення керування нейронами інтерфейсного і розпізнавальних шарів. 35 1 За допомогою нейрона R визначається параметр подібності вхідного зображення і зображення, що зберігається у вагах зв'язків нейрона, що переміг, а також здійснюється 1 40 45 50 1 загальмування нейронів розпізнавальних шарів Y або X . Y-нейрони використовуються в режимі навчання та в режимі розпізнавання, для запам'ятовування нової інформації. Перша стадія навчання мережі АРТ-1У може виконуватися так само, як і в звичайних мережах АРТ-1. Вчитель на цій стадії тільки фіксує номери нейронів, які розпізнають сигнали, що відносяться до кожного із заданого числа N запам'ятованих образів. На другій стадії навчання вчитель на основі множин ваг зв'язків між Y- і Z-слоями нейронів, що відносяться до кожного із заданих образів, формує матриці ваг зв'язків між X- і Z-шарами елементів. Однак такий підхід може вимагати надмірного збільшення кількості елементів в Yшарі, оскільки необхідно зберігати інформацію про всі вхідні зображення всіх класів. Тому були розроблені алгоритми послідовного навчання мережі заданому числу образів і послідовному формуванню ваг зв'язків між X- і Z-шарами нейронів. Х-нейрони функціонують лише в режимі розпізнавання, при цьому вони виконують тільки розпізнавання, а нову інформацію засвоює шар Y-нейронів. Нова інформація передається в Хшар за допомогою вчителя в спеціальних режимах донавчання Х-шару нейронів. Пристрій розпізнавання й класифікації образів, на основі нейронних мереж АРТ-1, функціонує відповідно до двох алгоритмах: навчання і розпізнавання. В алгоритмах прийняті наступні позначення: n - число бінарних компонентів у вхідному векторі; 2 UA 68375 U L - константа, що перевищує одиницю, рекомендоване значення: L 2 ; p - параметр подібності між вхідним вектором і вектором, що зберігається у вагах зв'язків нейрона, що переміг; діапазон допустимих значень параметрів: 0 p 1 ; 1 Wij i 1 , n; j 1 , m , , 5 - ваги зв'язків від елементів інтерфейсного шару до елементів розпізнавального шару; діапазон допустимих рекомендоване початкове значення при навчанні: 1 Wij початкових значень: 1 0 Wij 1 L 1 n ; 1 1 n ; 2 W ji - ваги зв'язків від елементів розпізнавального шару до елементів інтерфейсного шару; рекомендоване початкове значення при навчанні: 10 2 W ji 1 i 1 , n; j 1 , m , , Uвих .Y1 j 1, , m j Uвих .S1 i 1 , n , i Uвих .Z1 i 1 , n , 15 S1 r i - вихідний сигнал розпізнавального елемента S1 i - вихідний сигнал елемента i Uвх.Z1 i 1, , n ; - вхідний сигнал елемента Z1 i - вихідний сигнал елемента S11, , S1 , r 1 , q , r rn Y j1 ; S-шapy; інтерфейсного шару; Z1 i інтерфейсного шару; - бінарні вхідні вектора; X - норма вектора X. Алгоритм навчання пристрою розпізнавання й класифікації образів на основі дискретних нейронних мереж APT, передбачає виконання наступних кроків: W1, W 2 i 1 , n; j 1 , m , , 20 Крок 1. Ініціюються параметри L, p1 і ваги зв'язків ij ji . Крок 2. Задаються нульові вихідні сигнали всіх розпізнавальних елементів нейронної мережі: Uвих .Y 1 0; j 1 , m. , j Крок 3. Для кожного вхідного зображення S1 r Крок 4. Вхідним вектором 25 Uвих .S1 ri S1 , i ri S1 S11, , S1 , r 1 , q , r r rn виконуються кроки 4-13. визначаються вихідні сигнали елементів S1 i вхідного шару: 1 , n. , Крок 5. Обчислюються норми векторів вихідних сигналів нейронів вхідного шару: n Uвих .S1 U i1 вих .S1 i . Крок 6. Формуються вхідні і вихідні сигнали елементів інтерфейсного шару нейронної мережі: 30 Uвх.Z1 Uвих .S1 ; Uвих .Z1 Uвх.Z1 ; i 1 n. , i i i i Крок 7. Для кожного незагальмованого розпізнавального Y-нейрона нейронної мережі, розраховуються його вихідний сигнал: n Uвих .Y 1 j W U i 1 1 ij вих .Z1 i Uвих .Y 1 1 j 1 , m. , , j , якщо Крок 8. Поки не знайдений нейрон-переможець, ваговий вектор якого відповідно до заданого 35 S1 значення параметру подібності p1 відповідає вхідному вектору r , виконуються кроки 9-12. Крок 9. В Y-шарі визначається нейрон 1 YJ1 , котрий задовольняє умові: Uвих .Y 1 Uвих .Y 1 , j 1,, m. J1 j Якщо таких елементів декілька, то обирається елемент з найменшим індексом. Якщо Uвих .Y 1 1 J1 , то всі елементи загальмовані і вхідне зображення не може бути запам'ятоване. 3 UA 68375 U Крок 10. Розраховуються вихідні сигнали елементів інтерфейсного шару нейронної мережі: Z1i 1,, n i 2 Uвих.Z1 Uвих.S1 WJ1,i ; i 1 n. , i 5 i Крок 11. У нейронної мережі обчислюється норма вектора вихідних сигналів нейронів інтерфейсного шару: n Uвих .Z1 U i1 вих .Z1 i . Крок 12. Перевіряється за параметрами подібності p 1 правильність вибору нейрона переможця 1 YJ1 p нейронної мережі. Якщо U 10 Uвих .Z1 у неактивний стан: 1 Uвих .Y1 1 J1 , а всі інші нейрони розпізнавального шару переводяться Uвих .Y1 0, j 1,, m, j J1. j LUвих .Z1 1 WiJ 1 ; VlJ i L 1 Uвих .Z1 i LUвих .Z2 l L 1 Uвих .Z2 1 YJ1 : ; i 1 , n; l 1 , k. , , l Крок 14. Останов. Розроблений пристрій в процесі розпізнавання й класифікації образів може функціонувати в двох режимах: розпізнавання образів з вчителем та алгоритм розпізнавання без вчителя. Алгоритм розпізнавання образів без вчителя: W1, W 2 i 1 , n; j 1 , m , , Крок 1. Ініціюються параметри L, p1 і ваги зв'язків ij ji . Крок 2. Задаються нульові вихідні сигнали всіх розпізнавальних елементів нейронної мережі: Uвих .Y1 0, j 1,, m. j Крок 3. Для кожного вхідного зображення 25 1 YJ1 1 Крок 13. Адаптуються ваги зв'язків елементу 20 , то умова не виконується, елемент загальмовується: вих .YJ1 ; здійснюється перехід до кроку 8 алгоритму. Якщо p p1 , то умова, що підтверджує правильність вибору нейрона-переможця виконується і здійснюється перехід до наступного кроку алгоритму. При цьому нейрону-переможцю присвоюється одиничне значення вихідного сигналу 15 p1 Uвих .S1 S1 r Крок 4. Вхідним вектором S1 S11, , S1 , r 1 , q , r r rn виконуються кроки 4-13. визначаються вихідні сигнали елементів S1 i вхідного шару: Uвих .S1 S1 , i 1 , n. , ri ri Крок 5. Обчислюються норми векторів вихідних сигналів нейронів вхідного шару: n Uвих .S1 30 U i1 вих .S1 i . Крок 6. Формуються вхідні і вихідні сигнали елементів інтерфейсного шару нейронної мережі: Uвх.Z1 Uвих .S1 ; Uвих .Z1 Uвх.Z1 ; i 1 n. , i i i i Крок 7. Для кожного незагальмованого розпізнавального Y-нейрона нейронної мережі, розраховуються його вихідні сигнали: n Uвих .Y 1 j 35 W U i 1 1 ij вих .Z1 i Uвих .Y 1 1 j 1 , m. , , j , якщо Крок 8. Поки не знайдений нейрон-переможець, ваговий вектор якого відповідно до заданого S1 значення параметру подібності p1 відповідає вхідному вектору r , виконуються кроки 9-12. Крок 9. В Y-шарі визначається нейрон 1 YJ1 , котрий задовольняє умові: Uвих .Y 1 Uвих .Y 1 , j 1,, m. J1 j 4 UA 68375 U Якщо таких елементів декілька, то обирається елемент з найменшим індексом. Якщо Uвих .Y 1 1 J1 , то всі елементи загальмовані і вхідне зображення не може бути запам'ятоване. Крок 10. Розраховуються вихідні сигнали елементів інтерфейсного шару нейронної мережі: 5 Z1i 1,, n i 2 Uвих.Z1 Uвих.S1 WJ1,i ; i 1 n. , i i Крок 11. У нейронної мережі обчислюється норма вектора вихідних сигналів нейронів інтерфейсного шару: n Uвих .Z1 U i1 вих .Z1 i . Крок 12. Перевіряється за параметрами подібності p 1 правильність вибору нейрона 10 переможця 1 YJ1 p нейронної мережі. Якщо U Uвих .Z1 Uвих .S1 p1 , то умова не виконується, елемент 1 YJ1 1 загальмовується: вих .YJ1 ; здійснюється перехід до кроку 8 алгоритму. Якщо p p1 , то умова, що підтверджує правильність вибору нейрона-переможця виконується і здійснюється перехід до наступного кроку алгоритму. При цьому нейрону-переможцю присвоюється одиничне 1 значення вихідного сигналу 15 20 25 Uвих .Y1 1 J1 , а всі інші нейрони розпізнавального шару переводяться Uвих .Y1 0, j 1,, m, j J1. j у неактивний стан: Крок 13. Останов. Алгоритм розпізнавання й класифікації образів з вчителем передбачає виконання кроків, аналогічно до алгоритму розпізнавання образів без вчителя, але відрізняється тим, що в ньому функціонують ще і Х-нейрони, які виконують тільки розпізнавання, нова інформація передається в Х-шар за допомогою вчителя в спеціальних режимах донавчання Х-шару нейронів. Таким чином, розроблений пристрій розпізнавання й класифікації образів має можливість донавчання в процесі свого функціонування. Джерела інформації: 1. Патент України на корисну модель № 38497, кл. G06K 9/00, 2006. 2. Патент України на винахід № 92682, кл. G06K 9/00, 2009. 3. Патент Російської Федерації на корисну модель № 103050, кл. H04N 1/032, 2006. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 45 Пристрій розпізнавання й класифікації образів, що складається з сенсорного шару нейронів (блоку порогових елементів), який відрізняється тим, що в нього введений шар інтерфейсних елементів, нейрони якого пов'язані з відповідними їм елементами сенсорного шару вхідними бінарними односпрямованими зв'язками, шар розпізнавальних елементів, нейрони якого пов'язані з кожним з елементів у інтерфейсному шарі парами двонаправлених зважених зв'язків з безперервними ваговими коефіцієнтами, вирішальний нейрон, який пов'язаний збудливими вхідними зв'язками з усіма елементами сенсорного і інтерфейсного шарів й гальмівними зв'язками з усіма елементами розпізнавального і загального розпізнавального шарів нейронів, два керуючих нейрони, перший з яких пов'язаний вхідними збудливими зв'язками з усіма елементами сенсорного шару нейронів, вихідними збудливими зв'язками з усіма елементами інтерфейсного шару й гальмівними вхідними зв'язками з усіма елементами розпізнавального і загального розпізнавального шарів нейронів, другий з яких пов'язаний вхідними збудливими зв'язками з усіма елементами сенсорного шару й збудливими вихідними зв'язками з усіма елементами розпізнавального й загального розпізнавального шарів нейронів, а також загальний розпізнавальний шар нейронів, елементи якого пов'язані двонаправленими зваженими зв'язками з відповідними елементами інтерфейсного шару нейронів. 5 UA 68375 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюPattern recognition and classification device
Автори англійськоюDmytriienko Valerii Dmytrovych, Zakovorotnyy Oleksandr Yuriiovych, Kotov Ihor Ihorovych
Назва патенту російськоюУстройство распознавания и классификации образов
Автори російськоюДмитриенко Валерий Дмитриевич, Заковоротный Александр Юрьевич, Котов Игорь Игоревич
МПК / Мітки
МПК: G06K 9/00
Мітки: образів, розпізнавання, пристрій, класифікації
Код посилання
<a href="https://ua.patents.su/8-68375-pristrijj-rozpiznavannya-jj-klasifikaci-obraziv.html" target="_blank" rel="follow" title="База патентів України">Пристрій розпізнавання й класифікації образів</a>
Спосіб синтезу та навчання багатошарової нейронної мережі класифікації образів
Номер патенту: 61619
Опубліковано: 17.11.2003
Автори: Жеманюк Павло Дмитрович, Субботін Сергій Олександрович, Дубровін Валерій Іванович
Мітки: навчання, мережі, синтезу, багатошарової, спосіб, нейронної, класифікації, образів
Формула / Реферат:
Спосіб синтезу та навчання багатошарової нейронної мережі класифікації образів, який полягає у тому, що навчання нейромережі здійснюють на основі заданої навчальної вибірки даних, яку використовують для визначення ваг мережі, який відрізняється тим, що спочатку формують кластери у просторі ознак навчальної вибірки, при цьому визначають координати центрів кластерів, після чого структуру та топологію нейромережі задають у відповідності до...
Пристрій для розпізнавання образів

Номер патенту: 38497
Опубліковано: 12.01.2009
Автори: Гуцол Олександр Михайлович, Левандовський Дмитро Юрійович, Мартинюк Тетяна Борисівна
МПК: G06K 9/00
Мітки: образів, розпізнавання, пристрій
Формула / Реферат:
Пристрій для розпізнавання образів, який містить блок зважування, блок впорядкування навчальних сигналів і блок формування цілочисельних ваг, входи якого з'єднані з відповідними виходами блока впорядкування навчальних сигналів, а виходи з'єднані з керуючими входами блока зважування, який відрізняється тим, що в нього введено вхідний блок і блок класифікації, причому входи вхідного блока є інформаційними входами пристрою, а його виходи...
Пристрій для класифікації образів
Номер патенту: 27664
Опубліковано: 12.11.2007
Автори: Кравченко Олександр Михайлович, Мартинюк Тетяна Борисівна, Топчанюк Максим Володимирович, Бітюкова Жанна Олексіївна
МПК: G06K 9/00
Мітки: образів, класифікації, пристрій
Формула / Реферат:
Пристрій для класифікації образів, що містить блок зважування та обчислювальний блок, який відрізняється тим, що до нього введено вузол порогового оброблення і вузол аналізу, який містить першу, другу та третю групи m елементів І та групу m RS-тригерів, де m - кількість класів класифікації образів, і елемент І-НІ, причому перша група входів блока зважування з'єднана з n входами n-вимірного образу у вигляді вхідного векторного масиву даних,...
Пристрій для класифікації образів

Номер патенту: 34128
Опубліковано: 25.07.2008
Автори: Гуцол Олександр Михайлович, Мартинюк Тетяна Борисівна, Кравченко Олександр Михайлович, Топчанюк Максим Володимирович
МПК: G06K 9/00
Мітки: образів, класифікації, пристрій
Формула / Реферат:
Пристрій для класифікації образів, який містить блок зважування, обчислювальний блок, вузол аналізу, першу групу m елементів І, де m - кількість класів класифікації образів, перша група входів блока зважування з'єднана з n входами n-вимірного образу у вигляді вхідного векторного масиву даних, друга група m х n входів з'єднана з ваговою матрицею коефіцієнтів, а m х n виходи з'єднані з відповідними входами комірок обчислювального блока, виходи...
Пристрій для розпізнавання образів
Номер патенту: 55924
Опубліковано: 27.12.2010
Автори: Бондарчук Інна Василівна, Мартинюк Тетяна Борисівна, Сачанюк-Кавецька Наталія Василівна
МПК: G06K 9/00
Мітки: розпізнавання, пристрій, образів
Формула / Реферат:
Пристрій для розпізнавання образів, що містить блок порогових елементів, блок зважування, обчислювальний блок, блок упорядкування навчальних сигналів, входи якого підключені до виходів блока порогових елементів, і блок формування цілочисельних ваг, входи якого з'єднані з відповідними виходами блока упорядкування навчальних сигналів, а виходи - з керуючими входами блока зважування, який відрізняється тим, що в нього введений блок суматорів,...
Попередній патент: Енергозберігаючий товстоплівковий нагрівальний елемент на склі
Наступний патент: Автоматизована система для проведення багатофакторного експерименту
Випадковий патент: Ковпачок для контейнерів, наприклад для пляшок або гнучких пакетів