Спосіб визначення висоти випромінюючого об’єкта над провідною поверхнею за допомогою приймача випромінювань, що рухається на навколоземній орбіті
Номер патенту: 75952
Опубліковано: 25.12.2012
Автори: Коняхін Григорій Фатеєвич, Макаров Лев Борисович, Малєєв Ігор Юрійович

Формула / Реферат
Спосіб визначення висоти випромінюючого об'єкта над провідною поверхнею за допомогою приймача випромінювань, що рухається на навколоземній орбіті, що включає прийом сигналів, вимір довжини хвилі сигналів і амплітуди сигналів, який відрізняється тим, що в ньому додатково вимірюють період інтерференційних флуктуацій амплітуди прийнятих сигналів, після чого визначають висоту джерела випромінювання по наступній формулі:
де λ - обмірювана довжина хвилі випромінюваного сигналу;
Τ - обмірюваний період інтерференційних флуктуацій сигналу;
![]() - обмірюваний кут візування положення джерела випромінювань щодо вертикалі;
- обмірюваний кут візування положення джерела випромінювань щодо вертикалі;
К = H/V cos2,
де
Η - висота польоту носія приймача випромінювань над провідною поверхнею;
V - швидкість польоту приймача випромінювань.
Текст
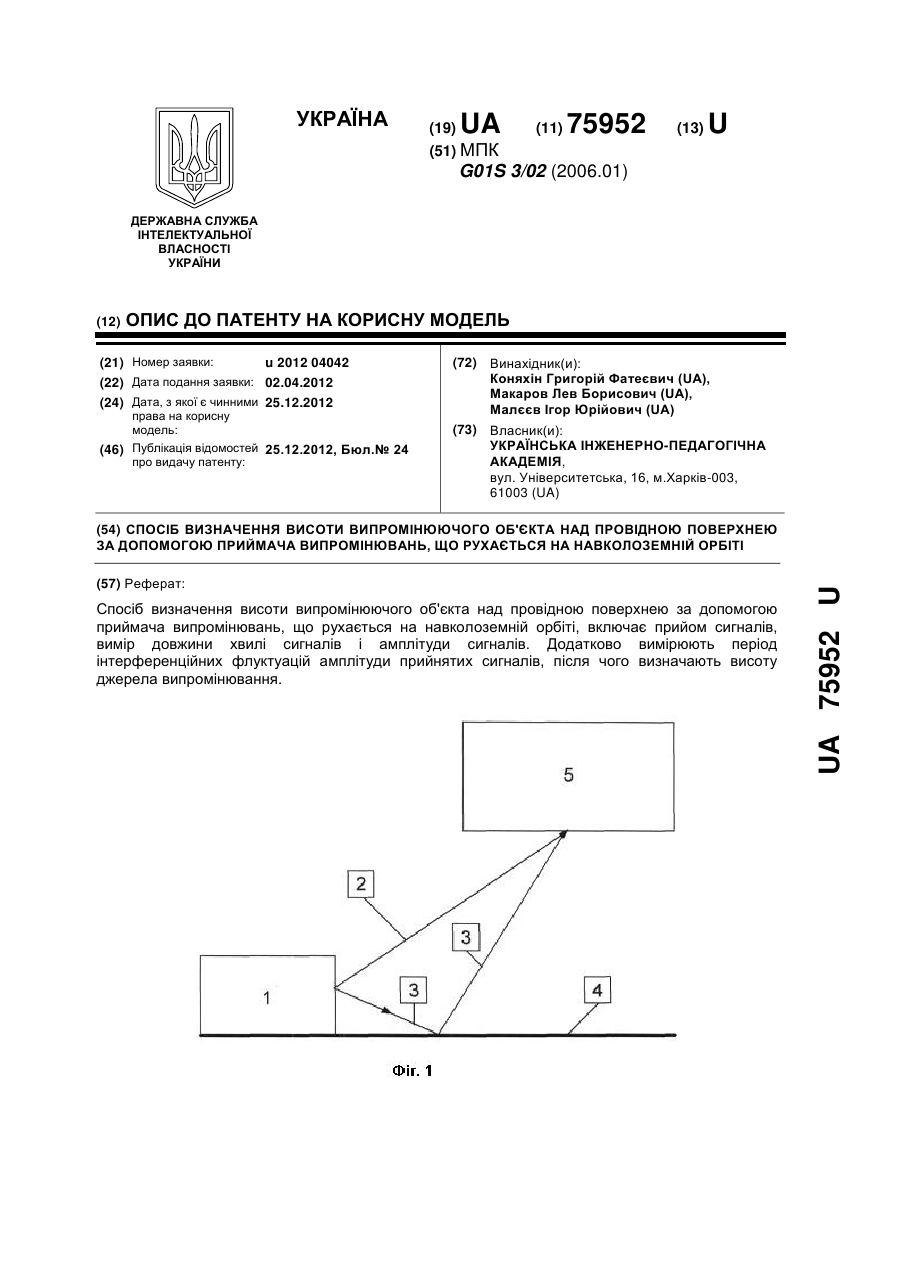
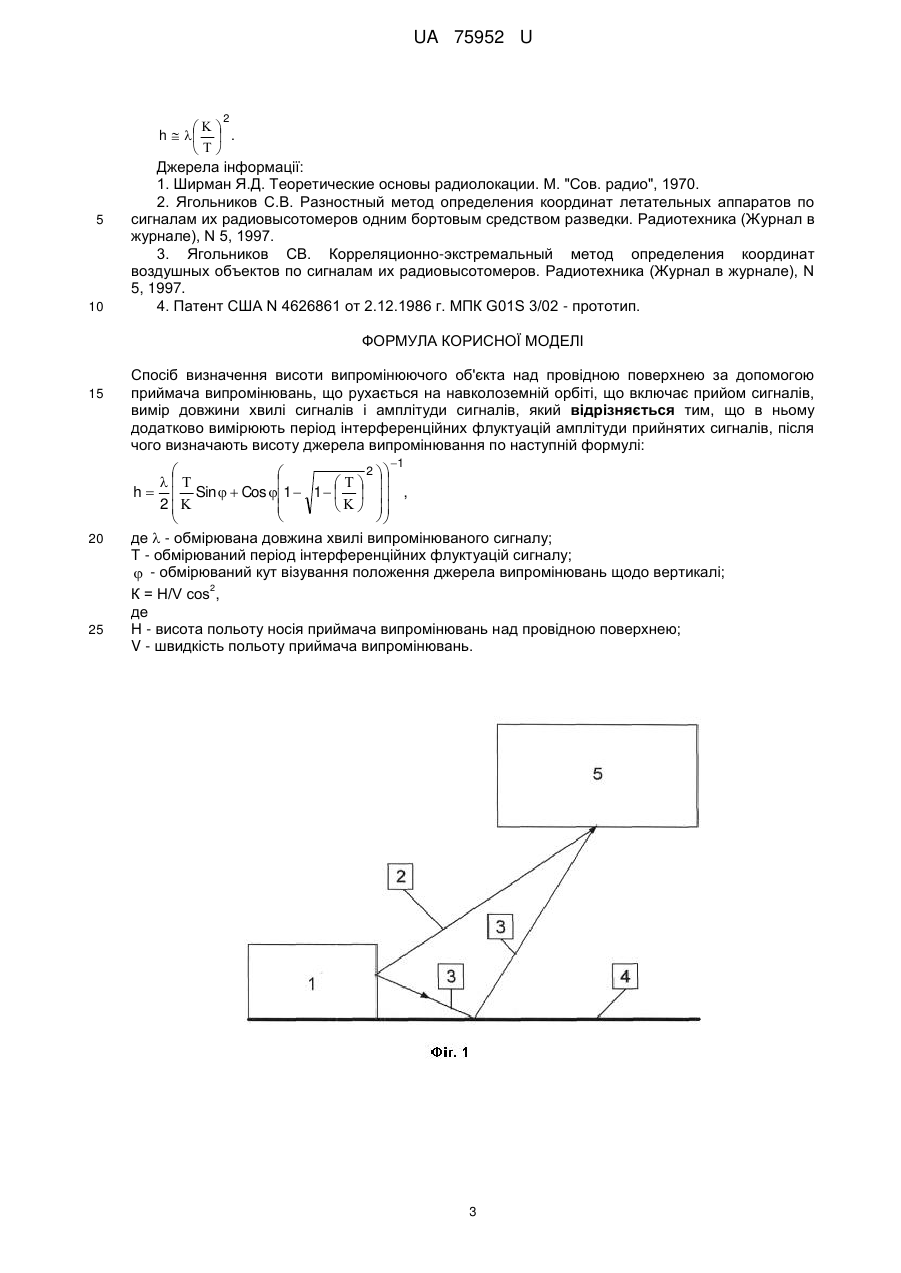
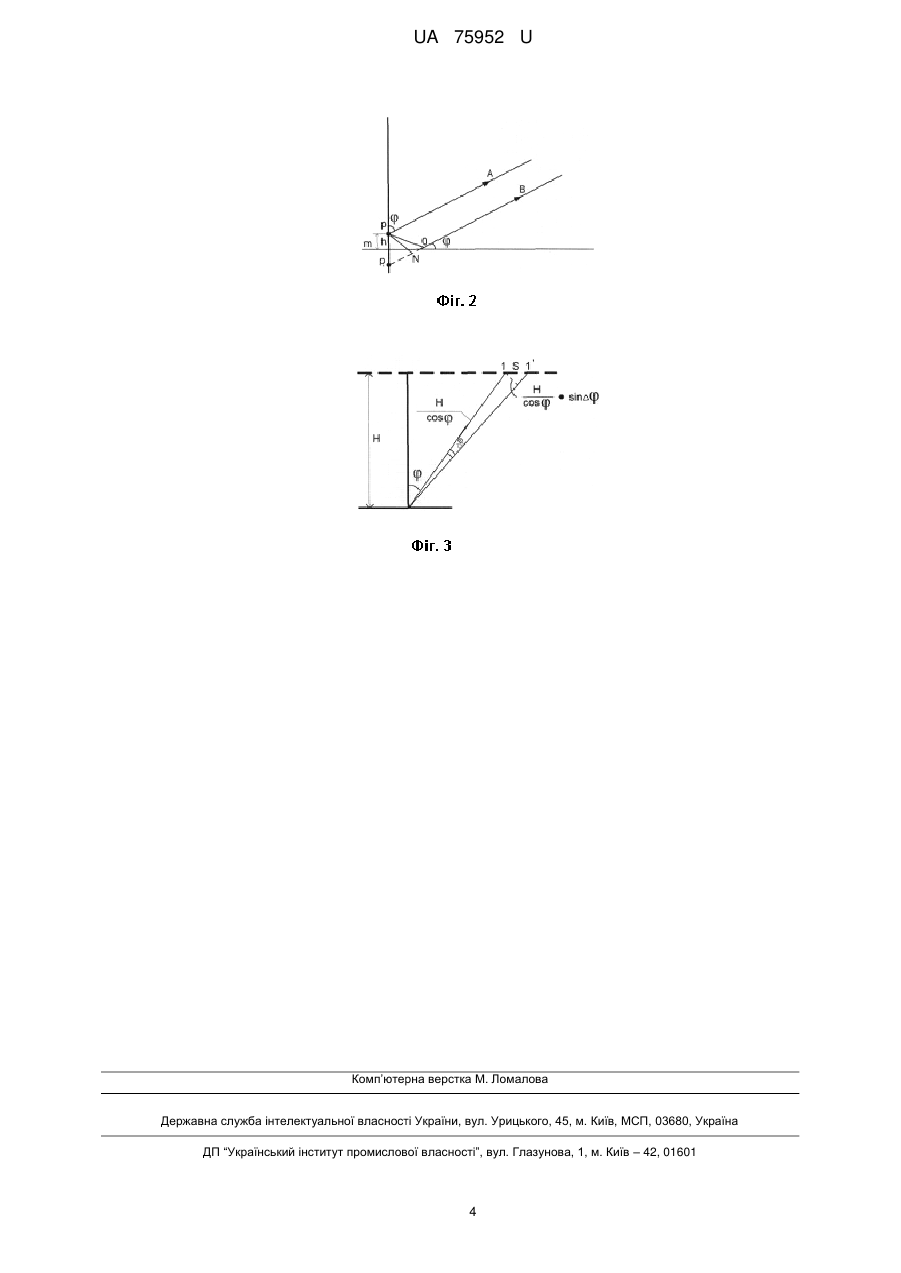
Реферат: Спосіб визначення висоти випромінюючого об'єкта над провідною поверхнею за допомогою приймача випромінювань, що рухається на навколоземній орбіті, включає прийом сигналів, вимір довжини хвилі сигналів і амплітуди сигналів. Додатково вимірюють період інтерференційних флуктуацій амплітуди прийнятих сигналів, після чого визначають висоту джерела випромінювання. UA 75952 U (54) СПОСІБ ВИЗНАЧЕННЯ ВИСОТИ ВИПРОМІНЮЮЧОГО ОБ'ЄКТА НАД ПРОВІДНОЮ ПОВЕРХНЕЮ ЗА ДОПОМОГОЮ ПРИЙМАЧА ВИПРОМІНЮВАНЬ, ЩО РУХАЄТЬСЯ НА НАВКОЛОЗЕМНІЙ ОРБІТІ UA 75952 U UA 75952 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до радіотехніки й може бути використана для визначення висоти об'єктів з випромінювачами електромагнітних хвиль над провідною поверхнею, а також для їхньої просторової селекції. Відомі пасивні способи визначення координат, засновані на прийомі випромінювань об'єктів у декількох (не менш трьох) крапках простору [1]. Недоліком цих способів є необхідність наявності декількох бортових засобів розвідки й ліній передачі інформації на пункті обробки. Це спричиняє складність практичної реалізації, високу вартість, низьку скритність, завадостійкість і живучість систем, що реалізують зазначені способи. Відомий спосіб визначення координат об'єкта шляхом прийому прямого й відбитих від поверхні, що підсилює, сигнали радіовисотомірів (РВ), виділення дзеркально відбитого сигналу й сигналу, дифузно відбитого ділянкою поверхні, що перебуває в головному пелюстку ДНА РВ [2]. Недоліком даного способу є те, що при його використанні для розвідки об'єктів над шорсткуватим (наприклад, ліс, бархани), пересіченим рельєфом місцевості (наприклад, горбкувата, низина) рівень дзеркально відбитого сигналу знижується, що приводить до різкого зменшення дальності розвідки й точності виміру координат. Особливо даний ефект проявляється при веденні розвідки з висотних літальних апаратів [3]. Аналогічний ефект також проявляється при розвідці сигналів РВ, що працюють у мм-діапазоні, навіть при польоті об'єктів над порівняно гладкими поверхнями (наприклад, луг, рілля). Найбільш близьким по технічній суті й призначенню способу, що заявляється, є спосіб визначення місця розташування джерела сигналів [4]. Суть цього способу полягає в наступному. Сигнали, випромінювані радіолокатором, що розвідує об'єкт, приймаються в декількох крапках, рознесених у просторі, виміряється їхня відносна затримка при поширенні до кожної із крапок прийому, амплітуди сигналів Отримані тимчасові затримки рівняються з попередньо обчисленими, у результаті чого визначають місце розташування об'єкта, що розвідують. Недоліками способу, взятому як прототип, є: 1. Низька точність визначення площинних координат внаслідок обмежень припустимих розмірів антен на випромінюючих об'єктах, що визначають точність виміру азимута. 2. Точність визначення площинних координат зі збільшенням дальності до випромінюючого об'єкта різко знижується. 3. Більша складність практичної реалізації при розвідці об'єктів, що перебувають на малих висотах над провідною поверхнею. В основу корисної моделі поставлена задача вдосконалити спосіб визначення висоти випромінюючого об'єкта над провідною поверхнею за допомогою приймача випромінювань, що рухається на навколоземній орбіті, шляхом виміру інтерференційних флуктуацій амплітуди прийнятих сигналів, що дозволяє підвищити точність визначення просторового положення джерела випромінювання, спростити практичну реалізацію при розвідці об'єктів, що перебувають на малих висотах над провідною поверхнею. Поставлена задача вирішується тим, що в способі визначення висоти випромінюючого об'єкта над провідною поверхнею за допомогою приймача, випромінювань, що рухається на навколоземній орбіті, що включає прийом сигналів, вимір довжини хвилі сигналів і амплітуди сигналів, додатково вимірюють період інтерференційних флуктуацій амплітуди прийнятих сигналів, після чого визначають висоту джерела випромінювання по наступній формулі: 1 50 55 2 h Sin Cos 1 1 , 2 де - обмірювана довжина хвилі випромінюваного сигналу; Τ - обмірюваний період інтерференційних флуктуацій сигналу; - обмірюваний кут візування положення джерела випромінювань щодо вертикалі. 2 При цьому К = H/V cos , де Η - висота польоту носія приймача випромінювань над провідною поверхнею; V - швидкість польоту приймача випромінювань. Таким чином, додатковий вимір періоду інтерференційних флуктуацій амплітуди прийнятих сигналів дозволяє підвищити точність визначення просторового положення джерела випромінювання, спростити практичну реалізацію при розвідці об'єктів, що перебувають на малих висотах над провідною поверхнею. 1 UA 75952 U 5 10 15 20 25 30 35 40 Суть корисної моделі пояснюється ілюстрацією (фіг. 1), на якій наведена структурна схема пристрою, що реалізує запропонований спосіб. Цей пристрій складається з випромінювача електромагнітного сигналу 1, що випромінює електромагнітний сигнал 2 головним пелюстком діаграми спрямованості й електромагнітний сигнал бічного пелюстка 3 діаграми спрямованості, відбитий від провідної поверхні 4. Електромагнітні сигнали 2 і 3 приймаються й аналізуються за допомогою приймача випромінювань 5, що рухається на навколоземній орбіті. Робота даного пристрою відбувається в такий спосіб. Об'єкт із випромінювачем електромагнітної хвилі 1 випромінює головним пелюстком діаграми спрямованості сигнал 2, а бічним пелюстком діаграми спрямованості сигнал 3. Сигнал 2 і відбитий сигнал 3 від провідної поверхні 4 приймаються приймачем випромінювань 5. Прийнятий і проаналізований сигнал 2 подає певну інформацію про об'єкт випромінювання 1, але з його допомогою не можна визначити просторове положення об'єкта випромінювання 1, тобто висоту його розташування над провідною поверхнею. Інформацію про висоту дає сигнал 3, переданий за допомогою бічного пелюстка діаграми спрямованості, що відбивається від провідної поверхні 4 і прийнятий і аналізований приймачем 5. Розглянемо одержання позитивного ефекту від використання пропонованого способу. Для цього скористаємося фігурами 2 і 3. Введемо наступні позначення: 1=ΟΝ - різниця ходу прямого ΡА й відбитий РОВ променів; h - висота об'єкта з випромінювачем електромагнітних хвиль над рівнем провідної поверхні m (наприклад, над поверхнею моря); Η - висота польоту прийомного пристрою; V - швидкість польоту прийомного пристрою; - довжина хвилі випромінюваного сигналу; - кут прийому електромагнітного сигналу; - збільшення кута при 2 переміщенні прийомного пристрою на відстань S. Позначимо через К = H/V Cos . Сигнал, прийнятий прийомним пристроєм, позначений 1-1 (фіг. 3) і може носити інтерференційний характер, якщо приймається прямий А і відбитий В промені (фіг. 2). Відбитий промінь може формуватися при наявності бічного пелюстка діаграми спрямованості антени об'єкта або при досить широкому головному пелюстку діаграми спрямованості антени об'єкта. При русі прийомного пристрою по орбіті кут прийому випромінювання зміняється. При цьому змінюється й різниця ходу прямого й відбитого променів, що приводить до виникнення характерної інтерференційної картини з періодом інтерференції Т. Виявляється, що висота розташування випромінювача електромагнітних хвиль пов'язана з періодом Т. Дійсно, користуючись прийнятими позначеннями, запишемо 1=2h Cos φ Зміна різниці ходу при зміні кута на φ 1 = 2h[Cos( + ) - Cos ] = 2h(Cos Cos - Sin Sin - Cos ) = = 2h[-Cos (1 - Cos ) - Sin Sin ] = - 2h[Cos ( 1 - 1 - Sin 2 ) + Sin Sin ]. Запишемо вираз для двох сусідніх максимумів інтерференційної картини 2hCos 1 - 1 - Sin 2 Sin Sin ; h / 2Cos 1 - 1 - Sin 2 Sin Sin ; (1) 1 Sin S Sin . Cos Cos Cos 2 Шлях, пройдений прийомним пристроєм за час, що відповідає періоду інтерференції Т, дорівнює S=VT. Тоді, згідно фіг. 3, (2) Sin VT Cos 2 / . З огляду на (2), вираз для h прийме вид 1 . h 2 2 Sin Cos 1 1 Таким чином, висота розташування об'єкта з випромінювачем електромагнітних хвиль дійсно пов'язана з періодом інтерференції. Наприклад, при φ =0, К>>1 2 UA 75952 U 2 5 10 h . Джерела інформації: 1. Ширман Я.Д. Теоретические основы радиолокации. Μ. "Сов. радио", 1970. 2. Ягольников С.В. Разностный метод определения координат летательных аппаратов по сигналам их радиовысотомеров одним бортовым средством разведки. Радиотехника (Журнал в журнале), N 5, 1997. 3. Ягольников СВ. Корреляционно-экстремальный метод определения координат воздушных объектов по сигналам их радиовысотомеров. Радиотехника (Журнал в журнале), N 5, 1997. 4. Патент США N 4626861 от 2.12.1986 г. МПК G01S 3/02 - прототип. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 Спосіб визначення висоти випромінюючого об'єкта над провідною поверхнею за допомогою приймача випромінювань, що рухається на навколоземній орбіті, що включає прийом сигналів, вимір довжини хвилі сигналів і амплітуди сигналів, який відрізняється тим, що в ньому додатково вимірюють період інтерференційних флуктуацій амплітуди прийнятих сигналів, після чого визначають висоту джерела випромінювання по наступній формулі: 1 20 25 2 h Sin Cos 1 1 , 2 де - обмірювана довжина хвилі випромінюваного сигналу; Τ - обмірюваний період інтерференційних флуктуацій сигналу; - обмірюваний кут візування положення джерела випромінювань щодо вертикалі; 2 К = H/V cos , де Η - висота польоту носія приймача випромінювань над провідною поверхнею; V - швидкість польоту приймача випромінювань. 3 UA 75952 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of height of emitting object over conductive surface by means of radiation detector that moves by earth orbit
Автори англійськоюKoniakhin Hryhorii Fateievych, Makarov Lev Boryhsovych, Maleev Ihor Yuriiovych
Назва патенту російськоюСпособ определения высоты излучающего объекта над проводящей поверхностью с помощью приемника излучения, который движется на околоземной орбите
Автори російськоюКоняхин Григорий Фатеевич, Макаров Лев Борисович, Малеев Игорь Юрьевич
МПК / Мітки
МПК: G01S 3/02
Мітки: орбіти, об'єкта, спосіб, висоті, рухається, поверхнею, приймача, визначення, навколоземній, випромінюючого, провідною, допомогою, випромінювань
Код посилання
<a href="https://ua.patents.su/6-75952-sposib-viznachennya-visoti-viprominyuyuchogo-obehkta-nad-providnoyu-poverkhneyu-za-dopomogoyu-prijjmacha-viprominyuvan-shho-rukhaehtsya-na-navkolozemnijj-orbiti.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення висоти випромінюючого об’єкта над провідною поверхнею за допомогою приймача випромінювань, що рухається на навколоземній орбіті</a>
Спосіб визначення атрофії висоти коміркового відростка при захворюваннях тканин пародонта за допомогою рентгеноморфометричного дослідження
Номер патенту: 54482
Опубліковано: 10.11.2010
Автори: Данилко Роман Орестович, Андрійців Степан Степанович, Шуклін Вадим Анатолійович
Мітки: рентгеноморфометричного, висоті, коміркового, атрофії, тканин, пародонта, відростка, дослідження, визначення, допомогою, спосіб, захворюваннях
Формула / Реферат:
Спосіб визначення атрофії висоти коміркового відростка при захворюваннях тканин пародонта за допомогою рентгеноморфометричного дослідження, що включає прицільну рентгенографію за допомогою стандартного позиціонера, що утримується зубами пацієнта, до і після лікування та порівняння отриманих результатів на рентгенологічних знімках, який відрізняється тим, що порівняння отриманих результатів, а саме визначення атрофії висоти коміркового...
Спосіб вимірювання висоти дзеркала рідкого металу в кристалізаторі та зонд для визначення такої висоти
Номер патенту: 98880
Опубліковано: 25.06.2012
Автори: Арцбергер Маттіас, Ліфтухт Дірк, Плоциннік Уве
МПК: B22D 11/18, G01F 23/292, G01K 11/32, B22D 2/00, G01F 23/22, B22D 11/20
Мітки: спосіб, вимірювання, визначення, такої, кристалізаторі, рідкого, висоті, дзеркала, металу, зонд
Формула / Реферат:
1. Спосіб вимірювання висоти дзеркала рідкого металу в кристалізаторі (1) для розливання металу, при цьому для визначення висоти дзеркала металу вимірюють розподіл температури в зоні дзеркала металу по висоті кристалізатора (1), при цьому вимірювання температури здійснюють за допомогою одного або декількох вимірювальних волокон, виконаних у вигляді світловоду, і/або за допомогою щонайменше одного вимірювального зонда, який закладають в мідну...
Спосіб і пристрій для визначення положення видовженого об’єкта відносно поверхні тіла-перепони за допомогою електромагнітного випромінювання
Номер патенту: 69402
Опубліковано: 15.09.2004
Автори: Теллєр Стеен, Лундгрен Ян, Бруун Ніколай, Обое Єнсен Томас
МПК: B23K 26/02, G01S 17/06, G01B 11/00, B23K 26/04, G01B 15/00
Мітки: поверхні, випромінювання, об'єкта, положення, електромагнітного, допомогою, визначення, тіла-перепони, видовженого, відносної, пристрій, спосіб
Формула / Реферат:
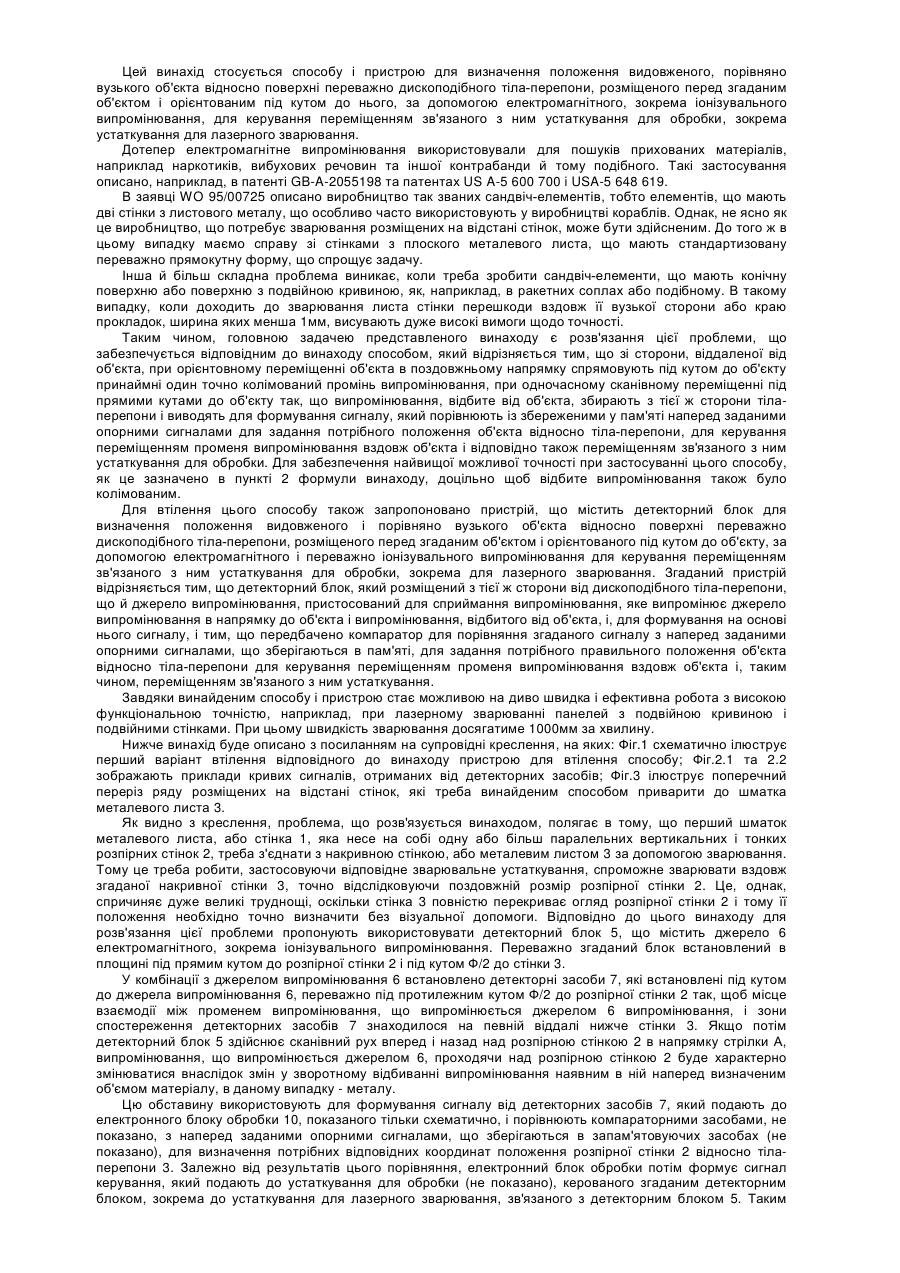
1. Спосіб визначення положення видовженого, порівняно вузького об'єкта відносно поверхні переважно дископодібного тіла-перепони, розміщеного перед згаданим об'єктом і орієнтованого під кутом до нього, за допомогою електромагнітного випромінювання, зокрема іонізувального випромінювання, для керування переміщенням з'єднаного з ним устаткування для обробки, зокрема для лазерного зварювання, який відрізняється тим, що зі сторони тіла-перепони,...
Пристрій для визначення координат рухомого випромінюючого об’єкта
Номер патенту: 46245
Опубліковано: 15.11.2004
Автори: Стеріополо Євген Анатолійович, Тітов Валерій Сергійович, Остапов Анатолій Олександрович, Радченко Октябрина Антонівна, Чигирин Олег Трохимович
Мітки: об'єкта, випромінюючого, координат, пристрій, рухомого, визначення
Формула / Реферат:
Пристрій для визначення координат рухомого випромінюючого об'єкта, що складається із апаратури ведучого та веденого приймальних пунктів, причому апаратура ведучого приймального пункту містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, перший блок обчислення відстані, датчик швидкості, датчик курсу, пристрій індикації, в якому перший вхід антени через привід антени сполучений з першим виходом...
Спосіб регулювання температури випромінюючого факела газового пальника та газовий пальник з регульованою температурою випромінюючого факела
Номер патенту: 56318
Опубліковано: 15.05.2003
Автори: Шеін Володимир Іванович, Груневельд Якобус Йоханнес
МПК: F23D 23/00, F23D 14/38, F23D 14/00
Мітки: випромінюючого, факела, газовий, пальник, температури, спосіб, регульованою, регулювання, газового, температурою, пальника
Формула / Реферат:
1. Спосіб регулювання температури випромінюючого факела газового пальника, у якому створюють два потоки пального газу та потік повітря та спалюють потоки пального газу у режимах факельного горіння, які дають різну температуру факела, причому перший потік пального газу, який охоплює другий потік пального газу, спалюють до повного згоряння, температуру регулюють шляхом регулювання витрати у першому з потоків пального газу, контролюють параметри...
Попередній патент: Генератор перешкод
Наступний патент: Пристрій для встановлення реперів на підземних трубопроводах для проведення інструментальних вимірювань при підземному вийманні вугілля
Випадковий патент: Робочий циліндр пароповітряного молота