Пристрій для керування рухомими об’єктами

Формула / Реферат
Пристрій для керування рухомими об'єктами, що містить головку запису та розташовані співвісно двощілинну та однощілинну головки зчитування, перша з яких з'єднана через включені послідовно перший фазовий детектор та пороговий елемент з першим входом елемента І, а друга підключена через другий фазовий детектор до входів перших паралельних ланцюгів, що складаються із включених послідовно порогового елемента та елемента HI та підключених виходами до другого та третього входів елемента І, вихід якого та входи паралельних ланцюгів з'єднані відповідно з першим та другим входами виконавчого блока, підключеного виходом до приводу, а також містить додаткову однощілинну головку запису, встановлену співвісно з основною однощілинною головкою зчитування та перпендикулярно їй, третій фазовий детектор та другі паралельні ланцюги, що складаються із включених послідовно порогового елемента та елемента HI, причому вихід додаткової однощілинної головки зчитування підключений через третій фазовий детектор до третього входу виконавчого блока та входам других паралельних ланцюгів, виходи яких з'єднані з четвертим та п'ятим входами елемента І, який відрізняється тим, що пристрій обладнано додатковими чотирма двощілинними головками зчитування, розташованими по дві взаємно перпендикулярно та симетрично відносно осі основних головок зчитування та зв'язаними через включені послідовно фазові детектори та порогові елементи із входами елемента І, причому кожну із додаткових двощілинних головок зчитування розміщено від осі основних головок зчитування на відстані, що дорівнює половині товщини полюса головки запису.
Текст
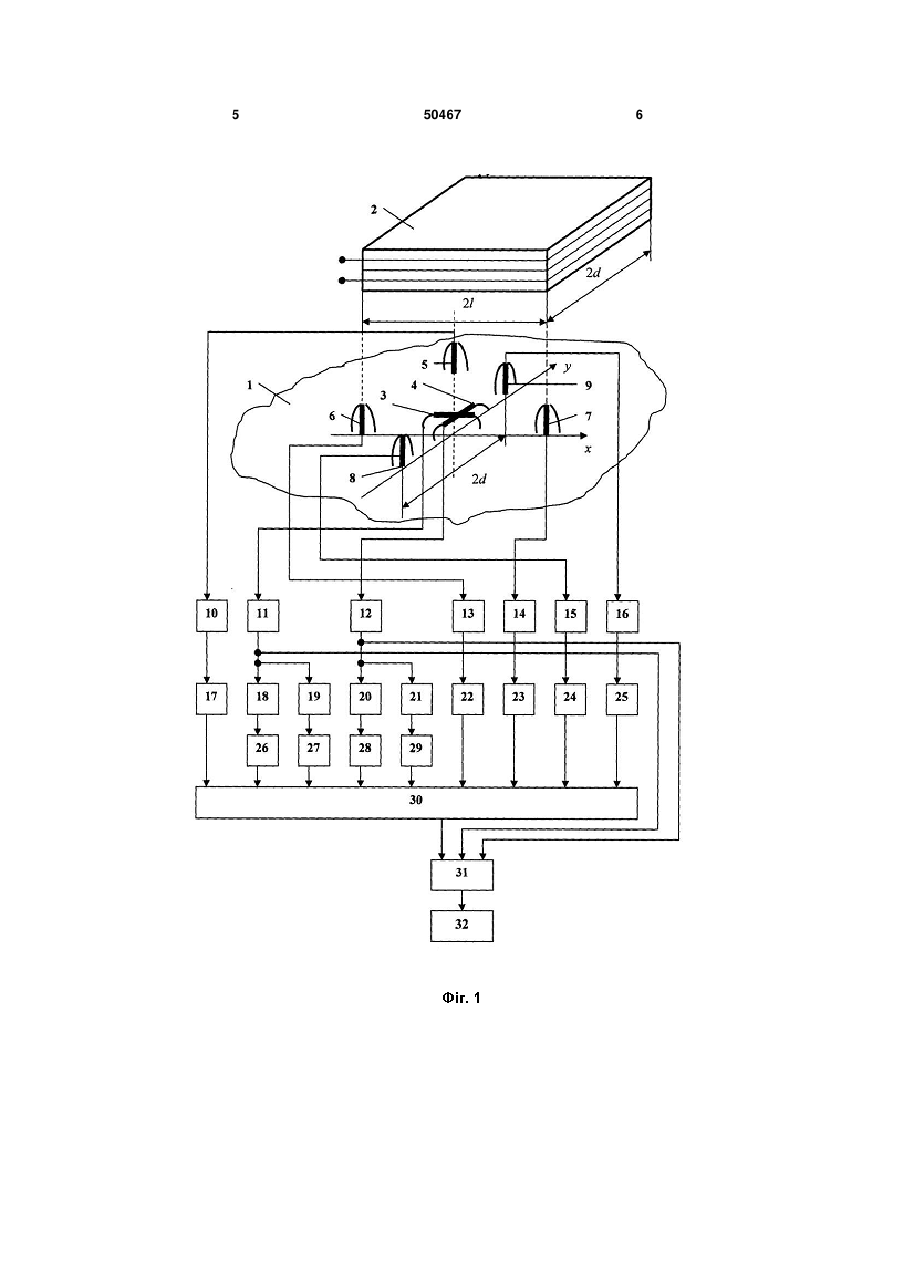
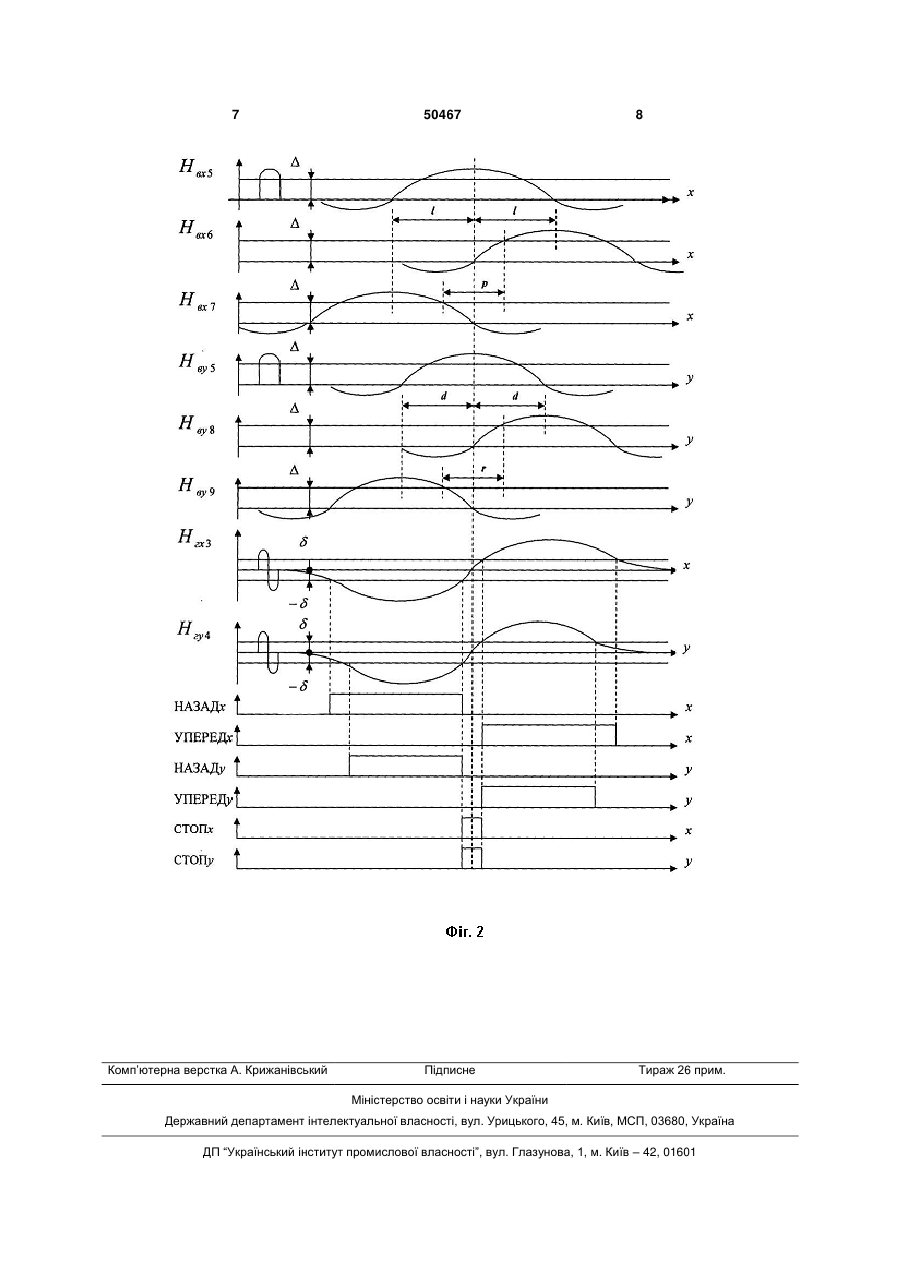
Пристрій для керування рухомими об'єктами, що містить головку запису та розташовані співвісно двощілинну та однощілинну головки зчитування, перша з яких з'єднана через включені послідовно перший фазовий детектор та пороговий елемент з першим входом елемента І, а друга підключена через другий фазовий детектор до входів перших паралельних ланцюгів, що складаються із включених послідовно порогового елемента та елемента HI та підключених виходами до другого та третього входів елемента І, вихід якого та входи паралельних ланцюгів з'єднані відповідно з першим та другим входами виконавчого блока, підключеного виходом до приводу, а також містить U 1 3 рез включені послідовно фазові детектори та порогові елементи зі входами елемента І. Поставлена задача досягається тим, що пристрій для керування рухомими об'єктами, що містить головку запису та розташовані співвісно двощілинну та однощілинну головки зчитування, перша з яких з'єднана через включені послідовно перший фазовий детектор та пороговий елемент з першим входом елемента І, а друга підключена через другий фазовий детектор до входів перших паралельних ланцюгів, що складаються із включених послідовно порогового елемента та елемента НІ та підключених виходами до другого та третього входів елемента І, вихід якого та входи паралельних ланцюгів з'єднані відповідно з першим та другим входами виконавчого блоку, підключеного виходом до приводу, а також містить додаткову однощілинну головку запису, встановлену співвісно з основною однощілинною головкою зчитування та перпендикулярно їй, третій фазовий детектор та другі паралельні ланцюги, що складаються із включених послідовно порогового елемента та елемента НІ, причому вихід додаткової однощілинної головки зчитування підключений через третій фазовий детектор до третього входу виконавчого блоку та входам других паралельних ланцюгів, виходи яких з'єднані з четвертим та п'ятим входами елемента І, згідно корисної моделі, пристрій обладнано додатковими чотирма двощілинниими головками зчитування, розташованими по дві взаємно перпендикулярно та симетрично відносно вісі основних головок зчитування та зв'язані через включені послідовно фазові детектори та порогові елементи зі входами елемента І, причому кожну із додаткових двощілинних головок зчитування розміщено від вісі основних головок зчитування на відстані, що дорівнює половині товщини полюса головки запису. Суть корисної моделі пояснюється кресленням, де зображено пристрій для керування рухомими об'єктами (Фіг.1), що містить магнітоносій 1, головку запису 2, рухомий об'єкт (на фігурі не показаний) із закріпленими на ньому однощілинними головками зчитування 3 та 4, співвісно з якими розташована двощілинна головка зчитування 5, та двощілинними головками зчитування 6-9, розташованими по дві взаємно перпендикулярно та симетрично відносно згаданої вісі, фазові детекто 50467 4 ри 10-16, порогові елементи 17-25, логічні елементи НІ 26-29, логічний елемент І 30, виконавчий блок 31 та привод 32. Головки зчитування 6 та 7 розміщені одна від одної на відстані 21, а головки зчитування 8 та 9 - одна від одної на відстані 2d. Пристрій для керування рухомими об'єктами працює таким чином. Попередньо на носій 1 наносяться магнітні мітки за допомогою стрижневої головки запису 2. Конфігурація зовнішнього магнітного поля мітки, а саме вертикальні та горизонтальні складові напруженості вздовж вісей х та у представлені на Фіг.2 (епюри Нвх5, Нвх6, Нвх7, Нву5, Нву8, Нву9, Нгх3, Нгу4). При русі об'єкта, на якому розташовані головки зчитування 3-9, в момент входження центра головок зчитування 3-9 в зону магнітної мітки на виходах двощілинних головок зчитування 5-9 з'являються сигнали, які через фазові детектори 10, 13-16 подаються відповідно на порогові елементи 17, 22-23, які спрацьовують при перевищенні сигналів порогів спрацювання , а на виходах однощілинних головок зчитування 3 та 4 з'являються сигнали, які через фазові детектори 11 та 12 подаються у виконавчий блок 31, в якому виробляються сигнали керування по двох координатах х та у (епюри НАЗАДх, УПЕРЕДх, НАЗАДу, УПЕРЕДу, Фіг.2). У момент збігу блока головок зчитування 3-9 з центром магнітної мітки сигнали з двощілинних головок зчитування 5-9 через фазові детектори 10, 13-16 та порогові елементи 17, 22-25 подаються відповідно на перший, шостий-дев'ятий входи елемента І 31, а з однощілинних головок зчитування 3 та 4 сигнали не подаються, оскільки вони менші, ніж пороги спрацювання порогових елементів 18-21, внаслідок чого з виходів елементів НІ 26-29 на другий-п'ятий входи елемента І 32 надходять імпульси, що призводить до включення цього елементу, який виробляє команду на точну зупинку рухомого об'єкта (епюри СТОПх, СТОЦу, Фіг.2). Оскільки протяжність локального магнітного поля перешкоди менша, ніж відстань р між активними частками діаграм двощілинних головок зчитування 6 та 7 та відстань r між активними частками діаграм двощілинних головок зчитування 8 та 9, пристрій від поля перешкоди не спрацьовує, що забезпечує суттєве підвищення перешкодозахищеності та надійності роботи пристрою. 5 50467 6 7 Комп’ютерна верстка А. Крижанівський 50467 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of movable objects
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюУстройство для управления подвижными объектами
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01G 7/00
Мітки: керування, рухомими, пристрій, об'єктами
Код посилання
<a href="https://ua.patents.su/4-50467-pristrijj-dlya-keruvannya-rukhomimi-obehktami.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування рухомими об’єктами</a>
Пристрій для запису та зчитування інформації з магнітного носія
Номер патенту: 50462
Опубліковано: 10.06.2010
Автор: Смірний Михайло Федорович
МПК: G01G 7/00
Мітки: інформації, запису, носія, зчитування, пристрій, магнітного
Формула / Реферат:
Пристрій для запису та зчитування інформації з магнітного носія, що містить плаский магнітний носій, блок запису, П-подібну головку запису, однощілинні головки зчитування, резонансні підсилювачі, фазові детектори, порогові елементи, елементи НІ, елементи І, дешифратор та виконавчий блок, причому дві додаткові однощілинні головки зчитування розміщені симетрично від осі магнітного носія по відношенню до двох основних головок, при цьому кожна з...
Пристрій для зчитування двійкової інформації

Номер патенту: 49584
Опубліковано: 26.04.2010
Автор: Смірний Михайло Федорович
МПК: G06K 07/00
Мітки: інформації, пристрій, зчитування, двійкової
Формула / Реферат:
Пристрій для зчитування двійкової інформації, що містить елемент запису, виконаний у вигляді головки запису, з'єднаної з виходом формувача кодів, два елементи зчитування, виконані у вигляді головок зчитування, виходи яких підключені до відповідних входів блока реєстрації, причому перша головка зчитування виконана двощілинною, друга головка зчитування виконана однощілинною та зміщена відносно першої головки зчитування по осі вздовж носія...
Пристрій для зчитування інформації з профільного металевого носія

Номер патенту: 49583
Опубліковано: 26.04.2010
Автор: Смірний Михайло Федорович
МПК: G06K 7/00
Мітки: носія, профільного, пристрій, зчитування, інформації, металевого
Формула / Реферат:
Пристрій для зчитування інформації з профільного металевого носія, що містить перший індуктивний елемент зчитування, розміщений над поверхнею носія, обмотка якого підключена через послідовно з'єднані перший фазовий детектор і формувачі сигналів зчитування до одних зі входів елементів І, підключених через дешифратор до блока обробки інформації, другий та третій індуктивні елементи, розміщені співвісно між собою у площині двох бокових граней...
Пристрій для дистанційного релейно-контактного керування по тролеях
Номер патенту: 81909
Опубліковано: 25.02.2008
Автор: Долгов Юрій Леонідович
МПК: B60L 15/00, B61L 25/00, B60L 15/20
Мітки: релейно-контактного, пристрій, дистанційного, керування, тролеях
Формула / Реферат:
Пристрій для дистанційного релейно-контактного керування по тролеях, наприклад електровозами з приводом змінного струму і живленням по чотирипровідній контактній лінії, що складається з двох паралельних ланцюгів, підключених однією спільною точкою до тролейного провідника, і двох паралельних ланцюгів, підключених однією спільною точкою до тролейного струмознімача, інші спільні точки обох паралельних ланцюгів включені в ланцюг змінного...
Система контролю і керування рухомими та стаціонарними об’єктами
Номер патенту: 77063
Опубліковано: 16.10.2006
Автори: Шевченко Анатолій Іванович, Полівцев Сергій Олександрович
МПК: H04Q 7/22, G08B 25/10
Мітки: керування, об'єктами, контролю, стаціонарними, система, рухомими
Формула / Реферат:
1. Система контролю і керування рухомими і стаціонарними об'єктами, що містить процесорний блок обробки інформації і синтезу команд, стільниковий телефон, що працює у стандартній мережі зв'язку GSM, вузли блокування і керування функціональними органами об'єкта, комплект гучномовного зв'язку, входи-виходи яких з'єднані з внутрішнім каналом зв'язку, виконаним у вигляді стандартної інтерфейсної шини, а також джерело живлення, яка відрізняється...
Попередній патент: Стенд для дослідження процесів при взаємодії колеса з рейкою
Наступний патент: Пристрій на повітряній подушці для переміщення і теплової обробки вантажів
Випадковий патент: Спосіб виведення стронцію з організму тварин