Пристрій для математичного моделювання стопи ноги
Формула / Реферат
1. Устройство для математического моделирования стопы ноги, содержащее основание с опорной платформой и стойками, оптическую систему с плоскими зеркалами и излучателем, блок записи результатов измерения, отличающееся тем, что, с целью сокращения времени процесса моделирования, оно дополнительно содержит модулятор, измерительную панель, установленную с возможностью поступательного перемещения по расположенной на основании направляющей, ходовой винт со счетчиком оборотов, установленный на основании с возможностью вращения и механически связанным с измерительной панелью, на торцах которой вдоль оси ходового винта укреплены излучатель с дополнительно введенной фокусирующей линзой и модулятор, опорная платформа выполнена с поперечными прорезями, расположенными вдоль плоскости развертки светового луча, и установлена на стойках основания, несущих
Текст
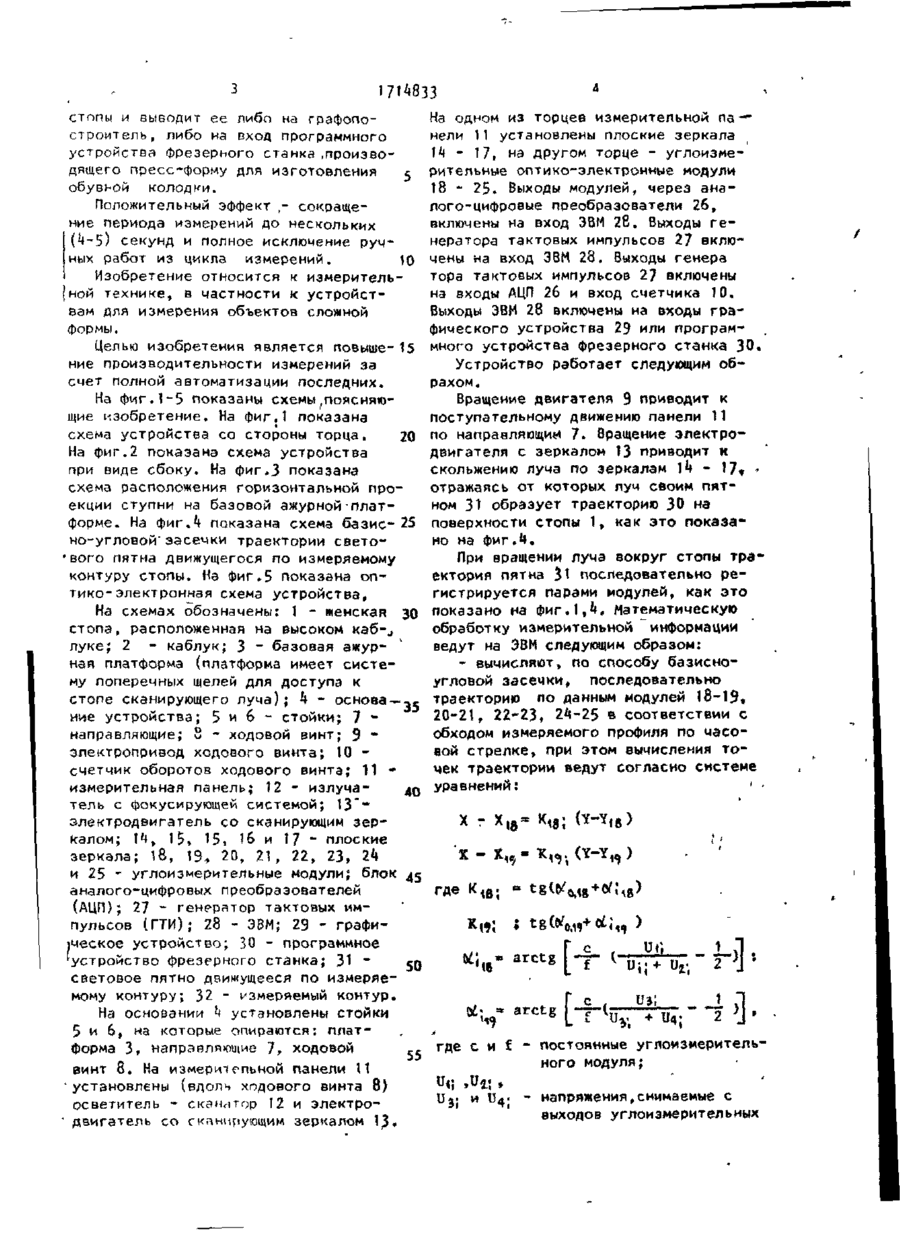
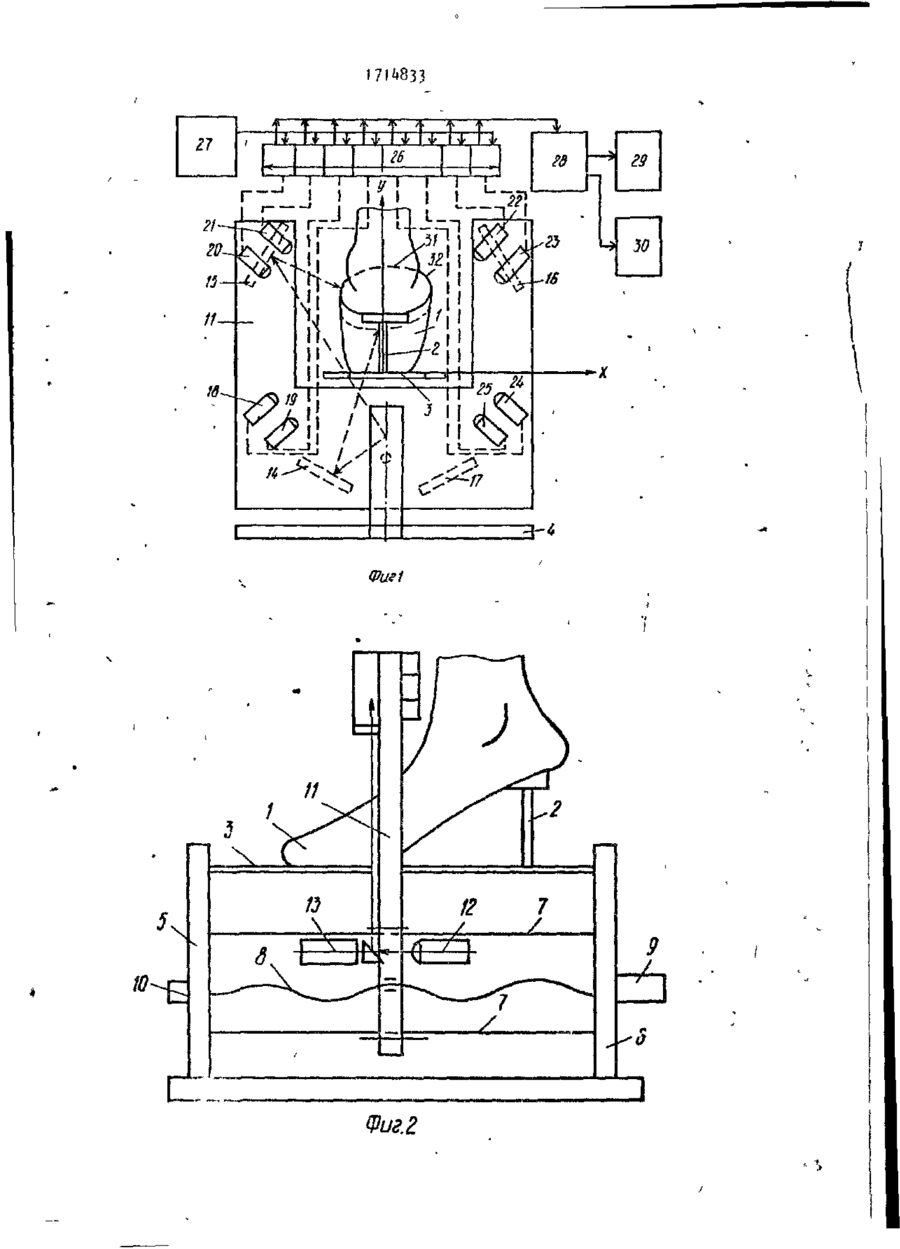
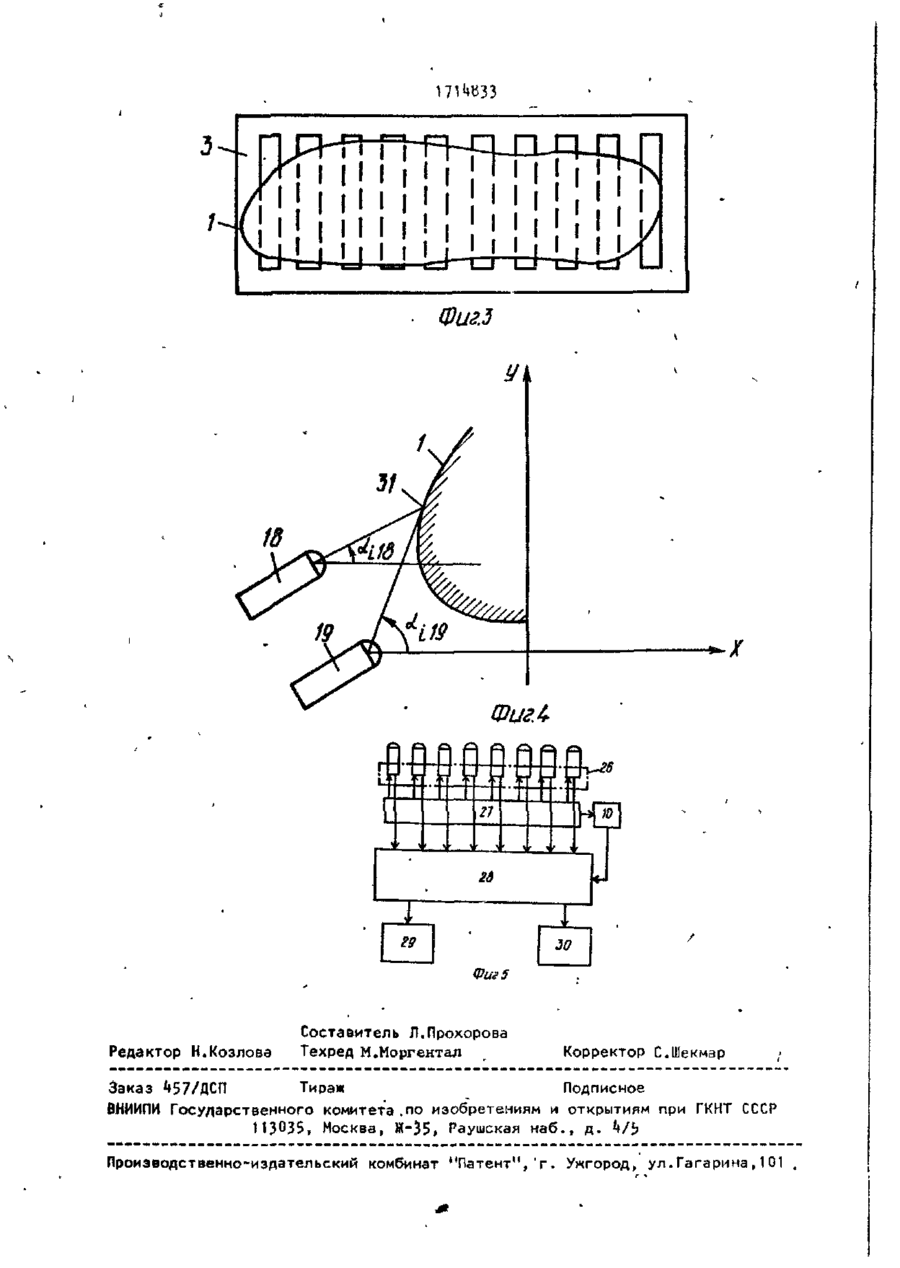
ДЛЯ СЛУЖІ ЫЮГО ПОЛЬЗОВАНИЯ ЭКЗ N* СОЮЗ СО8ЕТСНИХ СОЦИАЛИСТИЧЕСКИХ РЕСПУБЛИК 14833 А1 А ^3 D 1/00 ГОСУДАРСТВЕННЫЙ НОМИТЕТ ПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМ ПРИ ГННТ СССР ОПИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ (22) 17.01.90 175) А.Д.Коленко (53) 685.31.051.2(08».8) (56) Авторское свидетельство СССР W 991996, кл. А **3 D 1/00, 1981. (54) УСТРОЙСТВО ДЛЯ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ СТОПЫ НОГИ (57) Устройство предназначено для математического моделирования стопы ноги в автоматическом режиме для дальнейшего использования полученной модели для создания колодки. Цель изобретения - сокращение времени мо делироваиия стопы ноги. Эта цель достигается тем, что с помощью оптикоэлектронного устройства, использующего принцип регистрации траектории светового пятна, движущегося по поверхности объекта измерения, определяется траектория пятна. Выходы измерительного блока устройства включены на вход электронно-вычислительного устройства, которая вычисляет искомую математическую модель. Модель представлена набором вертикальных профилей поперечных сечений стопы координатно привязанных к продольной оси стопы. 1 с.п,, 2 з.п. ф-лы, 5 ил. (Л Изобретение относится к измерительной технике. Известен прибор для определения формы и размеров стопы. Прибор содержит прозрачную платформу для установки стопы. На стекле платформы нанесена шкала, под платформой установлены зеркала. Прибор содержит фотоаппарат для фотографирования, с помощью зеркал, стопы со шкалой в различных ракурсах. Основные недостатки прототипа: сложность процесса съемки, сложность процесса визуальной обработки полученной информации, высокая производительность в целом процесса измере ний. Целью изобретения является сокращение времени моделирования стопы путем полной автоматизации измерений. Устройство для измерения женской стопы 1, расположенной на каблуке 2 и базовой ажурной платформе 3, содержит основание ht стойки 5 и 6, направляющие 7, ходовой винт 8 с электроприводом 9, измерительную панель 11, излучатель с фокусирующей % системой 12 и электродвигатель со сканирующим зеркалом 13. Поступательное движение измерительной панели 11, при вращении сканиоующего зеркала ЇЗ» приводит к строчной развертке светового пятна на поверхности і измеряемой поверхности с помощью зеркал расположенных на одной стороне панели 11, к регистрации траектории а системе координат панели Н и к регистрации продольного положения панели с помощью счетчика оборотов ходового Р И Н та 10. Информация с выходов углоизмерительных средств панели 11 поступает на вход ЭВМ 28, которая строит трехмерную математическую модель 00 00 І7Й833 На одном из торцев измерительной п а стопы и выводит ее либо на графопонели 1 установлены плоские зеркала 1 строитель, либо на вход программного 14 - 17, на другом торце - углоизмеустройства Фрезерного станка .производящего пресс-форму для изготовления 5 рительные оптико-электронные модули 18 - 25. Выходы модулей, через анаобувной колодки. лого-цифровые преобразователи 26, Положительный эффект , сокращевключены на вход ЭВМ 2В. Выходы гение периода измерений до нескольких нератора тактовых импульсов 27 вклю(if-5) секунд и полное исключение руччены на вход ЭВМ 28. Выходы генера ных работ из цикла измерений. Ю тора тактовых импульсов 27 включены Изобретение относится к измерительна входы АЦП 26 и вход счетчика 10. ной технике, в частности к устройстВыходы ЭВМ 28 включены на входы гравам для измерения объектов сложной фического устройства 29 или програмформы. Целью изобретения является повыше- 15 много устройства фрезерного стайка 30» Устройство работает следующим обние производительности измерений за рахом. счет полной автоматизации последних. Вращение двигателя 9 приводит к На фиг .1-5 показаны схемы ^поясняюпоступательному движению панели 11 щие изобретение. На фиг.1 показана схема устройства со стороны торца. 20 по направляющим 7. Вращение электродвигателя с зеркалом 13 приводит к На фиг.2 показана схема устройства скольжению луча по зеркалам \k - 17» • при виде сбоку. На фиг.З показана отражаясь от которых луч своим пятсхема расположения горизонтальной проном 31 образует траекторию 30 на екции ступни на базовой ажурной-платформе. На фиг.k показана схема базис- 25 поверхности стопы 1, как это показано на фиг.1*. но-угловой' засечки траектории свето•вого пятна движущегося по измеряемому При вращении луча вокруг стопы траконтуру стопы. На фиг.5 показана опектория пятна 31 последовательно ретико-электронная схема устройства, гистрируется парами модулей, как это показано на фиг.1,4, Математическую На схемах обозначены: 1 - женская 30 обработку измерительной информации стопа, расположенная на высоком каб-., ведут на ЭВМ следующим образом: луке; 2 - каблук; 3 - базовая ажур- вычисляют, по способу базисноная платформа (платформа имеет систеугловой засечки, последовательно му поперечных щелей для доступа к стопе сканирующего луча); 4 - основа — 3 5 траекторию по данным модулей 18-19» ние устройства; 5 и 6 - стойки; 7 20-21, 22-23, 24-2$ в соответствии с направляющие; S - ходовой винт; 9 • обходом измеряемого профиля по часовой стрелке, при этом вычисления тоэлектропривод ходового винта; 10 чек траектории ведут согласно системе счетчик оборотов ходового винта; 11 ' измерительная панель; 12 - излуча40 уравнений: тель с фокусирующей системой; 13"* X г X, a электродвигатель со сканирующим зеркалом; ]Ь> 15» 15, 16 и 17 ~ плоские A. ^ 4ft зеркала; 18, 19, 20, 2 1 , 22, 23, 2** и 25 * углоизмерительные модули; блок 45 где K< e ; « * аналого-цифровых преобразователей (АЦП); 27 - генератор тактовых импульсов (ГТИ); 28 - ЭВМ; 29 - графическое устройство; 30 - программное Ж * arctg ^устройство фрезерного станка; 31 ~ 50 световое пятно движущееся по измеряемому контуру; 32 - измеряемый контур. из; arctg На основании U установлены стойки Уі 5 и 6, на которые опираются: платf - постоянные углоизмерительформа 3» направляющие 7, ходовой 55 где с и ного модуля; винт 8 . Н измерительной панели 11 а •установлены (вдоль ходового винта 8) г. - напряжения,снимаемые с осветитель - сканн тор 12 и электровыходов углоизмерительных • двигатель со сканирующим зеркалом 1Д, Г/1'(833 модулей 18 и 19 и подаваками, оптическую систему с плоскими : емые, через АЦП 26, на зеркалами й излучателем, блок записи вход. ЭВМ'28. результатов измерения, о т л и ч а ю щ е е с я тем, что, с целью сокраНапряжения считываются с выходов щения времени'процесса моделирования, модулей синхронно, по команде П И 27. оно дополнительно содержит модулятор, В качестве опорной точки витка измерительную панель, установленную используют точку витка, лежащую наис возможностью поступательного перемеболее близко к оси ОУ. Аппликату опорной точки витка 10 щения по расположенной на основании * направляющей, ходовой еинт со счетчи~ определяют из соотношения: ком оборотов, установленный на основании с возможностью вращения и меха= t-n нически связанным с измерительной панелью, на торцах которой вдоль оси 15 где t - шаг ходового винта,b;, ходового винта укреплены излучатель n - число оборотов ходового с дополнительно введенной фокусируювинта; .щей линзой и модулятор, опорная плат* і - момент времени, соответстформа выполнена с поперечными проревующий регистрации положения зями, расположенными вдоль плоскосточки траектории в районе 20 ти развертки светового луча, и устаоси 0Y. новлена t a стойках основания, несуj Считывание показания счетчика щих опоры ходового винта, а также, оборотов ходового винта 10 происхосодержит углоизмерительные модули,дит по команде ГТИ 27. расположенные на одной стороне измериМатематическая модель представля- 25 тельной панели по схеме базисно-углоет собой набор поперечных сечений вой засечки, на второй стороне кото(профилей) стопы отстоящих друг от рой расположены плоские зеркала, блок друга на известном расстоянии. определении траектории светов'ого луча Математическая модель стопы из на поверхности измеряемой стопы в ЭВМ 28 может быть введена в графи30 трехмерной плоскости, входами подключеское устройство 29 или в програмченный к выходам углоизмерительных мное устройство фрезерного станка 30. модулей и счетчика оборотов ходового как это показано на фиг.5. винта, а выходами связанного с блоУстройство может быть использова||
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for mathematic simulation of foot
Автори англійськоюKolenko Anatolii Dmytrovych
Назва патенту російськоюУстройство для математического моделирования стопы ноги
Автори російськоюКоленко Анатолий Дмитриевич
МПК / Мітки
МПК: A43D 1/00
Мітки: математичного, моделювання, стопи, пристрій, ноги
Код посилання
<a href="https://ua.patents.su/6-7796-pristrijj-dlya-matematichnogo-modelyuvannya-stopi-nogi.html" target="_blank" rel="follow" title="База патентів України">Пристрій для математичного моделювання стопи ноги</a>
Пристрій для корекції вальгусного відхилення першого пальця стопи
Номер патенту: 5498
Опубліковано: 28.12.1994
Автори: Лісогурська Вікторія Андрійовна, Сейдер Едуард Самуїлович, Булаг Євген Григорович
МПК: A61F 5/14
Мітки: першого, пальця, вальгусного, пристрій, відхілення, стопи, корекції
Формула / Реферат:
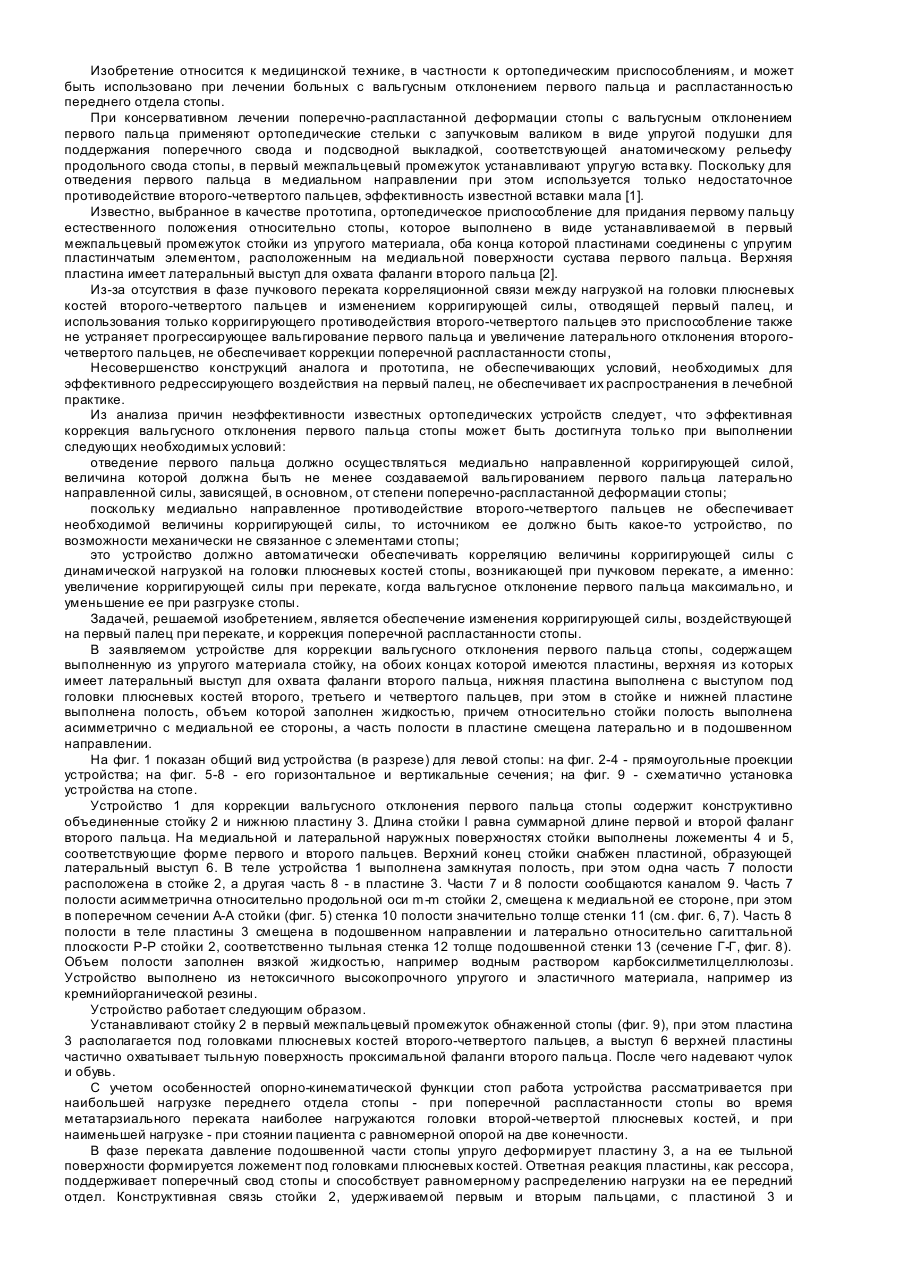
Устройство для коррекции вальгусного отклонения первого пальца стопы, содержащее выполненную из упругого материала стойку, на обоих концах которой имеются пластины, верхняя из которых имеет латеральный выступ для охвата фаланги второго пальца, отличающееся тем, что нижняя пластина выполнена с выступом под плюсовые кости второго, третьего и четвертого пальца, при этом в стойке и нижней пластине выполнена полость, объем которой заполнен...
Пристрій для різання стопи аркушевого паперового матеріалу
Номер патенту: 2584
Опубліковано: 26.12.1994
Автори: Бойчук Анатолій Леонідович, Якубовський Володимир Григорович, Полюдов Олександр Миколайович, Петріашвілі Георгій Георгійович
МПК: B26D 1/01
Мітки: матеріалу, різання, пристрій, аркушевого, стопи, паперового
Формула / Реферат:
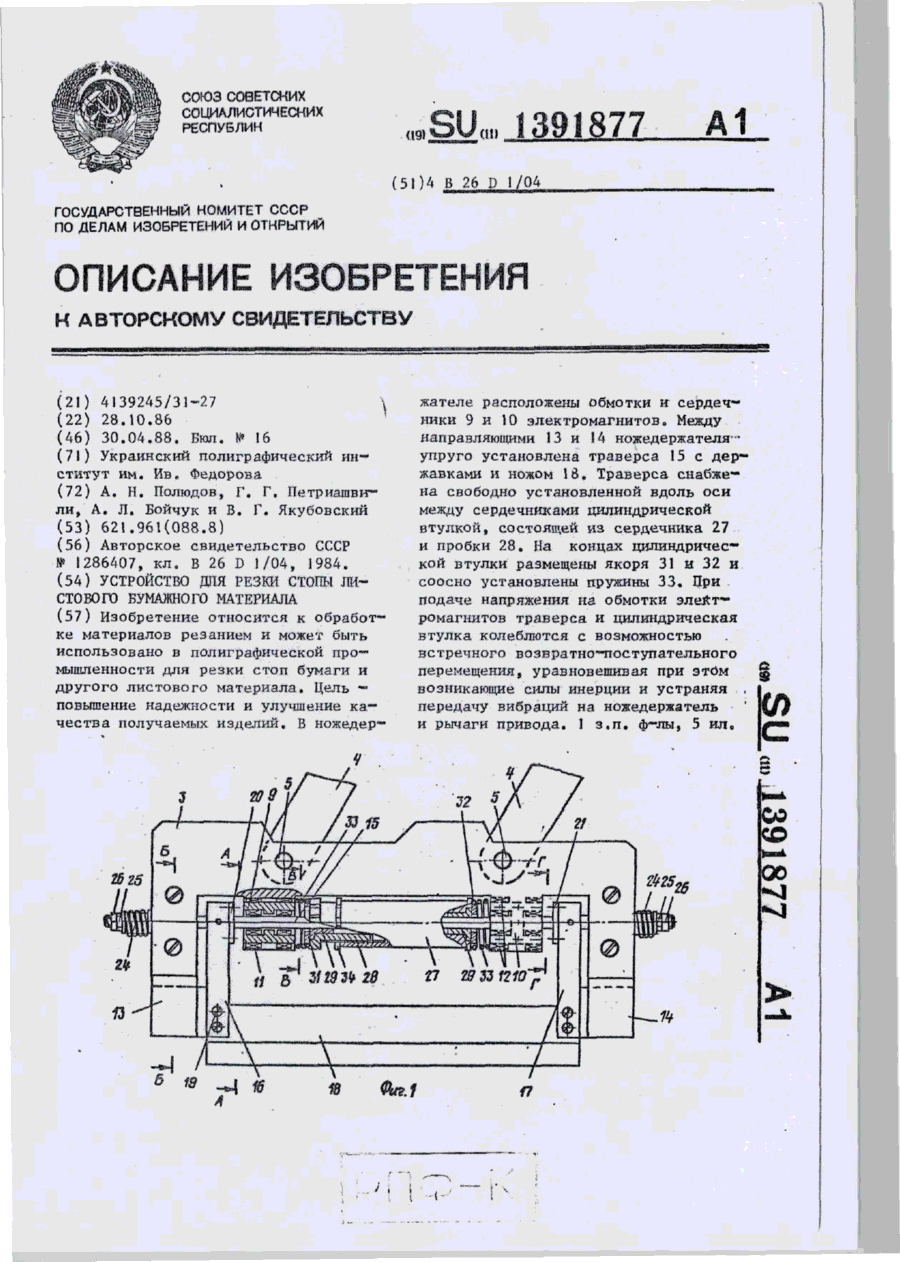
1. Устройство для резки стопы листового бумажного материала, содержащее станину, стол с установленным в нем марзаном, прижимную балку, ножедержатель с ножом, связанный с приводом, и вибратор, выполненный в виде реактивной части, включающей электромагниты и сердечники, и активной части, включающей траверсу, установленную между направляющими и упруго связанную с ножедержателем, державки, расположенные по обе стороны траверсы, и якоря...
Триножова машина для різки стопи блоків паперу
Номер патенту: 5904
Опубліковано: 29.12.1994
Автори: Гірко Володимир Володимирович, Тищенко Григорій Макарович, Москаленко Микола Пилипович, Фліман Пилип Ізрайльович, Макаренко Костянтин Михайлович
МПК: B23D 31/00, B26D 1/00
Мітки: паперу, триножова, блоків, машина, стопи, різки
Формула / Реферат:
Трехножевая машина для резки стопы блоков бумаги, содержащая механизм подачи стопы в зону резания, выполненный в виде ку чисы, связанной с зажимом стопы и опоры, закрепленной на станине, механизм вывода стопы из зоны резания, механизмы прижима, резания и форматной переналадки, отличающаяся тем, что, с целью упрощения обслуживания, механизм вывода стопы из зоны резания снабжен дополнительной кулисой и опорой, закрепленной на станине, при...
Пристрій для вимірювання фазового зсуву
Номер патенту: 457
Опубліковано: 30.04.1993
Автори: Свідлер Ігор Давидович, Токовенко Степан Омелянович
МПК: G01R 25/00
Мітки: фазового, вимірювання, пристрій, зсуву
Формула / Реферат:
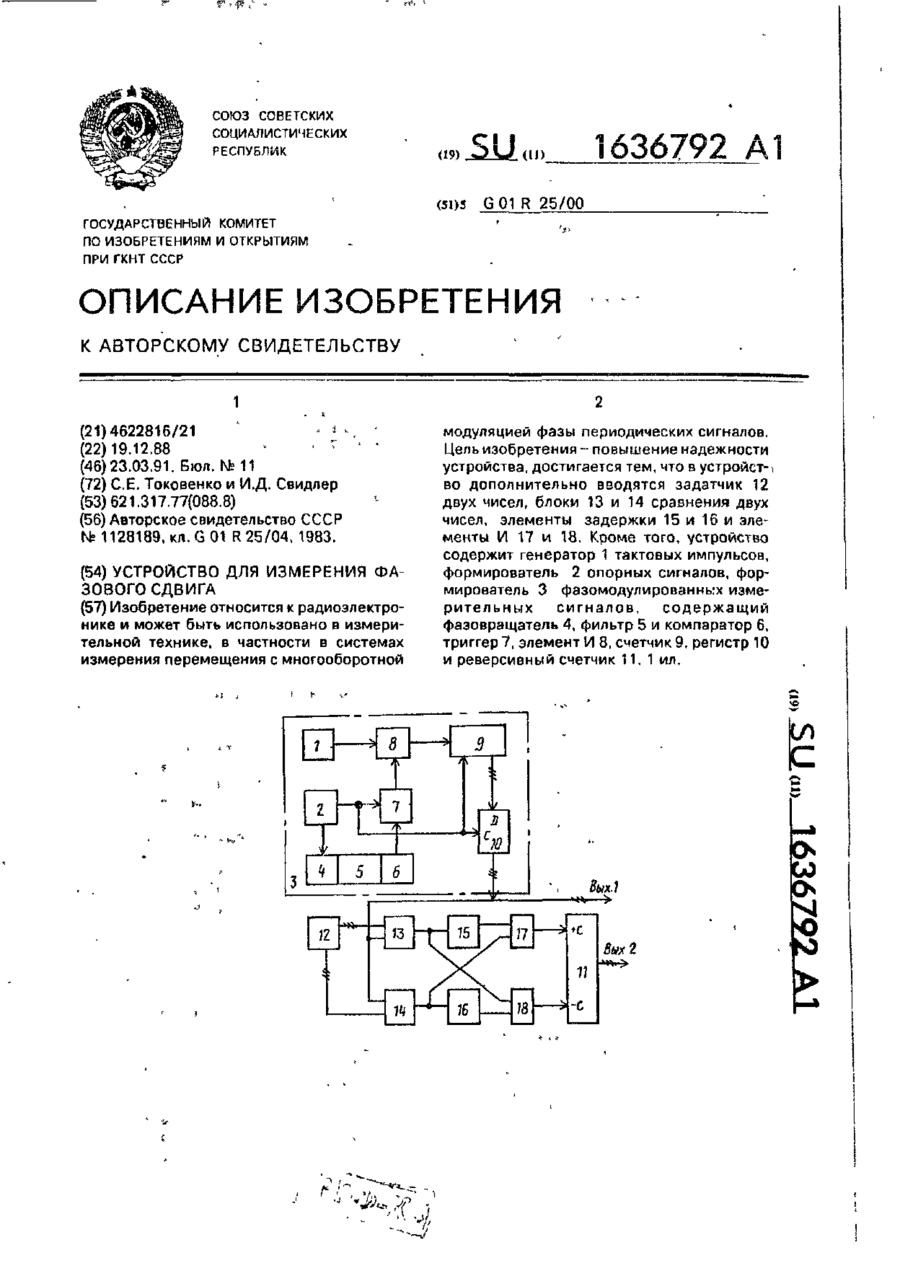
Формула изобретенияУстройство для измерения фазового сдвига, содержащее триггерный фазометр, выход которого является первым выходом устройства и реверсивный счетчик, выход которого является вторым выходом устройства, отличающееся тем, что, с целью повышения надежности устройства, в него дополнительно введены задатчик двух чисел, два блока сравнения двух чисел, два элемента задержки и два элемента И, причем выход триггерного фазометра...
Пристрій для формування залишків по модулю
Номер патенту: 614
Опубліковано: 15.12.1993
Автор: Черкаський Микола Вячеславович
МПК: G06F 7/60, G06F 11/00
Мітки: залишків, модулю, формування, пристрій
Формула / Реферат:
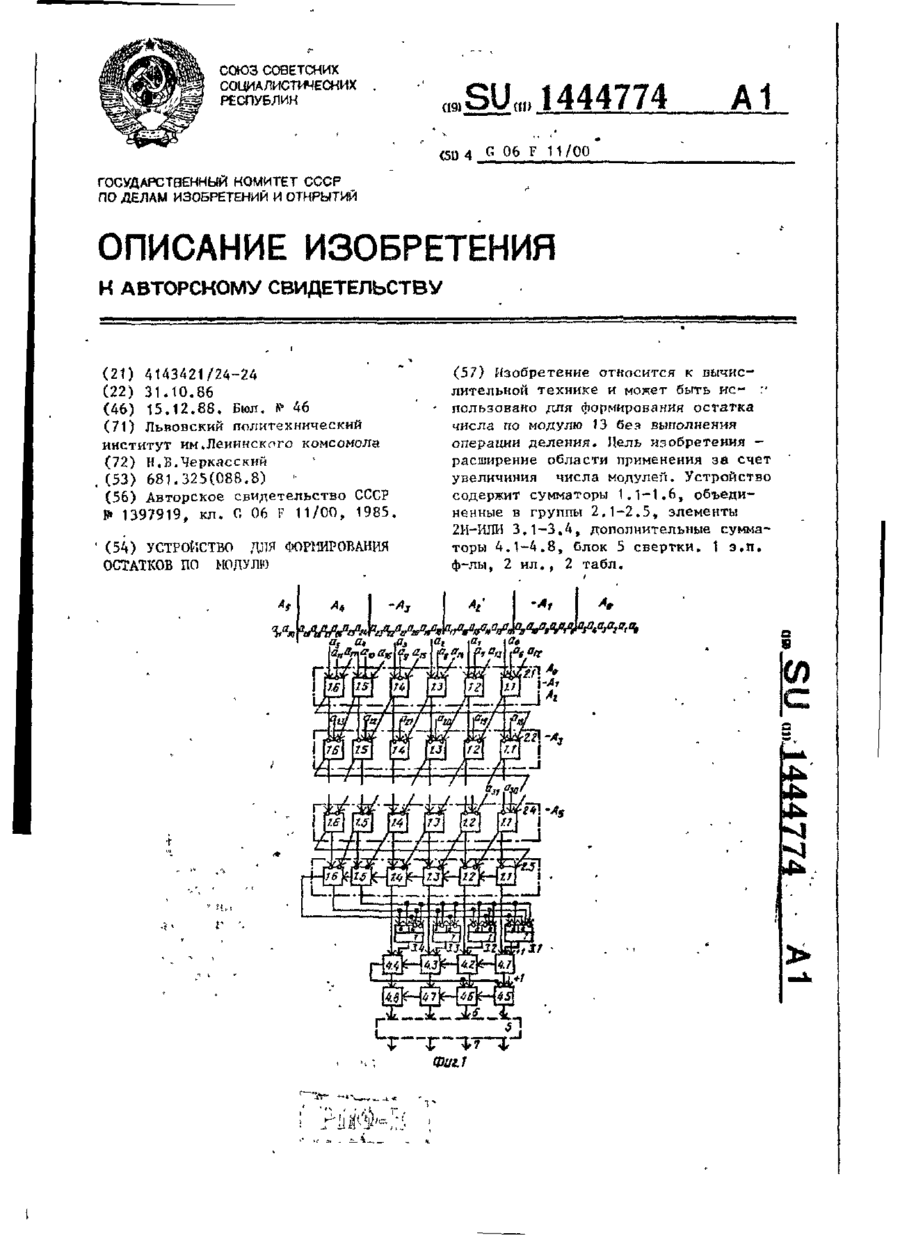
Формула изобретения1. Устройство для формирования остатков по модулю, содержащее 1-1 группу сумматоров (1 = n/q, n - разрядность числа, q - число сумматоров в группе) и блок свертки, выходы которого являются выходами устройства, прямые входы первого слагаемого и входы переноса сумматоров первой группы являются первой, второй и третьей группами информационного входов устройства, прямые входы первого слагаемого сумматоров (і-й группы. (і...
Попередній патент: Пристрій для індикації з контролем
Наступний патент: Пристрій для виміру кутового положення випромінювача
Випадковий патент: Транспортер бурякозбиральної машини