Спосіб дискретного управління електромагнітним підшипником
Номер патенту: 23257
Опубліковано: 19.05.1998
Автори: Петров Сергій Васильович, Заутнер Фелікс Леонідович, Розов Володимир Юрійович, Машньов Анатолій Єгорович, Ільюхін Василь Іванович
Формула / Реферат
Способ дискретного управления электромагнитным подшипником, заключающийся в том, что в катушки электромагнитов подают статические составляющие токов, уравновешивающие ротор при его расположении по оси подшипника, а при смещении вала агрегата формируют динамические составляющие токов так, чтобы суммарное воздействие статических и динамических токов было направлено в сторону уравновешивания вала, отличающийся тем. что динамическая составляющая тока является дискретной величиной, не зависящей от величины смещения вала, крутизна фронта дискретной составляющей ограничена только постоянной времени катушки электромагнита и источника питания, причем дискретную составляющую тока суммируют со статической в катушке электромагнита, от которого вал удалился, и вычитают из тока катушки противорасположенного электромагнита, а при расположении вала по оси подшипника разрывают цепь питания дискретной составляющей тока.
Текст
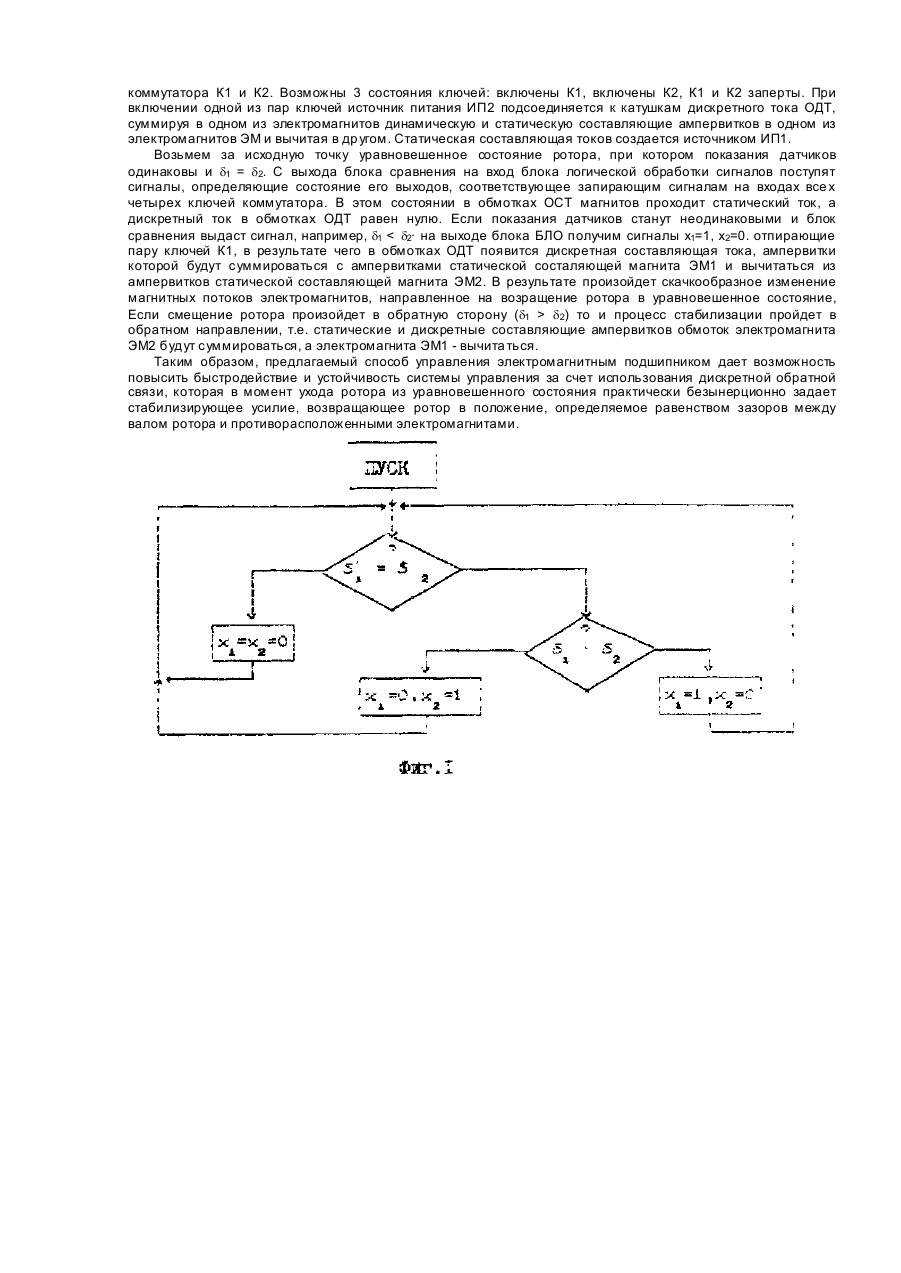
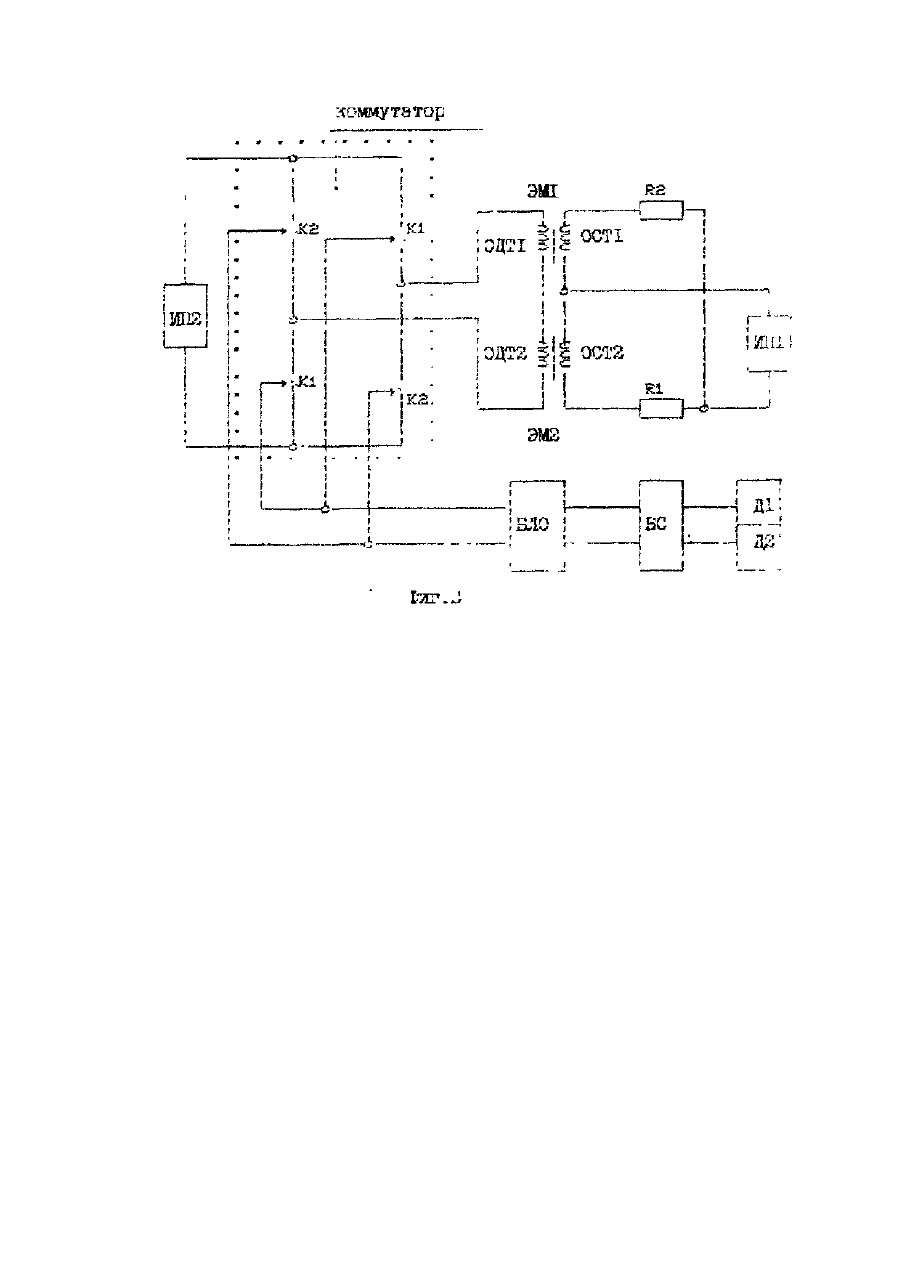
Предлагаемый способ относится к электротехнике, в частности, к системам бесконтактного удержания быстровращающихся роторов в магнитных подшипниках и может быть использован в энергетике, например, в газоперекачивающих агрегатах. Сложность удержания ротора электромагнитным подшипником в заданном диапазоне определяется, в основном, следующими условиями: - ограниченностью диапазона, в котором допустимо нахождение вала; - при выходе вала из равновесного состояния возмущающее усилие, создаваемое притягивающим электромагнитом, возрастает по мере движения вала обратно пропорционально квадрату расстояния от притягивающего магнита; - в это же время стабилизирующее усилие, создаваемое противорасположенным электромагнитом, уменьшается также в квадратичной зависимости от величины рассогласования. Поэтому система управления должна при минимальной величине смещения вала создать стабилизирующее усилие, которое обеспечит его торможение и возвращение в равновесное состояние, т.е. иметь высокую жесткость регулирования. Известны способы управления электромагнитными подшипниками, реализуемые устройствами, описанными в указанных источниках. Регулирование места расположения вала проводится путем отслеживания и отработки сигнала рассогласования между заданным и измеренным значением регулируемой величины В авт.св. СССР № 1739100, кл F16С32/04 предложено расширение линейного диапазона регулирования за счет введения специальных элементов, компенсирующи х нелинейности, что снижает Эффект квадратичной зависимости усилий электромагнитов от величины рассогласования. В авт.св. СССР № 1744313, кл. F 16 С 32/04 предложено использовать управляющие сигналы, пропорциональные величине отклонения ротора и скорости его перемещения, что дает возможность форсировать нарастание стабилизирующего воздействия при рассогласовании, приближающемся к предельно допустимому. Однако при малой величине рассогласования реакции системы управления недостаточна для жесткого воздействия на перемещение вала, которое обеспечило бы его торможение, поэтому ни один из рассмотренных способов не может обеспечить достаточно жесткую реакцию, необходимую для быстрого реагирования на малые отклонения вала. Целью предлагаемого изобретения является повышение надежности и стабильности работы магнитного подшипника за счет максимального воздействия на вал при его минимальном отклонении от заданного положения. Поставленная цель достигается тем, что в катушки электромагнитов подают статические составляющие токов, уравновешивающие ротор при его расположении по оси подшипника, а при смещении вала агрегата из равновесного состояния формируют динамические составляющие токов так, чтобы суммарное воздействие статических и динамических токов было направлено а сторону уравновешивания вала, причем динамическая составляющая тока является дискретной величиной, не зависящей от величины смещения вала, крутизна фронта дискретной составляющей ограничена только постоянной времени катушки электромагнита и источника питания, причем дискретную составляющую тока суммируют со статической в катушке электромагнита, от которого вал удалился, и вычитаюут из тока катушки противорасположенного электромагнита, а при расположении вала по оси подшипника разрывают цепь питания дискретной составляющей тока. Эффективность стабилизации вала при использовании предлагаемого способа повышается за счет независимости величины воздействия от степени рассогласования показаний датчиков положения вала, т.е. при минимальном рассогласовании обеспечивается максимальное воздействие регулирующих элементов (электромагнитов). На фиг 1 иллюстрирующей алгоритм предлагаемого способа управления, приняты следующие обозначения: d1 , d2 - показания первого и второго датчиков смещения, х1 , х2 - вы ходные сигналы системы управлениями соответствует сигналу, при котором формируется дискретная составляющая тока) Как следует из алгоритма, возможны три состояния системы управления. При равенстве сигналов датчиков (d1=d2) х1=х2=0 и в обмотки электромагнитов подают только статические токи, при d1>d2 x1=1, х2=0 дискретная составляющая действует в направлении одного из противорасположенных электромагнитов, при d1 d2) то и процесс стабилизации пройдет в обратном направлении, т.е. статические и дискретные составляющие ампервитков обмоток электромагнита ЭМ2 будут суммироваться, а электромагнита ЭМ1 - вычита ться. Таким образом, предлагаемый способ управления электромагнитным подшипником дает возможность повысить быстродействие и устойчивость системы управления за счет использования дискретной обратной связи, которая в момент ухода ротора из уравновешенного состояния практически безынерционно задает стабилизирующее усилие, возвращающее ротор в положение, определяемое равенством зазоров между валом ротора и противорасположенными электромагнитами.
ДивитисяДодаткова інформація
Автори англійськоюIliukhin Vasyl Ivanovych, Mashniov Anatolii Yegorovych, Rozov Volodymyr Yuriiovych
Автори російськоюИльюхин Василий Иванович, Машнев Анатолий Егорович, Розов Владимир Юрьевич
МПК / Мітки
МПК: F16C 32/04
Мітки: спосіб, підшипником, електромагнітним, дискретного, управління
Код посилання
<a href="https://ua.patents.su/3-23257-sposib-diskretnogo-upravlinnya-elektromagnitnim-pidshipnikom.html" target="_blank" rel="follow" title="База патентів України">Спосіб дискретного управління електромагнітним підшипником</a>
Пристрій управління електромагнітним приводом для дистанційного управління автоматичним вимикачем
Номер патенту: 17758
Опубліковано: 20.05.1997
Автори: Гущін Владислав Якович, Дашков Андрій Георгійович, Костюк Володимир Андрійович
МПК: H01H 47/00, H01F 7/06
Мітки: дистанційного, електромагнітним, автоматичним, вимикачем, управління, пристрій, приводом
Формула / Реферат:
Устройство управления электромагнитным приводом для дистанционного управления автоматическим выключателем, содержащее аппарат включения с замыкающим и размыкающим контактами, аппарат отключения с замыкающим контактом, два конечных выключателя, выводы для подключения размыкающего блок-контакта автоматического выключателя, выводы для подключения катушек электромагнитов привода, выводы для подключения источника питания, выводы для подключения...
Пристрій для управління мостовим інвертором
Номер патенту: 1827
Опубліковано: 20.12.1994
Автори: Ярославцев Михайло Іванович, Лукашенко Андрій Германович, Попов Віктор Іванович
Мітки: пристрій, управління, інвертором, мостовим
Формула / Реферат:
1. Устройство для управлення мостовым инвертором, содержащее последовательно соединенные источник задания тока, усилитель рассогласования токов, компаратор, а также первый и второй пороговые элементы, блок логического управления вентилями, обеспечивающий закорачивание нагрузки мостового инвертора при наличии логической единицы на обоих входах блока логического управления вентилями путем включения анодной или катодной группы вентилей, при...
Пристрій для управління трифазним двигуном змінного струму
Номер патенту: 3042
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/02
Мітки: змінного, управління, трифазним, пристрій, струму, двигуном
Формула / Реферат:
1. Устройство для управления трехфазным двигателем переменного, тока с соединенными в звезду фазными обмотками, содержащее трехфазный мостовой инвертор с силовыми входами и выходами, предназначенными соответственно для подключения к источнику напряжения и фазным обмоткам статора электродвигателя, измерители токов двух первых фаз, задатчики фазных токов, регуляторы фазных токов, подключенные первыми входами к выходам задатчиков фазных токов,...
Спосіб управління асинхронним електроприводом
Номер патенту: 20489
Опубліковано: 15.07.1997
Автор: Аркадьєв Віктор Юрьєвич
МПК: H02P 27/04
Мітки: спосіб, асинхронним, управління, електроприводом
Формула / Реферат:
Способ управления асинхронным электроприводом, при котором формируют мгновенные симметричные фазные напряжения на обмотках статора асинхронного двигателя с амплитудой, частотой и фазой, определяемыми по измеренной скорости и двум входным воздействиям, одно из которых постоянно и соответствует требуемой амплитуде потокосцепления ротора, а другое соответствует моменту, отличающийся тем, что устанавливают граничное значение частоты по...
Спосіб передачі та прийому команд управління по проводах трифазної мережі соколова в.ф.
Номер патенту: 1080
Опубліковано: 30.12.1993
Автор: Соколов Вячеслав Федорович
МПК: G08C 19/02
Мітки: спосіб, управління, мережі, проводах, трифазної, передачі, соколова, прийому, в.ф, команд
Формула / Реферат:
Ф о р м у л а и з о б р е т е н и я Способ передачи и приема команд управления по проводам трехфазной сети, основанный на формировании команды управления из сигнала заданной полуволны напряжения переменного тока в одном из фазных проводов трехфазной сети, передаче команды управления по одному из фазных проводов трехфазной сети, приеме команды управления и преобразовании ее в сигнал управления исполнительным элементом, о т л и ч а ю щ...
Попередній патент: Спосіб гастрокардіопексії
Наступний патент: Пристрій для збивання окалини з поверхні прокату
Випадковий патент: Спосіб одержання комплексного антибіотика циклоспоріну та/або його компонентів та штам грибка tolypocladium varium