Захватний пристрій для контейнерів
Номер патенту: 33916
Опубліковано: 16.06.2003

Формула / Реферат
Захватний пристрій для контейнерів, який містить раму, розташовані по кутах рами поворотні навколо вертикальної осі захватні органи, привід повороту захватних органів, що включає установлений в центрі рами порожній циліндр, розташований всередині циліндра шток з привантаженням, виконаний на зовнішній поверхні з розташованими під кутом 90° один до одного подовжніми пазами, з'єднаними між собою гвинтовими пазами, розміщений на циліндрі та установлений в пазах штока підпружинений штифт, рими з пазами, шківи, що розміщені на захватних органах, огинаючий циліндр, шківи захватних органів, трос, гнучку тягу, блоки, одні з яких розташовані на нижньому кінці і боковій поверхні циліндра, другі - на рамі в центрі і двох суміжних кутах, причому гнучка тяга послідовно огинає кутові блоки рами, центральні блоки і блоки циліндра, який відрізняється тим, що рими з пазами додатково забезпечені вилками, які шарнірно зв'язані осями з вушками, що жорстко закріплені на рамі.
Текст
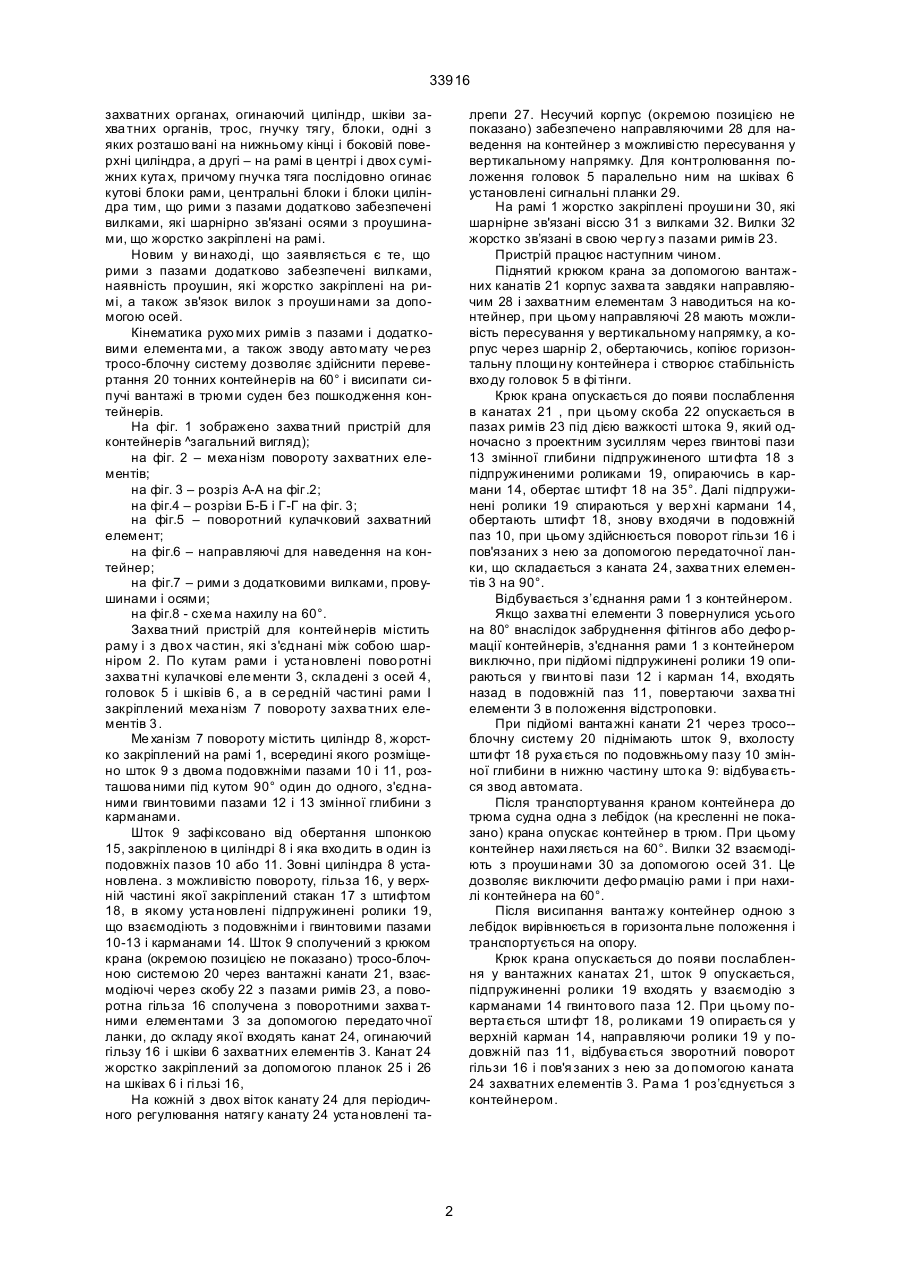
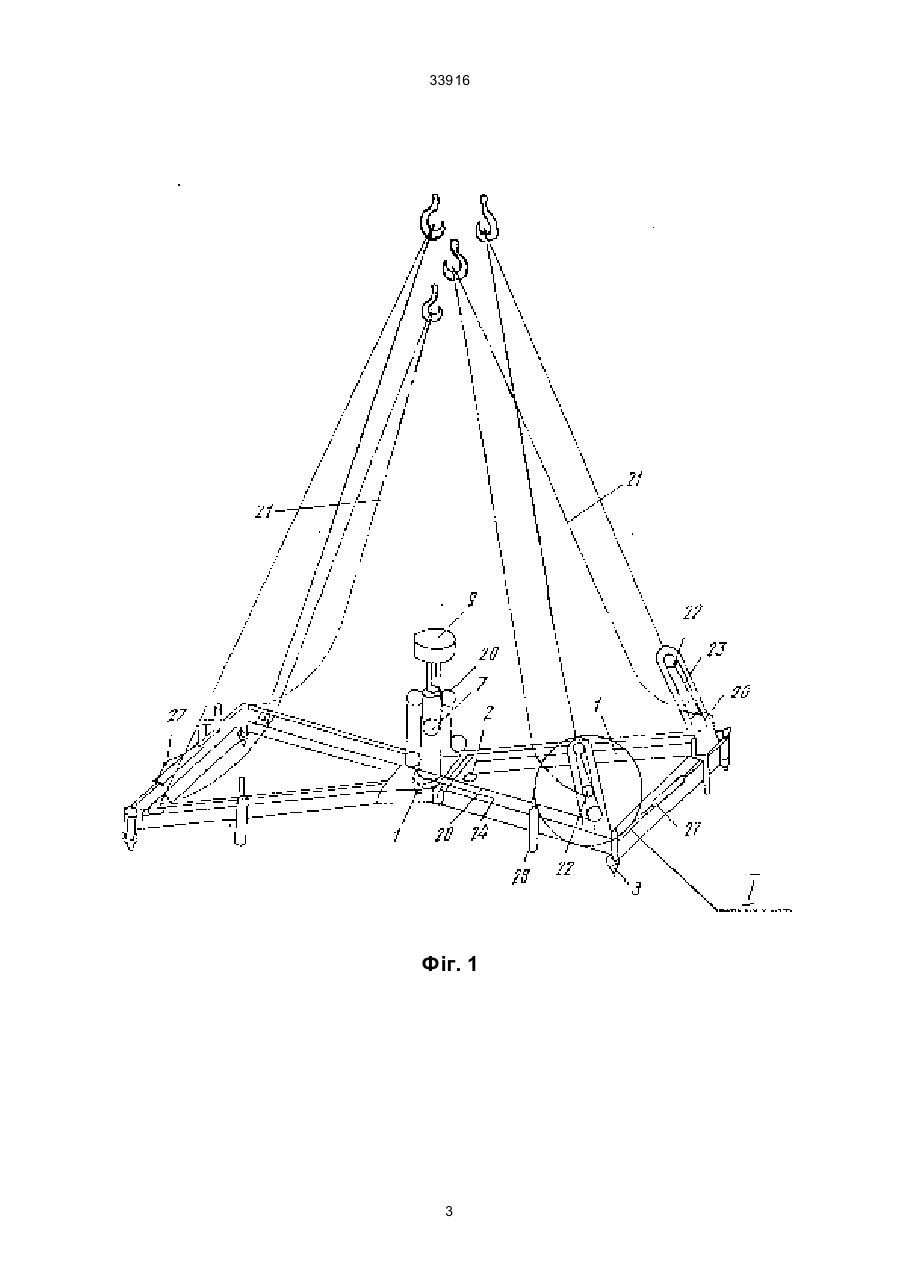
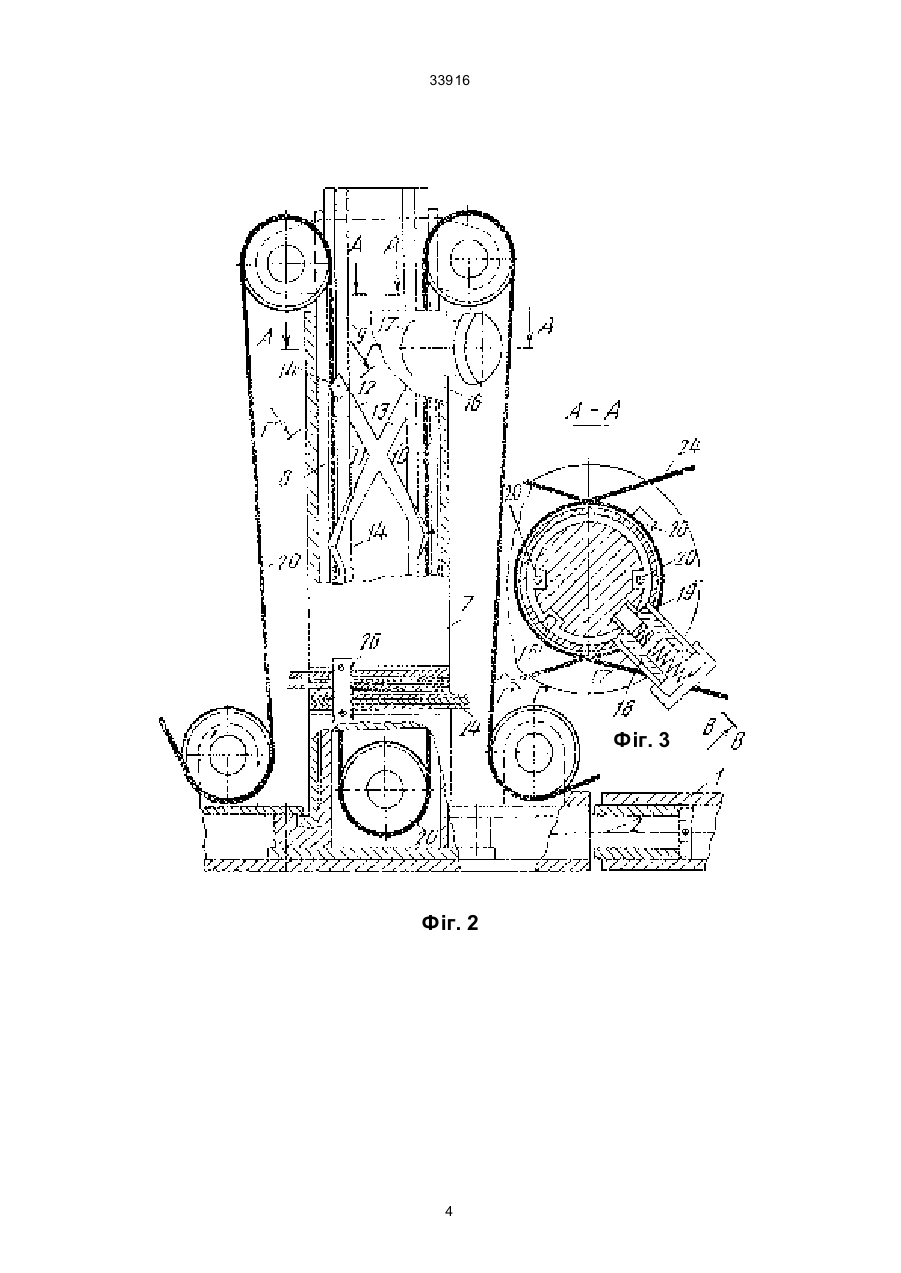
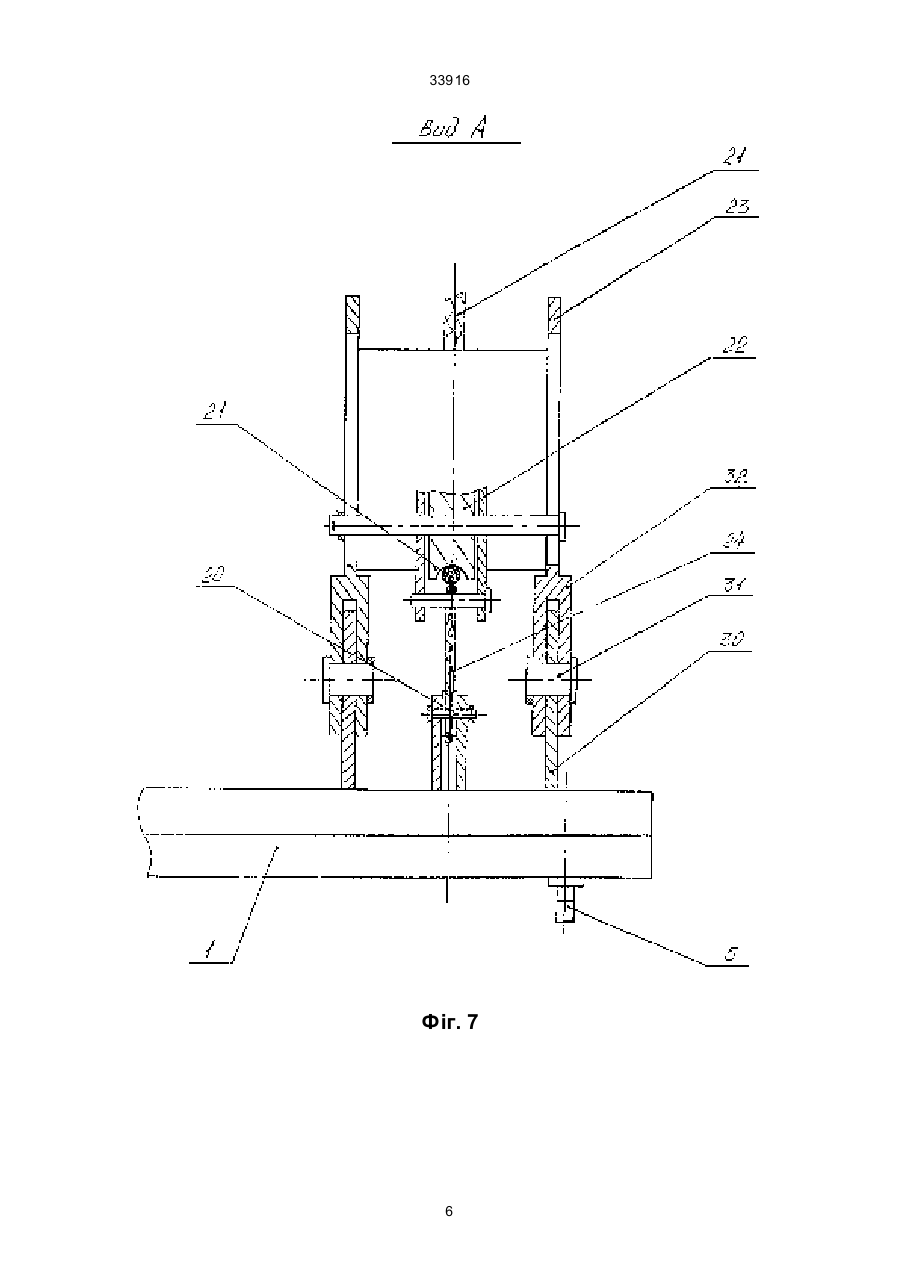
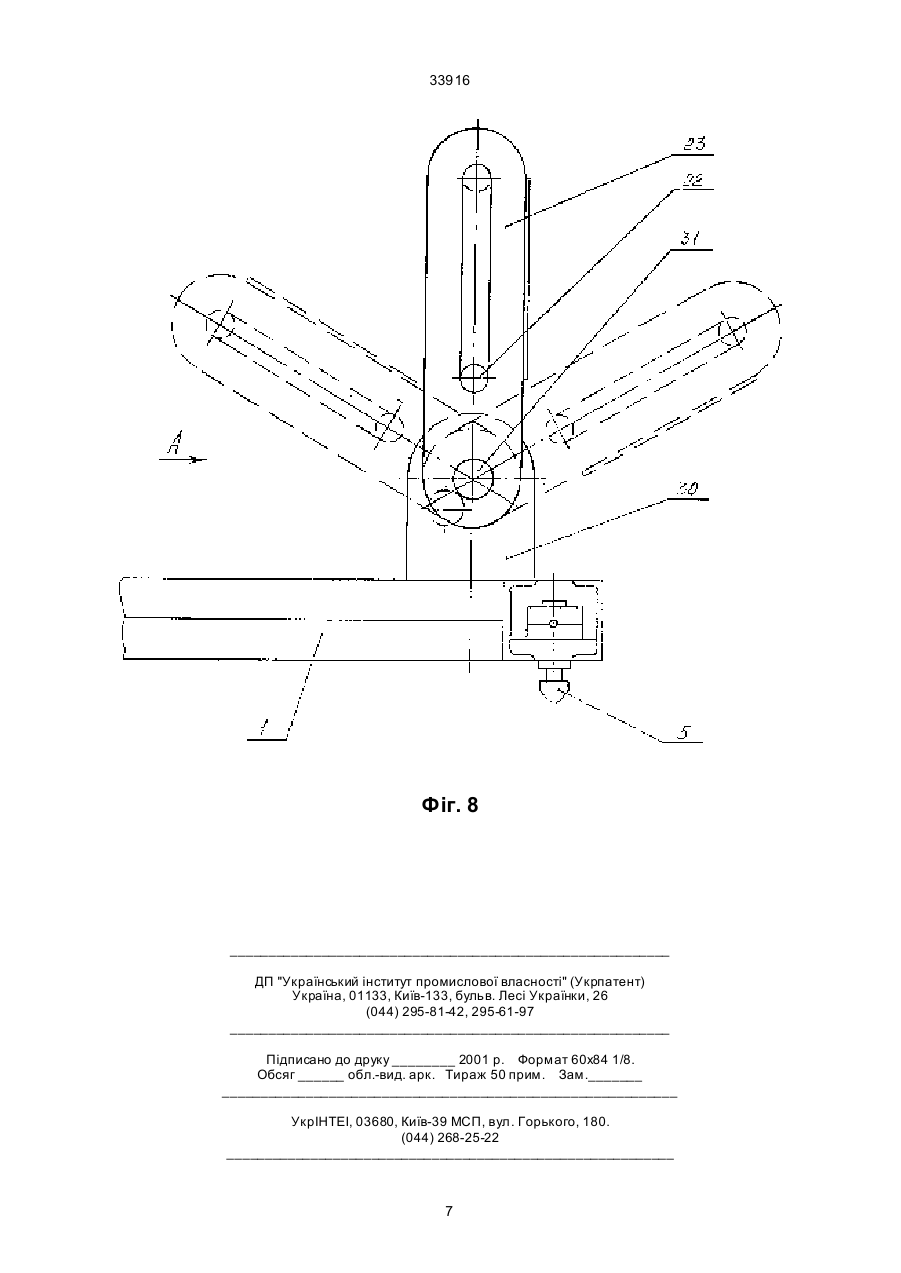
Захватний пристрій для контейнерів, який містить раму. розташовані по кутам рами поворотні навколо вертикальної осі захватні органи, привод повороту захва тних органів, вивча ючий установлений в центрі рами порожній циліндр, розташований веере. дені циліндра ток, з прива нтаженням, 33916 захватних органах, огинаючий циліндр, шківи захва тних органів, трос, гнучку тягу, блоки, одні з яких розташо вані на нижньому кінці і боковій поверхні циліндра, а другі – на рамі в центрі і двох суміжних кута х, причому гнучка тяга послідовно огинає кутові блоки рами, центральні блоки і блоки циліндра тим, що рими з пазами додатково забезпечені вилками, які шарнірно зв'язані осями з проушинами, що жорстко закріплені на рамі. Новим у ви нахо ді, що заявляється є те, що рими з пазами додатково забезпечені вилками, наявність проушин, які жорстко закріплені на римі, а також зв'язок вилок з проуши нами за допомогою осей. Кінематика рухо мих римів з пазами і додатковими елемента ми, а також зводу авто мату че рез тросо-блочну систему дозволяє здійснити перевертання 20 тонних контейнерів на 60° і висипати сипучі вантажі в трюми суден без пошкодження контейнерів. На фіг. 1 зображено захва тний пристрій для контейнерів ^загальний вигляд); на фіг. 2 – меха нізм повороту захватних елементів; на фіг. 3 – розріз А-А на фіг.2; на фіг.4 – розрізи Б-Б і Г-Г на фіг. 3; на фіг.5 – поворотний кулачковий захватний елемент; на фіг.6 – направляючі для наведення на контейнер; на фіг.7 – рими з додатковими вилками, провушинами і осями; на фіг.8 - схе ма нахилу на 60°. Захва тний пристрій для контей нерів містить раму і з дво х ча стин, які з'єднані між собою шарніром 2. По кутам рами і уста новлені пово ротні захва тні кулачкові еле менти 3, скла дені з осей 4, головок 5 і шківів 6 , а в се редній частині рами І закріплений меха нізм 7 повороту захва тних елементів 3 . Ме ханізм 7 повороту містить циліндр 8, жорстко закріплений на рамі 1, всередині якого розміщено шток 9 з двома подовжніми пазами 10 і 11, розташова ними під кутом 90° один до одного, з'єднаними гвинтовими пазами 12 і 13 змінної глибини з карманами. Шток 9 зафі ксовано від обертання шпонкою 15, закріпленою в циліндрі 8 і яка вхо дить в один із подовжніх пазов 10 або 11. Зовні циліндра 8 установлена. з можливістю повороту, гільза 16, у верхній частині якої закріплений стакан 17 з штифтом 18, в якому уста новлені підпружинені ролики 19, що взаємодіють з подовжніми і гвинтовими пазами 10-13 і карманами 14. Шток 9 сполучений з крюком крана (окремою позицією не показано) тросо-блочною системою 20 через вантажні канати 21, взаємодіючі через скобу 22 з пазами римів 23, а поворотна гільза 16 сполучена з поворотними захва тними елементами 3 за допомогою передато чної ланки, до складу якої входять канат 24, огинаючий гільзу 16 і шківи 6 захватних елементів 3. Канат 24 жорстко закріплений за допомогою планок 25 і 26 на шківах 6 і гі льзі 16, На кожній з двох віток канату 24 для періодичного регулювання натягу канату 24 уста новлені та лрепи 27. Несучий корпус (окремою позицією не показано) забезпечено направляючими 28 для наведення на контейнер з можливі стю пересування у вертикальному напрямку. Для контролювання положення головок 5 паралельно ним на шківах 6 установлені сигнальні планки 29. На рамі 1 жорстко закріплені проуши ни 30, які шарнірне зв'язані віссю 31 з вилками 32. Вилки 32 жорстко зв’язані в свою чер гу з пазами римів 23. Пристрій працює наступним чином. Піднятий крюком крана за допомогою вантаж них канатів 21 корпус захва та завдяки направляючим 28 і захватним елементам 3 наводиться на контейнер, при цьому направляючі 28 мають можливість пересування у вертикальному напрямку, а корпус через шарнір 2, обертаючись, копіює горизонтальну площи ну контейнера і створює стабільність вхо ду головок 5 в фі тінги. Крюк крана опускається до появи послаблення в канатах 21 , при цьому скоба 22 опускається в пазах римів 23 під дією важкості штока 9, який одночасно з проектним зусиллям через гвинтові пази 13 змінної глибини підпружиненого шти фта 18 з підпружиненими роликами 19, опираючись в кармани 14, обертає штифт 18 на 35°. Далі підпружинені ролики 19 спираються у вер хні кармани 14, обертають штифт 18, знову входячи в подовжній паз 10, при цьому здійснюється поворот гільзи 16 і пов'язаних з нею за допомогою передаточної ланки, що складається з каната 24, захва тних елементів 3 на 90°. Відбувається з’єднання рами 1 з контейнером. Якщо захва тні елементи 3 повернулися усього на 80° внаслідок забруднення фітінгов або дефо рмації контейнерів, з'єднання рами 1 з контейнером виключно, при підйомі підпружинені ролики 19 опираються у гви нто ві пази 12 і карман 14, входять назад в подовжній паз 11, повертаючи захва тні елементи 3 в положення відстроповки. При підйомі ванта жні канати 21 через тросо-блочну систему 20 піднімають шток 9, вхолосту шти фт 18 руха ється по подовжньому пазу 10 змінної глибини в нижню частину што ка 9: відбува ється звод автомата. Після транспортування краном контейнера до трюма судна одна з лебідок (на кресленні не показано) крана опускає контейнер в трюм. При цьому контейнер нахи ляється на 60°. Вилки 32 взаємодіють з проуши нами 30 за допомогою осей 31. Це дозволяє виключити дефо рмацію рами і при нахилі контейнера на 60°. Після висипання ванта жу контейнер одною з лебідок вирівнюється в горизонта льне положення і транспортується на опору. Крюк крана опускається до появи послаблення у вантажних канатах 21, шток 9 опускається, підпружиненні ролики 19 входять у взаємодію з карманами 14 гвинто вого паза 12. При цьому поверта ється шти фт 18, ро ликами 19 опираєть ся у верхній карман 14, направляючи ролики 19 у подовжній паз 11, відбува ється зворотний поворот гільзи 16 і пов'я заних з нею за до помогою каната 24 захватних елементів 3. Ра ма 1 роз’єднується з контейнером. 2 33916 Фіг. 1 3 33916 Фіг. 3 Фіг. 2 4 33916 Фіг. 4 Фіг. 5 Фіг. 6 5 33916 Фіг. 7 6 33916 Фіг. 8 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 7
ДивитисяДодаткова інформація
Назва патенту англійськоюGripping mechanism for containers
Автори англійськоюIvanov Mykola Stepanovych, Ivanov Oleh Mykolaiovych
Назва патенту російськоюЗахватное устройство для контейнеров
Автори російськоюИванов Николай Степанович, Иванов Олег Николаевич
МПК / Мітки
МПК: B66C 1/62
Мітки: захватний, контейнерів, пристрій
Код посилання
<a href="https://ua.patents.su/7-33916-zakhvatnijj-pristrijj-dlya-kontejjneriv.html" target="_blank" rel="follow" title="База патентів України">Захватний пристрій для контейнерів</a>
Захватний пристрій

Номер патенту: 35952
Опубліковано: 16.04.2001
Автори: Давигора Вадим Миколайович, Пасічник Віталій Анатолійович, Сімута Роман Русланович
МПК: B25J 15/00
Формула / Реферат:
1. Захватний пристрій, що містить корпус, виконаний з можливістю кріплення до складального інструмента, захватно-базуючий механізм, механізм подачі деталей, що складаються, і інструмент для загвинчування деталей, який відрізняється тим, що в корпусі виконано отвір з багатозахідною нарізкою, a захватно-базуючий механізм виконаний із гвинтових дротиків, розміщених в канавках багатозахідної нарізки з можливістю обмеженого переміщення в площині,...
Захватний пристрій для транспортування і кантування ланок рейкошпальної решітки
Номер патенту: 3798
Опубліковано: 27.12.1994
Автор: Лазоренко Микола Семенович
МПК: B66C 1/10
Мітки: рейкошпальної, пристрій, транспортування, кантування, захватний, ланок, решітки
Формула / Реферат:
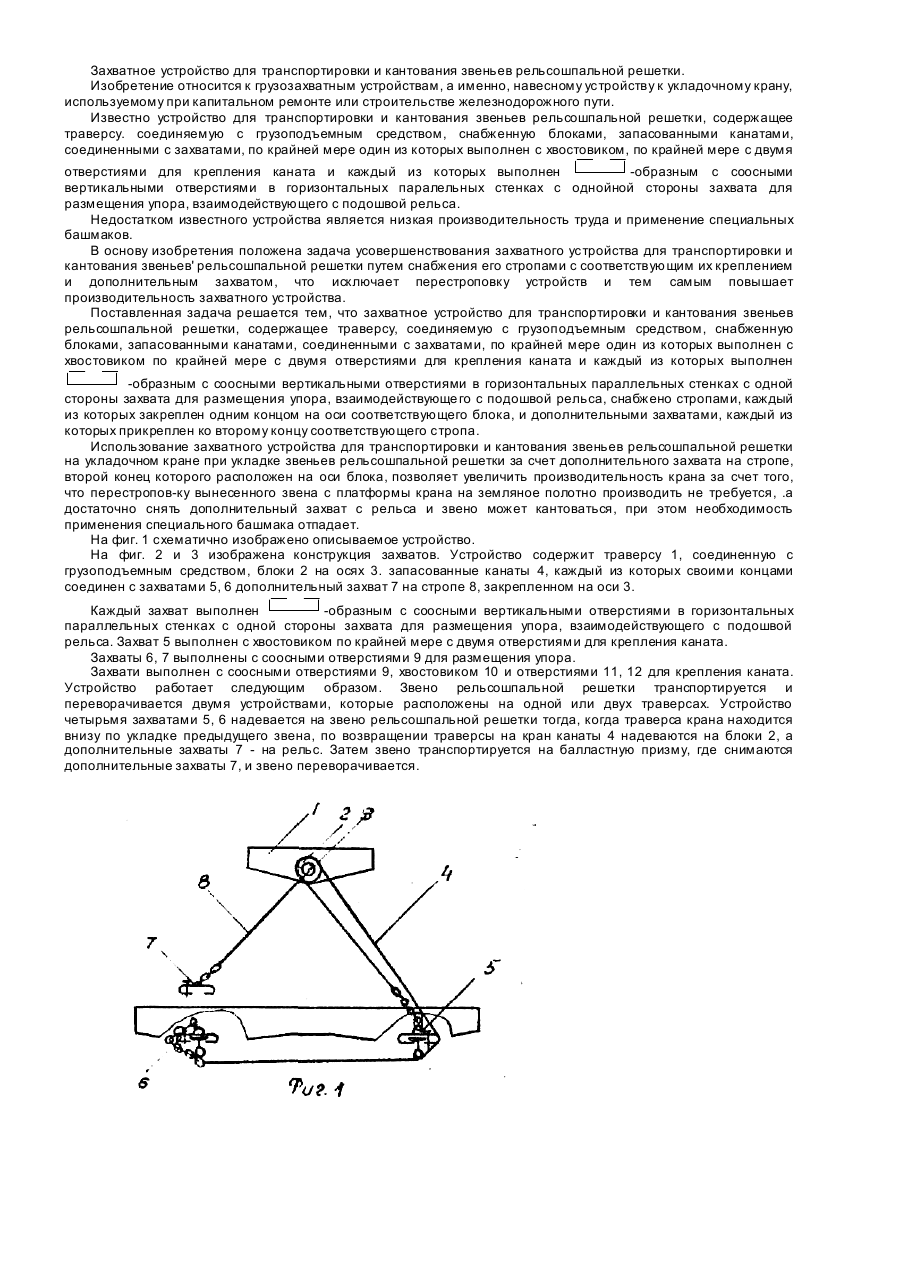
Захватное устройство для транспортировки и кантования звеньев рельсошпальной решетки, содержащее траверсу, соединяемую с грузоподъемным средством, снабженную блоками, запакованными канатами, соединенными с захватами, по крайней мере один из которых выполнен с хвостовиком по крайней мере с двумя отверстиями для крепления каната и каждый из которых выполнен -образным с...
Пристрій для розвантажування контейнерів в кузов сміттєвоза
Номер патенту: 39285
Опубліковано: 15.06.2001
Автори: Павлик Михайло Федорович, Петраков Іван Володимирович, Стельмашенко Анатолій Іванович, Подольський Юхим Аврамович
МПК: B65F 3/02
Мітки: пристрій, сміттєвоза, кузов, розвантажування, контейнерів
Формула / Реферат:
Пристрій для розвантажування контейнерів в кузов сміттєвоза, який містить в собі маніпулятор у вигляді шарнірно зчленованої з рамою сміттєвоза стріли і шарнірно закріплений на неї з можливістю поворота у вертикальній площині захват для контейнерів, кришку для закривання контейнера, кришку для закривання завантажувального отвору в кузові сміттєвоза, і гідроциліндри для управління відповідно стрілою, захватом і кришкою, який відрізняється тим,...
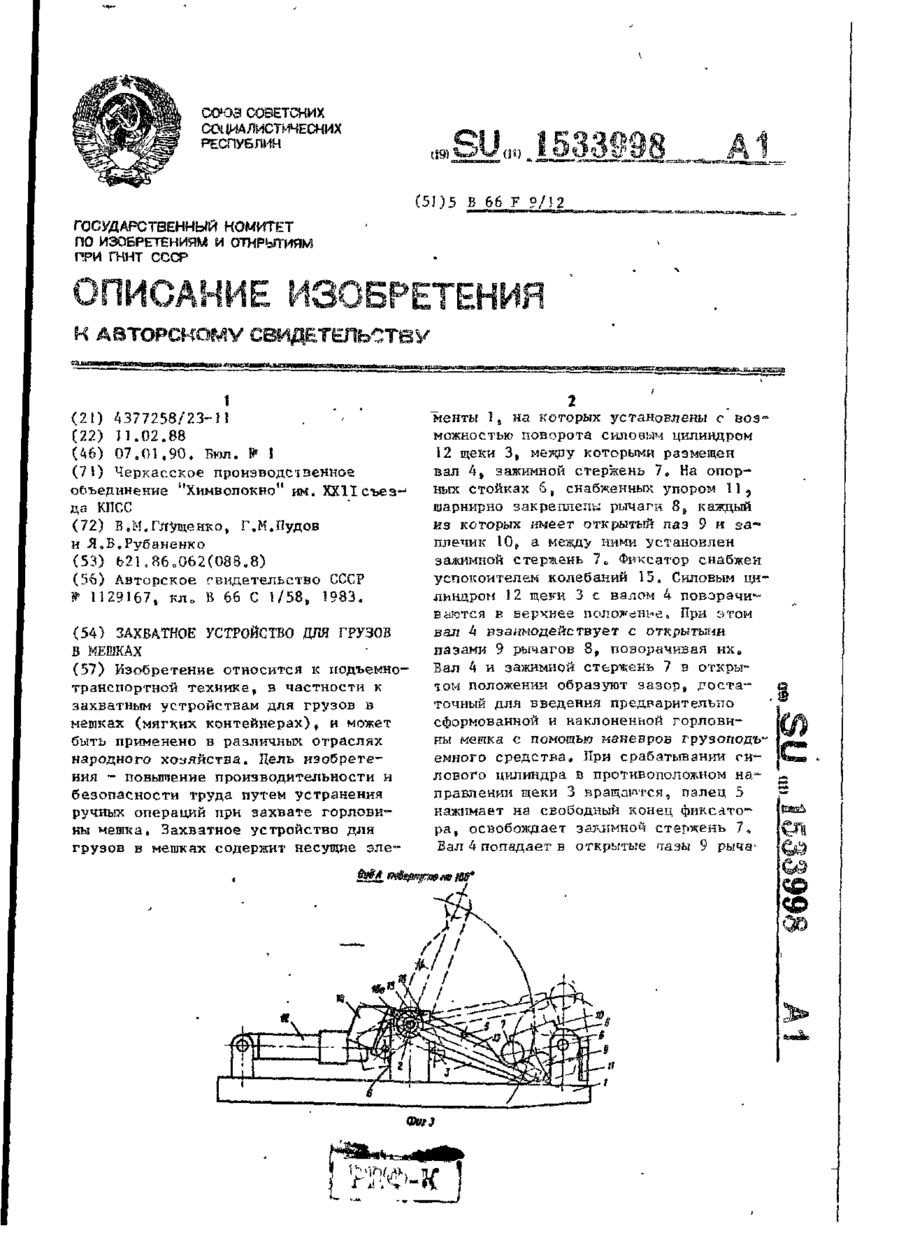
Захватний пристрій для вантажів в мішках
Номер патенту: 3713
Опубліковано: 27.12.1994
Автори: Пудов Герман Михайлович, Глущенко Віктор Михайлович, Рубаненко Яків Борисович
МПК: B66F 9/12
Мітки: захватний, вантажів, мішках, пристрій
Формула / Реферат:
1. Захватное устройство для грузов в мeшках, содержащее несущие элементы, в средней части которых закреплены опоры, на которых с возможностью поворота приводом относительно горизонтальной оси установлены щеки, соединенные между собой валом, зажимной стержень, отличающееся тем, что, с целью повышения производительности и безопасности труда путем устранения ручных операций при захвате горловины мешка, оно снабжено фиксатором и размещенными...
Захватний пристрій

Номер патенту: 2845
Опубліковано: 26.12.1994
Автори: Комащенко Віталій Іванович, Федоренко Павло Йосипович, Черконос Анатолій Іванович, Великий Михайло Ізраілевич, Черконос Оксана Анатоліївна, Димченко Олег Васильович
МПК: B66C 1/22
Формула / Реферат:
1. Захватное устройство, содержащее трос, концы которого связаны с подвеской для крюка подъемной машины, изогнутые от вертикальной оси симметрии захватные органы, связанные с ними и закрепленные на горизонтальных осях с возможностью перемещения по тросу ролики, отличающееся тем, что, с целью повышения надежности захвата груза с углублениями на боковых поверхностях, связь роликов с захватными органами выполнена в виде планок, расположенных...
Попередній патент: Засіб впливу на організм
Наступний патент: Пристрій для електропунктурної діагностики
Випадковий патент: Спосіб діагностики аутоімунного ураження печінки, переважно у дітей та підлітків