Універсальний автоматичний захватний пристрій для контейнерів
Номер патенту: 6476
Опубліковано: 16.05.2005
Автори: Леонов Олександр Михайлович, Іванов Олег Миколайович
Формула / Реферат
Універсальний автоматичний захватний пристрій для контейнерів, що містить несучу раму з напрямними для наведення на контейнер, захватні органи, які розміщені по кутах несучої рами і установлені поворотними навколо вертикальної осі, механізм повороту захватних органів, що містить порожнистий циліндр, установлений в центрі рами, і розташований всередині порожнистого циліндра привантажений шток з двома поздовжніми пазами, зміщеними на 90° один відносно одного і з'єднаними між собою гвинтовими пазами, підпружинений штифт, розташований на порожнистому циліндрі і установлений в пазах привантаженого штока, шківи, які розміщені на захватних органах, і з'єднувальний елемент, який відрізняється тим, що пристрій додатково забезпечений двома поперечними коробчастими балками, установленими з можливістю вертикального пересування у двох шахтах, виконаних в корпусі несучої рами, а також траверсою, яка жорстко з'єднана з двома коробчастими балками і сполучена тягою з привантаженим штоком захватних органів.
Текст
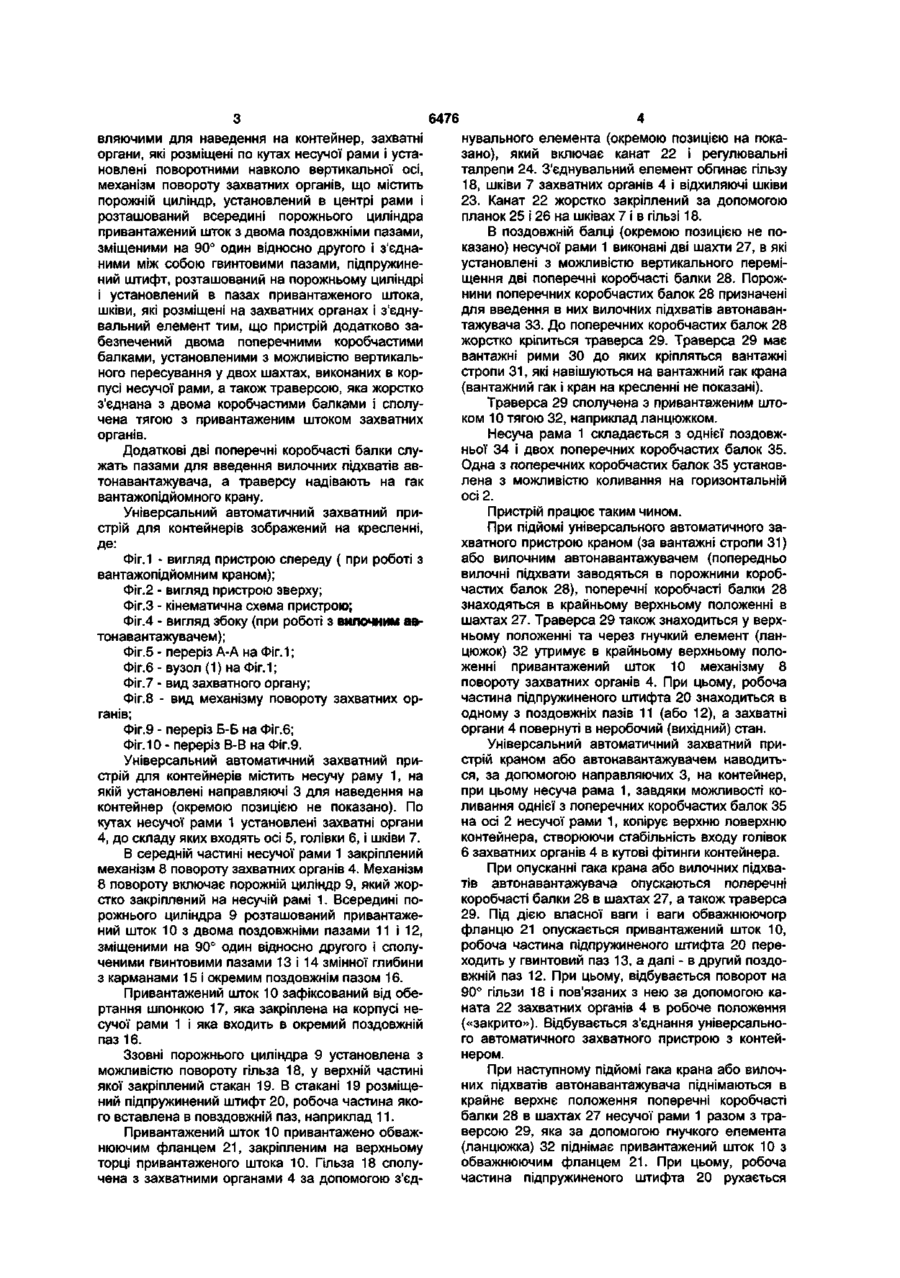
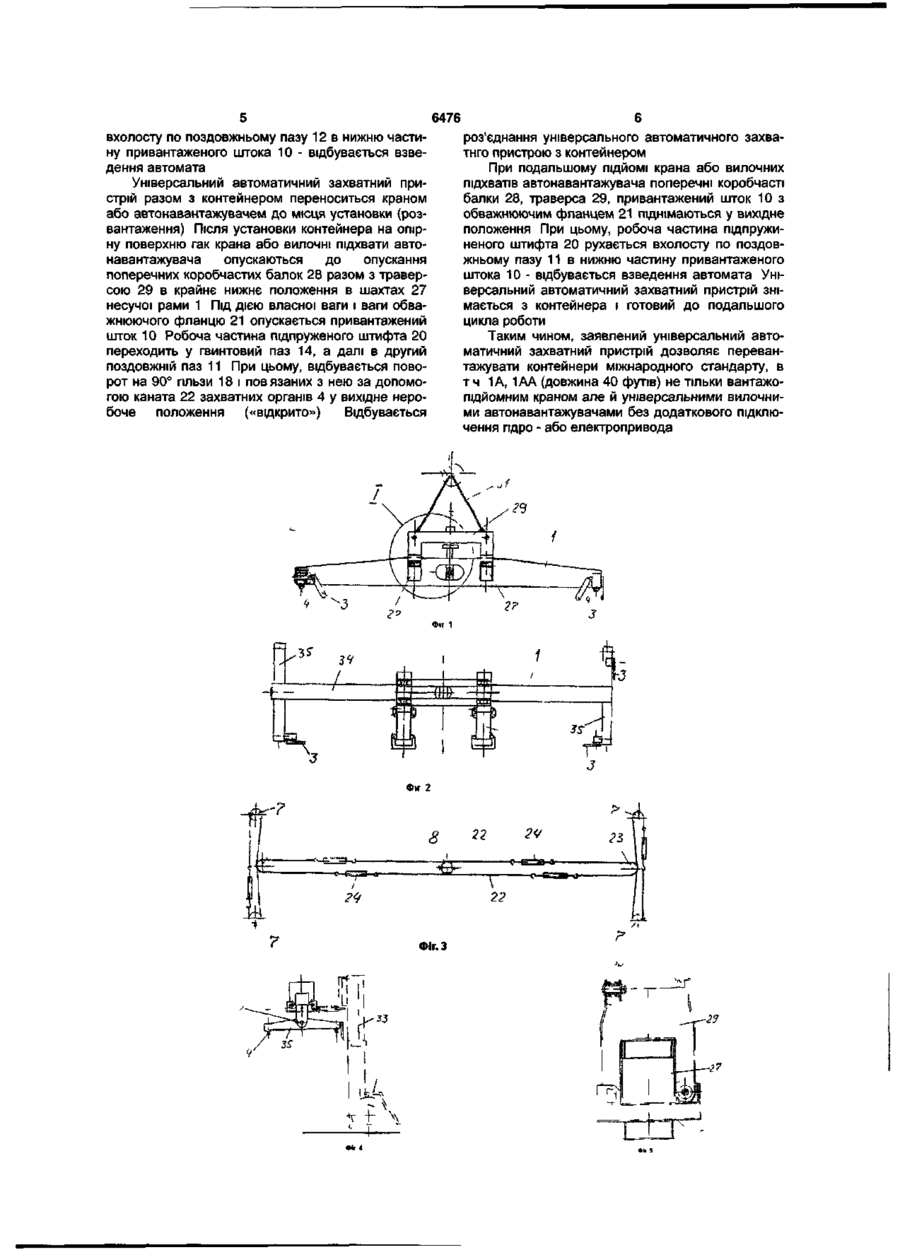
Універсальний автоматичний захватний пристрій для контейнерів, що містить несучу раму з напрямними для наведення на контейнер, захватні органи, які розміщені по кутах несучої рами і установлені поворотними навколо вертикальної осі, механізм повороту захватних органів, що містить порожнистий циліндр, установлений в центрі рами, і розташований всередині порожнистого циліндра привантажений шток з двома поздовжніми пазами, зміщеними на 90° один відносно одного і з'єднаними між собою гвинтовими пазами, підпружинений штифт, розташований на порожнистому циліндрі і установлений в пазах привантаженого штока, шківи, які розміщені на захватних органах, і з'єднувальний елемент, який відрізняється тим, що пристрій додатково забезпечений двома поперечними коробчастими балками, установленими з можливістю вертикального пересування у двох шахтах, виконаних в корпусі несучої рами, а також траверсою, яка жорстко з'єднана з двома коробчастими балками і сполучена тягою з привантаженим штоком захватних органів. Корисна модель відноситься до вантажозахватних пристроїв для перевантаження контейнерів міжнародного стандарта, в т.ч. 1А, 1АА, довжиною 40 футів. Найбільш близьким за технічною суттю є захватний пристрій для контейнерів, що містить несучу раму, розташовані по кутам рами поворотні навколо вертикальної* осі захватні органи, привод повороту захватних органів, що включає установлений в центрі рами порожнистий циліндр, розташований в середині циліндра шток з привантажем і виконаний на зовнішній поверхні з розташованими під кутом 90° друг до друга поздовжніми пазами, сполученими між собою гвинтовими пазами. На циліндрі в пазах штока установлений підпружинений штифт. На захватних органах розміщені шківи. Трос обгинає циліндр і шківи захватних органів. Крім того, пристрій має гнучку тягу і блоки, одні з яких розміщені на нижньому кінці і боковій поверхні циліндра, а другі - на рамі, по центру і двох суміжних кутах. Гнучка тяга послідовно обгинає кутові блоки рами, центральні блоки і блоки циліндра [див. авторське свідоцтво СРСР №1726356, 1992р]. Дане рішення обране прототипом. Прототип співпадає з пристроєм, що заявляється, в наявності спільних ознак; - несуча рама з направляючими для наведення на контейнер; - захватні органи, які розміщені по кутах рами і установлені поворотними навколо вертикальної осі; - механізм повороту захватних органів, який включає порожній циліндр, що установлений у центрі рами, розташований всередині циліндра привантажений шток; - привантажений шток виконаний з розташованими під кутом 90° друг до друга поздовжніми пазами, які сполучені між собою гвинтовими пазами; - підпружинений штифт, розташований на порожньому циліндрі і установлений в пазах привантаженого штока; - шківи, які розміщені на захватних органах; - трос, який обгинає циліндр і захватні органи; - з'єднувальний елемент. Але відомий пристрій дозволяє перевантажувати контейнери міжнародного стандарту тільки за допомогою вантажопідйомних кранів. Його не можна використовувати при роботі з автонавантажувачами. В основу корисної моделі поставлено задачу створити універсальний автоматичний захватний пристрій, в якому, за рахунок додаткового забезпечення його поперечними балками і траверсою, а також їх взаємозв'язку з іншими вузлами, забезпечити розширення експлуатаційних можливостей. Поставлена задача вирішена в конструкції універсального автоматичного захватного пристрою для контейнерів, що включає несучу раму з напра со CD CD О) 6476 вляючими для наведення на контейнер, захватні органи, які розміщені по кутах несучої рами і установлені поворотними навколо вертикальної осі, механізм повороту захватних органів, що містить порожній циліндр, установлений в центрі рами і розташований всередині порожнього циліндра привантажений шток з двома поздовжніми пазами, зміщеними на 90° один відносно другого і з'єднаними між собою гвинтовими пазами, підпружинений штифт, розташований на порожньому циліндрі і установлений в пазах привантаженого штока, шківи, які розміщені на захватних органах і з'єднувальний елемент тим, що пристрій додатково забезпечений двома поперечними коробчастими балками, установленими з можливістю вертикального пересування у двох шахтах, виконаних в корпусі несучої рами, а також траверсою, яка жорстко з'єднана з двома коробчастими балками і сполучена тягою з привантаженим штоком захватних органів. Додаткові дві поперечні коробчасті балки служать пазами для введення вилочних підхватів автонавантажувача, а траверсу надівають на гак вантажопідйомного крану. Універсальний автоматичний захватний пристрій для контейнерів зображений на кресленні, де: Фіг.1 - вигляд пристрою спереду ( при роботі з вантажопідйомним краном); Фіг.2 - вигляд пристрою зверху; Фіг.З - кінематична схема пристрою; Фіг.4 - вигляд збоку (при роботі з вилочним автонавантажувачем); Фіг.5 - переріз А-А на Фіг.1; Фіг.6 - вузол (1) на Фіг. 1; Фіг.7 - вид захватного органу; Фіг.8 - вид механізму повороту захватних органів; Фіг.9 - переріз Б-Б на Фіг.6; Фіг. 10 - переріз В-В на Фіг.9. Універсальний автоматичний захватний пристрій для контейнерів містить несучу раму 1, на якій установлені направляючі 3 для наведення на контейнер (окремою позицією не показано). По кутах несучої рами 1 установлені захватні органи 4, до складу яких входять осі 5, голівки 6, і шківи 7. В середній частині несучої рами 1 закріплений механізм 8 повороту захватних органів 4. Механізм 8 повороту включає порожній циліндр 9, який жорстко закріплений на несучій рамі 1. Всередині порожнього циліндра 9 розташований привантажений шток 10 з двома поздовжніми пазами 11 і 12, зміщеними на 90° один відносно другого і сполученими гвинтовими пазами 13 і 14 змінної глибини з карманами 15 і окремим поздовжнім пазом 16. Привантажений шток 10 зафіксований від обертання шпонкою 17, яка закріплена на корпусі несучої рами 1 і яка входить в окремий поздовжній паз 16. Ззовні порожнього циліндра 9 установлена з можливістю повороту гільза 18, у верхній частині якої закріплений стакан 19. В стакані 19 розміщений підпружинений штифт 20, робоча частина якого вставлена в повздовжній паз, наприклад 11. Привантажений шток 10 привантажено обважнюючим фланцем 21, закріпленим на верхньому торці привантаженого штока 10. Гільза 18 сполучена з захватними органами 4 за допомогою з'єд нувального елемента (окремою позицією на показано), який включає канат 22 і регулювальні талрепи 24. З'єднувальний елемент обгинає гільзу 18, шківи 7 захватних органів 4 і відхиляючі шківи 23. Канат 22 жорстко закріплений за допомогою планок 25 і 26 на шківах 7 і в гільзі 18. В поздовжній балці (окремою позицією не показано) несучої рами 1 виконані дві шахти 27, в які установлені з можливістю вертикального переміщення дві поперечні коробчасті балки 28. Порожнини поперечних коробчастих балок 28 призначені для введення в них вилочних підхватів автонавантажувача 33. До поперечних коробчастих балок 28 жорстко кріпиться траверса 29. Траверса 29 має вантажні рими ЗО до яких кріпляться вантажні стропи 31, які навішуються на вантажний гак крана (вантажний гак і кран на кресленні не показані). Траверса 29 сполучена з привантаженим штоком 10 тягою 32, наприклад ланцюжком. Несуча рама 1 складається з однієї поздовжньої 34 і двох поперечних коробчастих балок 35. Одна з поперечних коробчастих балок 35 установлена з можливістю коливання на горизонтальній осі 2. Пристрій працює таким чином. При підйомі універсального автоматичного захватного пристрою краном (за вантажні стропи 31) або вилочним автонавантажувачем (попередньо вилочні підхвати заводяться в порожнини коробчастих балок 28), поперечні коробчасті балки 28 знаходяться в крайньому верхньому положенні в шахтах 27. Траверса 29 також знаходиться у верхньому положенні та через гнучкий елемент (ланцюжок) 32 утримує в крайньому верхньому положенні привантажений шток 10 механізму 8 повороту захватних органів 4. При цьому, робоча частина підпружиненого штифта 20 знаходиться в одному з поздовжніх пазів 11 (або 12), а захватні органи 4 повернуті в неробочий (вихідний) стан. Універсальний автоматичний захватний пристрій краном або автонавантажувачем наводиться, за допомогою направляючих 3, на контейнер, при цьому несуча рама 1, завдяки можливості коливання однієї з поперечних коробчастих балок 35 на осі 2 несучої рами 1, копірує верхню поверхню контейнера, створюючи стабільність входу голівок 6 захватних органів 4 в кутові фітинги контейнера. При опусканні гака крана або вилочних підхватів автонавантажувача опускаються поперечні коробчасті балки 28 в шахтах 27, а також траверса 29. Під дією власної ваги і ваги обважнюючогр фланцю 21 опускається привантажений шток 10, робоча частина підпружиненого штифта 20 переходить у гвинтовий паз 13, а далі - в другий поздовжній паз 12. При цьому, відбувається поворот на 90° гільзи 18 і пов'язаних з нею за допомогою каната 22 захватних органів 4 в робоче положення («закрито»). Відбувається з'єднання універсального автоматичного захватного пристрою з контейнером. При наступному підйомі гака крана або вилочних підхватів автонавантажувача піднімаються в крайнє верхнє положення поперечні коробчасті балки 28 в шахтах 27 несучої рами 1 разом з траверсою 29, яка за допомогою гнучкого елемента (ланцюжка) 32 піднімає привантажений шток 10 з обважнюючим фланцем 21. При цьому, робоча частина підпружиненого штифта 20 рухається 6476 вхолосту по поздовжньому пазу 12 в нижню частину привантаженого штока 10 - відбувається взведення автомата Універсальний автоматичний захватний пристрій разом з контейнером переноситься краном або автонавантажувачем до місця установки (розвантаження) Після установки контейнера на опірну поверхню гак крана або вилочні підхвати автонавантажувача опускаються до опускання поперечних коробчастих балок 28 разом з траверсою 29 в крайнє нижнє положення в шахтах 27 несучої рами 1 Під ДІЄЮ власної ваги і ваги обважнюючого фланцю 21 опускається привантажений шток 10 Робоча частина підпруженого штифта 20 переходить у гвинтовий паз 14, а далі в другий поздовжній паз 11 При цьому, відбувається поворот на 90° гільзи 18 і пов язаних з нею за допомогою каната 22 захватних органів 4 у вихідне неробоче положення («відкрито») Відбувається роз'єднання універсального автоматичного захватнго пристрою з контейнером При подальшому ПІДЙОМІ крана або вилочних підхватів автонавантажувача поперечні коробчасті балки 28, траверса 29, привантажений шток 10 з обважнюючим фланцем 21 піднімаються у вихідне положення При цьому, робоча частина підпружиненого штифта 20 рухається вхолосту по поздовжньому пазу 11 в нижню частину привантаженого штока 10 - відбувається взведення автомата Універсальний автоматичний захватний пристрій знімається з контейнера і готовий до подальшого цикла роботи Таким чином, заявлений універсальний автоматичний захватний пристрій дозволяє перевантажувати контейнери міжнародного стандарту, в т ч 1А, 1АА (довжина 40 футів) не тільки вантажопідйомним краном але й універсальними вилочними автонавантажувачами без додаткового підключення гідро - або електропривода Фіг 2 22 2
ДивитисяДодаткова інформація
Назва патенту англійськоюUniversal automatic gripping device for containers
Автори англійськоюIvanov Oleh Mykolaiovych
Назва патенту російськоюУниверсальное автоматическое захватное приспособление для контейнеров
Автори російськоюИванов Олег Николаевич
МПК / Мітки
МПК: B66C 1/62
Мітки: універсальний, контейнерів, пристрій, захватний, автоматичний
Код посилання
<a href="https://ua.patents.su/4-6476-universalnijj-avtomatichnijj-zakhvatnijj-pristrijj-dlya-kontejjneriv.html" target="_blank" rel="follow" title="База патентів України">Універсальний автоматичний захватний пристрій для контейнерів</a>
Захватний пристрій для контейнерів

Номер патенту: 33916
Опубліковано: 16.06.2003
Автори: Іванов Олег Миколайович, Іванов Микола Степанович
МПК: B66C 1/62
Мітки: захватний, пристрій, контейнерів
Формула / Реферат:
Захватний пристрій для контейнерів, який містить раму, розташовані по кутах рами поворотні навколо вертикальної осі захватні органи, привід повороту захватних органів, що включає установлений в центрі рами порожній циліндр, розташований всередині циліндра шток з привантаженням, виконаний на зовнішній поверхні з розташованими під кутом 90° один до одного подовжніми пазами, з'єднаними між собою гвинтовими пазами, розміщений на циліндрі та...
Пенетраційний захватний пристрій

Номер патенту: 59648
Опубліковано: 15.09.2003
Автори: Драпак Георгій Мефодійович, Романець Тарас Петрович, Онофрійчук Володимир Іванович, Керебко Тарас Станіславович
МПК: B65H 3/22
Мітки: пристрій, пенетраційний, захватний
Формула / Реферат:
1. Пенетраційний захватний пристрій, що містить встановлений у корпусі поворотний елемент з прикріпленою до нього вигнутою голкою, встановленою з можливістю виходу крізь прорізь у корпусі, та привід поворотного елемента, що складається з штовхача та шатуна, який відрізняється тим, що шатун та поворотний елемент встановлені з можливістю фіксації пристрою у позиції захвату за рахунок "мертвого" положення механізму.2. Пристрій...
Захватний пристрій

Номер патенту: 35952
Опубліковано: 16.04.2001
Автори: Сімута Роман Русланович, Давигора Вадим Миколайович, Пасічник Віталій Анатолійович
МПК: B25J 15/00
Формула / Реферат:
1. Захватний пристрій, що містить корпус, виконаний з можливістю кріплення до складального інструмента, захватно-базуючий механізм, механізм подачі деталей, що складаються, і інструмент для загвинчування деталей, який відрізняється тим, що в корпусі виконано отвір з багатозахідною нарізкою, a захватно-базуючий механізм виконаний із гвинтових дротиків, розміщених в канавках багатозахідної нарізки з можливістю обмеженого переміщення в площині,...
Захватний пристрій

Номер патенту: 72799
Опубліковано: 15.04.2005
Автори: Клаппер Манфред, Гліха Віктор
МПК: B25J 1/00, G21C 19/00, G21C 19/02, G21C 7/00
Формула / Реферат:
1. Захватний пристрій (1) для маніпулювання розміщеними в обробному приміщенні (2) компонентами із операторського приміщення (4), відокремленого від обробного приміщення (2) перегородкою (6), який містить пропущений крізь перегородку (6) порожнистий вал (8), на розміщеному в обробному приміщенні (2) кінці (12) якого встановлений керований тягою (16) захват (14), причому тяга (16) пропущена всередині порожнистого вала (8) і зв'язана з органом...
Пристрій для розвантажування контейнерів в кузов сміттєвоза
Номер патенту: 39285
Опубліковано: 15.06.2001
Автори: Стельмашенко Анатолій Іванович, Подольський Юхим Аврамович, Павлик Михайло Федорович, Петраков Іван Володимирович
МПК: B65F 3/02
Мітки: пристрій, кузов, розвантажування, контейнерів, сміттєвоза
Формула / Реферат:
Пристрій для розвантажування контейнерів в кузов сміттєвоза, який містить в собі маніпулятор у вигляді шарнірно зчленованої з рамою сміттєвоза стріли і шарнірно закріплений на неї з можливістю поворота у вертикальній площині захват для контейнерів, кришку для закривання контейнера, кришку для закривання завантажувального отвору в кузові сміттєвоза, і гідроциліндри для управління відповідно стрілою, захватом і кришкою, який відрізняється тим,...
Попередній патент: Фотодіод
Наступний патент: Спосіб кування сталевих заготівок типу валів
Випадковий патент: Спосіб одержання лікувального засобу при захворюваннях, що супроводжуються порушенням функцій центральної нервової системи