Спосіб дискретного управління електромагнітним підшипником
Номер патенту: 39844
Опубліковано: 15.06.2001
Автори: Розов Володимир Юрійович, Ільюхін Василь Іванович, Коваленко Іван Тихонович, Машньов Анатолій Єгорович
Формула / Реферат
Спосіб дискретного управління електромагнітним підшипником, який заключається в тому, що при зміщенні валу в котушки електромагнітів вводять дискретно струм, значення якого не залежить від величини зміщення, а крутість фронту обмежена тільки сталою часу котушки електромагніту і джерела живлення, який відрізняється тим, що додатково вводиться режим переміщення валу по інерції при вилучених протилежних електромагнітах, а зона регулювання поділена вздовж осі протилежних електромагнітів датчиками положення валу на k зон регулювання.
Текст
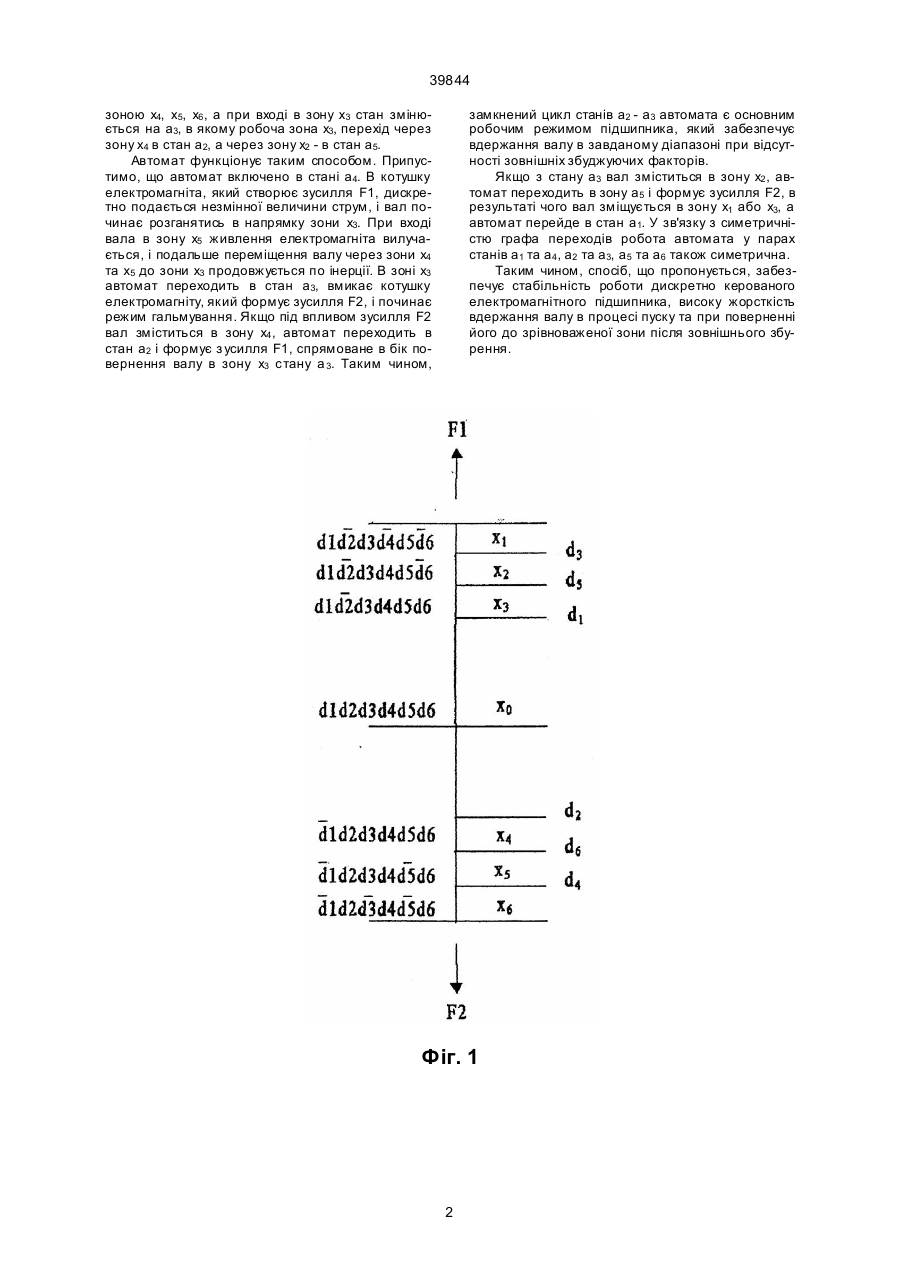
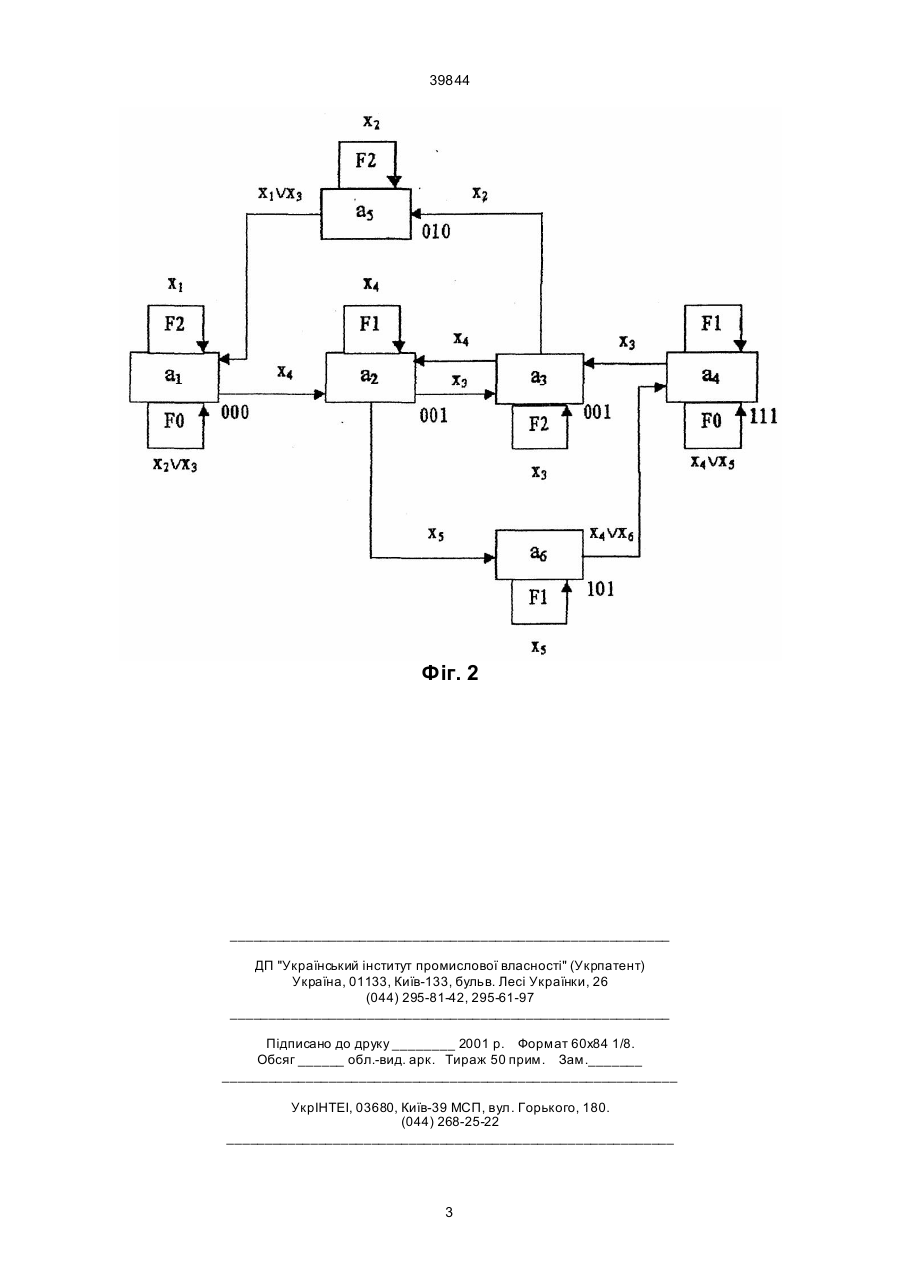
Спосіб дискретного управління електромагнітним підшипником, який полягає в тому, що при зміщенні валу в котушки електромагнітів вводять 39844 зоною х4, х5, х6 , а при вході в зону х3 стан змінюється на а3, в якому робоча зона х3, перехід через зону х4 в стан а 2, а через зону х2 - в стан а 5. Автомат функціонує таким способом. Припустимо, що автомат включено в стані а 4. В котушку електромагніта, який створює зусилля F1, дискретно подається незмінної величини струм, і вал починає розганятись в напрямку зони x3. При вході вала в зону х5 живлення електромагніта вилучається, і подальше переміщення валу через зони x4 та х5 до зони x3 продовжується по інерції. В зоні x3 автомат переходить в стан а 3, вмикає котушку електромагніту, який формує зусилля F2, і починає режим гальмування. Якщо під впливом зусилля F2 вал зміститься в зону x4 , автомат переходить в стан а2 і формує з усилля F1, спрямоване в бік повернення валу в зону x3 стану а 3. Таким чином, замкнений цикл станів а2 - а3 автомата є основним робочим режимом підшипника, який забезпечує вдержання валу в завданому діапазоні при відсутності зовнішніх збуджуючих факторів. Якщо з стану а3 вал зміститься в зону х2 , автомат переходить в зону а 5 і формує зусилля F2, в результаті чого вал зміщується в зону x1 або x3, а автомат перейде в стан а 1. У зв'язку з симетричністю графа переходів робота автомата у парах станів а 1 та а4 , а2 та а3, а5 та а6 також симетрична. Таким чином, спосіб, що пропонується, забезпечує стабільність роботи дискретно керованого електромагнітного підшипника, високу жорсткість вдержання валу в процесі пуску та при поверненні його до зрівноваженої зони після зовнішнього збурення. Фіг. 1 2 39844 Фіг. 2 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for discrete control of electromagnetic bearing
Автори англійськоюIliukhin Vasyl Ivanovych, Kovalenko Ivan Tykhonovych, Mashniov Anatolii Yegorovych, Rozov Volodymyr Yuriiovych
Назва патенту російськоюСпособ дискретного управления электромагнитным подшипником
Автори російськоюИльюхин Василий Иванович, Коваленко Иван Тихонович, Машнев Анатолий Егорович, Розов Владимир Юрьевич
МПК / Мітки
МПК: F16C 32/00
Мітки: підшипником, дискретного, електромагнітним, спосіб, управління
Код посилання
<a href="https://ua.patents.su/3-39844-sposib-diskretnogo-upravlinnya-elektromagnitnim-pidshipnikom.html" target="_blank" rel="follow" title="База патентів України">Спосіб дискретного управління електромагнітним підшипником</a>
Спосіб дискретного управління електромагнітним підшипником
Номер патенту: 23257
Опубліковано: 19.05.1998
Автори: Машньов Анатолій Єгорович, Петров Сергій Васильович, Ільюхін Василь Іванович, Заутнер Фелікс Леонідович, Розов Володимир Юрійович
МПК: F16C 32/04
Мітки: спосіб, електромагнітним, дискретного, підшипником, управління
Формула / Реферат:
Способ дискретного управления электромагнитным подшипником, заключающийся в том, что в катушки электромагнитов подают статические составляющие токов, уравновешивающие ротор при его расположении по оси подшипника, а при смещении вала агрегата формируют динамические составляющие токов так, чтобы суммарное воздействие статических и динамических токов было направлено в сторону уравновешивания вала, отличающийся тем. что динамическая составляющая...
Пристрій управління електромагнітним приводом для дистанційного управління автоматичним вимикачем
Номер патенту: 17758
Опубліковано: 20.05.1997
Автори: Дашков Андрій Георгійович, Гущін Владислав Якович, Костюк Володимир Андрійович
МПК: H01F 7/06, H01H 47/00
Мітки: приводом, дистанційного, управління, пристрій, вимикачем, електромагнітним, автоматичним
Формула / Реферат:
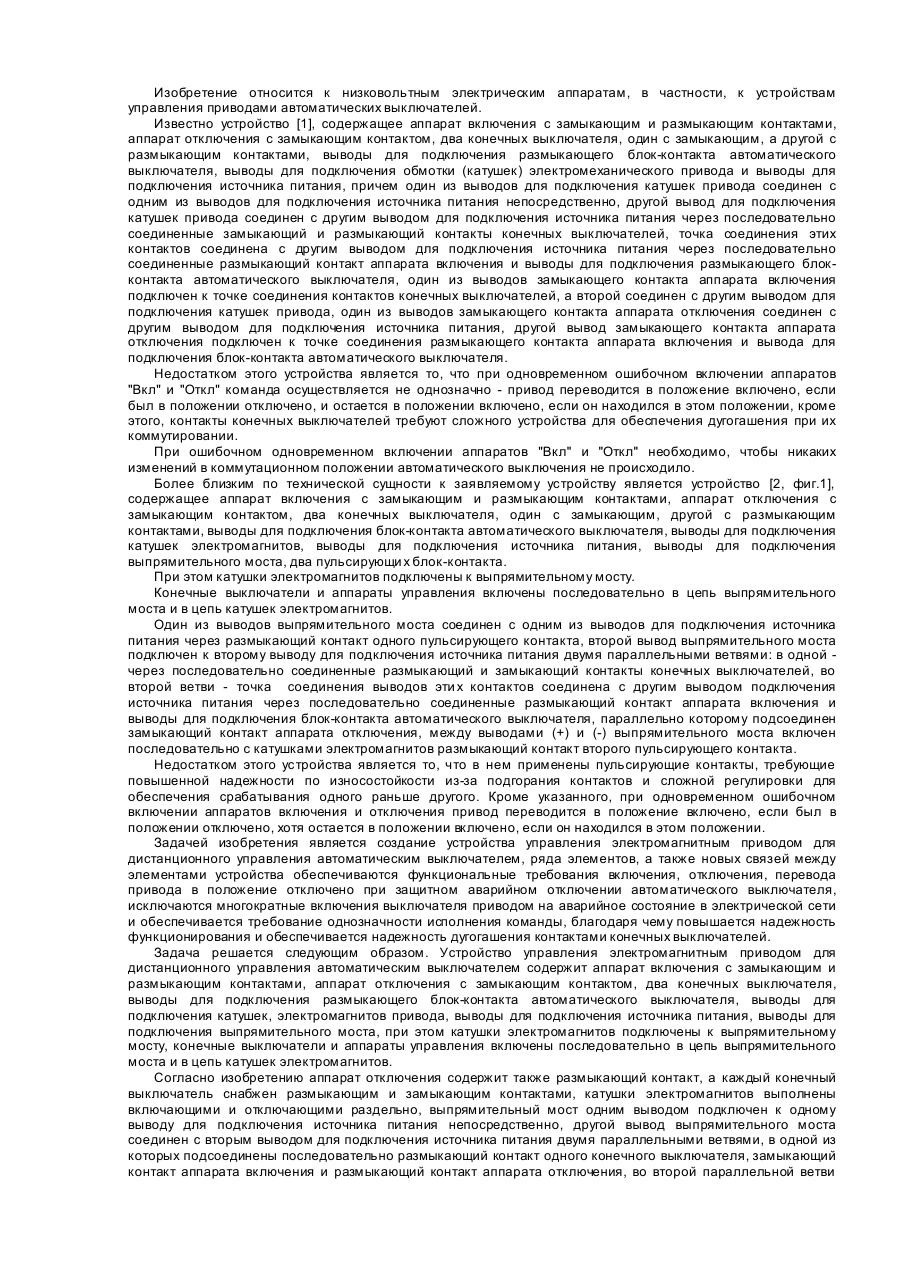
Устройство управления электромагнитным приводом для дистанционного управления автоматическим выключателем, содержащее аппарат включения с замыкающим и размыкающим контактами, аппарат отключения с замыкающим контактом, два конечных выключателя, выводы для подключения размыкающего блок-контакта автоматического выключателя, выводы для подключения катушек электромагнитов привода, выводы для подключения источника питания, выводы для подключения...
Спосіб дискретного вимірювання тривалості електричних імпульсів
Номер патенту: 11376
Опубліковано: 25.12.1996
Автор: Дем'янчук Тарас Михайлович
МПК: G01R 29/02
Мітки: дискретного, електричних, імпульсів, спосіб, тривалості, вимірювання
Формула / Реферат:
Способ дискретного измерения длительности электрических импульсов, заключающийся в том, что измеряемым импульсом управляют началом и окончанием подсчета сигналов, поступающих через равные, заранее заданные промежутки времени, а значение длительности определяют путем умножения числа подсчитанных сигналов на длительность одного промежутка времени, отличающийся тем, что, с целью повышения экономичности, в качестве подсчитываемых импульсов...
Спосіб дискретного контролю місцезнаходження в лаві виконавчого органу стругу та пристрій для його здійснення
Номер патенту: 7689
Опубліковано: 26.12.1995
Автори: Кібрик Ісаак Соломонович, Барданов Валерій Олександрович, Торубалко Тарас Григорович
МПК: E21C 35/24
Мітки: спосіб, виконавчого, дискретного, контролю, пристрій, стругу, місцезнаходження, здійснення, лави, органу
Формула / Реферат:
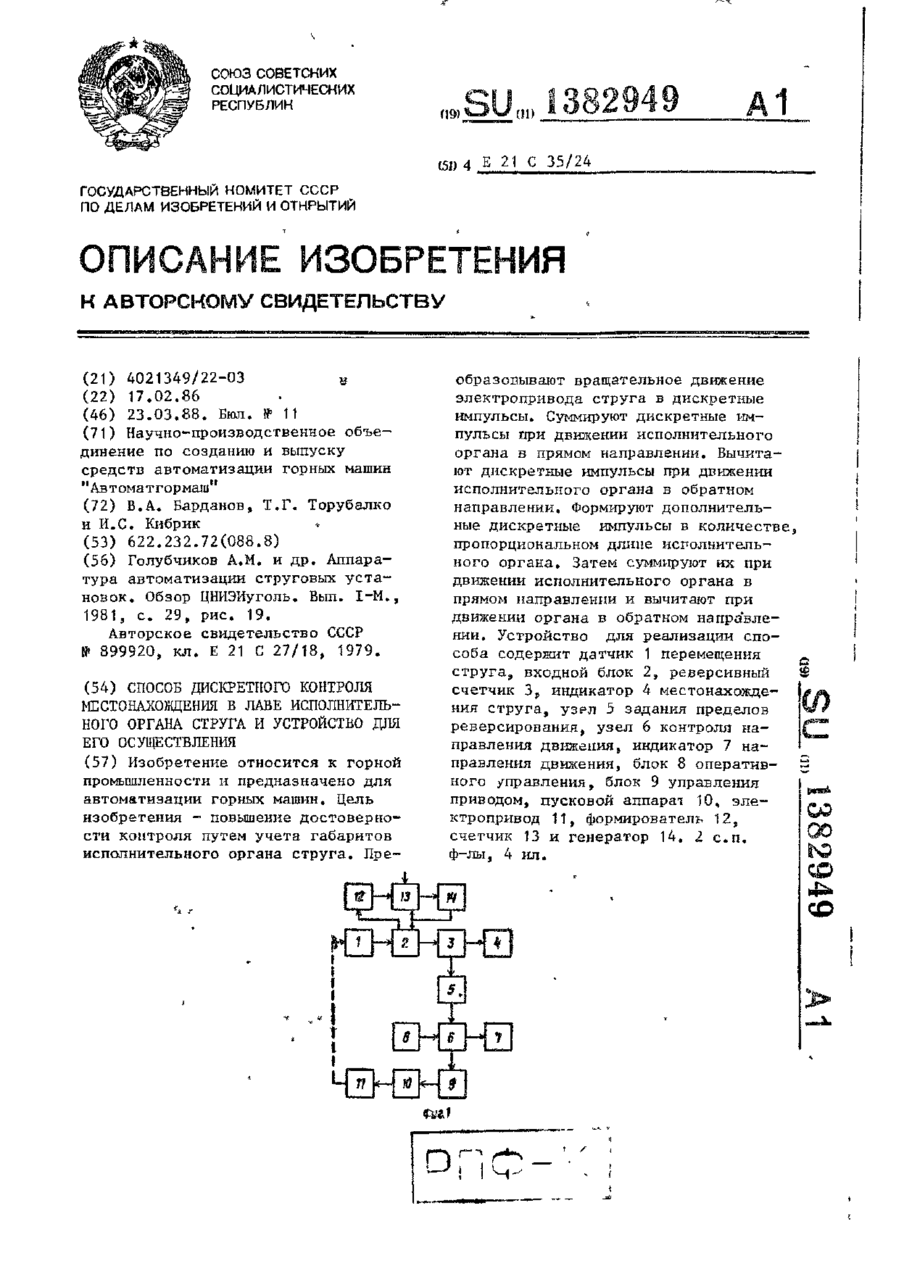
1. Способ дискретного контроля местонахождения в лаве исполнительного органа струга, заключающийся в преобразовании вращательного движения электропривода струга в дискретные импульсы, суммировании дискретных импульсов при движении исполнительного органа в прямом направлении и вычитании дискретных импульсов при движении исполнительного органа в обратном направлении, отличающийся тем, что, с целью повышения достоверности контроля путем...
Пристрій для дискретного випаровування матеріалів в вакуумі
Номер патенту: 8142
Опубліковано: 26.12.1995
Автори: Колінько Сергій Олексійович, Баран Микола Юрійович, Фірцак Юрій Юрійович, Іваницький Валентин Петрович
МПК: C23C 14/26
Мітки: вакуумі, випаровування, пристрій, дискретного, матеріалів
Формула / Реферат:
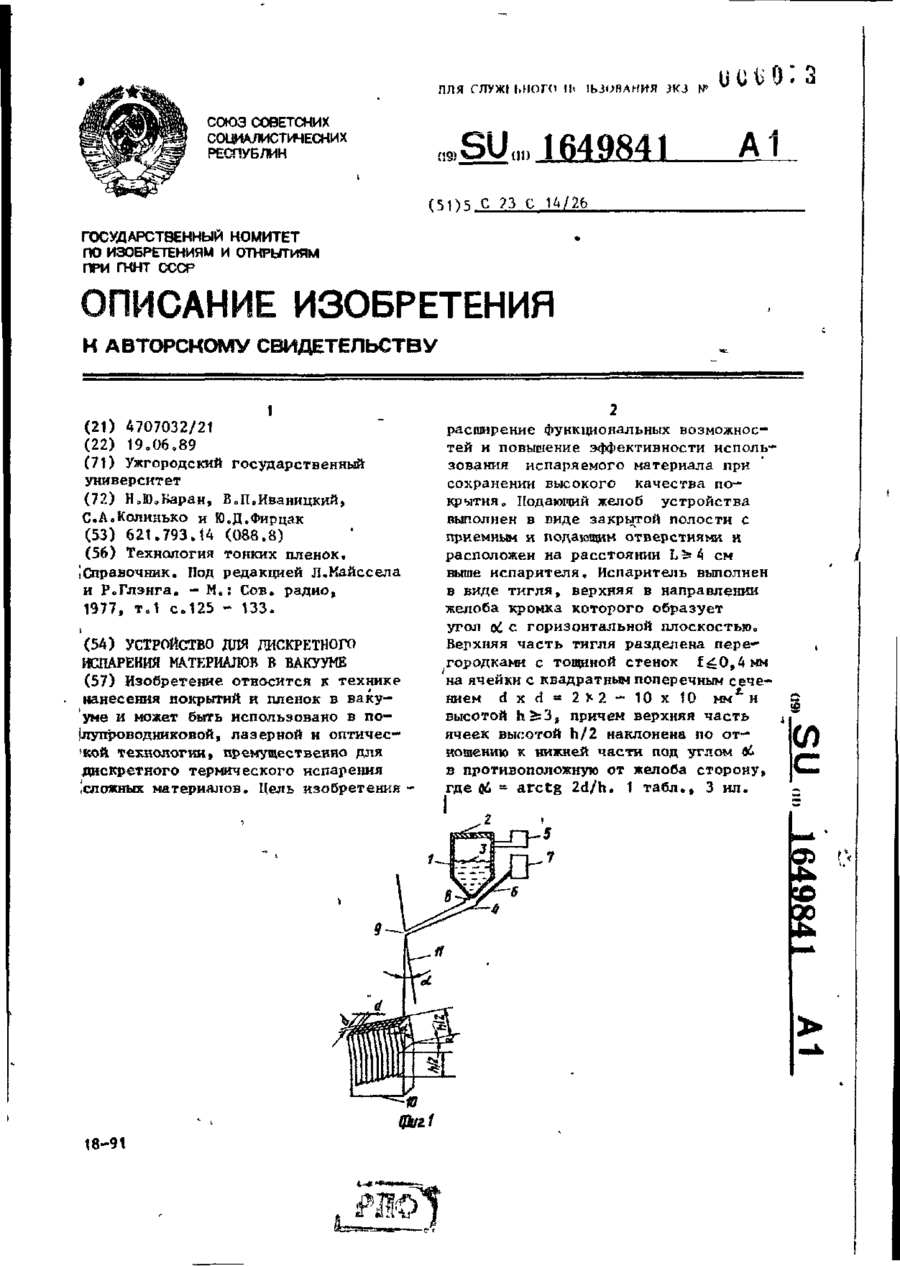
Устройство для дискретного испарения материалов в вакууме, содержащее испаритель, дозатор испаряемого материала и закрытый виброжелоб, расположенный между испарителем и дозатором, отличающееся тем, что, с целью расширения функциональных возможностей и повышения эффективности использования испаряемого материала при сохранении высокого качества наносимого покрытия, испаритель выполнен в виде тигля, верхняя поверхность которого в направлении...
Попередній патент: Головка циліндрів
Наступний патент: Стільниковий глушник шуму
Випадковий патент: Спосіб блокування насуву вагонів, які заборонені для розпуску або пропуску з гірки