Дослідницький стенд апробації алгоритмів керування складними електромеханічними системами
Номер патенту: 76508
Опубліковано: 10.01.2013
Автори: Полілов Єгор Володимирович, Рябенький Володимир Іванович, Скорик Сергій Петрович, Руднєв Євген Сергійович, Кунак Микола Олександрович, Батрак Андрій Михайлович, Горєлов Павло Валерійович

Формула / Реферат
Дослідницький стенд апробації алгоритмів керування складними електромеханічними системами, який складається із двох електричних машин та живлячих їх силових перетворювачів, набору датчиків для виміру й контролю електричних і механічних параметрів, програмованого контролера та ПЕОМ, який відрізняється тим, що в нього введений механізм програмно-апаратної імітації технологічних процесів на базі електроприводів змінного струму та силових перетворювачів частоти із мікропроцесорними системами керування, блок механічної системи з'єднання електродвигунів із змінними параметрами, програмований контролер, з'єднаний із програмними блоками керування силових частотних перетворювачів та ПЕОМ, силові частотні перетворювачі, з'єднані із платою збору й обробки даних та апаратно обчислювальною платформою на базі мікроконтролера і далі ПЕОМ - з одного боку, та електродвигунами з іншого.
Текст
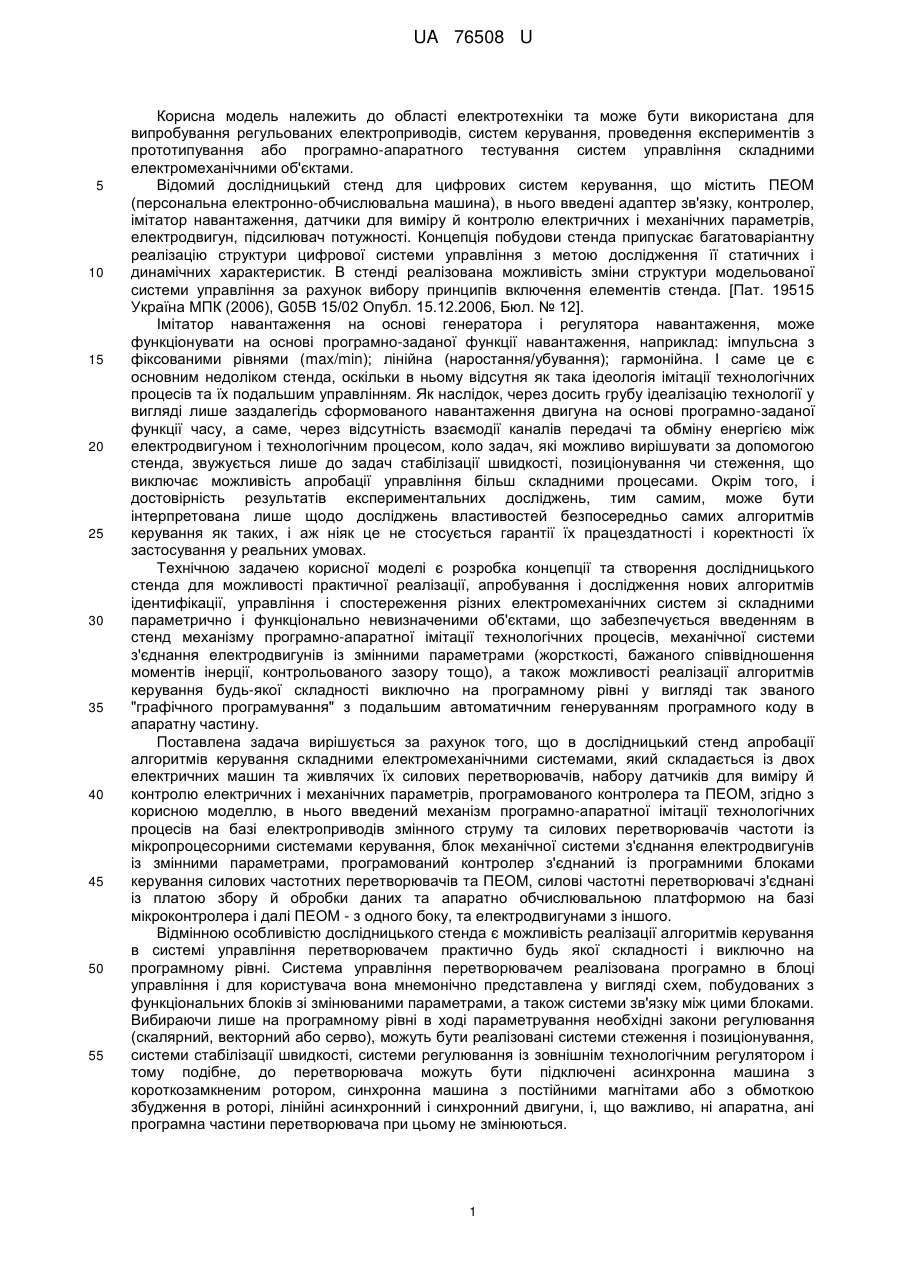
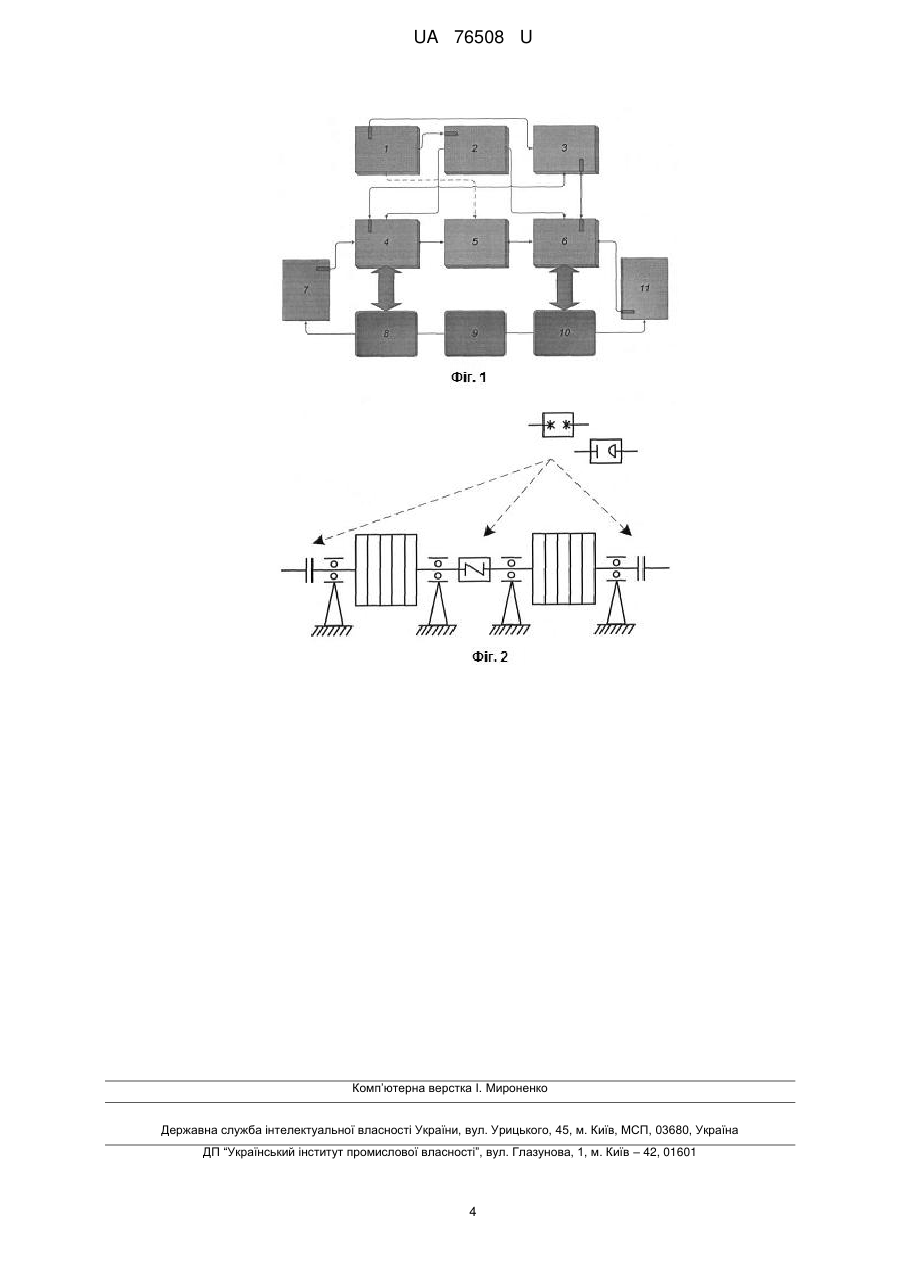
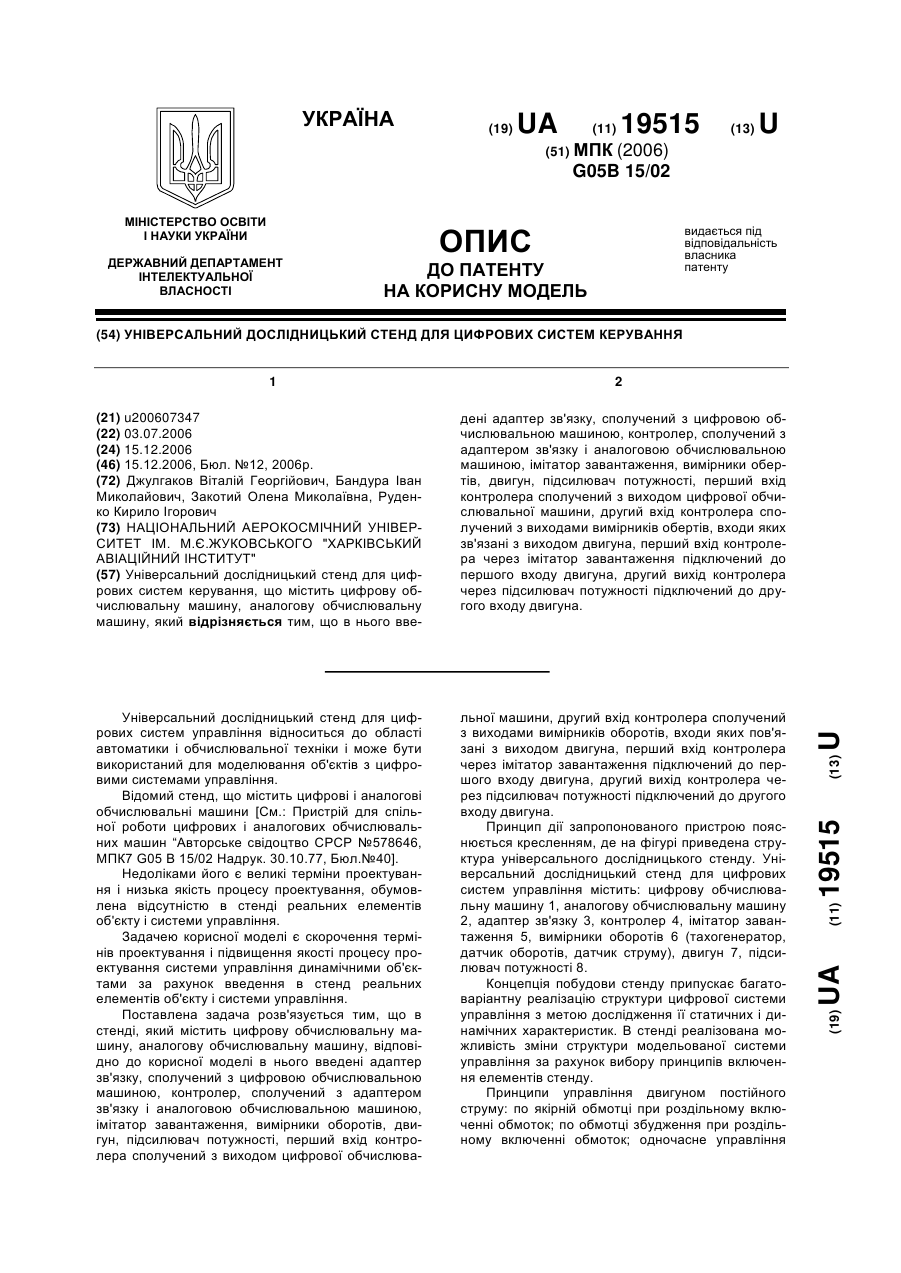
Реферат: Дослідницький стенд апробації алгоритмів керування складними електромеханічними системами складається із двох електричних машин та живлячих їх силових перетворювачів, набору датчиків для виміру й контролю електричних і механічних параметрів, програмованого контролера та ПЕОМ. В нього введений механізм програмно-апаратної імітації технологічних процесів на базі електроприводів змінного струму та силових перетворювачів частоти із мікропроцесорними системами керування. Блок механічної системи з'єднання електродвигунів із змінними параметрами. Програмований контролер з'єднаний із програмними блоками керування силових частотних перетворювачів та ПЕОМ. Силові частотні перетворювачі з'єднані із платою збору й обробки даних та апаратно обчислювальною платформою на базі мікроконтролера і далі ПЕОМ - з одного боку, та електродвигунами з іншого. UA 76508 U (12) UA 76508 U UA 76508 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до області електротехніки та може бути використана для випробування регульованих електроприводів, систем керування, проведення експериментів з прототипування або програмно-апаратного тестування систем управління складними електромеханічними об'єктами. Відомий дослідницький стенд для цифрових систем керування, що містить ПЕОМ (персональна електронно-обчислювальна машина), в нього введені адаптер зв'язку, контролер, імітатор навантаження, датчики для виміру й контролю електричних і механічних параметрів, електродвигун, підсилювач потужності. Концепція побудови стенда припускає багатоваріантну реалізацію структури цифрової системи управління з метою дослідження її статичних і динамічних характеристик. В стенді реалізована можливість зміни структури модельованої системи управління за рахунок вибору принципів включення елементів стенда. [Пат. 19515 Україна МПК (2006), G05B 15/02 Опубл. 15.12.2006, Бюл. № 12]. Імітатор навантаження на основі генератора і регулятора навантаження, може функціонувати на основі програмно-заданої функції навантаження, наприклад: імпульсна з фіксованими рівнями (max/min); лінійна (наростання/убування); гармонійна. І саме це є основним недоліком стенда, оскільки в ньому відсутня як така ідеологія імітації технологічних процесів та їх подальшим управлінням. Як наслідок, через досить грубу ідеалізацію технології у вигляді лише заздалегідь сформованого навантаження двигуна на основі програмно-заданої функції часу, а саме, через відсутність взаємодії каналів передачі та обміну енергією між електродвигуном і технологічним процесом, коло задач, які можливо вирішувати за допомогою стенда, звужується лише до задач стабілізації швидкості, позиціонування чи стеження, що виключає можливість апробації управління більш складними процесами. Окрім того, і достовірність результатів експериментальних досліджень, тим самим, може бути інтерпретована лише щодо досліджень властивостей безпосередньо самих алгоритмів керування як таких, і аж ніяк це не стосується гарантії їх працездатності і коректності їх застосування у реальних умовах. Технічною задачею корисної моделі є розробка концепції та створення дослідницького стенда для можливості практичної реалізації, апробування і дослідження нових алгоритмів ідентифікації, управління і спостереження різних електромеханічних систем зі складними параметрично і функціонально невизначеними об'єктами, що забезпечується введенням в стенд механізму програмно-апаратної імітації технологічних процесів, механічної системи з'єднання електродвигунів із змінними параметрами (жорсткості, бажаного співвідношення моментів інерції, контрольованого зазору тощо), а також можливості реалізації алгоритмів керування будь-якої складності виключно на програмному рівні у вигляді так званого "графічного програмування" з подальшим автоматичним генеруванням програмного коду в апаратну частину. Поставлена задача вирішується за рахунок того, що в дослідницький стенд апробації алгоритмів керування складними електромеханічними системами, який складається із двох електричних машин та живлячих їх силових перетворювачів, набору датчиків для виміру й контролю електричних і механічних параметрів, програмованого контролера та ПЕОМ, згідно з корисною моделлю, в нього введений механізм програмно-апаратної імітації технологічних процесів на базі електроприводів змінного струму та силових перетворювачів частоти із мікропроцесорними системами керування, блок механічної системи з'єднання електродвигунів із змінними параметрами, програмований контролер з'єднаний із програмними блоками керування силових частотних перетворювачів та ПЕОМ, силові частотні перетворювачі з'єднані із платою збору й обробки даних та апаратно обчислювальною платформою на базі мікроконтролера і далі ПЕОМ - з одного боку, та електродвигунами з іншого. Відмінною особливістю дослідницького стенда є можливість реалізації алгоритмів керування в системі управління перетворювачем практично будь якої складності і виключно на програмному рівні. Система управління перетворювачем реалізована програмно в блоці управління і для користувача вона мнемонічно представлена у вигляді схем, побудованих з функціональних блоків зі змінюваними параметрами, а також системи зв'язку між цими блоками. Вибираючи лише на програмному рівні в ході параметрування необхідні закони регулювання (скалярний, векторний або серво), можуть бути реалізовані системи стеження і позиціонування, системи стабілізації швидкості, системи регулювання із зовнішнім технологічним регулятором і тому подібне, до перетворювача можуть бути підключені асинхронна машина з короткозамкненим ротором, синхронна машина з постійними магнітами або з обмоткою збудження в роторі, лінійні асинхронний і синхронний двигуни, і, що важливо, ні апаратна, ані програмна частини перетворювача при цьому не змінюються. 1 UA 76508 U 5 10 15 20 25 30 35 40 45 50 55 60 Принцип дії стенда пояснюється функціональною схемою, зображеною на фіг. 1, основні кінематичні ланки блока механічної системи з'єднання електродвигунів наведені на фіг. 2. До складу універсального дослідницького стенда входить: 1 - офісний ПК на базі процесора AMD і модуль зв'язку для конфігурування, оптимізації та діагностики силових перетворювачів частоти; 2 - програмований контролер; 3 - багатофункціональна плата збору, обробки даних і керування; 4, 6 - електроприводи змінного струму на базі перетворювачів частоти із мікропроцесорними системами керування (випрямний модуль, інверторні модулі, блоки керування, модулі зв'язку і термінальні модулі тощо); 5 - апаратна обчислювальна платформа на базі мікроконтролера Atmel AVR; 7, 11 - імпульсні датчики швидкості/положення; 8, 10 електричні машини змінного струму; 9 - блок механічної системи з'єднання електродвигунів. Стенд працює в такий спосіб. Для забезпечення роботи комплексу в цілому, офісний персональний комп'ютер з вбудованим модулем зв'язку 1, містить відповідні програмні продукти, що необхідні, зокрема, для ініціалізації, параметрування і діагностики силових частотних перетворювачів, а також для швидкого прототипування або програмно-апаратного тестування систем управління і обробки сигналів в реальному часі, і за допомогою спеціалізованих інтерфейсних блоків, які програмно входять до мікроконтролера 5, та багатофункціональної плати збору, обробки даних і керування 3, організовують взаємодію імітаційних моделей, підсистем алгоритмів керування та підсистем відтворення технології із зовнішніми апаратними пристроями (датчики 7, 11, відповідні модулі силових перетворювачів частоти 4, 6, тощо). Тим самим проводиться можливість відтворення різноманітних технологічних процесів, а також проектування і випробування систем реального часу (елементи робототехніки, системи стеження, сучасні електроприводи прокатних станів, наприклад, головного руху прокатних клітей, натискних пристроїв, ножиць, системи стабілізації натягу смуги на безперервних станах тощо). Для дослідження алгоритмів керування і спостереження різноманітних електромеханічних систем зі складними параметрично й функціонально невизначеними об'єктами, зокрема і багатомасової пружно-в'язкої системи (з урахуванням пружностей і зазорів у механічних передачах, явищ удару, автоколивань і тому подібне) або, задля дослідження більш комплексних об'єктів, наприклад моделі процесу безперервної прокатки рулонної сталі, з метою апробування алгоритмів стабілізації міжклітьового натягу і товщини смуги і тому подібне, в дослідницькому стенді реалізовано механізм так званого напівнатурного моделювання і програмної емуляції технологічних процесів. На прикладі керування швидкістю електроприводу багатомасового пружно-в'язкого механізму в системі з підлеглим струмовим контуром розглянемо його більш детально. Маючи в своєму розпорядженні, наприклад, схему розташування мас, знаючи характер і точки прикладання зовнішніх моментів і моментів тертя, а також місця включення зазорів, можна побудувати відповідну структурну схему й отримати математичний опис всієї багатомасової системи. Очевидно, що якою б складною не була досліджувана кінематична структура, зв'язок технологічного процесу з електродвигуном здійснюється всього за двома координатами - швидкістю машини та моментом навантаження. Таким чином, якщо в даному випадку програмно зімітувати модель механічної частини виконавчого органу, величину моменту навантаження можна вважати задачею у швидкодіючий/безінерційний контур регулювання моменту навантажувальної машини, яка й сформує цей момент на валу приводного двигуна. Тим самим, завдяки використанню механізму напівнатурного моделювання і програмної емуляції технологічних процесів в дослідницькому стенді на базі системи ПЧСДПМ-СДПМ-ПЧ (ПЧ-перетворювач частоти, СДПМ - синхронний двигун з постійними магнітами) із жорсткою механікою, з'являється можливість дослідження багатомасових електромеханічних систем будь-якої складності, причому кожен з параметрів імітованої частини, наприклад момент інерції кожної маси, величина зазору в передачі, жорсткість валів, коефіцієнти в'язкого тертя в передачі тощо змінюються програмно і за бажанням дослідника. В дослідницькому стенді реалізовано - дво-, три- та чотиримасові електромеханічні системи не тільки завдяки програмній емуляції, але в тому числі і "в залізі" (фіг. 2) за допомогою пружної еластичної муфти з набором торових гумокордових еластичних елементів різної жорсткості, набору дискових інерційних мас з можливістю встановлення бажаного співвідношення моментів інерції, а також з'єднувальних муфт із комплектом пружних зубчастих вінців різної жорсткості, причому різна геометрія і розміри зубців вінця дають змогу вводити в муфти контрольований зазор, подібно існуючим в зубчастих передачах редукторів на реальних промислових об'єктах. Це важливо, в тому числі і для оцінки коректності отриманих експериментальних даних в результаті напівнатурного моделювання. Основні особливості і переваги стенда наступні: 2 UA 76508 U 5 10 15 20 - на відміну від існуючих дослідницьких стендів, ключовим вирішеним питанням є реалізована нова ідеологія досліджень і, як наслідок, концепція побудови експериментальних дослідницьких стендів. Запропоновано і реалізовано наступний ланцюжок - імітація технологічних процесів, ідентифікація невизначених параметрів керованого об'єкта, а в разі необхідності і підтвердження адекватності вибраної математичної моделі технологічного процесу, автоматизований синтез систем управління будь-якої складності ідентифікованим об'єктом, відтворення на програмному рівні модулів управління силових перетворювачів, розроблених нових алгоритмів управління і спостереження основних змінних стану, проведення експериментальних досліджень з можливістю візуалізації у вигляді графіків будь-якого параметра, аналіз отриманих результатів; - особливістю установки є можливість реалізації алгоритмів керування будь-якої складності і виключно на програмному рівні у вигляді так званого "графічного програмування" з подальшим автоматичним генеруванням програмного коду в апаратну частину, що дуже важливо, оскільки дослідникам, як фахівцям в області теорії автоматичного управління, а не програмістам зведено до мінімуму час на створення відповідного програмного коду. Це також відкриває широкі можливості при модернізації діючих електроприводів. Промислове впровадження і технічна реалізація розроблених алгоритмів керування/спостереження на реальних об'єктах можливі без будь якої зміни апаратної частини перетворювачів, лише на програмному рівні, і навіть в лабораторних умовах шляхом перепрограмування карти пам'яті модулів керування силових перетворювачів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 Дослідницький стенд апробації алгоритмів керування складними електромеханічними системами, який складається із двох електричних машин та живлячих їх силових перетворювачів, набору датчиків для виміру й контролю електричних і механічних параметрів, програмованого контролера та ПЕОМ, який відрізняється тим, що в нього введений механізм програмно-апаратної імітації технологічних процесів на базі електроприводів змінного струму та силових перетворювачів частоти із мікропроцесорними системами керування, блок механічної системи з'єднання електродвигунів із змінними параметрами, програмований контролер, з'єднаний із програмними блоками керування силових частотних перетворювачів та ПЕОМ, силові частотні перетворювачі, з'єднані із платою збору й обробки даних та апаратно обчислювальною платформою на базі мікроконтролера і далі ПЕОМ - з одного боку, та електродвигунами з іншого. 3 UA 76508 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюTest bench for approbation of control algorithms of complex electromechanical systems
Автори англійськоюPolilov Yehor Volodymyrovych, Riaben'kyi Volodymyr Ivanovych, Kunak Mykola Oleksandrovych, Rudniev Yevhen Serhiiovych, Skoryk Serhii Petrovych, Batrak Andrii Mykhailovych, Horielov Pavlo Valeriiovych
Назва патенту російськоюИспытательный стенд апробации алгоритмов управления сложными электромеханическими системами
Автори російськоюПолилов Егор Владимирович, Рябенький Владимир Иванович, Кунак Николай Александрович, Руднев Евгений Сергеевич, Скорик Сергей Петрович, Батрак Андрей Михайлович, Горелов Павел Валерьевич
МПК / Мітки
МПК: G05B 15/02, G05B 17/00
Мітки: системами, стенд, керування, апробації, складними, електромеханічними, дослідницький, алгоритмів
Код посилання
<a href="https://ua.patents.su/6-76508-doslidnickijj-stend-aprobaci-algoritmiv-keruvannya-skladnimi-elektromekhanichnimi-sistemami.html" target="_blank" rel="follow" title="База патентів України">Дослідницький стенд апробації алгоритмів керування складними електромеханічними системами</a>
Універсальний дослідницький стенд для цифрових систем керування
Номер патенту: 19515
Опубліковано: 15.12.2006
Автори: Бандура Іван Миколайович, Закотий Олена Миколаївна, Руденко Кирило Ігорович, Джулгаков Віталій Георгійович
МПК: G05B 15/02
Мітки: дослідницький, універсальний, стенд, керування, цифрових, систем
Формула / Реферат:
Універсальний дослідницький стенд для цифрових систем керування, що містить цифрову обчислювальну машину, аналогову обчислювальну машину, який відрізняється тим, що в нього введені адаптер зв'язку, сполучений з цифровою обчислювальною машиною, контролер, сполучений з адаптером зв'язку і аналоговою обчислювальною машиною, імітатор завантаження, вимірники обертів, двигун, підсилювач потужності, перший вхід контролера сполучений з виходом...
Універсальний навчальний дослідницький стенд
Номер патенту: 21234
Опубліковано: 15.03.2007
Автори: Руденко Кирило Ігоревич, Антоненко Антон Андрійович, Бандура Іван Миколайович, Джулгаков Віталій Георгійович
МПК: G01L 1/00
Мітки: універсальний, стенд, навчальний, дослідницький
Формула / Реферат:
Універсальний навчальний дослідницький стенд, що містить аналогову обчислювальну машину, підсилювач потужності, з'єднаний з блоком електромеханічних пристроїв, що містить послідовно з'єднані імітатор навантаження, двигун постійного струму з незалежним збудженням і тахогенератор, який відрізняється тим, що до нього введені інструментальна персональна електронна обчислювальна машина і цифровий контролер, які з'єднані між собою через адаптер,...
Стенд для дослідження механічних систем в автоматичному режимі керування
Номер патенту: 61115
Опубліковано: 11.07.2011
Автори: Брощак Іван Іванович, Сай Василь Зіновійович, Пономаренко Сергій Володимирович, Комар Роман Васильович, Гевко Іван Богданович, Ляшук Олег Леонтійович
МПК: G01L 5/00
Мітки: систем, механічних, автоматичному, керування, режимі, стенд, дослідження
Формула / Реферат:
Стенд для дослідження механічних систем в автоматичному режимі керування, який виконано у вигляді стаціонарної та пересувної плит, електродвигуна, досліджуваного механізму, механізму навантаження, апаратури для заміру навантаження, який відрізняється тим, що механізм навантаження виконано у вигляді генератора з паралельно під'єднаним опором навантаження і діодним мостом з латром, а як апаратура для заміру навантаження використовується давач...
Система керування лазерами, проекційними лазерами, лазерними системами, системами індикації та світловими пристроями, в тому числі інтелектуальними
Номер патенту: 35328
Опубліковано: 10.09.2008
Автори: Шевченко Сергій Анатолійович, Шевченко Ольга Вікторівна
МПК: G02F 1/00
Мітки: світловими, інтелектуальними, керування, лазерами, індикації, лазерними, числі, тому, пристроями, система, проекційними, системами
Формула / Реферат:
Система керування лазерами, проекційними лазерами, лазерними системами, системами індикації та світловими пристроями, в тому числі інтелектуальними, що містить модуль мікропроцесора, освітлювальні пристрої, обчислювальну машину, мікропроцесорний пристрій, що містить модуль мікропроцесора, модуль пам'яті, модуль звукової синхронізації, модуль живлення, програмний модуль, модулі сполучення з шинами комп'ютера та іншими портами...
Пристрій керування системами будинку
Номер патенту: 62854
Опубліковано: 12.09.2011
Автор: Панченко Денис Юрійович
МПК: G08B 19/00
Мітки: будинку, керування, системами, пристрій
Формула / Реферат:
1. Пристрій керування системами будинку, який включає модуль прийому сигналів і модулі управління, які встановлені в місцях збору інформації і виконання команди з модуля управління, який відрізняється тим, що як модуль прийому сигналів використана як мінімум одна IP-камера 2, яка по засобах wi-fi або ethernet-мережі зв'язана із відеосервером 3, причому пристрій містить як мінімум одну сенсорну панель 1, а також телефон 4, який через...
Попередній патент: Підйомник паркувальний
Наступний патент: Пристрій для продування рідкої сталі інертним газом в проміжному ковші машини безперервного лиття заготовок
Випадковий патент: Генератор для електроерозійної обробки