Пристрій для керування рухомими об’єктами

Формула / Реферат
Пристрій для керування рухомими об'єктами, що містить головку запису та розташовані співвісно двощілинну та однощілинну головки зчитування, перша з яких з'єднана через включені послідовно перший фазовий детектор та пороговий елемент з першим входом елемента (І), а друга підключена через другий фазовий детектор до входів перших паралельних ланцюгів, складених із включених послідовно порогового елемента і елемента (НІ) та підключених виходами до другого та третього входів елемента (І), вихід якого з'єднаний з першим входом виконавчого блока, підключеного виходом до приводу, а також містить однощілинну головку запису, встановлену співвісно з основною однощілинною головкою зчитування та перпендикулярно їй, третій фазовий детектор та другі паралельні ланцюги, складені із включених послідовно порогового елемента та елемента (НІ), причому вихід однощілинної головки зчитування підключений через третій фазовий детектор до входів других паралельних ланцюгів, виходи яких з'єднані з четвертим та п'ятим входами елемента І, який відрізняється тим, що пристрій обладнано додатковими четвертою, п'ятою, шостою та сьомою однощілинними головками зчитування, розташованими по дві взаємно перпендикулярно та симетрично відносно осі основних головок зчитування на відстані, що дорівнює відповідно половині товщини та ширини полюса головки запису, при цьому кожна з четвертої-сьомої однощілинних головок зчитування зв'язана через фазовий детектор з двома пороговими елементами, вихід одного з яких підключений до входів елемента І, а вихід іншого - до першого входу елемента (АБО), другий вхід якого сполучений з виходом одного з порогових елементів паралельних ланцюгів, виходи елементів (АБО) та виходи порогових елементів паралельних ланцюгів підключені до входів виконавчого блока.
Текст
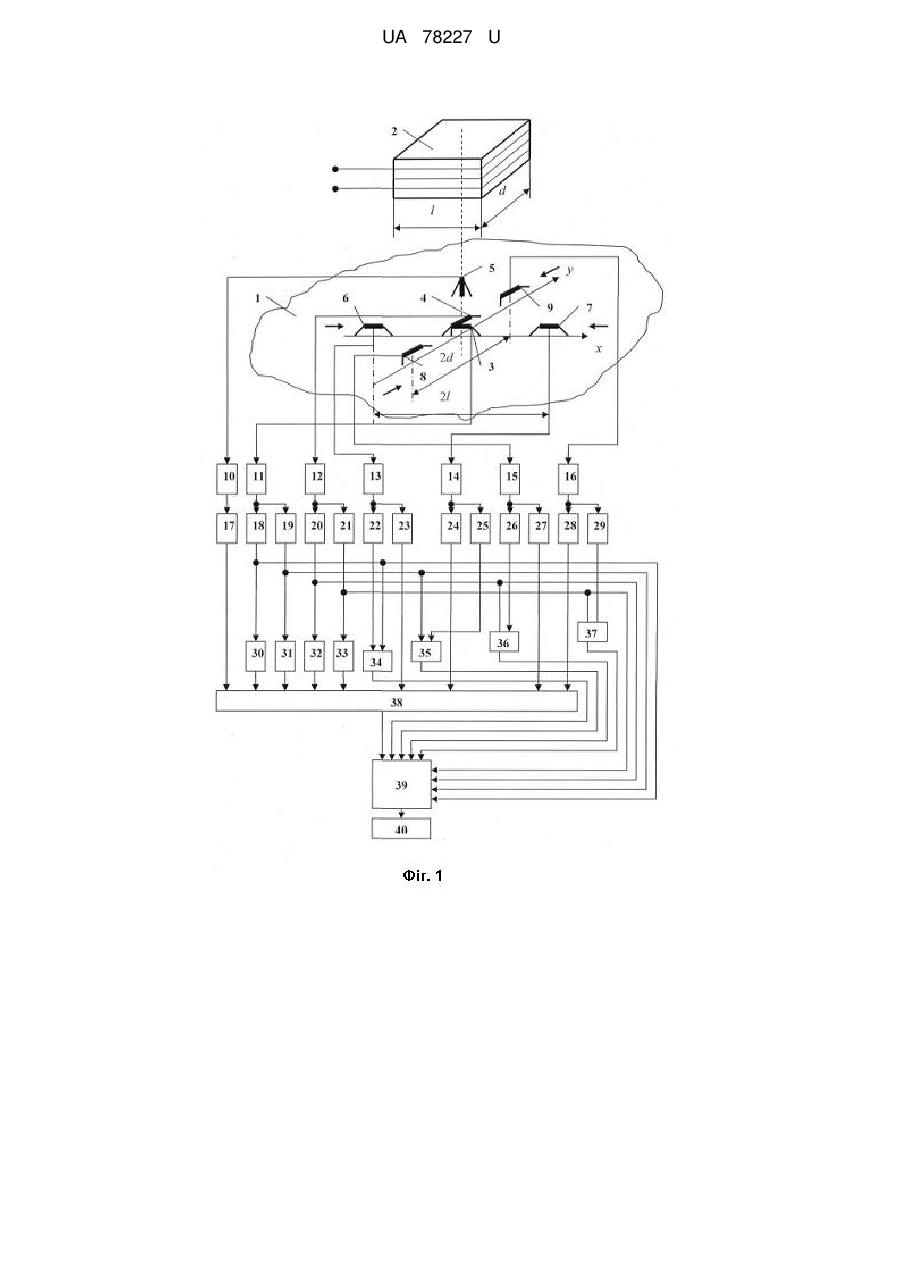
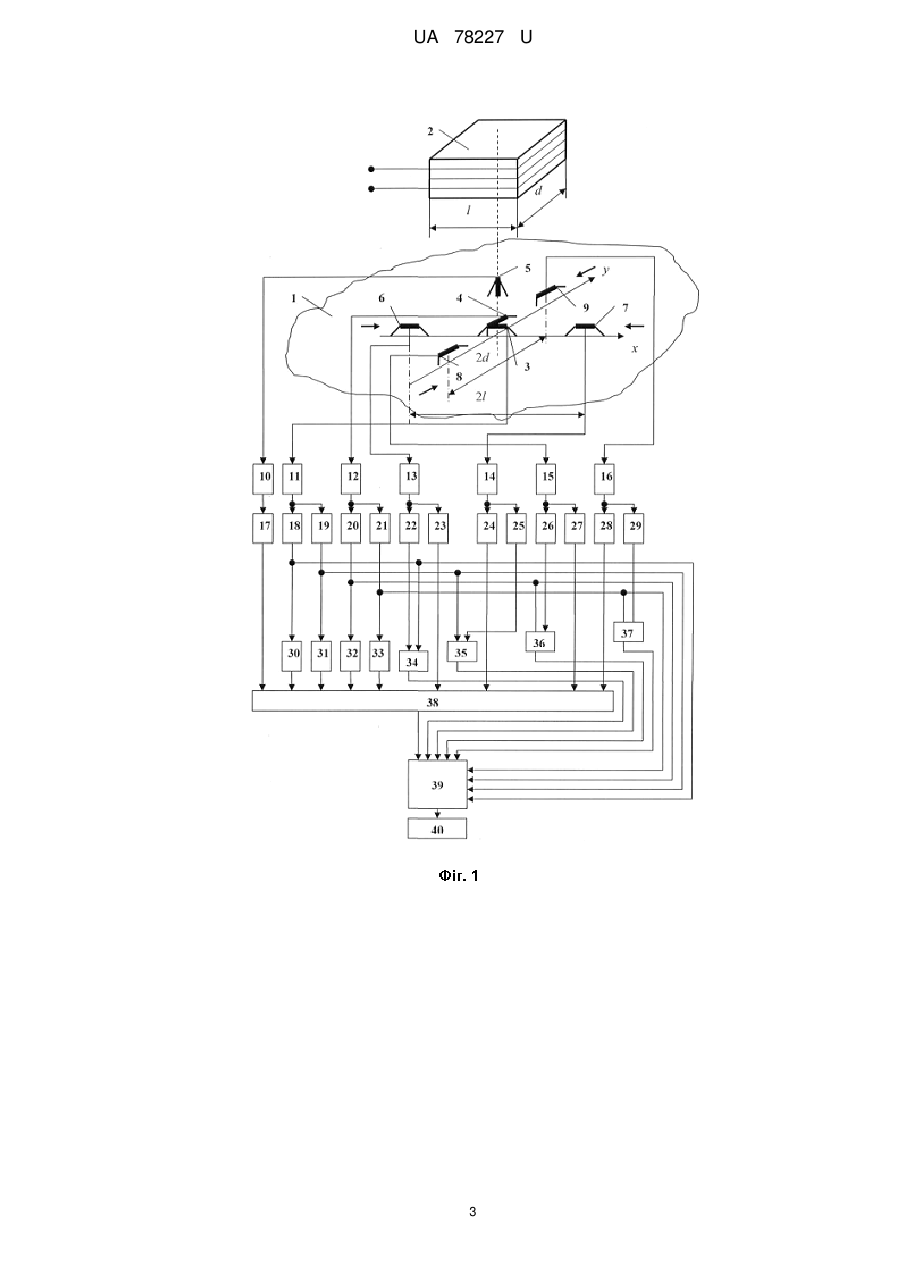
Реферат: UA 78227 U UA 78227 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до автоматичного керування рухомими об'єктами, наприклад транспортними одиницями, з використанням магнітного запису на нестандартні носії. Відомо пристрій для керування рухомими об'єктами, що містить стрижневу головку запису та розташовані співвісно двощілинну та однощілинну головки зчитування, перша з яких з'єднана через включені послідовно перший фазовий детектор та пороговий елемент з першим входом елемента І, а друга підключена через другий фазовий детектор до входів перших паралельних ланцюгів, складених із включених послідовно порогового елемента та елемента НІ та підключених виходами до другого та третього входів елемента І, вихід якого та входи паралельних ланцюгів з'єднані відповідно з першим та другим входами виконавчого блока, підключеного виходом до приводу, а також містить додаткову однощілинну головку зчитування, встановлену співвісно з основною однощілинною головкою зчитування та перпендикулярно їй, третій фазовий детектор та другі паралельні ланцюги, складені зі включених послідовно порогового елемента та елемента НІ, причому вихід додаткової однощілинної головки зчитування підключений через третій фазовий детектор до третього входу виконавчого блока та входам других паралельних ланцюгів, виходи яких з'єднані з четвертим та п'ятим входами елемента І [див. а.с. СРСР №752465, МПК G11В 5/48, опубл. 30.07.1980, бюл. № 28]. Цей пристрій вибрано за прототип. Недоліком відомого пристрою є те, що пристрій не забезпечує вироблення широкої зони регулювання швидкості рухомого об'єкта та команд на її зменшення в околі точної зупинки, що знижує точність керування рухомими об'єктами. В основу корисної моделі поставлена задача вдосконалення пристрою для керування рухомими об'єктами шляхом того, що пристрій обладнано додатковими четвертою, п'ятою, шостою та сьомою однощілинними головками зчитування, розташованими по дві взаємно перпендикулярно та симетрично відносно осі основних головок зчитування на відстані, що дорівнює відповідно половині товщини та ширини полюса головки запису, фазовими детекторами, пороговими елементами та елементами АБО, що дозволить завдяки виробленню сигналів на зниження швидкості рухомого об'єкта у зоні точної зупинки підвищити надійність роботи пристрою в умовах дії локальних перешкод, пов'язаних з якістю нестандартного магнітоносія. Поставлена задача вирішується тим, що пристрій для керування рухомими об'єктами, що містить головку запису та розташовані співвісно двощілинну та однощілинну головки зчитування, перша з яких з'єднана через включені послідовно перший фазовий детектор та пороговий елемент з першим входом елемента І, а друга підключена через другий фазовий детектор до входів перших паралельних ланцюгів, складених із включених послідовно порогового елемента і елемента НІ та підключених виходами до другого та третього входів елемента І, вихід якого з'єднаний з першим входом виконавчого блока, підключеного виходом до приводу, а також містить однощілинну головку запису, встановлену співвісно з основною однощілинною головкою зчитування та перпендикулярно їй, третій фазовий детектор та другі паралельні ланцюги, складені із включених послідовно порогового елемента та елемента НІ, причому вихід однощілинної головки зчитування підключений через третій фазовий детектор до входів других паралельних ланцюгів, виходи яких з'єднані з четвертим та п'ятим входами елемента І, згідно з корисною моделлю, пристрій обладнано додатковими четвертою, п'ятою, шостою та сьомою однощілинними головками зчитування, розташованими по дві взаємно перпендикулярно та симетрично відносно осі основних головок зчитування на відстані, що дорівнює відповідно половині товщини та ширини полюса головки запису, при цьому кожна з четвертої-сьомої однощілинних головок зчитування зв'язана через фазовий детектор з двома пороговими елементами, вихід одного з яких підключений до входів елемента І, а вихід іншого до першого входу елемента АБО, другий вхід якого сполучений з виходом одного з порогових елементів паралельних ланцюгів, виходи елементів АБО та виходи порогових елементів паралельних ланцюгів підключені до входів виконавчого блока. Суть корисної моделі пояснюється кресленням, де зображено пристрій для керування рухомими об'єктами (фіг. 1), що містить магнітоносій 1, головку запису 2, рухомий об'єкт (на кресленні не показаний) із закріпленими на ньому однощілинними головками зчитування 3 та 4, співвісно з якими розташована двощілинна головка зчитування 5, однощілинними головками зчитування 6-9, розташованими по дві взаємно перпендикулярно та симетрично відносно осі основних головок зчитування 3-5 на відстані, що дорівнює відповідно половині товщини l та ширини d полюса головки запису 2, фазові детектори 10-16, порогові елементи 17-29, логічні елементи НІ 30-33, елементи АБО 34-37, елемент І 38, виконавчий блок 39, підключений виходом до приводу 40. Оскільки протяжність локального магнітного поля перешкоди менша, 1 UA 78227 U 5 10 15 20 25 30 35 40 45 ніж величини l та d, пристрій від поля перешкоди не спрацьовує, що забезпечує суттєве підвищення перешкодозахищеності пристрою. На фіг. 2 зображено діаграми роботи пристрою. Пристрій для керування рухомими об'єктами працює наступним чином. Попередньо на магнітоносій 1 наносяться магнітні мітки за допомогою стрижневої головки запису 2. У момент збігу блока головок зчитування 3-9 з центром магнітної мітки сигнали з однощілинних головок зчитування 3 (ось х) та 4 (ось у) не подаються, внаслідок чого порогові елементи 18-21, що мають пороги спрацювання ±, вимкнені, а з виходів елементів НІ 30-33 одиничні сигнали надходять на другий-п'ятий входи елемента І 38, на перший вхід якого подається сигнал з виходу порогового елемента 17 (епюра u17, фіг. 2), підключеного через фазовий детектор 10 (епюра u10, фіг. 2) до двощілинної головки зчитування 5, з виходу порогових елементів 23, 24 (ось х), 27, 28 (ось у) одиничні сигнали подаються на шостий-дев'ятий входи елемента І 38, у результаті чого на його виході формується сигнал на точну зупинку рухомого об'єкта (епюра u38, фіг. 2). При зсуві об'єкта вздовж осі x праворуч на виході порогового елемента 18 (епюра u 18, фіг. 2) з'являється сигнал ПРАВОРУЧх1 низької швидкості, який подається на вхід виконавчого блока 39 та вхід елемента АБО 34. При подальшому русі вздовж осі х праворуч з виходу порогового елемента 22 (епюра u22, фіг. 2) сигнал подається на інший вхід елемента АБО 34, який виробляє сигнал підвищеної швидкості ПРАВОРУЧх2 (епюра u34, фіг. 2). При зсуві об'єкта вздовж осі х ліворуч пристрій працює аналогічно (епюри u13, u25, u35, фіг. 2). При зсуві об'єкта вздовж осі у вперед та назад пристрій працює аналогічно, у цьому разі вмикаються порогові елементи 20, 21, 26-29 та елементи АБО 36, 37. Запропонована корисна модель забезпечить високу точність наведення рухомих об'єктів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Пристрій для керування рухомими об'єктами, що містить головку запису та розташовані співвісно двощілинну та однощілинну головки зчитування, перша з яких з'єднана через включені послідовно перший фазовий детектор та пороговий елемент з першим входом елемента (І), а друга підключена через другий фазовий детектор до входів перших паралельних ланцюгів, складених із включених послідовно порогового елемента і елемента (НІ) та підключених виходами до другого та третього входів елемента (І), вихід якого з'єднаний з першим входом виконавчого блока, підключеного виходом до приводу, а також містить однощілинну головку запису, встановлену співвісно з основною однощілинною головкою зчитування та перпендикулярно їй, третій фазовий детектор та другі паралельні ланцюги, складені із включених послідовно порогового елемента та елемента (НІ), причому вихід однощілинної головки зчитування підключений через третій фазовий детектор до входів других паралельних ланцюгів, виходи яких з'єднані з четвертим та п'ятим входами елемента І, який відрізняється тим, що пристрій обладнано додатковими четвертою, п'ятою, шостою та сьомою однощілинними головками зчитування, розташованими по дві взаємно перпендикулярно та симетрично відносно осі основних головок зчитування на відстані, що дорівнює відповідно половині товщини та ширини полюса головки запису, при цьому кожна з четвертої-сьомої однощілинних головок зчитування зв'язана через фазовий детектор з двома пороговими елементами, вихід одного з яких підключений до входів елемента І, а вихід іншого - до першого входу елемента (АБО), другий вхід якого сполучений з виходом одного з порогових елементів паралельних ланцюгів, виходи елементів (АБО) та виходи порогових елементів паралельних ланцюгів підключені до входів виконавчого блока. 2 UA 78227 U 3 UA 78227 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for controlling movable objects
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюУстройство для управления подвижными объектами
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G11B 5/48
Мітки: пристрій, об'єктами, рухомими, керування
Код посилання
<a href="https://ua.patents.su/6-78227-pristrijj-dlya-keruvannya-rukhomimi-obehktami.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування рухомими об’єктами</a>
Пристрій для керування рухомими об’єктами
Номер патенту: 50467
Опубліковано: 10.06.2010
Автор: Смірний Михайло Федорович
МПК: G01G 7/00
Мітки: рухомими, пристрій, керування, об'єктами
Формула / Реферат:
Пристрій для керування рухомими об'єктами, що містить головку запису та розташовані співвісно двощілинну та однощілинну головки зчитування, перша з яких з'єднана через включені послідовно перший фазовий детектор та пороговий елемент з першим входом елемента І, а друга підключена через другий фазовий детектор до входів перших паралельних ланцюгів, що складаються із включених послідовно порогового елемента та елемента HI та підключених...
Пристрій для керування рухомими об’єктами
Номер патенту: 68793
Опубліковано: 10.04.2012
Автор: Смірний Михайло Федорович
МПК: G11B 5/48
Мітки: об'єктами, пристрій, керування, рухомими
Формула / Реферат:
Пристрій для керування рухомими об'єктами, що містить стрижневу головку запису та розташовані співвісно двощілинну та однощілинну головки зчитування, перша з яких з'єднана через включені послідовно перший фазовий детектор та пороговий елемент з першим входом елемента І, а друга підключена через другий фазовий детектор до входів перших паралельних ланцюгів, складених із включених послідовно порогового елемента та елемента НІ та підключених...
Пристрій для керування рухомими об’єктами
Номер патенту: 50883
Опубліковано: 25.06.2010
Автор: Смірний Михайло Федорович
МПК: G11B 5/48
Мітки: пристрій, керування, об'єктами, рухомими
Формула / Реферат:
Пристрій для керування рухомими об'єктами, що містить головку запису та розташовані співвісно двощілинну та однощілинну головки зчитування, перша з яких з'єднана через включені послідовно перший фазовий детектор та пороговий елемент з першим входом елемента І, а друга підключена через другий фазовий детектор до входів перших паралельних ланцюгів, складених із включених послідовно порогового елемента і елемента НІ та підключених виходами до...
Пристрій для керування рухомими об’єктами

Номер патенту: 54970
Опубліковано: 25.11.2010
Автор: Смірний Михайло Федорович
МПК: G11B 5/48
Мітки: рухомими, пристрій, об'єктами, керування
Формула / Реферат:
Пристрій для керування рухомими об'єктами, що містить головку запису та розташовані співвісно двощілинну та однощілинну головки зчитування, перша з яких з'єднана через включені послідовно перший фазовий детектор та пороговий елемент з першим входом елемента І, а друга підключена через другий фазовий детектор до входів перших паралельних ланцюгів, складених із включених послідовно порогового елемента і елемента НІ та підключених виходами до...
Пристрій для керування рухомими об’єктами
Номер патенту: 66760
Опубліковано: 10.01.2012
Автор: Смірний Михайло Федорович
МПК: G11B 5/48
Мітки: пристрій, об'єктами, керування, рухомими
Формула / Реферат:
Пристрій для керування рухомими об'єктами, що містить головку запису та розташовані співвісно двощілинну та однощілинну головки зчитування, перша з яких з'єднана через включені послідовно перший фазовий детектор та пороговий елемент з першим входом елемента І, а друга підключена через другий фазовий детектор до входів перших паралельних ланцюгів, складених із включених послідовно порогового елемента і елемента НІ та підключених виходами до...
Попередній патент: Пристрій для зчитування інформації з профільного металевого носія
Наступний патент: Пристрій для зчитування інформації з профільного металевого носія
Випадковий патент: Завадозахищена супутникова система зв'язку