Спосіб виявлення динамічного кутового розцентрування роторного агрегату
Номер патенту: 74612
Опубліковано: 12.11.2012
Автори: Бондар Олена Валеріївна, Кіяновський Микола Володимирович


Формула / Реферат
Спосіб виявлення динамічного кутового розцентрування роторного агрегату від дії прихованих дефектів віддалених опор багатоопорної стаціонарної роторної машини, що полягає у безперервній реєстрації амплітуд коливання осі ротора на опорі ротора біля точки центрування у діапазоні інформативних частот, у площині, перпендикулярній до осі валопроводу, реєстрації годографа прецесії осі ротора, який відрізняється тим, що встановлюють кутове зміщення площини годографа прецесії осі ротора від площини, перпендикулярної до осі валопроводу.
Текст
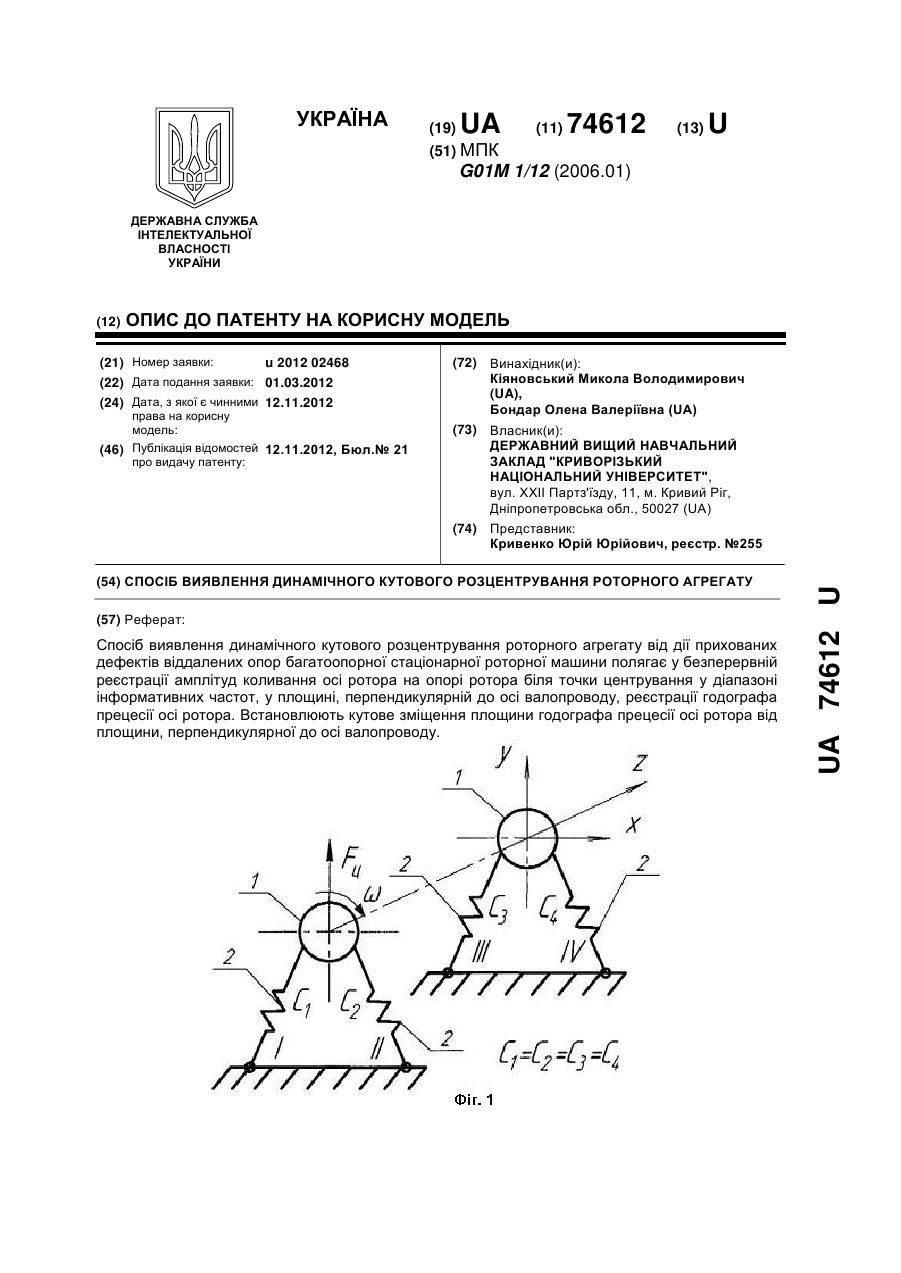
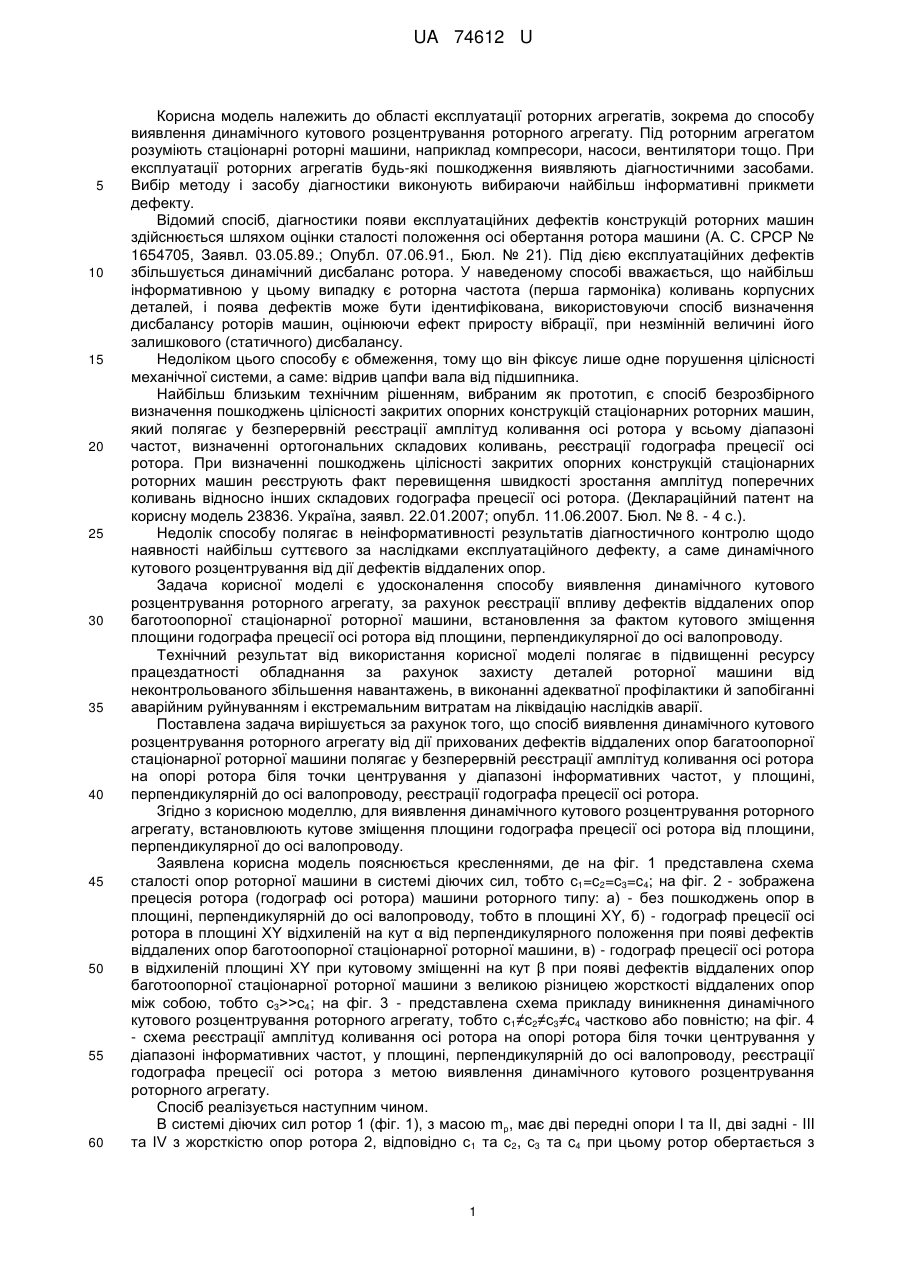
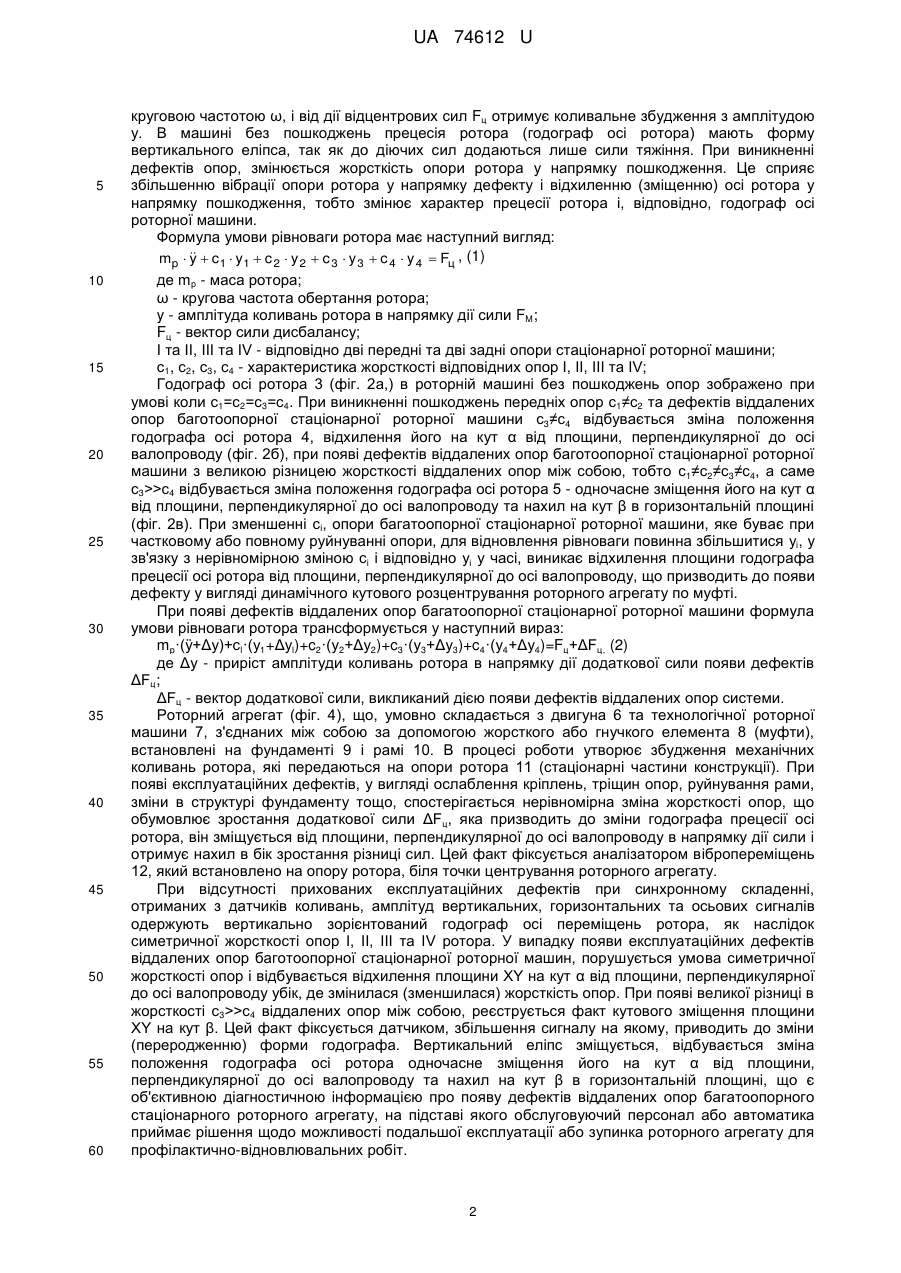
Реферат: Спосіб виявлення динамічного кутового розцентрування роторного агрегату від дії прихованих дефектів віддалених опор багатоопорної стаціонарної роторної машини полягає у безперервній реєстрації амплітуд коливання осі ротора на опорі ротора біля точки центрування у діапазоні інформативних частот, у площині, перпендикулярній до осі валопроводу, реєстрації годографа прецесії осі ротора. Встановлюють кутове зміщення площини годографа прецесії осі ротора від площини, перпендикулярної до осі валопроводу. UA 74612 U (12) UA 74612 U UA 74612 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області експлуатації роторних агрегатів, зокрема до способу виявлення динамічного кутового розцентрування роторного агрегату. Під роторним агрегатом розуміють стаціонарні роторні машини, наприклад компресори, насоси, вентилятори тощо. При експлуатації роторних агрегатів будь-які пошкодження виявляють діагностичними засобами. Вибір методу і засобу діагностики виконують вибираючи найбільш інформативні прикмети дефекту. Відомий спосіб, діагностики появи експлуатаційних дефектів конструкцій роторних машин здійснюється шляхом оцінки сталості положення осі обертання ротора машини (А. С. СРСР № 1654705, Заявл. 03.05.89.; Опубл. 07.06.91., Бюл. № 21). Під дією експлуатаційних дефектів збільшується динамічний дисбаланс ротора. У наведеному способі вважається, що найбільш інформативною у цьому випадку є роторна частота (перша гармоніка) коливань корпусних деталей, і поява дефектів може бути ідентифікована, використовуючи спосіб визначення дисбалансу роторів машин, оцінюючи ефект приросту вібрації, при незмінній величині його залишкового (статичного) дисбалансу. Недоліком цього способу є обмеження, тому що він фіксує лише одне порушення цілісності механічної системи, а саме: відрив цапфи вала від підшипника. Найбільш близьким технічним рішенням, вибраним як прототип, є спосіб безрозбірного визначення пошкоджень цілісності закритих опорних конструкцій стаціонарних роторних машин, який полягає у безперервній реєстрації амплітуд коливання осі ротора у всьому діапазоні частот, визначенні ортогональних складових коливань, реєстрації годографа прецесії осі ротора. При визначенні пошкоджень цілісності закритих опорних конструкцій стаціонарних роторних машин реєструють факт перевищення швидкості зростання амплітуд поперечних коливань відносно інших складових годографа прецесії осі ротора. (Деклараційний патент на корисну модель 23836. Україна, заявл. 22.01.2007; опубл. 11.06.2007. Бюл. № 8. - 4 с.). Недолік способу полягає в неінформативності результатів діагностичного контролю щодо наявності найбільш суттєвого за наслідками експлуатаційного дефекту, а саме динамічного кутового розцентрування від дії дефектів віддалених опор. Задача корисної моделі є удосконалення способу виявлення динамічного кутового розцентрування роторного агрегату, за рахунок реєстрації впливу дефектів віддалених опор баготоопорної стаціонарної роторної машини, встановлення за фактом кутового зміщення площини годографа прецесії осі ротора від площини, перпендикулярної до осі валопроводу. Технічний результат від використання корисної моделі полягає в підвищенні ресурсу працездатності обладнання за рахунок захисту деталей роторної машини від неконтрольованого збільшення навантажень, в виконанні адекватної профілактики й запобіганні аварійним руйнуванням і екстремальним витратам на ліквідацію наслідків аварії. Поставлена задача вирішується за рахунок того, що спосіб виявлення динамічного кутового розцентрування роторного агрегату від дії прихованих дефектів віддалених опор багатоопорної стаціонарної роторної машини полягає у безперервній реєстрації амплітуд коливання осі ротора на опорі ротора біля точки центрування у діапазоні інформативних частот, у площині, перпендикулярній до осі валопроводу, реєстрації годографа прецесії осі ротора. Згідно з корисною моделлю, для виявлення динамічного кутового розцентрування роторного агрегату, встановлюють кутове зміщення площини годографа прецесії осі ротора від площини, перпендикулярної до осі валопроводу. Заявлена корисна модель пояснюється кресленнями, де на фіг. 1 представлена схема сталості опор роторної машини в системі діючих сил, тобто с1=c2=с3=c4; на фіг. 2 - зображена прецесія ротора (годограф осі ротора) машини роторного типу: а) - без пошкоджень опор в площині, перпендикулярній до осі валопроводу, тобто в площині XY, б) - годограф прецесії осі ротора в площині XY відхиленій на кут α від перпендикулярного положення при появі дефектів віддалених опор баготоопорної стаціонарної роторної машини, в) - годограф прецесії осі ротора в відхиленій площині XY при кутовому зміщенні на кут β при появі дефектів віддалених опор баготоопорної стаціонарної роторної машини з великою різницею жорсткості віддалених опор між собою, тобто с3>>с4; на фіг. 3 - представлена схема прикладу виникнення динамічного кутового розцентрування роторного агрегату, тобто с1≠с2≠с3≠с4 частково або повністю; на фіг. 4 - схема реєстрації амплітуд коливання осі ротора на опорі ротора біля точки центрування у діапазоні інформативних частот, у площині, перпендикулярній до осі валопроводу, реєстрації годографа прецесії осі ротора з метою виявлення динамічного кутового розцентрування роторного агрегату. Спосіб реалізується наступним чином. В системі діючих сил ротор 1 (фіг. 1), з масою mр, має дві передні опори І та II, дві задні - III та IV з жорсткістю опор ротора 2, відповідно c1 та c2, с3 та c4 при цьому ротор обертається з 1 UA 74612 U 5 10 15 20 25 30 35 40 45 50 55 60 круговою частотою ω, і від дії відцентрових сил Fц отримує коливальне збудження з амплітудою у. В машині без пошкоджень прецесія ротора (годограф осі ротора) мають форму вертикального еліпса, так як до діючих сил додаються лише сили тяжіння. При виникненні дефектів опор, змінюється жорсткість опори ротора у напрямку пошкодження. Це сприяє збільшенню вібрації опори ротора у напрямку дефекту і відхиленню (зміщенню) осі ротора у напрямку пошкодження, тобто змінює характер прецесії ротора і, відповідно, годограф осі роторної машини. Формула умови рівноваги ротора має наступний вигляд: mp c1 y1 c 2 y 2 c 3 y 3 c 4 y 4 Fц , (1) y де mр - маса ротора; ω - кругова частота обертання ротора; y - амплітуда коливань ротора в напрямку дії сили FM; Fц - вектор сили дисбалансу; І та II, III та IV - відповідно дві передні та дві задні опори стаціонарної роторної машини; с1, с2, с3, с4 - характеристика жорсткості відповідних опор І, II, III та IV; Годограф осі ротора 3 (фіг. 2а,) в роторній машині без пошкоджень опор зображено при умові коли с1=с2=с3=с4. При виникненні пошкоджень передніх опор с1≠с2 та дефектів віддалених опор баготоопорної стаціонарної роторної машини с3≠с4 відбувається зміна положення годографа осі ротора 4, відхилення його на кут α від площини, перпендикулярної до осі валопроводу (фіг. 2б), при появі дефектів віддалених опор баготоопорної стаціонарної роторної машини з великою різницею жорсткості віддалених опор між собою, тобто с1≠с2≠с3≠с4, а саме с3>>с4 відбувається зміна положення годографа осі ротора 5 - одночасне зміщення його на кут α від площини, перпендикулярної до осі валопроводу та нахил на кут β в горизонтальній площині (фіг. 2в). При зменшенні сі, опори багатоопорної стаціонарної роторної машини, яке буває при частковому або повному руйнуванні опори, для відновлення рівноваги повинна збільшитися уі, у зв'язку з нерівномірною зміною сі і відповідно уі у часі, виникає відхилення площини годографа прецесії осі ротора від площини, перпендикулярної до осі валопроводу, що призводить до появи дефекту у вигляді динамічного кутового розцентрування роторного агрегату по муфті. При появі дефектів віддалених опор багатоопорної стаціонарної роторної машини формула умови рівноваги ротора трансформується у наступний вираз: mp·(ÿ+Δy)+cl·(y1+Δyl)+c2·(y2+Δy2)+c3·(y3+Δy3)+c4·(y4+Δy4)=Fц+ΔFц, (2) де Δy - приріст амплітуди коливань ротора в напрямку дії додаткової сили появи дефектів ΔFц; ΔFц - вектор додаткової сили, викликаний дією появи дефектів віддалених опор системи. Роторний агрегат (фіг. 4), що, умовно складається з двигуна 6 та технологічної роторної машини 7, з'єднаних між собою за допомогою жорсткого або гнучкого елемента 8 (муфти), встановлені на фундаменті 9 і рамі 10. В процесі роботи утворює збудження механічних коливань ротора, які передаються на опори ротора 11 (стаціонарні частини конструкції). При появі експлуатаційних дефектів, у вигляді ослаблення кріплень, тріщин опор, руйнування рами, зміни в структурі фундаменту тощо, спостерігається нерівномірна зміна жорсткості опор, що обумовлює зростання додаткової сили ΔFц, яка призводить до зміни годографа прецесії осі ротора, він зміщується від площини, перпендикулярної до осі валопроводу в напрямку дії сили і отримує нахил в бік зростання різниці сил. Цей факт фіксується аналізатором вібропереміщень 12, який встановлено на опору ротора, біля точки центрування роторного агрегату. При відсутності прихованих експлуатаційних дефектів при синхронному складенні, отриманих з датчиків коливань, амплітуд вертикальних, горизонтальних та осьових сигналів одержують вертикально зорієнтований годограф осі переміщень ротора, як наслідок симетричної жорсткості опор І, II, III та IV ротора. У випадку появи експлуатаційних дефектів віддалених опор баготоопорної стаціонарної роторної машин, порушується умова симетричної жорсткості опор і відбувається відхилення площини XY на кут α від площини, перпендикулярної до осі валопроводу убік, де змінилася (зменшилася) жорсткість опор. При появі великої різниці в жорсткості с3>>с4 віддалених опор між собою, реєструється факт кутового зміщення площини XY на кут β. Цей факт фіксується датчиком, збільшення сигналу на якому, приводить до зміни (переродженню) форми годографа. Вертикальний еліпс зміщується, відбувається зміна положення годографа осі ротора одночасне зміщення його на кут α від площини, перпендикулярної до осі валопроводу та нахил на кут β в горизонтальній площині, що є об'єктивною діагностичною інформацією про появу дефектів віддалених опор багатоопорного стаціонарного роторного агрегату, на підставі якого обслуговуючий персонал або автоматика приймає рішення щодо можливості подальшої експлуатації або зупинка роторного агрегату для профілактично-відновлювальних робіт. 2 UA 74612 U 5 10 15 Застосування корисної моделі на спосіб виявлення динамічного кутового розцентрування роторного агрегату, що заявляється, дозволяє підвищити ресурс працездатності обладнання за рахунок захисту деталей роторної машини від неконтрольованого збільшення навантажень, і як наслідок збільшення його продуктивності, при забезпеченні оперативного фіксування факту появи дефекту віддалених опор багатоопорної стаціонарної роторної машини шляхом реєстрації факту кутового зміщення площини годографа прецесії осі ротора від площини, перпендикулярної до осі валопроводу й, тим самим, виконувати адекватну профілактику й запобігти аварійним руйнуванням і екстремальним витратам на ліквідацію наслідків аварії. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб виявлення динамічного кутового розцентрування роторного агрегату від дії прихованих дефектів віддалених опор багатоопорної стаціонарної роторної машини, що полягає у безперервній реєстрації амплітуд коливання осі ротора на опорі ротора біля точки центрування у діапазоні інформативних частот, у площині, перпендикулярній до осі валопроводу, реєстрації годографа прецесії осі ротора, який відрізняється тим, що встановлюють кутове зміщення площини годографа прецесії осі ротора від площини, перпендикулярної до осі валопроводу. 3 UA 74612 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for detection of dynamic angular misalignment of a rotor unit
Автори англійськоюKianovskyi Mykola Volodymyrovych, Bondar Olena Valeriivna
Назва патенту російськоюСпособ выявления динамической угловой расцентровки роторного агрегата
Автори російськоюКияновский Николай Владимирович, Бондарь Елена Валериевна
МПК / Мітки
МПК: G01M 1/12
Мітки: динамічного, розцентрування, агрегату, кутового, виявлення, роторного, спосіб
Код посилання
<a href="https://ua.patents.su/6-74612-sposib-viyavlennya-dinamichnogo-kutovogo-rozcentruvannya-rotornogo-agregatu.html" target="_blank" rel="follow" title="База патентів України">Спосіб виявлення динамічного кутового розцентрування роторного агрегату</a>
Спосіб безрозбірного визначення руйнувань закритих конструкцій опор стаціонарних роторних машин
Номер патенту: 23836
Опубліковано: 11.06.2007
Автори: Кіяновський Микола Володимирович, Бондар Олена Валеріївна
МПК: G01M 1/12
Мітки: закритих, роторних, визначення, машин, спосіб, опор, конструкцій, руйнувань, безрозбірного, стаціонарних
Формула / Реферат:
Спосіб безрозбірного визначення пошкоджень цілісності закритих опорних конструкцій стаціонарних роторних машин, що полягає у безперервній реєстрації амплітуд коливання осі ротора у всьому діапазоні частот, визначенні ортогональних складових коливань, реєстрації годографа прецесії осі ротора, який відрізняється тим, що при визначенні пошкоджень цілісності закритих опорних конструкцій стаціонарних роторних машин реєструють факт перевищення...
Клапанна пластина роторного гідравлічного агрегату
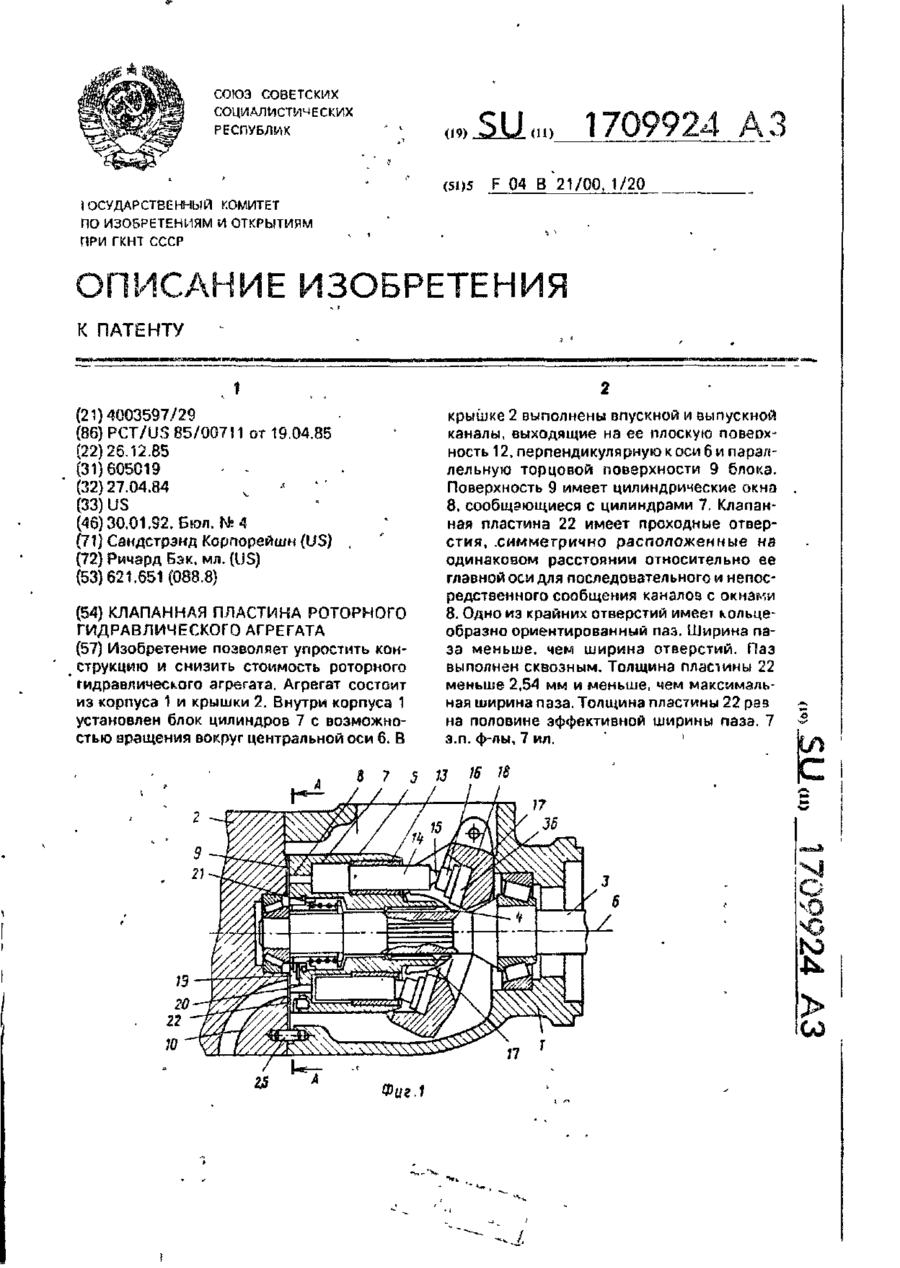
Номер патенту: 4228
Опубліковано: 27.12.1994
Автори: Річард Бек, Мл.
МПК: F04B 1/20, F04B 53/10, F01B 3/00
Мітки: клапанна, роторного, агрегату, пластина, гідравлічного
Формула / Реферат:
1. Клапанная пластина роторного гидравлического агрегата, состоящего из корпуса, внутри которого установлен блок цилиндров с возможностью вращения вокруг центральной оси, и торцовой крышки с впускным и выпускным каналами, выходящими на плоскую поверхность, перпендикулярную к центральной оси и параллельную торцовой поверхности блока цилиндров, имеющей цилиндрические окна, сообщающиеся с цилиндрами блока, при этом клапанная пластина...
Спосіб забезпечення прямолінійності осі обертання багатоопорного обертового агрегату
Номер патенту: 62253
Опубліковано: 25.08.2011
Автори: Кузьо Ігор Володимирович, Дзюбик Людмила Володимирівна
МПК: F27B 7/22
Мітки: обертового, обертання, спосіб, забезпечення, прямолінійності, осі, агрегату, багатоопорного
Формула / Реферат:
Спосіб забезпечення прямолінійності осі обертання багатоопорного обертового агрегату, що передбачає регулювальні переміщення опор у вертикальній площині, який відрізняється тим, що опори обертового агрегату вибирають як пружні елементи, визначають навантаження, яке діє на них, визначають пружні деформації опор, а регулювальні переміщення у вертикальній площині здійснюють із врахуванням визначених пружних деформацій опор до забезпечення...
Процес регулювання конфігурації роторного насоса, корпус для роторного насоса, роторний насос та кільцева перемичка для корпуса роторного насоса (варіанти)
Номер патенту: 90840
Опубліковано: 10.06.2010
Автор: Гелденгуіс Зігфрід
МПК: F04B 23/00
Мітки: корпуса, роторний, процес, роторного, кільцева, корпус, перемичка, регулювання, насос, варіанти, конфігурації, насоса
Формула / Реферат:
1. Процес регулювання конфігурації роторного насоса, який передбачає регулювання осьового положення кінцевої частини корпуса на всмоктувальному кінці насоса відносно решти корпуса або головної її частини і відносно вхідного фланця насоса, причому цей процес передбачає переміщування кінцевої частини корпуса відносно решти корпуса уздовж межі поділу периферійного ущільнення і відносно вхідного фланця в місці розриву у впускному трубопроводі...
Робочий орган роторного екскаватора
Номер патенту: 4486
Опубліковано: 27.12.1994
Автори: Бугайов Семен Петрович, Бугайов Сергій Семенович
МПК: E02F 3/18
Мітки: роторного, робочий, орган, екскаватора
Формула / Реферат:
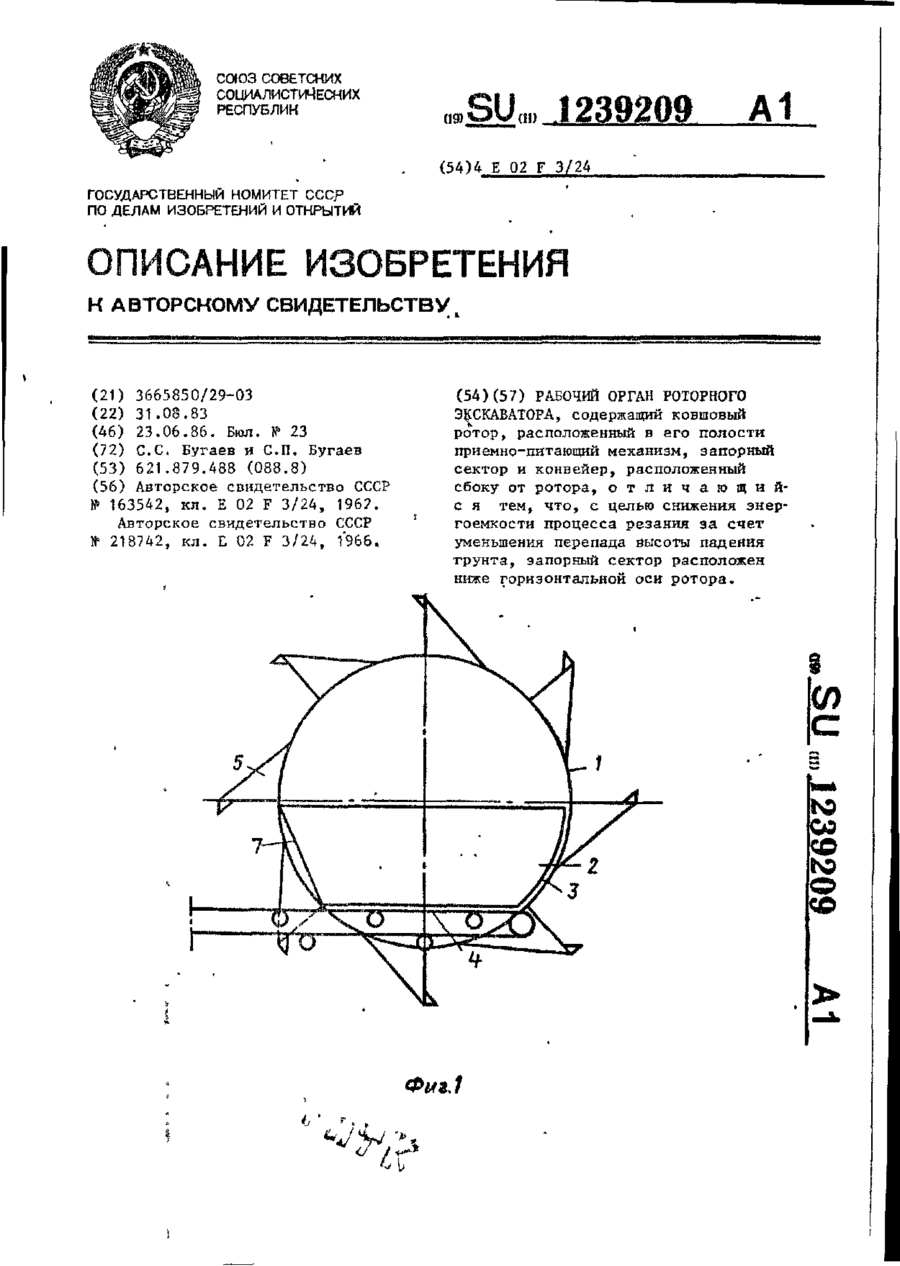
Рабочий орган роторного экскаватора, содержащий ковшовый ротор, расположенный в его полости приемно-питающий механизм, запорный сектор и конвейер, расположенный сбоку от ротора, отличающийся тем, что, с целью снижения энергоемкости процесса резания за счет уменьшения перепада высоты падения грунта, запорный сектор расположен ниже горизонтальной оси ротора.
Попередній патент: Пристрій для виготовлення кисломолочного сиру
Наступний патент: Спосіб ультразвукового електромагнітно-акустичного контролю поверхні металічних виробів з прямолінійними ділянками кромок
Випадковий патент: Пристрій для захисту електродвигуна від перевантаження