Пристрій для захвату контейнерів
Номер патенту: 74582
Опубліковано: 12.11.2012
Автори: Переяславський Олексій Миколайович, Іванов Микола Іванович, Буковинський Олександр Леонідович

Формула / Реферат
Пристрій для захвату контейнерів з фітингами, який складається з траверси, поворотної несучої рами, жорстко закріпленої на зубчастому вінці механізму її повороту, яка взаємодіє з шестірнею мотор-редуктора з гальмом, встановлених на несучій рамі напрямних для наведення пристрою на контейнер, і чотиризахватної головки, який відрізняється тим, що на кожній захватній головці встановлений пневмоциліндр, шток якого взаємодіє з важелем, що встановлений на осі поворотної фітингової головки, робочі порожнини пневмоциліндрів з'єднані з вихідними каналами двопозиційних розподільників, вхідний канал яких підключений до пневмомагістралі, один торець золотника цих розподільників підпружинений, а другий торець з'єднаний з виходом пневматичного логічного елемента І, вхідні порожнини якого з одної сторони з'єднані з розподільником ввімкнення циліндрів, а з другої сторони - з виходом пневматичного датчика, який являє собою двопозиційний розподільник, який містить підпружинений золотник з наконечником, також наконечник пневматичного датчика має кінематичний зв'язок з кінцевим вимикачем, причому вхідні канали розподільника ввімкнення циліндрів і датчиків з'єднані з пневмомагістраллю.
Текст
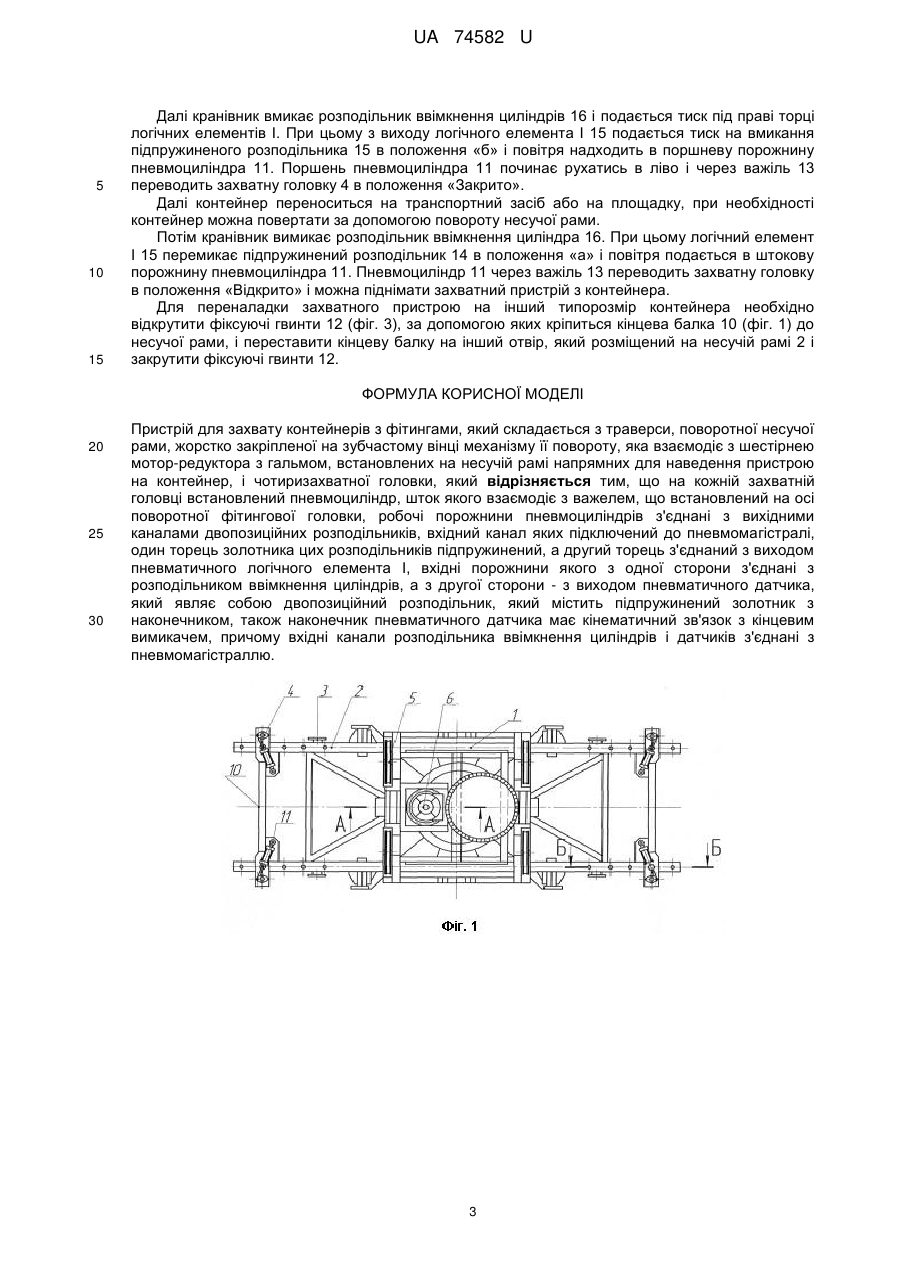
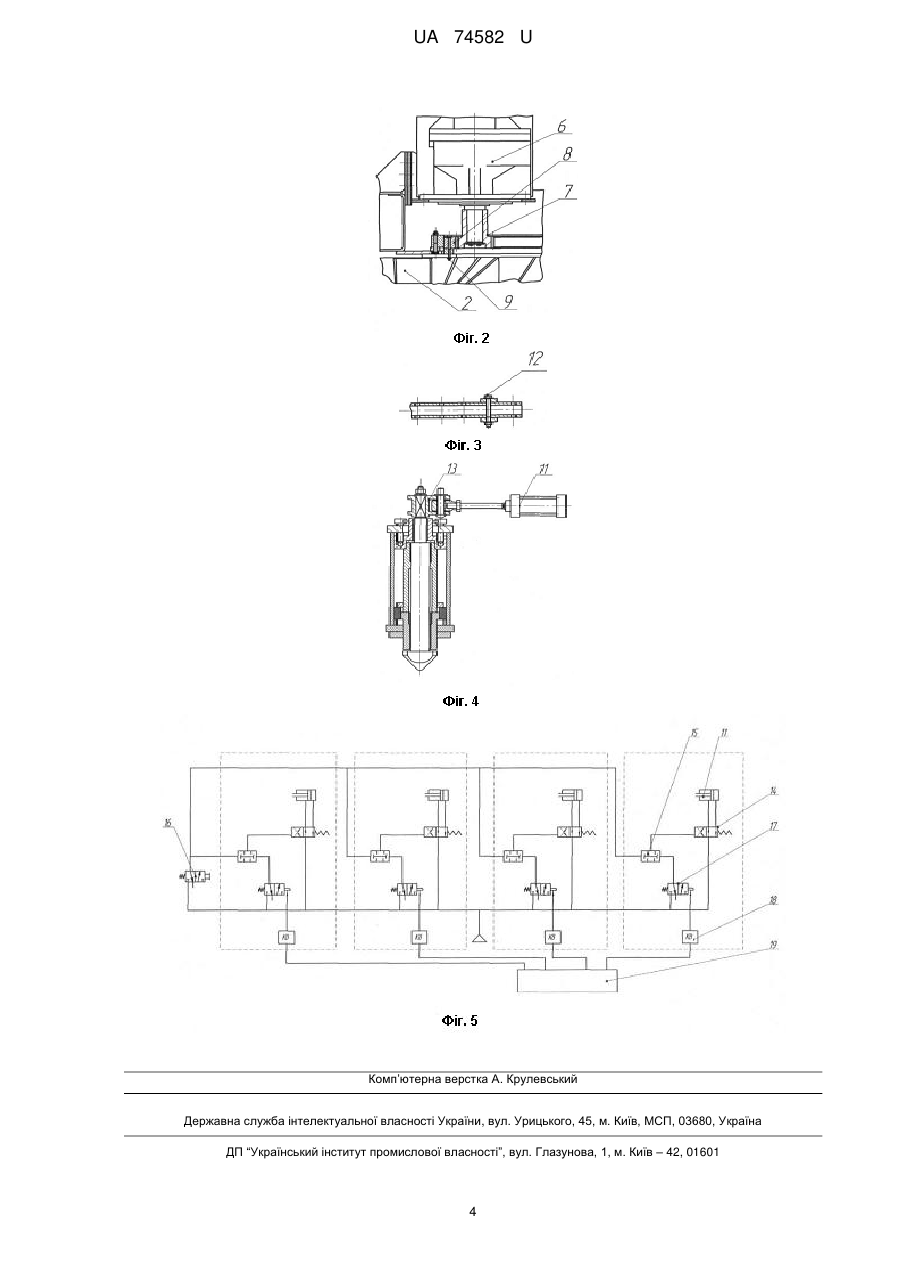
Реферат: Пристрій для захвату контейнерів з фітингами, який складається з траверси, поворотної несучої рами, зубчастого вінця, механізму її повороту, мотор-редуктора з гальмом, чотири захватні головки. На кожній захватній головці встановлений пневмоциліндр. UA 74582 U (54) ПРИСТРІЙ ДЛЯ ЗАХВАТУ КОНТЕЙНЕРІВ UA 74582 U UA 74582 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до класу підйомно-транспортного обладнання, а саме до захватних пристроїв великотоннажних контейнерів. Відомий захватний пристрій (патент RU №2309111 кл. В66С1 1/66, 2006 р.) для перевантаження великовантажних контейнерів, що складається з металевої платформи та блоків поліспаста, які скріплені між собою за допомогою опорно-поворотного пристрою. Опорноповоротний пристрій виконаний у вигляді упорно-роликового підшипника, траверсою з поворотними замками, що входять у фітинги контейнерів. Траверса виконана у вигляді коробчастої листобалкової конструкції і забезпечена підвіскою. Підвіска виконана у вигляді труби, встановленої по центру траверси жорстко і вертикально на її нижньому поясі, з верхнім поясом труба з'єднана компенсаторним кільцем. Кільце виготовлене з листа, причому між поясами і навколо труби встановлені і приварені ребра жорсткості. Верхня частина труби з'єднана за допомогою пальців, розташованих по колу горизонтально, з Г-подібною шайбою, встановленою на опорно-поворотному пристрої, закріпленому на платформі. Траверса скріплена за допомогою шпонкових з'єднань, розміщених на її верхньому і нижньому поясах, з кінцевими балками також коробчастої форми, з розміщеними в них поворотними замками і приводами їх повороту. При цьому в поздовжньому напрямку кінцеві балки скріплені з траверсою болтовими з'єднаннями, розміщеними на їхніх стінках. Недоліком даного пристрою є висока складність конструкції і, як наслідок, низька надійність та неможливість переналадки на інший тип контейнера. Найбільш близьким аналогом до заявленого є захватний пристрій для контейнерів (патент RU № 2291100 кл. В66С1/66, 2006 р.), який складається з траверси, поворотної несучої рами, встановлених на поворотній несучій рамі напрямних для наведення захватного пристрою на контейнер. Захватні головки кожної кінцевої балки забезпечені механізмом їх повороту, що складається з електроприводу, пристроїв повороту, що включає зубчастий сектор, і двох тяг, що з'єднують зубчастий сектор з захватними головками. При цьому зубчастий сектор входить в зачеплення з шестірнею тихохідного вала черв'ячного редуктора електропривода, встановленого на підмоторній плиті, привареної до кінцевої балки. Пристрій повороту і тяги розташовані зверху кінцевої балки і забезпечують кінематичний зв'язок між електроприводом і захватними головками. На подовженому швидкохідному валу черв'ячного редуктора встановлена багатодискова муфта граничного моменту. Пальці муфти входять в зачеплення з радіальними отворами пружного диска фланця вала електродвигуна, що забезпечують надійну роботу електропривода при перекосі осей його механізмів і оберігають електропривод від перевантажень. Захватні головки встановлені у відсіках по краях кінцевої балки і складаються з фітингової головки, встановленої в стаканах, і забезпечені амортизатором, розміщеним між корпусом кінцевої балки і стаканом. Після того як захватні головки увійшли в фітинги контейнера, кранівник вмикає електропривод механізму повороту захватних головок. При цьому шестірня тихохідного вала черв'ячного редуктора починає обертатися, входить в зачеплення з зубчастим сектором і за допомогою тяг повертає захватні головки до виходу з зачеплення зубчастого сектора. Недоліком даного пристрою є висока складність і, як наслідок, низька надійність в роботі, обумовлена наявністю механічного приводу і зубчастого сектора, які в процесі роботи можуть заклинювати, зубчастий сектор може виходити з зачеплення при довготривалій експлуатації. Також є можливість повороту захватних головок при перекосі їх в фітингах, що може призвести до поломки як фітингів контейнера, так і захватних головок. Складність переналагодження захватного пристрою на різні типорозміри контейнера. В основу корисної моделі поставлена задача створити пристрій для захвату контейнерів спрощеної конструкції, підвищеної надійності та з можливістю переналагодження на різні типорозміри контейнерів за рахунок того, що в захватному пристрої для контейнерів з фітингами на кожній захватній головці встановлений пневмоциліндр, шток якого взаємодіє з важелем, що встановлений на осі поворотної фітингової головки, робочі порожнини пневмоциліндрів з’єднані з вихідними каналами двопозиційних розподільників, вхідний канал яких підключений до пневмомагістралі, один торець золотника цього розподільника підпружинений, а другий торець з’єднаний з виходом пневматичного логічного елемента І, вхідні порожнини якого з одної сторони з'єднані з вихідними каналами розподільника ввімкнення циліндрів, який вмикає кранівник безпосередньо з кабіни крана, а з другої сторони - з виходом пневматичного датчика, робочий елемент якого має можливість взаємодіяти з поверхнею фітинга контейнера, причому вхідні канали розподільника ввімкнення циліндрів і датчиків з’єднані з пневмомагістраллю. Поставлена задача вирішується тим, що механічні тяги повороту захватних головок були замінені на пневмоциліндри і пневмотрубки, а електропривід, який містить мотор-редуктор і 1 UA 74582 U 5 10 15 20 25 30 35 40 45 50 55 зубчастий сектор був замінений на пневматичний привід, який складається з двопозиційних розподільників, логічних елементів І, пневматичних датчиків і розподільника ввімкнення циліндрів, була спрощена конструкція приводу повороту захватних головок. Внаслідок того, що пневматичний датчик у разі перекосу захватних головок, не подає тиск до вхідної порожнини логічного елемента І, а логічний елемент І, відповідно, не подає тиск на вмикання підпружиненого розподільника, навіть в тому разі, якщо кранівник увімкне розподільник ввімкнення циліндрів, не спрацьовує пневмоциліндр і стає неможливим поворот захватної головки, також на пневматичному датчику встановлений кінцевий вимикач, який інформує кранівника про те, чи ввійшла захватна головка в фітинг, що підвищує надійність заявленого пристрою. Внаслідок того, що пневмотрубки для підключення пневмоциліндрів є гнучкими, стало можливим швидке переналагодження повздовжніх кінцевих балок для кожного типорозміру контейнера без трудомісткого регулювання механічних тяг. Приклад виконання пристрою для захвату контейнерів показаний на кресленнях, де фіг. 1 Пристрій для захвату контейнерів; фіг. 2 - Переріз А-А на фіг. 1; фіг. 3 - Переріз Б-Б на фіг. 1; фіг. 4 - Захватна головка. Вид в розрізі; фіг. 5 - Пневматична схема пристрою. Захватний пристрій для контейнерів з фітингами (фіг. 1) містить траверсу 1, поворотну несучу раму 2, встановлені на ній напрямні 3 для наведення пристрою на контейнер, захватні головки 4. Траверса 1 складається з балок коробчастого перерізу, з'єднаних знизу в середній частині опорним листом для кріплення опори механізму повороту несучої рами 2. На траверсі 1 розміщені блоки 5 для запасовки канатів, вертикально встановлений мотор-редуктор 6 з гальмом і зубчастою шестірнею 7 (фіг. 2), що знаходиться в зачепленні з зубчастим вінцем 8 механізму повороту несучої рами 2, жорстко закріпленої за допомогою болтів 9 на зубчастому вінці 8. Несуча рама 2 складається з поздовжніх і поперечних балок коробчастого перерізу. У середній частині несучої рами до балок приварена опорна плита з отворами для кріплення її до зубчастого вінця 8 траверси 1. На виступаючих кінцях поздовжніх балок несучої рами з кожного боку закріплені швидкознімні кінцеві балки 10 за допомогою фіксуючих гвинтів 12 (фіг. 3). На кожній захватній головці встановлений пневмоциліндр 11, шток якого з'єднаний з важелем 13 (фіг. 4), який повертає захватну головку, а другий кінець пневмоциліндра шарнірно закріплений на несучій рамі. Робочі порожнини пневмоциліндра з'єднані з підпружиненим розподільником 14 (фіг. 5), вхідний канал якого підключений до пневмомагістралі, торець з однієї сторони підпружинений, а другий з'єднаний з вихідним каналом логічного елемента І 15 (фіг. 5). Вхідні порожнини кожного логічного елемента І з одної сторони з'єднані з вихідним каналом розподільника ввімкнення циліндрів 16 (фіг. 5), який перемикається з кабіни крана, а з другої сторони - з вихідним каналом пневматичного датчика 17. Пневматичний датчик 17 являє собою двопозиційний розподільник, який містить підпружинений золотник з наконечником, яким він взаємодіє з поверхнею фітинга контейнера, також наконечник пневматичного датчика має кінематичний зв'язок з кінцевим вимикачем, який під'єднується до інформаційного табло в кабіні крана. Вхідні канали розподільника ввімкнення циліндрів і пневматичних датчиків з'єднані з пневмомагістраллю. Захватний пристрій працює наступним чином. Пристрій на канатах через блоки 5 траверси (фіг. 1) підвішують на вантажний візок крана. Керування роботою захватного пристрою виконують з кабіни кранівника, де встановлено два кнопкових пости. Один пост для повороту несучої рами («Поворот вправо», «Поворот вліво»), другий пост для керування захватними головками («Закрито», «Відкрито»). При опусканні пристрою на контейнер захватні головки 4 знаходяться в відкритому положенні. При цьому кожен підпружинений розподільник 14 перебуває в положенні «а» і повітря з пневмомагістралі подається в штокову порожнину кожного пневмоциліндра 11 і шток пневмоцліндра 11 (фіг. 4) знаходиться в крайньому правому положенні, при якому захватні головки 4 залишаються у відкритому положенні. Захватний пристрій опускають на контейнер так, щоб напрямні 3 для наведення пристрою на контейнер дотикались одної з сторін контейнера, при цьому при необхідності використовують пристрій для повороту несучої рами. При успішному входженні захватних головок 4 в фітинги відбувається взаємодія золотників пневматичних датчиків 17 (фіг. 5) з поверхнями фітинга контейнера, внаслідок контакту золотника з поверхнею фітинга контейнера золотник перемикається в положення «2». При цьому відкривається доступ повітря з пневмомагісталі в ліві торці логічних елементів І і спрацьовує кінцевий вимикач 18, який подає в кабіну крана на інформаційне табло 19 сигнали про успішне входження захватних головок 4 в фітинги. 2 UA 74582 U 5 10 15 Далі кранівник вмикає розподільник ввімкнення циліндрів 16 і подається тиск під праві торці логічних елементів І. При цьому з виходу логічного елемента І 15 подається тиск на вмикання підпружиненого розподільника 15 в положення «б» і повітря надходить в поршневу порожнину пневмоциліндра 11. Поршень пневмоциліндра 11 починає рухатись в ліво і через важіль 13 переводить захватну головку 4 в положення «Закрито». Далі контейнер переноситься на транспортний засіб або на площадку, при необхідності контейнер можна повертати за допомогою повороту несучої рами. Потім кранівник вимикає розподільник ввімкнення циліндра 16. При цьому логічний елемент І 15 перемикає підпружинений розподільник 14 в положення «а» і повітря подається в штокову порожнину пневмоциліндра 11. Пневмоциліндр 11 через важіль 13 переводить захватну головку в положення «Відкрито» і можна піднімати захватний пристрій з контейнера. Для переналадки захватного пристрою на інший типорозмір контейнера необхідно відкрутити фіксуючі гвинти 12 (фіг. 3), за допомогою яких кріпиться кінцева балка 10 (фіг. 1) до несучої рами, і переставити кінцеву балку на інший отвір, який розміщений на несучій рамі 2 і закрутити фіксуючі гвинти 12. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 Пристрій для захвату контейнерів з фітингами, який складається з траверси, поворотної несучої рами, жорстко закріпленої на зубчастому вінці механізму її повороту, яка взаємодіє з шестірнею мотор-редуктора з гальмом, встановлених на несучій рамі напрямних для наведення пристрою на контейнер, і чотиризахватної головки, який відрізняється тим, що на кожній захватній головці встановлений пневмоциліндр, шток якого взаємодіє з важелем, що встановлений на осі поворотної фітингової головки, робочі порожнини пневмоциліндрів з'єднані з вихідними каналами двопозиційних розподільників, вхідний канал яких підключений до пневмомагістралі, один торець золотника цих розподільників підпружинений, а другий торець з'єднаний з виходом пневматичного логічного елемента І, вхідні порожнини якого з одної сторони з'єднані з розподільником ввімкнення циліндрів, а з другої сторони - з виходом пневматичного датчика, який являє собою двопозиційний розподільник, який містить підпружинений золотник з наконечником, також наконечник пневматичного датчика має кінематичний зв'язок з кінцевим вимикачем, причому вхідні канали розподільника ввімкнення циліндрів і датчиків з'єднані з пневмомагістраллю. 3 UA 74582 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for gripping containers
Автори англійськоюIvanov Mykola Ivanovych, Pereyaslavskyi Oleksiy Mykolaiovych, Bukovynskyi Oleksandr Leonidovych
Назва патенту російськоюУстройство для захвата контейнеров
Автори російськоюИванов Николай Иванович, Переяславский Алексей Николаевич, Буковинский Александр Леонидович
МПК / Мітки
МПК: B66C 1/66
Мітки: захвату, пристрій, контейнерів
Код посилання
<a href="https://ua.patents.su/6-74582-pristrijj-dlya-zakhvatu-kontejjneriv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для захвату контейнерів</a>
Універсальний автоматичний захватний пристрій для контейнерів
Номер патенту: 77262
Опубліковано: 15.11.2006
Автори: Леонов Олександр Михайлович, Іванов Олег Миколайович
Мітки: автоматичний, захватний, універсальний, контейнерів, пристрій
Формула / Реферат:
Універсальний автоматичний захватний пристрій для контейнерів, що містить несучу раму з напрямними для наведення на контейнер, захватні органи, які розміщені по кутах несучої рами і установлені з можливістю повороту навколо вертикальної осі, механізм повороту захватних органів, що містить порожнистий циліндр, установлений в центрі рами, і розташований всередині порожнистого циліндра привантажений шток з двома поздовжніми пазами, зміщеними на...
Універсальний автоматичний захватний пристрій для контейнерів
Номер патенту: 6476
Опубліковано: 16.05.2005
Автори: Іванов Олег Миколайович, Леонов Олександр Михайлович
МПК: B66C 1/62
Мітки: пристрій, контейнерів, захватний, автоматичний, універсальний
Формула / Реферат:
Універсальний автоматичний захватний пристрій для контейнерів, що містить несучу раму з напрямними для наведення на контейнер, захватні органи, які розміщені по кутах несучої рами і установлені поворотними навколо вертикальної осі, механізм повороту захватних органів, що містить порожнистий циліндр, установлений в центрі рами, і розташований всередині порожнистого циліндра привантажений шток з двома поздовжніми пазами, зміщеними на 90° один...
Захоплювальний пристрій для контейнерів
Номер патенту: 85961
Опубліковано: 10.03.2009
Автори: Іванов Олег Миколайович, Іванова Анастасія Олегівна
МПК: B66C 1/62
Мітки: контейнерів, пристрій, захоплювальний
Формула / Реферат:
Захоплювальний пристрій для контейнерів, що містить раму, розташовані по кутах рами поворотні захоплювальні кулачкові елементи, привід повороту поворотних захоплювальних кулачкових елементів, що містить встановлений в центрі рами порожнистий циліндр, розташований всередині циліндра шток з привантаженням, виконаний з розташованими на його зовнішній поверхні під кутом 90° один до одного подовжніми пазами, з'єднаними між собою гвинтовими пазами,...
Непривідний пристрій для перевертання контейнерів
Номер патенту: 88511
Опубліковано: 26.10.2009
Автори: Іванова Анастасія Олегівна, Іванов Микола Степанович
МПК: B66C 1/00, B65G 65/23
Мітки: пристрій, контейнерів, непривідний, перевертання
Формула / Реферат:
Непривідний пристрій для перевертання контейнерів, який відрізняється тим, що містить балку, на якій шарнірно встановлені серги з підхватом для вантажопідйомного механізму, а по краях балки на осях встановлені блоки з вантажними стропами, що з'єднані з автоматичним захватом контейнерів і через нього - з підстропниками, що проходять по направляючих блоках та пов'язані з лебідками, причому перший підстропник з першою лебідкою, другий - з...
Захватний пристрій для контейнерів

Номер патенту: 33916
Опубліковано: 16.06.2003
Автори: Іванов Микола Степанович, Іванов Олег Миколайович
МПК: B66C 1/62
Мітки: захватний, пристрій, контейнерів
Формула / Реферат:
Захватний пристрій для контейнерів, який містить раму, розташовані по кутах рами поворотні навколо вертикальної осі захватні органи, привід повороту захватних органів, що включає установлений в центрі рами порожній циліндр, розташований всередині циліндра шток з привантаженням, виконаний на зовнішній поверхні з розташованими під кутом 90° один до одного подовжніми пазами, з'єднаними між собою гвинтовими пазами, розміщений на циліндрі та...
Попередній патент: Концентрат дезінфікуючої речовини
Наступний патент: Спосіб управління багатоступінчатим водовідливом шахт
Випадковий патент: Спосіб прогнозування вторинних імунодепресій у онкологічних хворих