Технологічний робочий орган для розбирання завалів зруйнованих споруд
Номер патенту: 76910
Опубліковано: 25.01.2013
Автори: Шатов Сергій Васильович, Хмара Леонід Андрійович, Серединський Іван Валентинович, Бутенко Олександр Анатолійович, Тріфонов Іван Володимирович
Формула / Реферат
Технологічний робочий орган для розбирання завалів зруйнованих споруд, що має рукоять, рухомі зубці, гідроциліндри керування, який відрізняється тим, що внутрішні поверхні рухомих зубців виконані ребристими, причому їх менші за розміром ділянки орієнтовані всередину робочого органу, а на суміжних зубцях вони зміщені між собою.
Текст
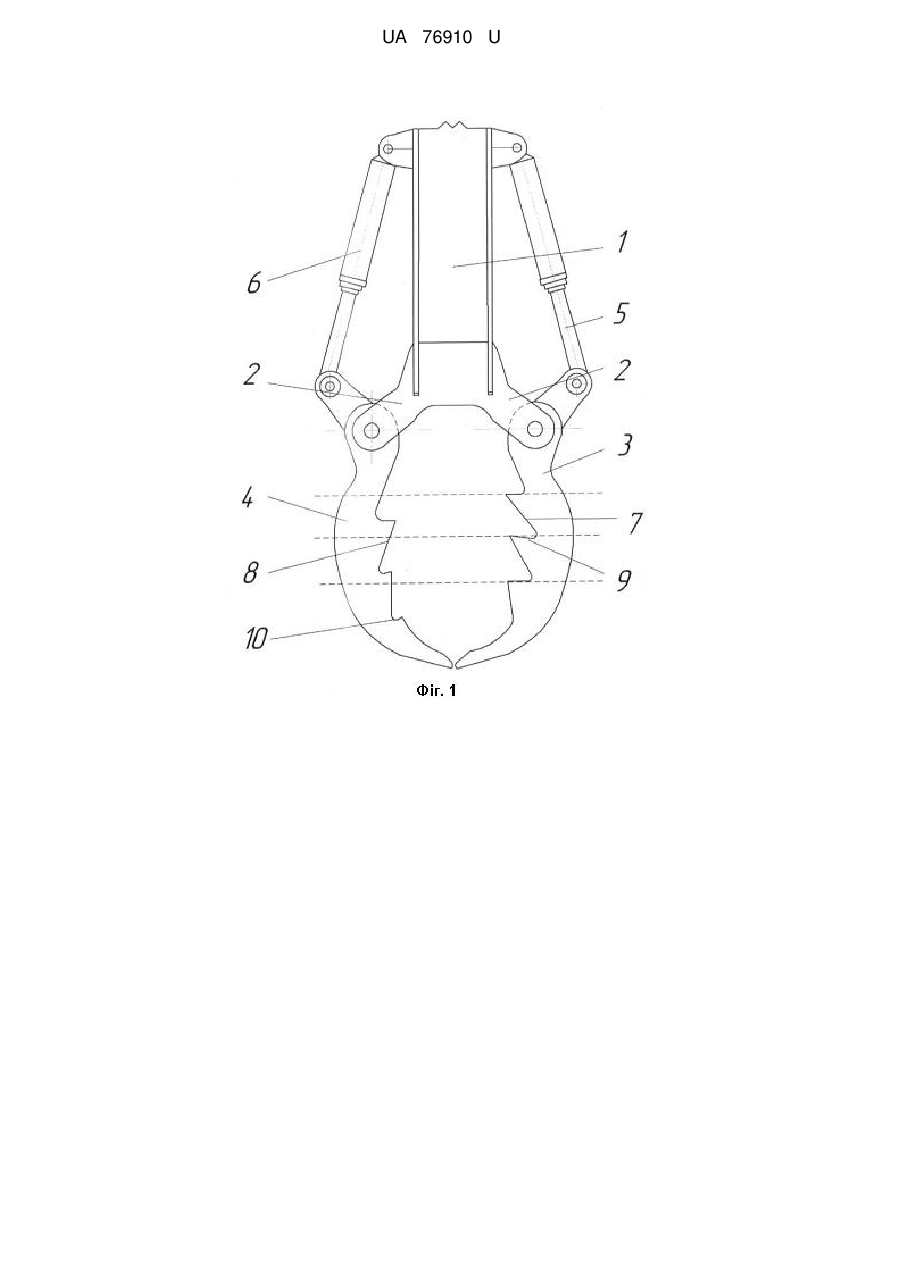
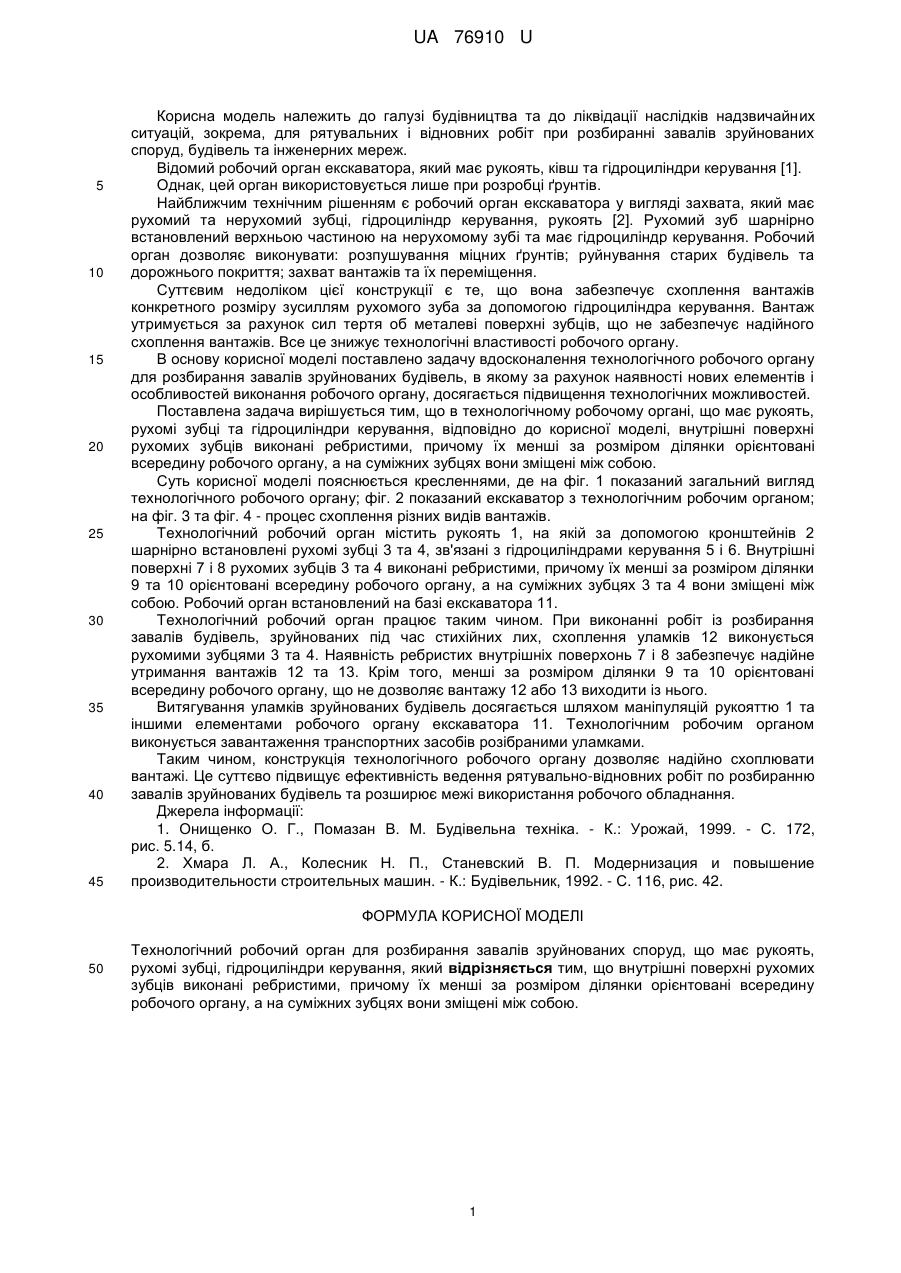
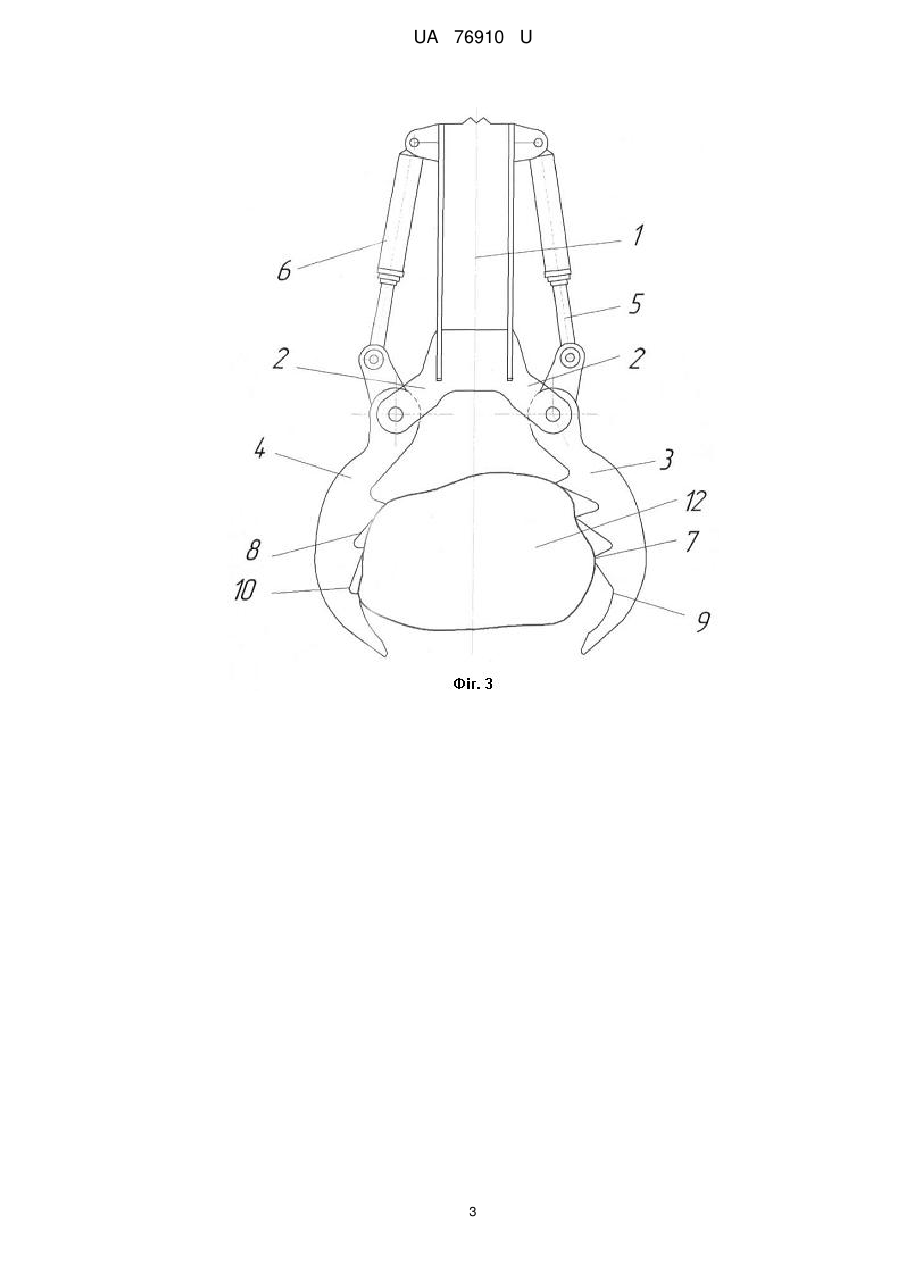
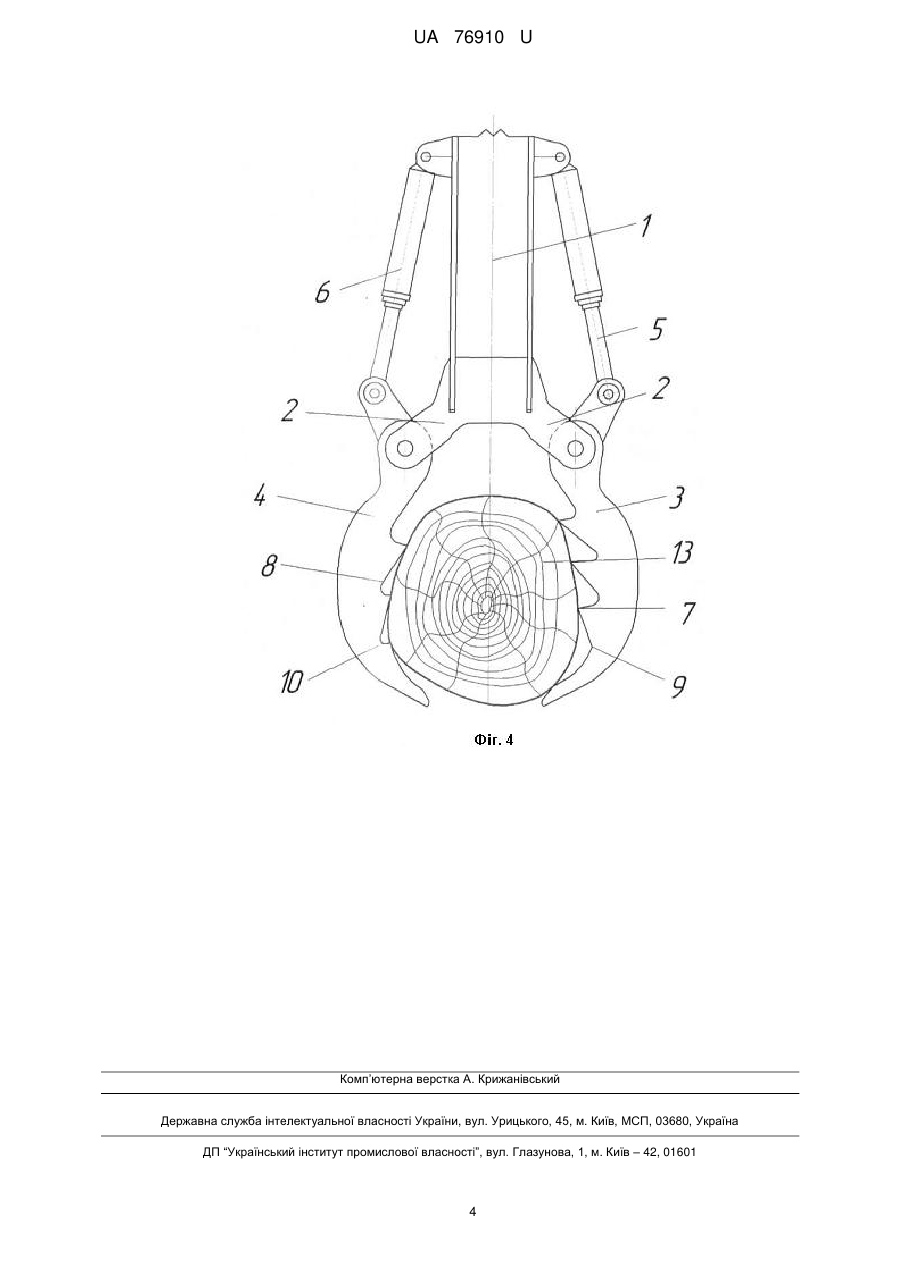
Реферат: Технологічний робочий орган для розбирання завалів зруйнованих споруд має рукоять, рухомі зубці, гідроциліндри керування. Внутрішні поверхні рухомих зубців виконані ребристими, причому їх менші за розміром ділянки орієнтовані всередину робочого органу, а на суміжних зубцях вони зміщені між собою. UA 76910 U (12) UA 76910 U UA 76910 U 5 10 15 20 25 30 35 40 45 Корисна модель належить до галузі будівництва та до ліквідації наслідків надзвичайних ситуацій, зокрема, для рятувальних і відновних робіт при розбиранні завалів зруйнованих споруд, будівель та інженерних мереж. Відомий робочий орган екскаватора, який має рукоять, ківш та гідроциліндри керування [1]. Однак, цей орган використовується лише при розробці ґрунтів. Найближчим технічним рішенням є робочий орган екскаватора у вигляді захвата, який має рухомий та нерухомий зубці, гідроциліндр керування, рукоять [2]. Рухомий зуб шарнірно встановлений верхньою частиною на нерухомому зубі та має гідроциліндр керування. Робочий орган дозволяє виконувати: розпушування міцних ґрунтів; руйнування старих будівель та дорожнього покриття; захват вантажів та їх переміщення. Суттєвим недоліком цієї конструкції є те, що вона забезпечує схоплення вантажів конкретного розміру зусиллям рухомого зуба за допомогою гідроциліндра керування. Вантаж утримується за рахунок сил тертя об металеві поверхні зубців, що не забезпечує надійного схоплення вантажів. Все це знижує технологічні властивості робочого органу. В основу корисної моделі поставлено задачу вдосконалення технологічного робочого органу для розбирання завалів зруйнованих будівель, в якому за рахунок наявності нових елементів і особливостей виконання робочого органу, досягається підвищення технологічних можливостей. Поставлена задача вирішується тим, що в технологічному робочому органі, що має рукоять, рухомі зубці та гідроциліндри керування, відповідно до корисної моделі, внутрішні поверхні рухомих зубців виконані ребристими, причому їх менші за розміром ділянки орієнтовані всередину робочого органу, а на суміжних зубцях вони зміщені між собою. Суть корисної моделі пояснюється кресленнями, де на фіг. 1 показаний загальний вигляд технологічного робочого органу; фіг. 2 показаний екскаватор з технологічним робочим органом; на фіг. 3 та фіг. 4 - процес схоплення різних видів вантажів. Технологічний робочий орган містить рукоять 1, на якій за допомогою кронштейнів 2 шарнірно встановлені рухомі зубці 3 та 4, зв'язані з гідроциліндрами керування 5 і 6. Внутрішні поверхні 7 і 8 рухомих зубців 3 та 4 виконані ребристими, причому їх менші за розміром ділянки 9 та 10 орієнтовані всередину робочого органу, а на суміжних зубцях 3 та 4 вони зміщені між собою. Робочий орган встановлений на базі екскаватора 11. Технологічний робочий орган працює таким чином. При виконанні робіт із розбирання завалів будівель, зруйнованих під час стихійних лих, схоплення уламків 12 виконується рухомими зубцями 3 та 4. Наявність ребристих внутрішніх поверхонь 7 і 8 забезпечує надійне утримання вантажів 12 та 13. Крім того, менші за розміром ділянки 9 та 10 орієнтовані всередину робочого органу, що не дозволяє вантажу 12 або 13 виходити із нього. Витягування уламків зруйнованих будівель досягається шляхом маніпуляцій рукояттю 1 та іншими елементами робочого органу екскаватора 11. Технологічним робочим органом виконується завантаження транспортних засобів розібраними уламками. Таким чином, конструкція технологічного робочого органу дозволяє надійно схоплювати вантажі. Це суттєво підвищує ефективність ведення рятувально-відновних робіт по розбиранню завалів зруйнованих будівель та розширює межі використання робочого обладнання. Джерела інформації: 1. Онищенко О. Г., Помазан В. М. Будівельна техніка. - К.: Урожай, 1999. - С. 172, рис. 5.14, б. 2. Хмара Л. А., Колесник Н. П., Станевский В. П. Модернизация и повышение производительности строительных машин. - К.: Будівельник, 1992. - С. 116, рис. 42. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 Технологічний робочий орган для розбирання завалів зруйнованих споруд, що має рукоять, рухомі зубці, гідроциліндри керування, який відрізняється тим, що внутрішні поверхні рухомих зубців виконані ребристими, причому їх менші за розміром ділянки орієнтовані всередину робочого органу, а на суміжних зубцях вони зміщені між собою. 1 UA 76910 U 2 UA 76910 U 3 UA 76910 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюProcess working body for dozing destroyed buildings
Автори англійськоюKhmara Leonid Andriiovych, Shatov Serhii Vasyliovych, Trifonov Ivan Volodymyrovych, Butenko Oleksandr Anatoliiovych, Seredynskyi Ivan Valentynovych
Назва патенту російськоюТехнологический рабочий орган для разборки завалов разрушенных сооружений
Автори російськоюХмара Леонид Андреевич, Шатов Сергей Васильевич, Трифонов Иван Владимирович, Бутенко Александр Анатолиевич, Серединский Иван Валентинович
МПК / Мітки
МПК: B60P 1/54
Мітки: споруд, технологічний, робочий, орган, завалів, розбирання, зруйнованих
Код посилання
<a href="https://ua.patents.su/6-76910-tekhnologichnijj-robochijj-organ-dlya-rozbirannya-zavaliv-zrujjnovanikh-sporud.html" target="_blank" rel="follow" title="База патентів України">Технологічний робочий орган для розбирання завалів зруйнованих споруд</a>
Технологічний робочий орган для розбирання завалів зруйнованих будівель

Номер патенту: 62823
Опубліковано: 12.09.2011
Автори: Нортенко Руслан Анатолійович, Бутенко Олександр Анатолійович, Шатов Сергій Васильович, Хмара Леонід Андрійович
МПК: B60P 1/54
Мітки: зруйнованих, будівель, робочий, завалів, розбирання, технологічний, орган
Формула / Реферат:
Технологічний робочий орган для розбирання завалів зруйнованих будівель, що має рукоять, рухомий та нерухомий зубці, гідроциліндри керування, який відрізняється тим, що зовнішні поверхні рухомого та нерухомого зубців обладнані кронштейнами, в яких шарнірно встановлені додаткові зубці, зв'язані з гідроциліндрами їх керування.
Технологічне обладнання для розбирання завалів зруйнованих будівель
Номер патенту: 72251
Опубліковано: 10.08.2012
Автори: Бутенко Олександр Анатолійович, Тріфонов Іван Володимирович, Шатов Сергій Васильович, Хмара Леонід Андрійович, Серединський Іван Валентинович
МПК: B60P 1/54
Мітки: будівель, завалів, технологічне, обладнання, розбирання, зруйнованих
Формула / Реферат:
Технологічне обладнання для розбирання завалів зруйнованих будівель, що має рукоять, рухомі зубці з еластичними камерами, зв'язаними із пневматичною системою, та гідроциліндри керування, яке відрізняється тим, що зовнішні поверхні еластичних камер обладнані протекторами із виступаючими елементами.
Технологічне обладнання для розбирання завалів зруйнованих будівель

Номер патенту: 66693
Опубліковано: 10.01.2012
Автори: Тютерєв Максим Едуардович, Тріфонов Іван Володимирович, Шатов Сергій Васильович, Хмара Леонід Андрійович, Бутенко Олександр Анатолійович
МПК: B60P 1/54
Мітки: технологічне, завалів, будівель, розбирання, зруйнованих, обладнання
Формула / Реферат:
Технологічне обладнання для розбирання завалів зруйнованих будівель, що містить рукоятку, рухомі зубці і гідроциліндри керування, яке відрізняється тим, що внутрішні поверхні рухомих зубців обладнані еластичними камерами, зв'язаними із пневматичною системою.
Спосіб розбирання завалів зруйнованих споруд при ліквідації наслідків стихійних лих
Номер патенту: 61335
Опубліковано: 11.07.2011
Автори: Шатов Сергій Васильович, Хмара Леонід Андрійович
МПК: B60P 1/54
Мітки: завалів, наслідків, ліквідації, розбирання, стихійних, споруд, зруйнованих, лих, спосіб
Формула / Реферат:
Спосіб розбирання завалів зруйнованих споруд при ліквідації наслідків стихійних лих, що включає руйнування нестійких елементів споруд, який відрізняється тим, що уламки споруд після руйнування навантажують у транспортні засоби почергово телескопічними екскаваторами та ківшовими навантажувачами.
Обладнання бульдозера для розбирання завалів зруйнованих будівель

Номер патенту: 74589
Опубліковано: 12.11.2012
Автори: Ткач Сергій В'ячеславович, Хмара Леонід Андрійович, Шатов Сергій Васильович, Бутенко Олександр Анатолійович, Тріфонов Іван Володимирович
МПК: E02F 3/76
Мітки: бульдозера, зруйнованих, обладнання, розбирання, будівель, завалів
Формула / Реферат:
Обладнання бульдозера для розбирання завалів зруйнованих будівель, що містить штовхальні бруси, відвал з шарнірно встановленими зубцями та гідроциліндри керування, яке відрізняється тим, що робочі поверхні відвала і зубців обладнані еластичними камерами з рідиною, під'єднаними до пневматичної системи.
Попередній патент: Опалювач інфрачервоний трубчатий газовий
Наступний патент: Стіл виштовхувача грудки з опоки формувальної лінії
Випадковий патент: Спосіб лікування цукрового діабету 1 типу у дітей