Спосіб дискретного керування електромагнітним підвісом обертових роторів
Номер патенту: 77665
Опубліковано: 15.01.2007
Автори: Роговий Євген Дмитрович, Смірнов Михайло Михайлович, Бухолдін Юрій Сергійович, Мартиненко Геннадій Юрійович, Левашов Віктор Олександрович
Формула / Реферат
Спосіб дискретного керування електромагнітним підшипником, який полягає в тому, що вибирають величину напруги на котушки з обмотками керування, визначають факт проходження опорних шийок ротора через зафіксований рівень відхилення відносно осі статора, прийнятого за нульовий, і подають або знімають напруги на котушки з обмотками керування, який відрізняється тим, що вводять нові операції, а саме: підбором індуктивності котушок домагаються того, щоб підйом ротора з крайнього нижнього положення у крайнє верхнє відбувався до закінчення наростання струму в котушках з обмотками керування, вибирають і задають m фіксованих рівнів відхилень від нульового рівня, 2m величин швидкостей руху шийок ротора, 2m граничних значень різниці струмів у діаметрально протилежних котушках з обмотками керування, через кожен однаковий проміжок часу визначають струми у всіх котушках з обмотками керування, у напрямках керованих ступенів свободи - усі відхилення від нульового рівня і швидкості руху шийок ротора, при переході ротора через один з m рівнів формують вектор керуючих впливів, що складається з бінарних компонентів, впливають компонентами вектора на виконавчий пристрій, що у відповідності зі значеннями бінарних компонентів вектора керуючих впливів одночасно подає або знімає напруги на всі котушки з обмотками керування.
Текст
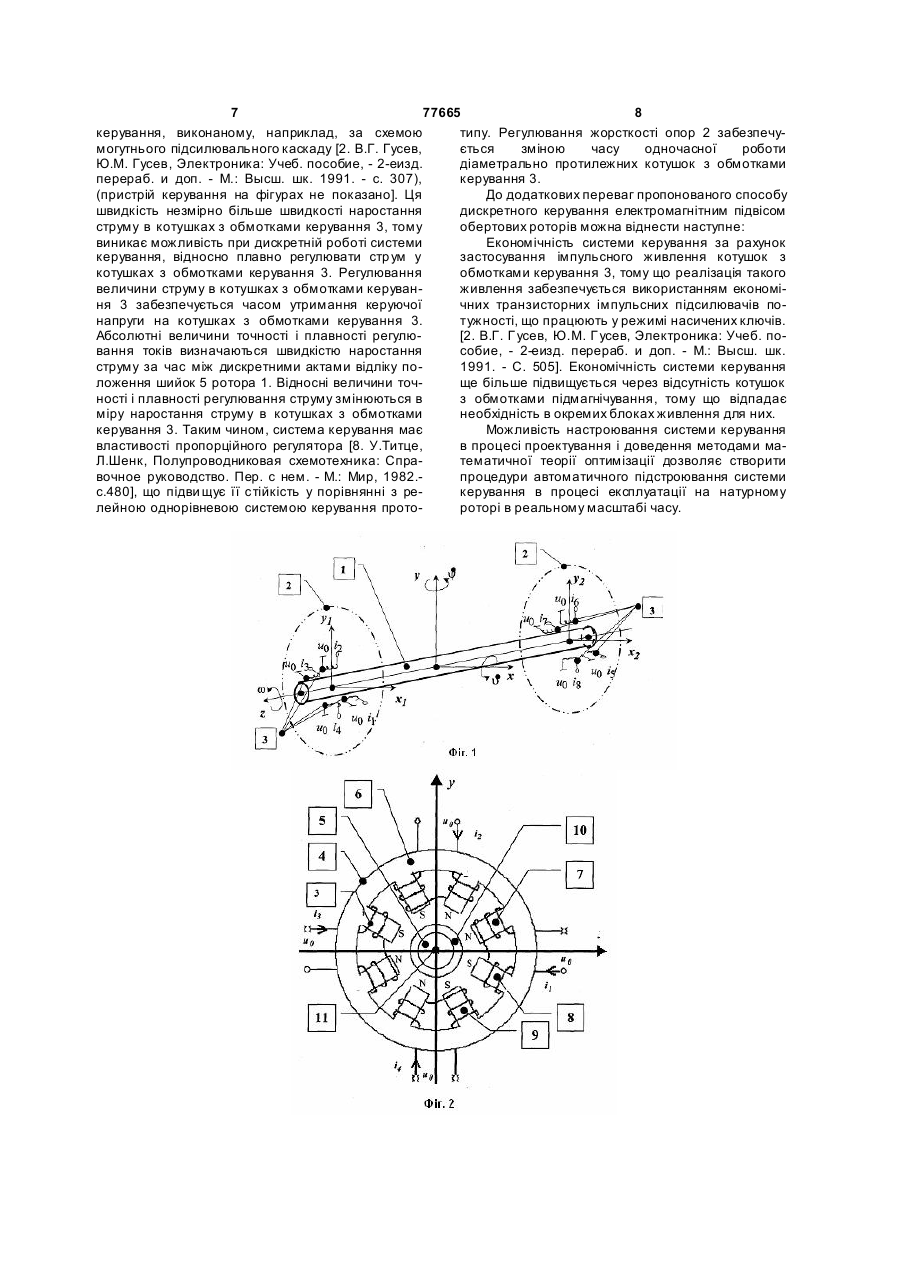
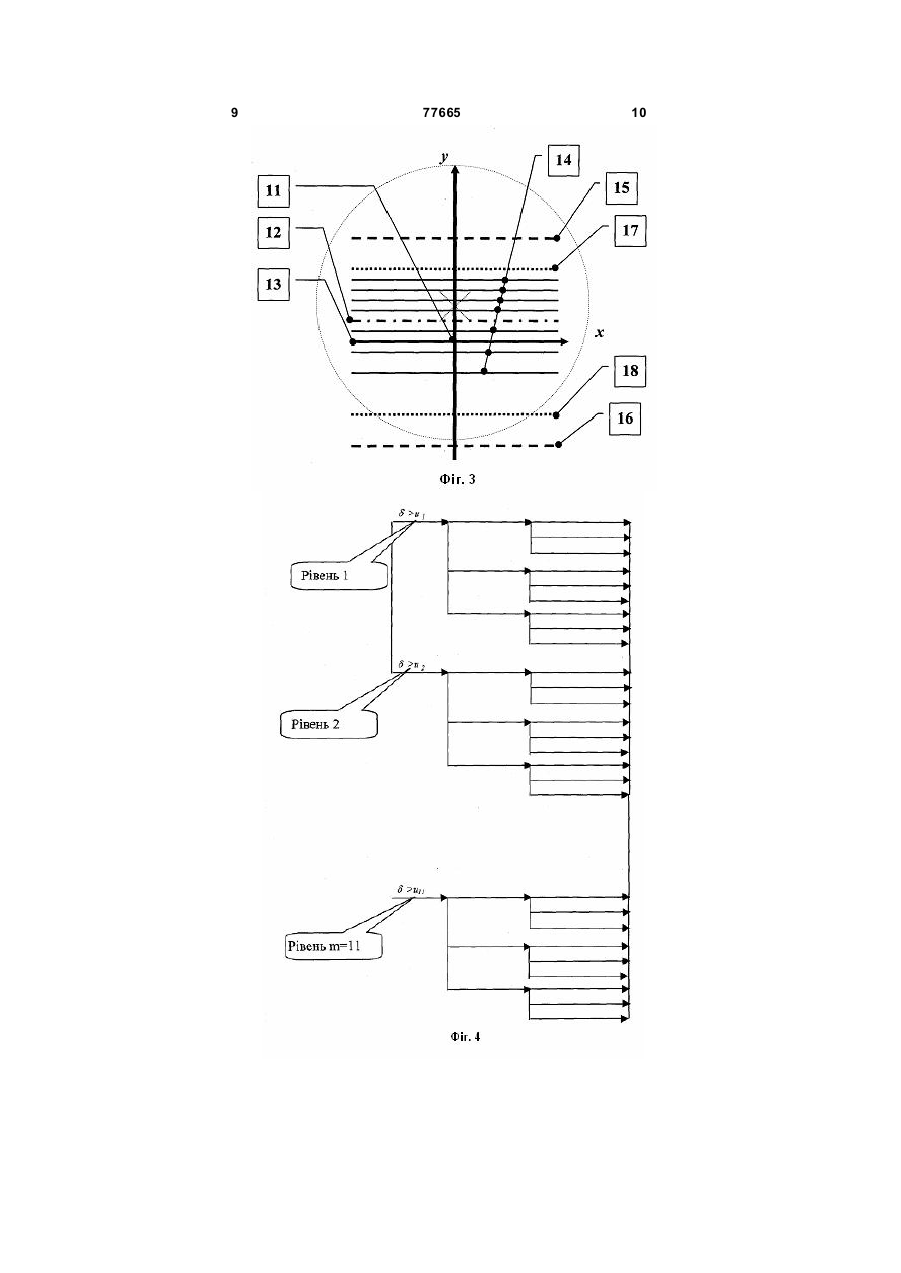
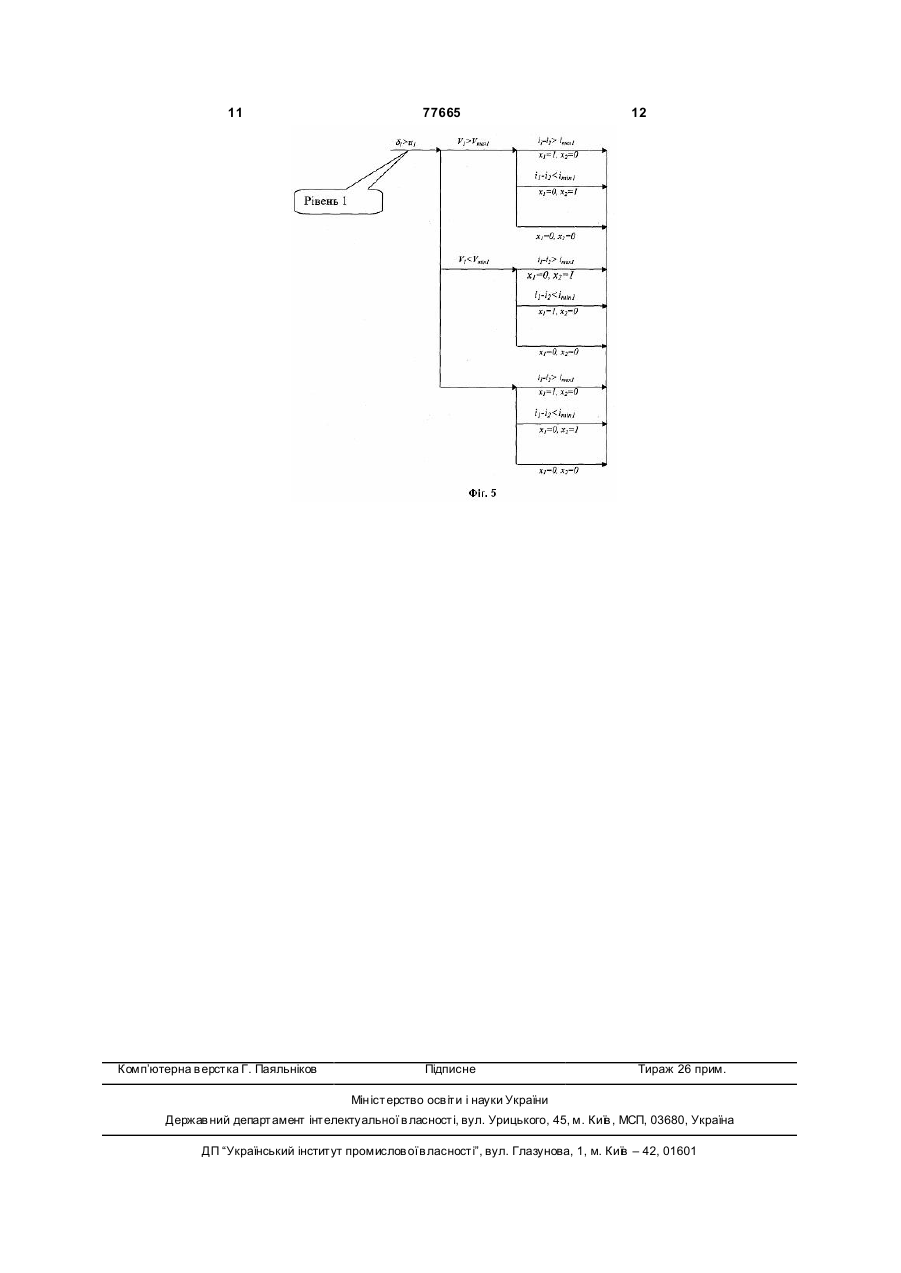
Спосіб дискретного керування електромагнітним підшипником, який полягає в тому, що вибирають величину напруги на котушки з обмотками керування, визначають факт проходження опорних шийок ротора через зафіксований рівень відхи C2 2 (19) 1 3 77665 4 йнятий за нульовий, і подають або знімають награничних значень різниці струмів у діаметрально пруги на котушки з обмотками керування. Необхідпротилежних котушках з обмотками керування, на твердість регулювання досягається за рахунок через кожен однаковий проміжок часу визначають використання керуючих обмоток з малими постійструми у всі х котушках з обмотками керування, у ними часу. Датчики положення використовують у напрямках керованих ступенів свободи усі відхидискретному режимі для контролю відхилення від лення від нульового рівня і швидкості руху шийок нульового рівня без реєстрації величини неузгоротора, при переході ротора через один з m рівнів, дженості, а також напрямку руху ротора. Енергія, формують вектор керуючих впливів, що складащо надається ротору, що вивішується, пропорційється з бінарних компонентів, впливають компонена часу впливу електромагнітної сили. У результантами вектора на виконавчий пристрій, що у відті ротор здійснює коливальний рух навколо нульоповідності зі значеннями бінарних компонентів вого рівня. Амплітуда і частота цього руху вектора керуючих впливів одночасно подає або залежить від загальної постійної часу системи резнімає напруги на всі котушки з обмотками керугулювання і живлення електромагнітів. вання. Цей спосіб має наступні недоліки: Запропонований спосіб і реалізуючий його 1. Вузький діапазон стійкості системи автомапристрій показаний на фіг.1-5. тичного керування через наявність тільки однієї На фіг.1 показана узагальнена схема взаємноступіні регулювання (при проходженні ротора чего розташування ротора з двома магнітними опорез середнє положення ротора в зазорі) і відсутрами. ність пропорційних регулюючи х ланцюжків. Це На фіг.2 представлений ескіз поперечного пеможе привести до хитливого р уху ротора, особлиреріза магнітної опори. во, при випадковому характері зовнішніх збурююНа фіг.З дана схема розбивки зазору в одному чих впливів, а також, коли ротор знаходиться в з напрямків керованого поступального ступеня газовому середовищі (повітря, вуглекислий, палисвободи. вний гази і т.п.) чи в інших випадках, коли система На фіг.4 представлена загальна логічна блокв цілому характеризується слабкою демпфіруюсхема алгоритму вибору керуючи х впливів при чою здатністю. імпульсному живленні котушок з обмотками керу2. Подорожчання всієї системи керування і вання в одному з напрямків керованого поступапідвищених енергетичних витрат за рахунок наявльного ступеня свободи. ності котушок підмагнічування і котушок регулюНа фіг.5 представлена логічна блок-схема алвання, що вимагають два гальванічне розв'язаних горитму вибору керуючих впливів при переході джерел живлення для кожного полюса з індивідучерез один з фіксованих рівнів відхилення від нуальним регулюванням струму підмагнічування на льового рівня. всіх 16 котушках (у випадку дво хопорного ротора), Опис пропонованого способу сумісний з опи3. Застосування низьковольтних джерел живсом пристрою для його реалізації. Пристрій являє лення зі споживаним струмом у сотні амперів для собою електромеханічну систему, що складається забезпечення необхідного зусилля притягання з ротора 1 (фіг.1) і К (К=2,3...)магнітних опор 2. До електромагнітів знижує КПД системи електроживскладу магнітних опор 2 входять котушки з обмотлення котушок з обмотками регулювання через ками керування 3. Конструкція всіх магнітних опор необхідність, щоб котушки регулювання мали дуже 2 однакова. Магнітна опора 2 (фіг.2) складається зі малу постійну часу, а значить і малу індуктивстатора 4 і опорної шийки 5 ротора 1. Статор 4 у ність.),. [5. Таев И.С. Электрические аппаратьі вигляді кільцевого магнітопроводу 6 з 8k (к=1,2...) автоматики й управлення. Учебн. пособие для рівномірно розташованими по окружності полюсавтузов. М., “Высш. школа", 1975., с. 64 формула ми 7,8,9, на яких установлено по одній котушці з 2.34]. обмоткою керування 3. Кожна суміжна пара котуМетою пропонованого винаходу є підвищення шок з обмотками керування 3 при подачі напруги швидкодії, розширення діапазону стійкості системи має протилежно намагнічені полюси 7, 8,(N,S), а автоматичного регулювання стосовно різних вплинамагніченість суміжного полюса 9 (S) від наступвів, що обурюють, для створення економічної саної пари котушок з обмотками керування 3 однакомонастроювальної системи регулювання. ва. На опорній шийці 5 ротора 1 розташований Поставлена мета досягається тим, що у відомагнітопровод 10 у вигляді феромагнітного кільця мий спосіб [4]. дискретного керування електромагз зазором щодо полюсів статора 4. Через геометнітним підшипником, що полягає в тім, що вибиричний центр осьової симетрії поперечного перерають величину напруги на котушки з обмотками різа статора 4 проходить система координат 11 керування, визначають факт проходження опорних (x,y,z). Вісь z показана на фіг.1. шийок ротора через зафіксований рівень відхиНа фіг.3 дана схема розбивки зазору між зовлення щодо осі статора, прийнятого за нульовий, і нішньою циліндричною поверхнею магнітопровода подають або знімають напруги на котушки з обмо10 опорної шийки 5 ротора 1 і полюсами кільцевотками керування, уводять нові операції, а саме: го магнітопровода 6 у вертикальному напрямку. підбором індуктивності котушок домагаються того, Позначений штрих-пунктирною лінією рівень 12 щоб підйом ротора з крайнього нижнього половідхилення щодо осі 13 статора 4 прийнятий за ження у крайнє верхнє відбувався до закінчення нульовий. У загальному випадку він може не збіганаростання струму в котушках з обмотками керутися з віссю 13 системи координат 11. Фіксовані вання, спеціальним образом вибирають і задають рівні 14 відхилень щодо осі 13 статора 4, обрані за m фіксованих рівнів відхилень від нульового рівня, спеціальною методикою, позначені суцільними 2m величин швидкостей руху шийок ротора, 2m тонкими лініями. Штриховими лініями 15 і 16 по 5 77665 6 значені границі зазору, лініями 17,18 позначені yn - n-тий фіксований рівень відхилення шийки крайні фіксовані рівні. 5 ротора 1 від нульового рівня 12 у напрямку одніСпосіб здійснюється таким чином. Вибирають єї з поступальних ступенів свободи, величину напруги u0, подаваного на котушки з обVmaxn, Vminn - n-ті фіксовані рівні швидкостей мотками керування 3. Індуктивність котушок з обруху шейки 5 ротора 1 у позитивному і негативномотками керування З підбирають так, щоб підйом му напрямках відповідно, шийки 5 ротора 1 із крайнього нижнього положеніmax n - n-те фіксоване максимальне граничне ня в крайнє верхнє відбувався до закінчення нарозначення різниці струмів у діаметрально протилестання струму в котушці з обмоткою керування 3. жних котушках з обмотками керування 3, Вибирають і задають: іmin n - n-те фіксоване мінімальне граничне знаm фіксованих рівнів 14 (фіг.3) відхилень від чення різниці струмів у діаметрально протилежних нульового рівня 12, котушках з обмотками керування 3, m фіксованих значень швидкостей руху шийок i1, i2 - струми відповідно у верхній і нижній па5 ротора 1 у позитивному напрямку керованого рах котушок з обмотками керування 3 (найближчих поступального ступеня свободи, до осі y). m фіксованих швидкостей руху шийок 5 ротора x1 , x2 - вихідні сигнали системи керування, во1 у негативному напрямку керованого поступальни ж бінарні компоненти вектора керуючих впливів ного ступеня свободи, (x1=x2,=1 - відповідає подачі на нижні і верхні коm фіксованих максимальних граничних знатушки з обмотками керування 3 живильного напручень різниці струмів у діаметрально протилежних ги u0, x1=x2,=0 відповідає відключенню нижніх і котушках з обмотками керування 3, верхніх котушок з обмотками керування 3). m фіксованих мінімальних граничних значень Для будь-якого керованого поступального стурізниці струмів у діаметрально протилежних котупеня свободи послідовність операцій однакова. шках з обмотками керування 3, Зміна стану діаметрально протилежних котушок з Вибір фіксованих рівнів 14 можна здійснювати обмотками керування 3 відбувається на декількох двома шляхами: (наприклад, одинадцятьох) попередньо заданих використанням математичної теорії оптимізації рівнях відхилень 14 шийки 5 ротора 1 щодо нульо[6. Г.Реклейтис, Рейвиндран А., Рзгсдел К. Оптивого рівня 12 у напрямку однієї з поступальних мизация в технике. В 2-х кн. Кн.2. Пер. с англ. - М. ступенів свободи. Мир, 1986.- с.53], коли вибір необхідних рівнів обПри положенні шийки 5 ротора 1 між обраними числюється з умов мінімуму середньоквадратичрівнями стан котушок з обмотками керування 3 не ного відхилення шийок 5 ротора 1 від нульового змінюється. рівня 12 за заданого проміжку часу, При переході шийки 5 ротора 1 з одного інтервибором монотонних і однозначних функціовалу між рівнями в інший, відбувається перехід нальних залежностей, що містять постійні коефіцісистеми керування в один з чотирьох можливих єнти і функцію номера рівня. станів (фіг.5) у відповідності з наступними чотирма yn=a[f(bn+c)]s+d, бінарними векторами керуючих впливів (компонеде f(n) функція цілочисельного аргументу n, де нти таких векторів складаються з нулів і одиниць): Вектор W1T={X1=1, X2=0,} n = 1 ¸ m - номер рівня 14 (фіг.3), a, b, c, d, s - коеВектор W2T={X1=0, X2=1,}, фіцієнти (a, b, c, d - раціональні числа, s - натураВектор W3T={X1=0, X2=0,}, льне число). Вектор W4 ={ X1=1, Х2=1,}, де T - знак транспоДо функцій f(n), що відповідають вимогам, що нування вектора в рядок накладається на функціональну залежність, можна Через кожен фіксований проміжок часу визнавіднести: x, sin, cos, tan,sinh, tanh, log,-log. Такий чають струми у всі х котушках з обмотками керуспосіб дозволяє знизити кількість коефіцієнтів, що вання 3, а в напрямках керованих ступенів свобопідлягають вибору, і спростити алгоритм їхнього ди усі швидкості руху шийок 5 ротора 1 і оптимального пошуку з умов мінімуму середньовідхилення від нульового рівня 12. При переході квадратичного відхилення шийок 5 ротора 1 від шийки 5 ротора 1 через один з m рівнів, формують нульового рівня 12. вектор керуючих впливів, що складається з, бінарАналогічно вибираються 2m величин швидконих компонентів, і впливають його компонентами стей руху шийок 5 ротора та 2m граничних значень на виконавчий пристрій, що у відповідності зі знарізниці струмів у діаметрально протилежних котученнями бінарних компонентів вектора керуючих шках з обмотками керування 3. впливів одночасно подає або знімає напруги на всі Послідовність операцій при роботі системи кекотушки з обмотками керування 3. рування в напрямку однієї з керованих поступальТому що при цифровому аналізі стану ротора них ступенів свободи показана на фіг.4, 5 у вигляді 1 зі струмами в котушках з обмотками керування 3, графа, навантаженого по дугах (7. Вельбицкий відхиленнями і швидкостями шийок 5 ротора 1, И.В. Технология программирования. -.К.: Техника, переведених у цілочисельну цифрову форму, про1984 - с.15.) водяться тільки швидкодіючі логічні операції, то На фіг.4,5 прийняті наступні позначення: для одержання вектора керуючих впливів можливе d j - поточне відхилення шийки 5 ротора 1 від використання мікропроцесорів з відносно низькою нульового рівня 12 у напрямку однієї з поступальтактовою частотою (64МГц і більш). них ступенів свободи, Швидкість наростання напруг на включених Vj - поточна швидкість руху шийки 5 ротора 1 у котушках з обмотками керування З обмежується напрямку j-того керованого ступеня свободи, часом відкриття транзисторних ключів у пристрої 7 77665 8 керування, виконаному, наприклад, за схемою типу. Регулювання жорсткості опор 2 забезпечумогутнього підсилювального каскаду [2. В.Г. Гусев, ється зміною часу одночасної роботи Ю.М. Гусев, Электроника: Учеб. пособие, - 2-еизд. діаметрально протилежних котушок з обмотками перераб. и доп. - М.: Высш. шк. 1991. - с. 307), керування 3. (пристрій керування на фігурах не показано]. Ця До додаткових переваг пропонованого способу швидкість незмірно більше швидкості наростання дискретного керування електромагнітним підвісом струму в котушках з обмотками керування 3, тому обертових роторів можна віднести наступне: виникає можливість при дискретній роботі системи Економічність системи керування за рахунок керування, відносно плавно регулювати стр ум у застосування імпульсного живлення котушок з котушках з обмотками керування 3. Регулювання обмотками керування 3, тому що реалізація такого величини струму в котушках з обмотками керуванживлення забезпечується використанням економіня 3 забезпечується часом утримання керуючої чних транзисторних імпульсних підсилювачів понапруги на котушках з обмотками керування 3. тужності, що працюють у режимі насичених ключів. Абсолютні величини точності і плавності регулю[2. В.Г. Г усев, Ю.М. Г усев, Электроника: Учеб. повання токів визначаються швидкістю наростання собие, - 2-еизд. перераб. и доп. - М.: Высш. шк. струму за час між дискретними актами відліку по1991. - C. 505]. Економічність системи керування ложення шийок 5 ротора 1. Відносні величини точще більше підвищується через відсутність котушок ності і плавності регулювання струму змінюються в з обмотками підмагнічування, тому що відпадає міру наростання струму в котушках з обмотками необхідність в окремих блоках живлення для них. керування 3. Таким чином, система керування має Можливість настроювання системи керування властивості пропорційного регулятора [8. У.Титце, в процесі проектування і доведення методами маЛ.Шенк, Полупроводниковая схемотехника: Спратематичної теорії оптимізації дозволяє створити вочное руководство. Пер. с нем. - М.: Мир, 1982.процедури автоматичного підстроювання системи с.480], що підви щує її стійкість у порівнянні з рекерування в процесі експлуатації на натурному лейною однорівневою системою керування протороторі в реальному масштабі часу. 9 77665 10 11 Комп’ютерна в ерстка Г. Паяльніков 77665 Підписне 12 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for discrete control of electromagnetic suspension of rotary rotors
Автори англійськоюRohovyi Yevhen Dmytrovych, Bukholdin Yurii Serhiiovych, Levashov Viktor Oleksandrovych
Назва патенту російськоюСпособ дискретного управления электромагнитным подвесом вращающихся роторов
Автори російськоюРоговой Евгений Дмитриевич, Бухолдин Юрий Сергеевич, Левашов Виктор Александрович
МПК / Мітки
МПК: F16C 32/04
Мітки: спосіб, роторів, підвісом, електромагнітним, обертових, керування, дискретного
Код посилання
<a href="https://ua.patents.su/6-77665-sposib-diskretnogo-keruvannya-elektromagnitnim-pidvisom-obertovikh-rotoriv.html" target="_blank" rel="follow" title="База патентів України">Спосіб дискретного керування електромагнітним підвісом обертових роторів</a>
Спосіб дискретного управління електромагнітним підшипником
Номер патенту: 39844
Опубліковано: 15.06.2001
Автори: Коваленко Іван Тихонович, Машньов Анатолій Єгорович, Розов Володимир Юрійович, Ільюхін Василь Іванович
МПК: F16C 32/00
Мітки: дискретного, підшипником, електромагнітним, спосіб, управління
Формула / Реферат:
Спосіб дискретного управління електромагнітним підшипником, який заключається в тому, що при зміщенні валу в котушки електромагнітів вводять дискретно струм, значення якого не залежить від величини зміщення, а крутість фронту обмежена тільки сталою часу котушки електромагніту і джерела живлення, який відрізняється тим, що додатково вводиться режим переміщення валу по інерції при вилучених протилежних електромагнітах, а зона регулювання...
Спосіб дискретного управління електромагнітним підшипником
Номер патенту: 23257
Опубліковано: 19.05.1998
Автори: Розов Володимир Юрійович, Заутнер Фелікс Леонідович, Машньов Анатолій Єгорович, Петров Сергій Васильович, Ільюхін Василь Іванович
МПК: F16C 32/04
Мітки: спосіб, управління, електромагнітним, підшипником, дискретного
Формула / Реферат:
Способ дискретного управления электромагнитным подшипником, заключающийся в том, что в катушки электромагнитов подают статические составляющие токов, уравновешивающие ротор при его расположении по оси подшипника, а при смещении вала агрегата формируют динамические составляющие токов так, чтобы суммарное воздействие статических и динамических токов было направлено в сторону уравновешивания вала, отличающийся тем. что динамическая составляющая...
Пристрій для керування електромагнітним віброприводом
Номер патенту: 10123
Опубліковано: 15.11.2005
Автори: Берник Павло Степанович, Чубик Роман Васильович, Пашистий Вадим Ананієвич
МПК: B65G 27/10
Мітки: віброприводом, керування, електромагнітним, пристрій
Формула / Реферат:
Пристрій для керування електромагнітним віброприводом, що включає коливну масу (робочий орган) із вібродатчиком, встановлену на пружній системі, і електромагнітний вібратор, з’єднаний із блоком керування, який відрізняється тим, що блок керування виконаний у вигляді промислового мікроконтролера із зашитою програмою корекції параметрів коливного руху та пов'язаний через інтерфейс із перетворювачем частоти з можливістю забезпечення живлення...
Спосіб відновлювання литих короткозамкнених роторів електричних машин
Номер патенту: 64312
Опубліковано: 16.02.2004
Автори: Зубков Сергій Степанович, Ткачук Микола Миколайович, Ткачук Олександр Миколайович, Каїка Василь Васильович
МПК: B22D 27/00
Мітки: короткозамкнених, спосіб, відновлювання, електричних, машин, литих, роторів
Формула / Реферат:
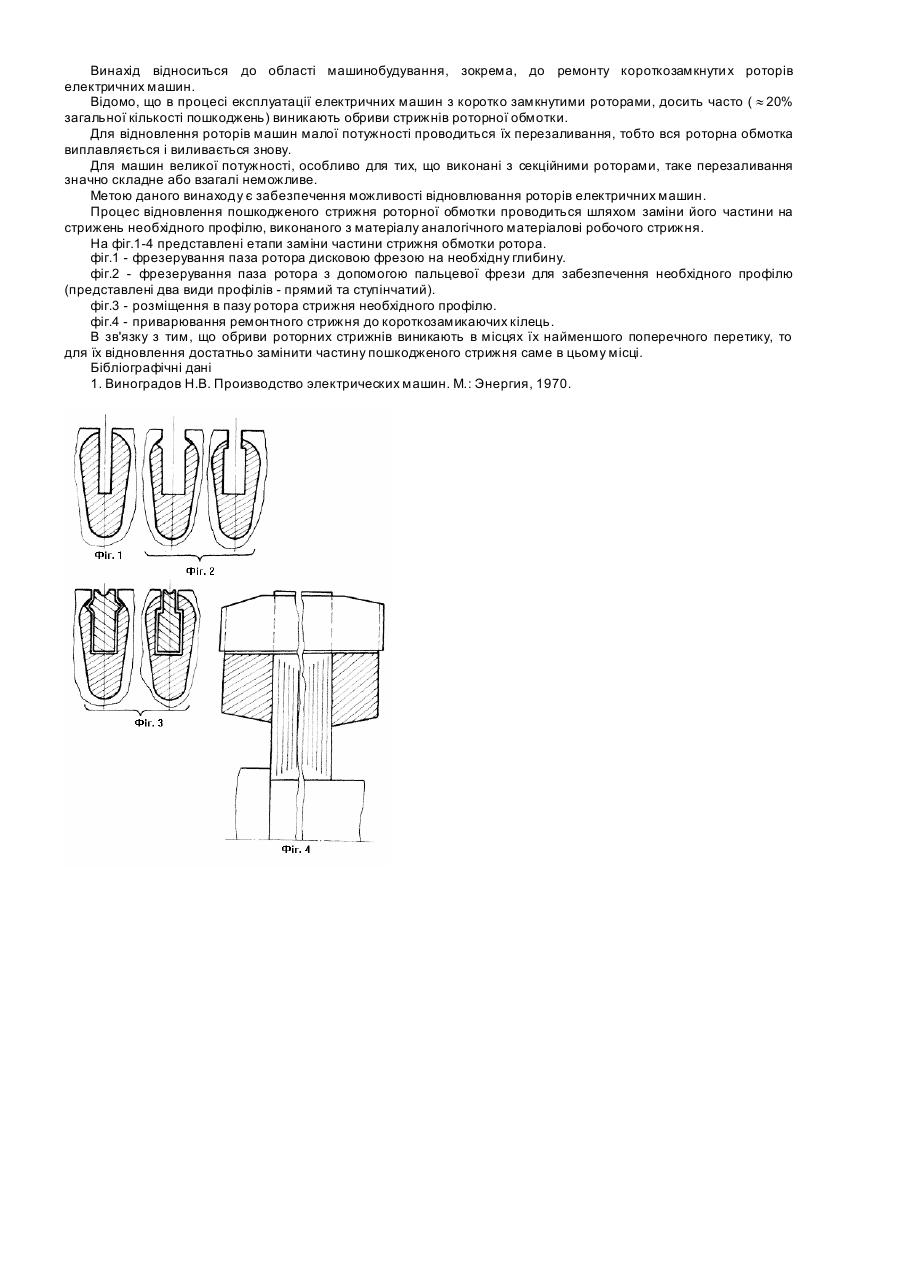
Спосіб відновлювання литих короткозамкнених роторів електричних машин, який відрізняється тим, що частина пошкодженого стрижня роторної обмотки замінюється на стрижень необхідного профілю, виконаний з матеріалу, аналогічного матеріалу робочого стрижня.
Вільнопоршневий компресор з електромагнітним приводом
Номер патенту: 52957
Опубліковано: 15.01.2003
Автори: Коміссаров Сергій Сергійович, Ахтямов Альберт Мінахметович
МПК: F04B 35/00
Мітки: вільнопоршневий, приводом, електромагнітним, компресор
Формула / Реферат:
1. Вільнопоршневий компресор із електромагнітним приводом, який містить два співвісно розташованих циліндрових блоки, що включають в себе по два опозитно розташованих циліндри із розміщеним між ними додатковим циліндром і встановленими в них із утворенням робочих камер поршнями, жорстко зв'язаними між собою, по дві співвісні привідні електромагнітні котушки, замкнені у кільцевий магнітопровід і обхоплювальний додатковий циліндр, середні та...
Попередній патент: Спосіб обробки токсичних відходів
Наступний патент: Зірочка для круглоланкового ланцюга
Випадковий патент: Підставка для квітів