Пристрій для керування електромагнітним віброприводом
Номер патенту: 10123
Опубліковано: 15.11.2005
Автори: Чубик Роман Васильович, Пашистий Вадим Ананієвич, Берник Павло Степанович
Формула / Реферат
Пристрій для керування електромагнітним віброприводом, що включає коливну масу (робочий орган) із вібродатчиком, встановлену на пружній системі, і електромагнітний вібратор, з’єднаний із блоком керування, який відрізняється тим, що блок керування виконаний у вигляді промислового мікроконтролера із зашитою програмою корекції параметрів коливного руху та пов'язаний через інтерфейс із перетворювачем частоти з можливістю забезпечення живлення електромагнітного віброприводу широтно-імпульсно модульованою синусоїдальною напругою.
Текст
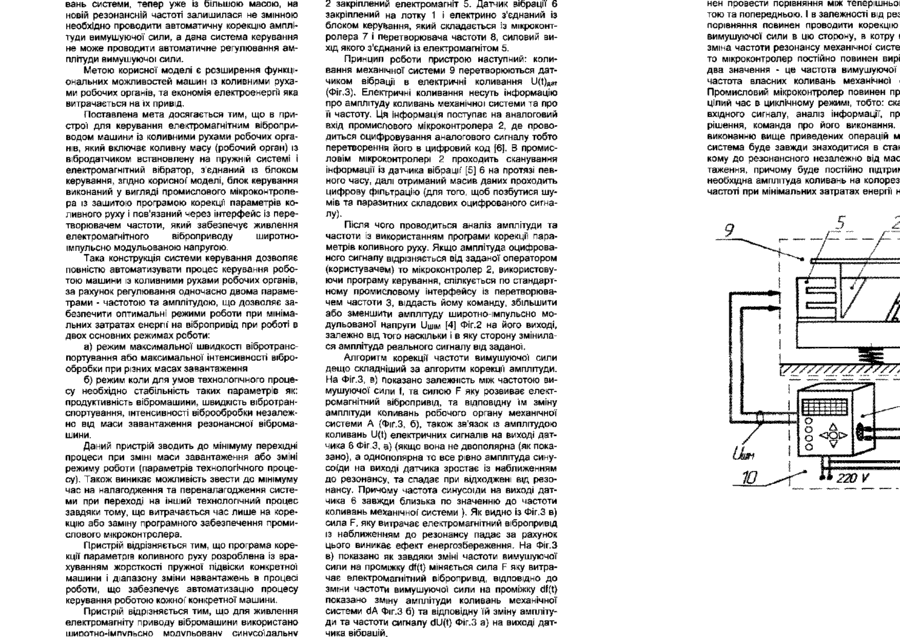
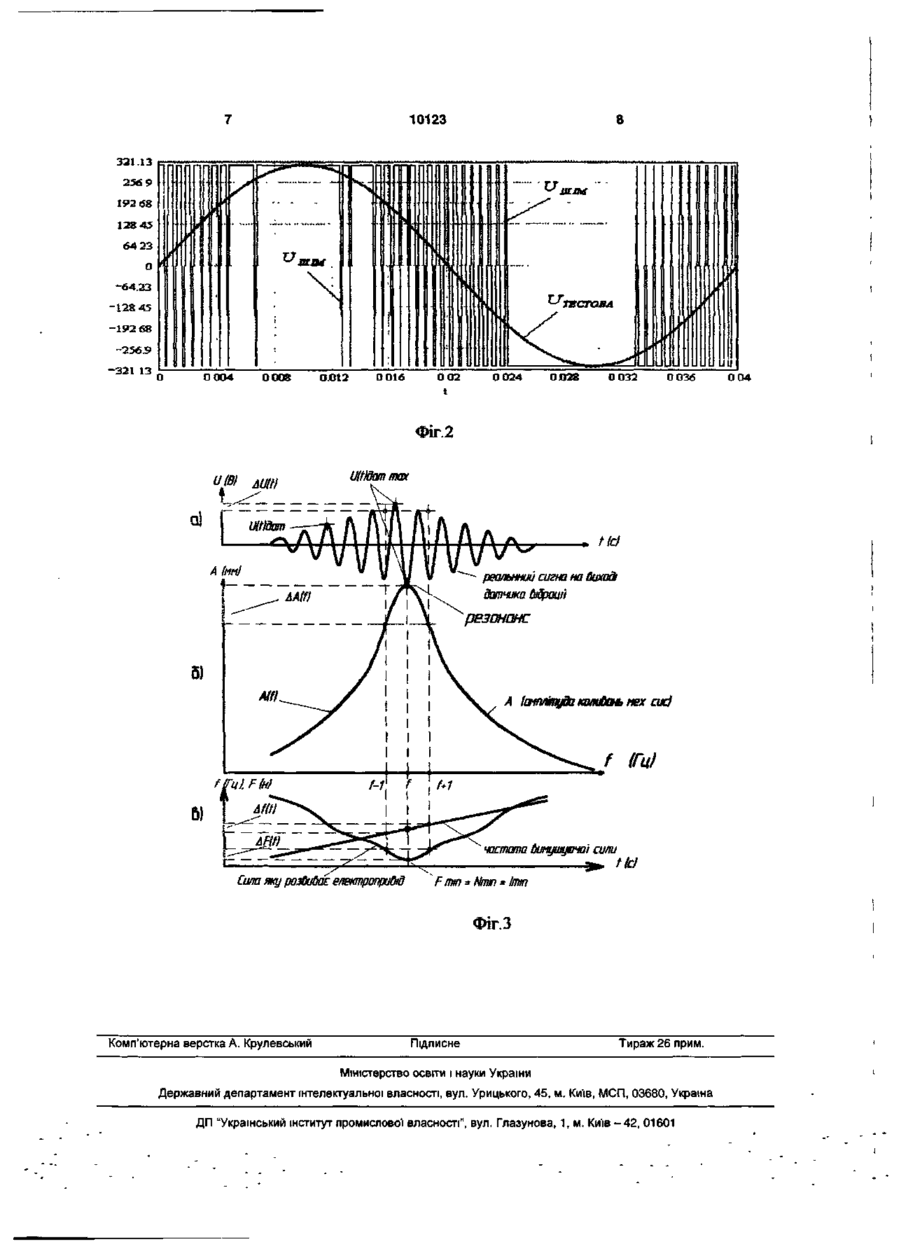
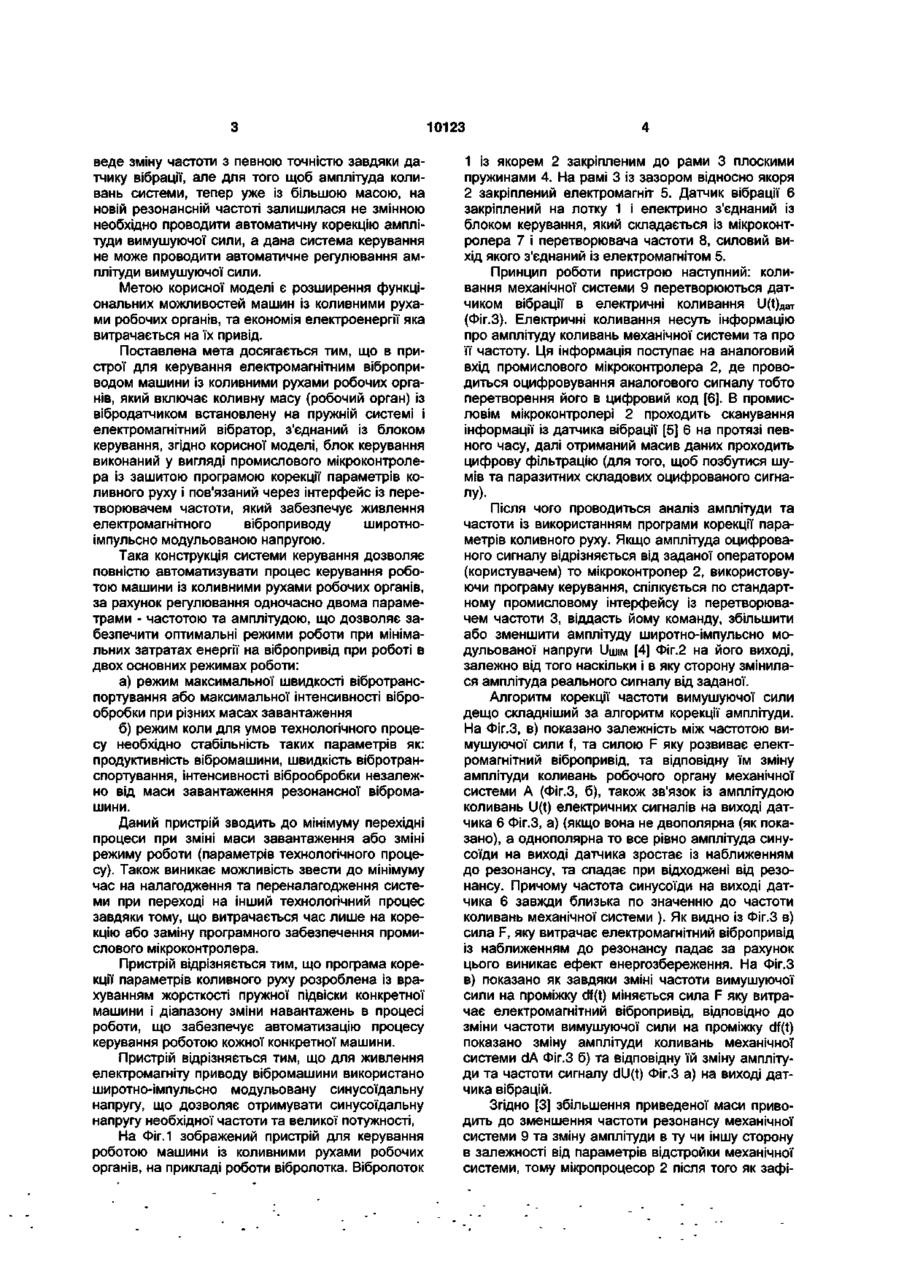
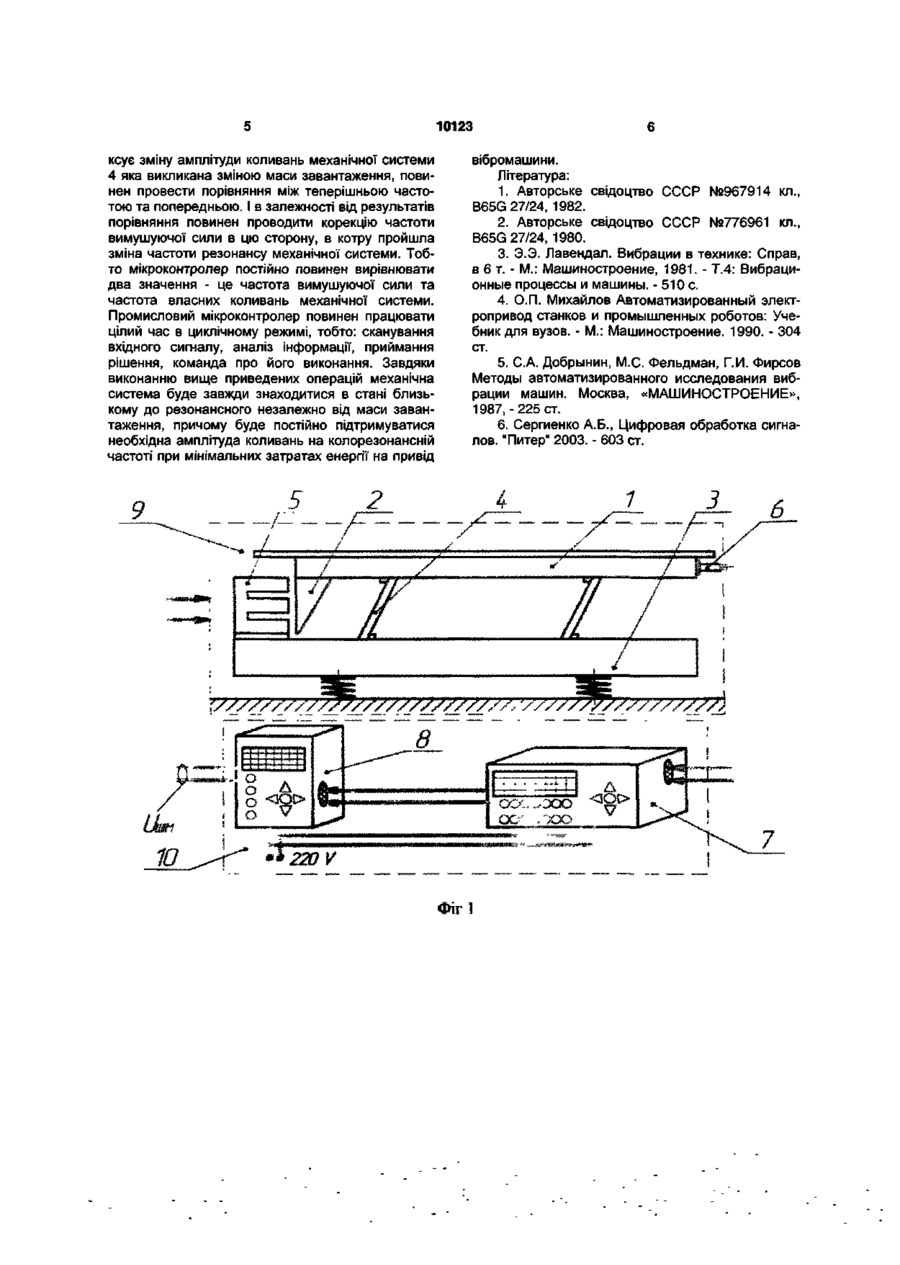
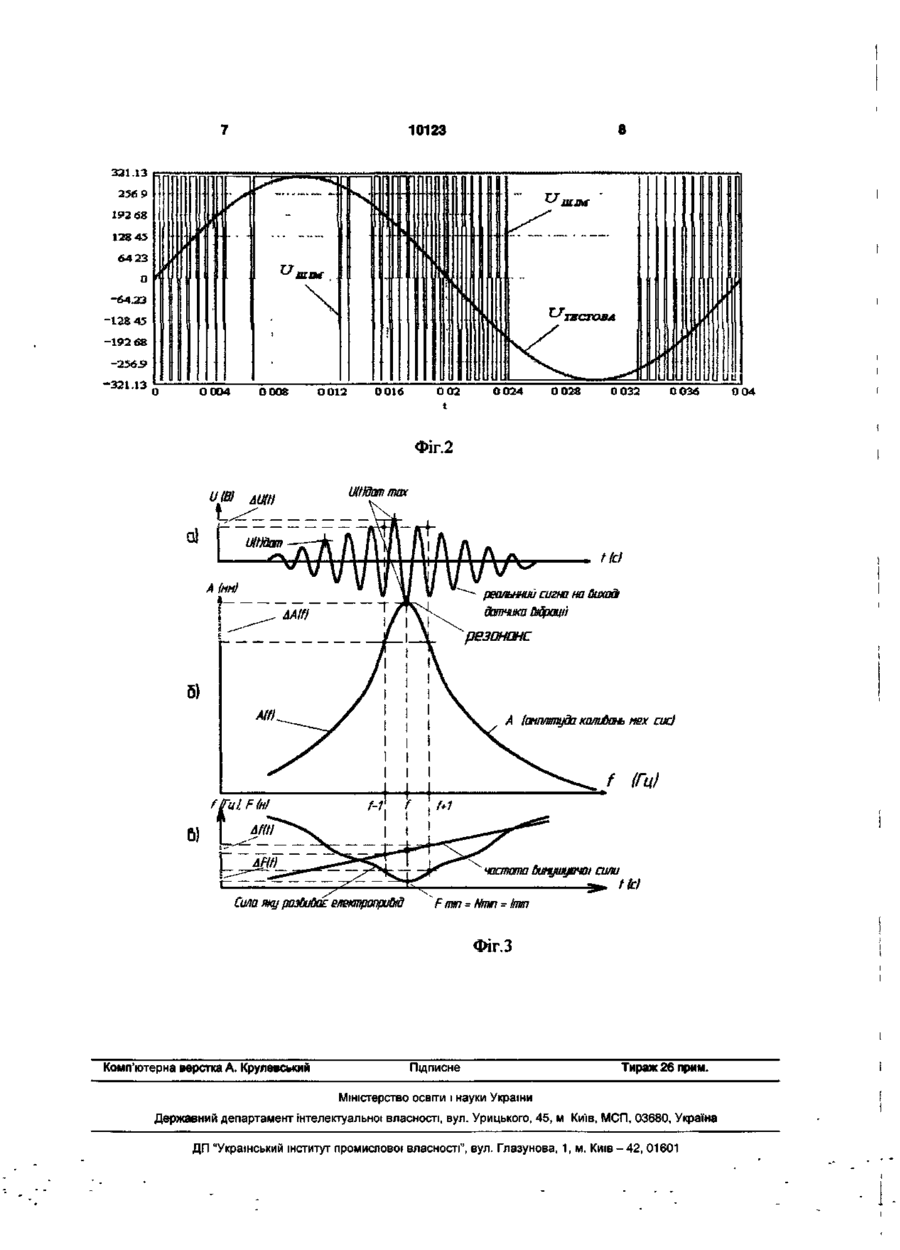
Пристрій для керування електромагнітним віброприводом, що включає коливну масу (робо чий орган) із вібродатчиком, встановлену на пружній системі, і електромагнітний вібратор, з'єднаний із блоком керування, який відрізняється тим, що блок керування виконаний у вигляді промислового мікроконтролера із зашитою програмою корекції параметрів коливного руху та пов'язаний через інтерфейс із перетворювачем частоти з можливістю забезпечення живлення електромагнітного віброприводу широтно-імпульсно модульованою синусоїдальною напругою. Корисна модель відноситься до пристроїв для керування електромагнітним віброприводом машин із коливними рухами робочих органів і може знайти застосування в таких галузях як машинобудування та приладобудування, а також в гірничо-переробній промисловості. Відомий пристрій, в котрім синхронізований із мережею генератор пилоподібних імпульсів, дільник імпульсної послідовності, генератор запускаючих імпульсів, силовий тиристор підключено до блоку живлення, котрий підключено до дільника імпульсної послідовності і генератора запускаючи імпульсів, а дільник імпульсної послідовності виконано у вигляді тиристора, конденсатора, стабілітрона та змінного опору, з'єднаного через конденсатор із стабілітроном, підключеним до управляючого електроду тиристора, анод котрого з'єднано із катодом стабілітрона і конденсатором при чому вихід дільника імпульсної послідовності підключено до генератора пилоподібних імпульсів, а через генератор запускаючих імпульсів - до управляючого електроду силового тиристора [1]. Даний пристрій забезпечує фазо-імпульсне регулювання, із можливістю зміни цілочисельного значення коефіцієнту ділення випрямленої напруги, це дозволяє регулювати частоту роботи віброприводу. Недоліком даного пристрою є те, що він не може автоматично змінювати частоту роботи віброприводу при зміні маси завантаження. Найбільш близьким по технічній суті є спосіб підтримки коло резонансного режиму роботи жи вильника за рахунок відслідковування власної частоти коливань механічної системи [2], тобто проходить процес підсилення сигналу отриманого від датчика вібрації двома підсилювачами, та вихідний силовий сигнал подається на електромагніт вібромашини. Цей пристрій дозволяє здійснювати автоматичну піднастройку частоти вимушуючої сили яка близька до резонансної частоти механічної системи. Але і цей пристрій має недоліки. Основним із них є: а) Дана система керування не є повністю автоматична, вона вимагає підчас записку участь людини для пошуку резонансної частоти механічної системи, після знаходження резонансної частоти вимагає переключення системи керування у слідкуючий режим. б) Сигнал який ми отримуємо із датчика вібрації, буде містити крім основної гармоніки, що рівна резонансній частоті механічної системи, ще й додаткові паразитні гармоніки, які обумовлені ударами деталей, що транспортуються об корпус. Тому після підсилення двома підсилювачами із врахуванням того, що кожний підсилювач має свій коефіцієнт нелінійних спотворень можна із впевненістю сказати, що часто та вимушуючої сили не буде точно дорівнювати резонансній частоті механічної системи. в) Також згідно [3] збільшення приведеної маси приводить до зменшення частоти резонансу механічної системи. Дана система керування про (22)16.03.2005 CO CM О) 10123 321.13 256 9 192 68 1. .. 1 ^ — • і 128 45 1 ! 1t г і 64 23 О V • f h t f Uшал 1)1 : Ч -64.23 -L28 4S 1 ' \ IT °ТЕСТОВА ,> -192 68 -256 S » '321 13 ^>--,.,,—-*^ 0 004 0 008 0.012 0 016 0 02 t 0 024 0.028 0 032 . . uuj 0 036 Фіг.2 лиш иШдшп max • tie) А (амплітуда коміюнь мех cud f (Гц) ttl Сила яку разбибоЕ елвтроприбід F тю » Nmm - Ітт Фіг. З Комп'ютерна верстка А. Крулевський Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. Київ-42, 01601 004 УКРАЇНА (19) UA (11)10123 аз) U (5i)7B65G27/24 МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ДЕРЖАВНИЙ ДЕПАРТАМЕНТ ІНТЕЛЕКТУАЛЬНОЇ ВЛАСНОСТІ ОПИС ДО ДЕКЛАРАЦІЙНОГО ПАТЕНТУ НА КОРИСНУ МОДЕЛЬ видається під відповідальність власника патенту (54) ПРИСТРІЙ ДЛЯ КЕРУВАННЯ ЕЛЕКТРОМАГНІТНИМ ВІБРОПРИВОДОМ (21)а200502377 (22)16.03.2005 (24)15.11.2005 (46) 15.11.2005, Бюл. № 1 1 , 2005 р. (72) Берник Павло Степанович, Чубик Роман Васильович, Пашистий Вадим Ананієвич (73) ВІННИЦЬКИЙ ДЕРЖАВНИЙ АГРАРНИЙ УНІВЕРСИТЕТ (57) Пристрій для керування електромагнітним віброприводом, що включає коливну масу (робо чий орган) із вібродатчиком, встановлену на пружній системі, і електромагнітний вібратор, з'єднаний із блоком керування, який відрізняється тим, що блок керування виконаний у вигляді промислового мікроконтролера із зашитою програмою корекції параметрів коливного руху та пов'язаний через інтерфейс із перетворювачем частоти з можливістю забезпечення живлення електромагнітного віброприводу широтно-імпульсно модульованою синусоїдальною напругою. Корисна модель відноситься до пристроїв для керування електромагнітним віброприводом машин із коливними рухами робочих органів і може знайти застосування в таких галузях як машинобудування та приладобудування, а також в гірничо-переробній промисловості. Відомий пристрій, в котрім синхронізований із мережею генератор пилоподібних імпульсів, дільник імпульсної послідовності, генератор запускаючих імпульсів, силовий тиристор підключено до блоку живлення, котрий підключено до дільника імпульсної послідовності і генератора запускаючи імпульсів, а дільник імпульсної послідовності виконано у вигляді тиристора, конденсатора, стабілітрона та змінного опору, з'єднаного через конденсатор із стабілітроном, підключеним до управляючого електроду тиристора, анод котрого з'єднано із катодом стабілітрона і конденсатором при чому вихід дільника імпульсної послідовності підключено до генератора пилоподібних імпульсів, а через генератор запускаючих імпульсів - до управляючого електроду силового тиристора [1]. Даний пристрій забезпечує фазо-імпульсне регулювання, із можливістю зміни цілочисельного значення коефіцієнту ділення випрямленої напруги, це дозволяє регулювати частоту роботи віброприводу. Недоліком даного пристрою є те, що він не може автоматично змінювати частоту роботи віброприводу при зміні маси завантаження. Найбільш близьким по технічній суті є спосіб підтримки коло резонансного режиму роботи жи вильника за рахунок відслідковування власної частоти коливань механічної системи [2], тобто проходить процес підсилення сигналу отриманого від датчика вібрації двома підсилювачами, та вихідний силовий сигнал подається на електромагніт вібромашини. Цей пристрій дозволяє здійснювати автоматичну піднастройку частоти вимушуючої' сили яка близька до резонансної частоти механічної системи. Але і цей пристрій має недоліки. Основним із них є: а) Дана система керування не є повністю автоматична, вона вимагає підчас записку участь людини для пошуку резонансної частоти механічної системи, після знаходження резонансної' частоти вимагає переключення системи керування у слідкуючий режим. б) Сигнал який ми отримуємо із датчика вібрації', буде містити крім основної гармоніки, що рівна резонансній частоті механічної системи, ще й додаткові паразитні гармоніки, які обумовлені ударами деталей, що транспортуються об корпус. Тому після підсилення двома підсилювачами із врахуванням того, що кожний підсилювач має свій коефіцієнт нелінійних спотворень можна із впевненістю сказати, що часто та вимушуючої сили не буде точно дорівнювати резонансній частоті механічної" системи. в) Також згідно [3] збільшення приведеної маси приводить до зменшення частоти резонансу механічної системи. Дана система керування про CO CM 10123 веде зміну частоти з певною точністю завдяки датчику вібрації, але для того щоб амплітуда коливань системи, тепер уже із більшою масою, на новій резонансній частоті залишилася не змінною необхідно проводити автоматичну корекцію амплітуди вимушуючої сили, а дана система керування не може проводити автоматичне регулювання амплітуди вимушуючої сили. Метою корисної моделі є розширення функціональних можливостей машин із коливними рухами робочих органів, та економія електроенергії яка витрачається на їх привід. Поставлена мета досягається тим, що в пристрої для керування електромагнітним віброприводом машини із коливними рухами робочих органів, який включає коливну масу (робочий орган) із вібродатчиком встановлену на пружній системі і електромагнітний вібратор, з'єднаний із блоком керування, згідно корисної моделі, блок керування виконаний у вигляді промислового мікроконтролера із зашитою програмою корекції параметрів коливного руху і пов'язаний через інтерфейс із перетворювачем частоти, який забезпечує живлення електромагнітного віброприводу широтноімпульсно модульованою напругою. Така конструкція системи керування дозволяє повністю автоматизувати процес керування роботою машини із коливними рухами робочих органів, за рахунок регулювання одночасно двома параметрами - частотою та амплітудою, що дозволяє забезпечити оптимальні режими роботи при мінімальних затратах енергії на вібропривід при роботі в двох основних режимах роботи: а) режим максимальної швидкості вібротранспортування або максимальної інтенсивності віброобробки при різних масах завантаження б) режим коли для умов технологічного процесу необхідно стабільність таких параметрів як: продуктивність вібромашини, швидкість вібротранспортування, інтенсивності віброобробки незалежно від маси завантаження резонансної вібромашини. Даний пристрій зводить до мінімуму перехідні процеси при зміні маси завантаження або зміні режиму роботи (параметрів технологічного процесу). Також виникає можливість звести до мінімуму час на налагодження та переналагодження системи при переході на інший технологічний процес завдяки тому, що витрачається час лише на корекцію або заміну програмного забезпечення промислового мікроконтролера. Пристрій відрізняється тим, що програма корекції параметрів коливного руху розроблена із врахуванням жорсткості пружної підвіски конкретної машини і діапазону зміни навантажень в процесі роботи, що забезпечує автоматизацію процесу керування роботою кожної конкретної машини. Пристрій відрізняється тим, що для живлення електромагніту приводу вібромашини використано широтно-імпульсно модульовану синусоїдальну напругу, що дозволяє отримувати синусоїдальну напругу необхідної частоти та великої потужності, На Фіг.1 зображений пристрій для керування роботою машини із коливними рухами робочих органів, на прикладі роботи вібролотка. Вібролоток 1 із якорем 2 закріпленим до рами 3 плоскими пружинами 4. На рамі 3 із зазором відносно якоря 2 закріплений електромагніт 5. Датчик вібрації 6 закріплений на лотку 1 і електрино з'єднаний із блоком керування, який складається із мікроконтролера 7 і перетворювача частоти 8, силовий вихід якого з'єднаний із електромагнітом 5. Принцип роботи пристрою наступний: коливання механічної системи 9 перетворюються датчиком вібрації в електричні коливання U(t) flaT (Фіг.З). Електричні коливання несуть інформацію про амплітуду коливань механічної системи та про її частоту. Ця інформація поступає на аналоговий вхід промислового мікроконтролера 2, де проводиться оцифровування аналогового сигналу тобто перетворення його в цифровий код [6]. В промисловім мікроконтролері 2 проходить сканування інформації із датчика вібрації [5] 6 на протязі певного часу, далі отриманий масив даних проходить цифрову фільтрацію (для того, щоб позбутися шумів та паразитних складових оцифрованого сигналу). Після чого проводиться аналіз амплітуди та частоти із використанням програми корекції параметрів коливного руху. Якщо амплітуда оцифрованого сигналу відрізняється від заданої оператором (користувачем) то мікроконтролер 2, використовуючи програму керування, спілкується по стандартному промисловому інтерфейсу із перетворювачем частоти 3, віддасть йому команду, збільшити або зменшити амплітуду широтно-імпульсно модульованої напруги ІІшім [4] Фіг.2 на його виході, залежно від того наскільки і в яку сторону змінилася амплітуда реального сигналу від заданої. Алгоритм корекції частоти вимушуючої сили дещо складніший за алгоритм корекції амплітуди. На Фіг.З, в) показано залежність між частотою вимушуючої сили f, та силою F яку розвиває електромагнітний вібропривід, та відповідну їм зміну амплітуди коливань робочого органу механічної системи А (Фіг.З, б), також зв'язок із амплітудою коливань U(t) електричних сигналів на виході датчика 6 Фіг.З, а) (якщо вона не двополярна (як показано), а однополярна то все рівно амплітуда синусоїди на виході датчика зростає із наближенням до резонансу, та спадає при відходжені від резонансу. Причому частота синусоїди на виході датчика 6 завжди близька по значенню до частоти коливань механічної системи ). Як видно із Фіг.З в) сила F, яку витрачає електромагнітний вібропривід із наближенням до резонансу падає за рахунок цього виникає ефект енергозбереження. На Фіг.З в) показано як завдяки зміні частоти вимушуючої сили на проміжку df(t) міняється сила F яку витрачає електромагнітний вібропривід, відповідно до зміни частоти вимушуючої сили на проміжку df(t) показано зміну амплітуди коливань механічної системи dA Фіг.З б) та відповідну їй зміну амплітуди та частоти сигналу dU(t) Фіг.З а) на виході датчика вібрацій. Згідно [3] збільшення приведеної маси приводить до зменшення частоти резонансу механічної системи 9 та зміну амплітуди в ту чи іншу сторону в залежності від параметрів відстройки механічної системи, тому мікропроцесор 2 після того як зафі 10123 ксує зміну амплітуди коливань механічної системи 4 яка викликана зміною маси завантаження, повинен провести порівняння між теперішньою частотою та попередньою. І в залежності від результатів порівняння повинен проводити корекцію частоти вимушуючої сили в цю сторону, в котру пройшла зміна частоти резонансу механічної системи. Тобто мікроконтролер постійно повинен вирівнювати два значення - це частота вимушуючої сили та частота власних коливань механічної системи. Промисловий мікроконтролер повинен працювати цілий час в циклічному режимі, тобто: сканування вхідного сигналу, аналіз інформації, приймання рішення, команда про його виконання. Завдяки виконанню вище приведених операцій механічна система буде завжди знаходитися в стані близькому до резонансного незалежно від маси завантаження, причому буде постійно підтримуватися необхідна амплітуда коливань на колорезонансній частоті при мінімальних затратах енергії на привід вібромашини. Література: 1. Авторське свідоцтво СССР №967914 кл., B65G 27/24, 1982. 2. Авторське свідоцтво СССР №776961 кл., B65G 27/24, 1980. 3. Э.Э. Лавендал. Вибрации в технике: Справ, в 6 т. - М.: Машиностроение, 1981. - Т.4: Вибрационные процессы и машины. - 510 с. 4. О.П. Михайлов Автоматизированный электропривод станков и промышленных роботов: Учебник для вузов. - М.: Машиностроение. 1990. - 304 ст. 5. С.А. Добрынин, М.С. Фельдман, Г.И. Фирсов Методы автоматизированного исследования вибрации машин. Москва, «МАШИНОСТРОЕНИЕ», 1987,-225 ст. 6. Сергиенко А.Б., Цифровая обработка сигналов. "Питер" 2003. - 603 ст. 10123 321.13 N 256 9 192 68 и 128 45 64 23 и вгоа О -64.23 L7ТЕСТОВА -12S 45 -192 68 -256 Э -321.13 0 004 0 008 0 012 0 016 0 02 t 0 024 0 028 0 032 0 036 Фіг.2 и а лиш UWdam max А іоіппітуда калиЬпнь мех cud f (Гц) час/пата бимушуючої сили Сила яку розбибає еттрапри&д Fmin = Nmm - Imm Фіг. З Комп'ютерна верстка А. Крулевський Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. Київ-42, 01601 uu 0 04
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of electromagnetic vibration drive
Автори англійськоюBernyk Pavlo Stepanovych, Chubyk Roman Vasyliovych
Назва патенту російськоюУстройство для управления электромагнитным виброприводом
Автори російськоюБерник Павел Степанович, Чубик Роман Васильевич
МПК / Мітки
МПК: B65G 27/10
Мітки: пристрій, керування, електромагнітним, віброприводом
Код посилання
<a href="https://ua.patents.su/8-10123-pristrijj-dlya-keruvannya-elektromagnitnim-vibroprivodom.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування електромагнітним віброприводом</a>
Пристрій керування віброприводом
Номер патенту: 36611
Опубліковано: 16.04.2001
Автор: Шаповалов Михайло Якович
МПК: B06B 1/02
Мітки: керування, віброприводом, пристрій
Формула / Реферат:
Пристрій керування віброприводом, що вміщує електромагніт, датчик вібрації, підключений до входу амплітудного детектора, вихід якого підключений до входу блока підсумовування, на вхід якого підключений задатчик амплітуди, підсилювач, вихід якого підключений до входу комутуючого елемента, а останній підключений до одного з виводів електромагніта, а другий вивід електромагніта з'єднаний з джерелом живлення, який відрізняється тим, що введено...
Багатовхідний пристрій керування автоматичним вмиканням і вимиканням навантаження

Номер патенту: 62041
Опубліковано: 15.12.2003
Автор: Семенюк Віктор Володимирович
МПК: H05B 39/00
Мітки: керування, вмиканням, вимиканням, пристрій, автоматичним, багатовхідний, навантаження
Формула / Реферат:
Багатовхідний пристрій керування автоматичним вмиканням і вимиканням навантаження, який складається з випромінювачів, з'єднаних з приймачами, який відрізняється тим, що пристрій оснащений шиною електричного зв'язку, з’єднаною з інтерфейсним портом приймача та інтерфейсним портом випромінювача коливань, шиною потужного електричного зв'язку, з’єднаною з інтерфейсним портом навантаження і відповідно з мікропроцесорною системою керування.
Пристрій аварійного ввімкнення вакуумного вимикача типу вмв-10 з електромагнітним приводом
Номер патенту: 2113
Опубліковано: 17.11.2003
Автори: Скибінський Ростислав Іванович, Борейко Володимир Іванович
МПК: H01H 33/66, H01H 33/00
Мітки: вакуумного, типу, електромагнітним, аварійного, пристрій, приводом, вмв-10, вимикача, ввімкнення
Формула / Реферат:
Пристрій аварійного ввімкнення вакуумного вимикача з електромагнітним приводом, що містить пружину з пружинотримачем, який зв'язаний з кулачками, розміщеними на валах кривошипа, до яких за допомогою скоби приєднані важелі, з'єднані ручкою, при повороті якої вони своїм зубом повертають вал до заходження пружинотримача за мертву точку і стикання його з заскочкою, для звільнення якої необхідно натиснути на шток, який повертає заскочку, даючи...
Пристрій для дистанційного керування і контролю захисту
Номер патенту: 39283
Опубліковано: 15.08.2002
Автори: Мезніков Артур Володимирович, Ведерніков Олександр Іванович, Стаднік Микола Іванович
МПК: G08C 19/16
Мітки: пристрій, керування, контролю, дистанційного, захисту
Формула / Реферат:
Пристрій для дистанційного керування і контролю захисту, що містить в собі джерело змінного струму, двопровідну лінію зв'язку, селектор імпульсів, включений між згаданими джерелом і лінією зв'язку, який відрізняється тим, що в нього додатково введений і підключений між проводами лінії зв'язку принаймні один однополярний формувач імпульсів струму, до якого підключений елемент керування, включений між входом керування однополярного формувача...
Прилад для фізіотерапії низькоінтенсивним електромагнітним випромінюванням
Номер патенту: 569
Опубліковано: 15.09.2000
Автори: Самосюк Іван Захарович, Чухраєва Олена Миколаївна, Писанко Олег Іванович, Самосюк Наталія Іванівна, Чухраєв Микола Вікторович
МПК: A61N 5/00, A61H 39/00
Мітки: електромагнітним, випромінюванням, прилад, низькоінтенсивним, фізіотерапії
Формула / Реферат:
Прилад для фізіотерапії низькоінтенсивним електромагнітним випромінюванням (ЕМВ), що містить субблоки живлення, контролю, керування і модулятор, об'єднані у блок живлення, контролю, керування і модуляції (ЖКК), та з'єднаний з блоком ЖКК випромінювач електромагнітних хвиль (ЕМХ) портативний міліметрових хвиль, обладнаний випромінювачем-антеною, який відрізняється тим, що блок ЖКК доповнений таймером на два діапазони часу процедур на 1-99 с та...
Попередній патент: Верхній вузол струмоприймача
Наступний патент: Віброоброблюючий пристрій резонансного типу з дебалансним віброприводом
Випадковий патент: Твердий носій соляної кислоти в неактивній формі