Спосіб регулювання оптимального режиму роботи зернозбирального комбайна
Номер патенту: 79451
Опубліковано: 25.04.2013
Автори: Аніскевич Леонід Володимирович, Захарін Фелікс Михайлович

Формула / Реферат
Спосіб регулювання оптимального режиму роботи зернозбирального комбайна, що реалізується шляхом застосування на комбайні обладнання картографування врожайності з датчиком координат глобальної системи позиціонування, механізму зміни швидкості руху зернозбирального комбайна (ЗКК), електронної картограми-завдання, що дозволяє розраховувати оптимальний швидкісний режим роботи збирального комбайна за формулою ![]() ,
,
де ![]() - оптимальна швидкість руху ЗЗК;
- оптимальна швидкість руху ЗЗК;
![]() - оптимальне (для заданого типу ЗЗК) значення інтенсивності потоку зерна в бункер;
- оптимальне (для заданого типу ЗЗК) значення інтенсивності потоку зерна в бункер;
![]() - ефективна ширина захвату жатки;
- ефективна ширина захвату жатки;
![]() - оцінка врожайності в точці поточного місцезнаходження ріжучого апарата жатки зернозбирального комбайна,
- оцінка врожайності в точці поточного місцезнаходження ріжучого апарата жатки зернозбирального комбайна,
який відрізняється тим, що до обладнання для регулювання оптимального режиму роботи зернозбирального комбайна додано блок екстраполяції, що дозволяє як оцінку ![]() на початковому етапі руху комбайна (початок першого проходу по полю) використовувати базову картограму-завдання (в реальних умовах на дистанції близько 100 метрів), а далі оцінка
на початковому етапі руху комбайна (початок першого проходу по полю) використовувати базову картограму-завдання (в реальних умовах на дистанції близько 100 метрів), а далі оцінка ![]() розраховується за результатами екстраполяції даних з рівня врожайності, накопичених на попередньому етапі руху комбайна, на точку поточного місцезнаходження ріжучого апарата (РА) жатки, а при роботі, починаючи з другого проходу (або з другого кола), оцінка
розраховується за результатами екстраполяції даних з рівня врожайності, накопичених на попередньому етапі руху комбайна, на точку поточного місцезнаходження ріжучого апарата (РА) жатки, а при роботі, починаючи з другого проходу (або з другого кола), оцінка ![]() розраховується як за результатами екстраполяції даних з врожайності, накопичених на попередньому етапі руху комбайна, так і за результатами екстраполяції даних з рівня врожайності на попередньому паралельному проході, що перенесені по перпендикулярній до лінії проходу прямій на точку поточного місцезнаходження центру ріжучого апарата (РА) жатки, що знаходиться на відстані
розраховується як за результатами екстраполяції даних з врожайності, накопичених на попередньому етапі руху комбайна, так і за результатами екстраполяції даних з рівня врожайності на попередньому паралельному проході, що перенесені по перпендикулярній до лінії проходу прямій на точку поточного місцезнаходження центру ріжучого апарата (РА) жатки, що знаходиться на відстані ![]() від попереднього паралельного проходу, причому екстраполяція здійснюється за допомогою формули
від попереднього паралельного проходу, причому екстраполяція здійснюється за допомогою формули
![]() ,
,
де ![]() та
та ![]() - вагові коефіцієнти, що налаштовуються експериментально при умові дотримання рівняння
- вагові коефіцієнти, що налаштовуються експериментально при умові дотримання рівняння ![]() ;
;
![]() - рівень врожайності на попередньому паралельному проході на лінії ріжучого апарата, що знаходиться на відстані
- рівень врожайності на попередньому паралельному проході на лінії ріжучого апарата, що знаходиться на відстані ![]() ;
;
![]() - довжина шляху, яка визначається навігаційним обладнанням, по траєкторії руху комбайна від
- довжина шляху, яка визначається навігаційним обладнанням, по траєкторії руху комбайна від ![]() точки картографування врожайності до точки поточного місцезнаходження РА жатки ЗЗК;
точки картографування врожайності до точки поточного місцезнаходження РА жатки ЗЗК;
![]() - коефіцієнти квадратичної апроксимації врожайності на ковзному інтервалі, що включає останні N точок картографування врожайності;
- коефіцієнти квадратичної апроксимації врожайності на ковзному інтервалі, що включає останні N точок картографування врожайності;
j - черговий номер точки картографування врожайності.
Текст
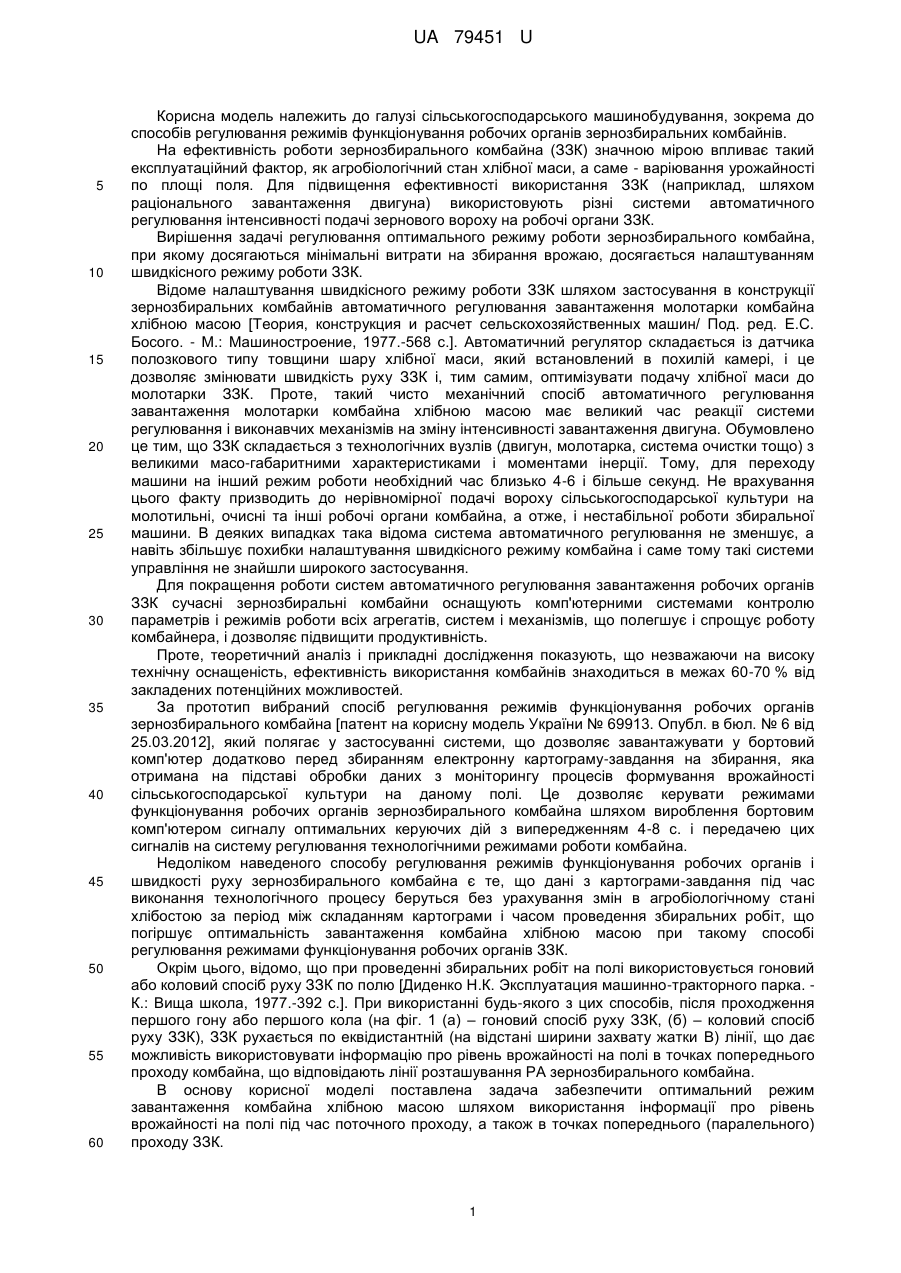
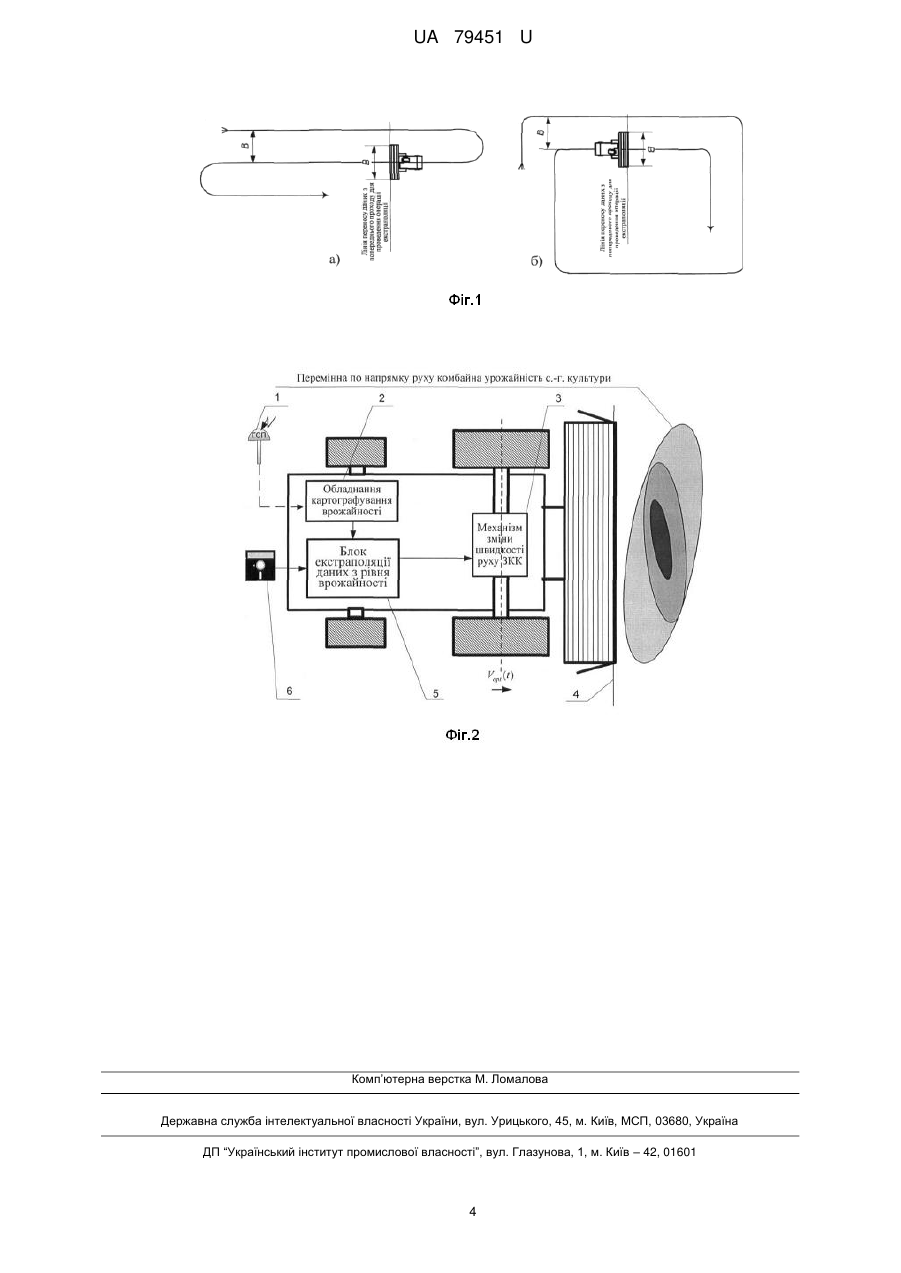
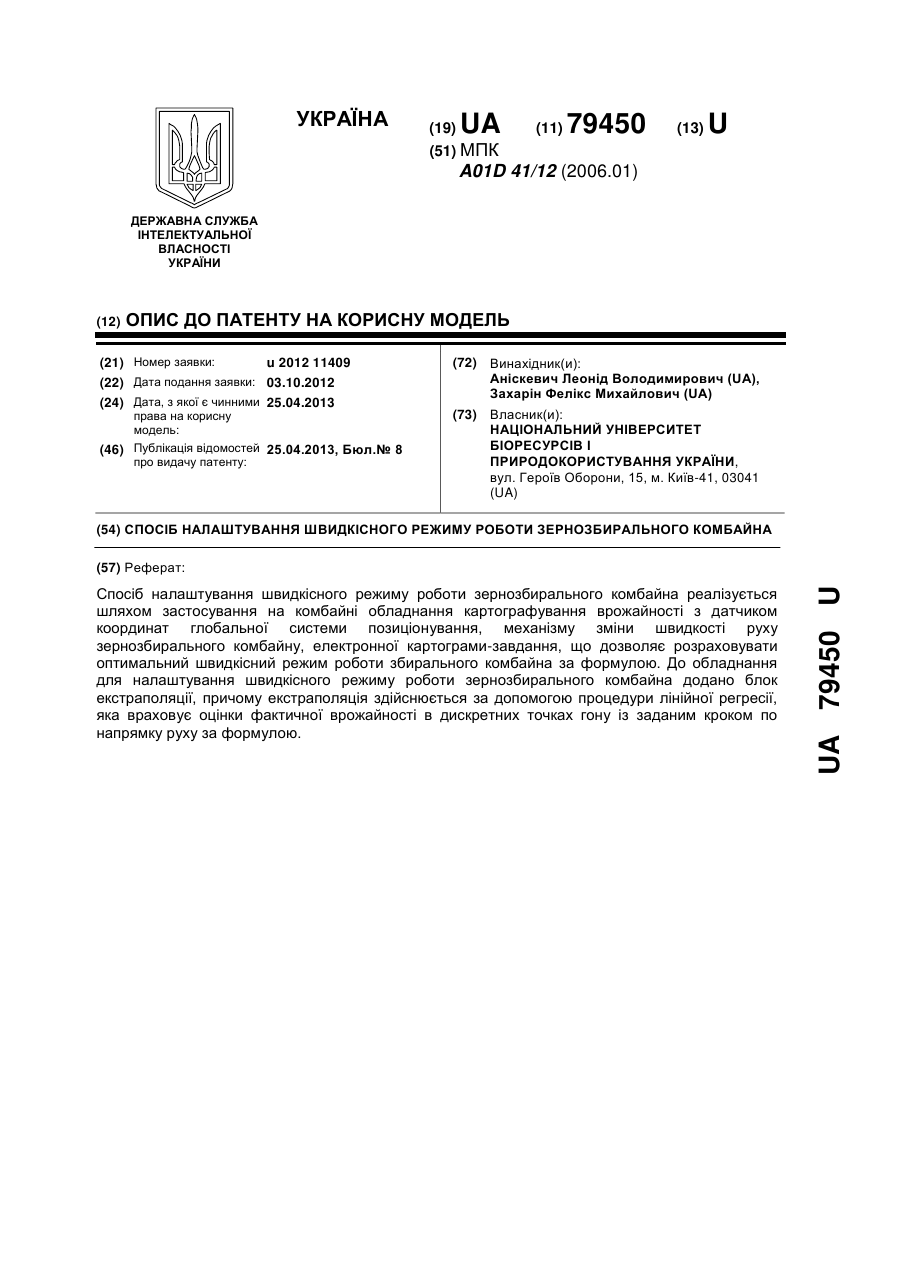
Реферат: UA 79451 U UA 79451 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі сільськогосподарського машинобудування, зокрема до способів регулювання режимів функціонування робочих органів зернозбиральних комбайнів. На ефективність роботи зернозбирального комбайна (ЗЗК) значною мірою впливає такий експлуатаційний фактор, як агробіологічний стан хлібної маси, а саме - варіювання урожайності по площі поля. Для підвищення ефективності використання ЗЗК (наприклад, шляхом раціонального завантаження двигуна) використовують різні системи автоматичного регулювання інтенсивності подачі зернового вороху на робочі органи ЗЗК. Вирішення задачі регулювання оптимального режиму роботи зернозбирального комбайна, при якому досягаються мінімальні витрати на збирання врожаю, досягається налаштуванням швидкісного режиму роботи ЗЗК. Відоме налаштування швидкісного режиму роботи ЗЗК шляхом застосування в конструкції зернозбиральних комбайнів автоматичного регулювання завантаження молотарки комбайна хлібною масою [Теория, конструкция и расчет сельскохозяйственных машин/ Под. ред. Е.С. Босого. - М.: Машиностроение, 1977.-568 с.]. Автоматичний регулятор складається із датчика полозкового типу товщини шару хлібної маси, який встановлений в похилій камері, і це дозволяє змінювати швидкість руху ЗЗК і, тим самим, оптимізувати подачу хлібної маси до молотарки ЗЗК. Проте, такий чисто механічний спосіб автоматичного регулювання завантаження молотарки комбайна хлібною масою має великий час реакції системи регулювання і виконавчих механізмів на зміну інтенсивності завантаження двигуна. Обумовлено це тим, що ЗЗК складається з технологічних вузлів (двигун, молотарка, система очистки тощо) з великими масо-габаритними характеристиками і моментами інерції. Тому, для переходу машини на інший режим роботи необхідний час близько 4-6 і більше секунд. Не врахування цього факту призводить до нерівномірної подачі вороху сільськогосподарської культури на молотильні, очисні та інші робочі органи комбайна, а отже, і нестабільної роботи збиральної машини. В деяких випадках така відома система автоматичного регулювання не зменшує, а навіть збільшує похибки налаштування швидкісного режиму комбайна і саме тому такі системи управління не знайшли широкого застосування. Для покращення роботи систем автоматичного регулювання завантаження робочих органів ЗЗК сучасні зернозбиральні комбайни оснащують комп'ютерними системами контролю параметрів і режимів роботи всіх агрегатів, систем і механізмів, що полегшує і спрощує роботу комбайнера, і дозволяє підвищити продуктивність. Проте, теоретичний аналіз і прикладні дослідження показують, що незважаючи на високу технічну оснащеність, ефективність використання комбайнів знаходиться в межах 60-70 % від закладених потенційних можливостей. За прототип вибраний спосіб регулювання режимів функціонування робочих органів зернозбирального комбайна [патент на корисну модель України № 69913. Опубл. в бюл. № 6 від 25.03.2012], який полягає у застосуванні системи, що дозволяє завантажувати у бортовий комп'ютер додатково перед збиранням електронну картограму-завдання на збирання, яка отримана на підставі обробки даних з моніторингу процесів формування врожайності сільськогосподарської культури на даному полі. Це дозволяє керувати режимами функціонування робочих органів зернозбирального комбайна шляхом вироблення бортовим комп'ютером сигналу оптимальних керуючих дій з випередженням 4-8 с. і передачею цих сигналів на систему регулювання технологічними режимами роботи комбайна. Недоліком наведеного способу регулювання режимів функціонування робочих органів і швидкості руху зернозбирального комбайна є те, що дані з картограми-завдання під час виконання технологічного процесу беруться без урахування змін в агробіологічному стані хлібостою за період між складанням картограми і часом проведення збиральних робіт, що погіршує оптимальність завантаження комбайна хлібною масою при такому способі регулювання режимами функціонування робочих органів ЗЗК. Окрім цього, відомо, що при проведенні збиральних робіт на полі використовується гоновий або коловий спосіб руху ЗЗК по полю [Диденко Н.К. Эксплуатация машинно-тракторного парка. К.: Вища школа, 1977.-392 с.]. При використанні будь-якого з цих способів, після проходження першого гону або першого кола (на фіг. 1 (а) – гоновий спосіб руху ЗЗК, (б) – коловий спосіб руху ЗЗК), ЗЗК рухається по еквідистантній (на відстані ширини захвату жатки В) лінії, що дає можливість використовувати інформацію про рівень врожайності на полі в точках попереднього проходу комбайна, що відповідають лінії розташування РА зернозбирального комбайна. В основу корисної моделі поставлена задача забезпечити оптимальний режим завантаження комбайна хлібною масою шляхом використання інформації про рівень врожайності на полі під час поточного проходу, а також в точках попереднього (паралельного) проходу ЗЗК. 1 UA 79451 U 5 Поставлена задача вирішується тим, що до обладнання для налаштування швидкісного режиму роботи зернозбирального комбайна додано блок екстраполяції даних з рівня врожайності, накопичених на попередньому паралельному проході комбайна. Це дає змогу, як і у відомому способі, в основу алгоритму регулювання оптимального режиму роботи ЗЗК покласти формулу: opt , (1) Vopt ( t ) ˆ Bq( t ) де Vopt ( t ) - оптимальна швидкість руху ЗЗК на момент часу t ; opt - оптимальне (для заданого типу ЗЗК) значення інтенсивності потоку зерна в бункер; 10 15 20 B - ефективна ширина захвату жатки; ˆ q(t ) - оцінка врожайності в точці поточного місцезнаходження ріжучого апарата (РА) жатки ЗЗК. Проте, на відміну від відомого способу регулювання режимів функціонування робочих органів зернозбирального комбайна, де як оцінки q(t ) беруться дані з базової картограмиˆ завдання, у запропонованому способі використовується блок екстраполяції даних з рівня врожайності. При цьому на початковому етапі руху комбайна (початок першого проходу по полю) використовується базова картограма-завдання (в реальних умовах на дистанції близько 100 метрів), а далі оцінка q(t ) розраховується за результатами екстраполяції, накопичених на ˆ попередньому етапі руху комбайна, даних з рівня врожайності на точку поточного місцезнаходження ріжучого апарата (РА) жатки, а при роботі, починаючи з другого проходу (або з другого кола) оцінка q(t ) розраховується, як за результатами екстраполяції даних з ˆ урожайності, накопичених на попередньому етапі руху комбайна, так і за результатами екстраполяції даних з рівня врожайності на попередньому паралельному проході, що перенесені по перпендикулярній до лінії проходу прямій на точку поточного місцезнаходження центру ріжучого апарата (РА) жатки, що знаходиться на відстані В від попереднього паралельного проходу, за допомогою формули: 2 ˆ ˆ ˆ q b1qp b 2 ai ( Lp )i , (2) i0 25 де b1 та b 2 - вагові коефіцієнти, що налаштовуються експериментально при умові дотримання рівняння b1 b2 1 ; ˆ qp - рівень врожайності на попередньому паралельному проході, що знаходиться на відстані B , у відповідності до поточної лінії РА; L p - довжина шляху, яка визначається навігаційним обладнанням, по траєкторії руху 30 35 40 45 50 комбайна від точки картографування врожайності до точки поточного j (N 1) місцезнаходження РА жатки ЗЗК; ˆ ai (i 0,12) - коефіцієнти квадратичної апроксимації врожайності на ковзному інтервалі, що , включає останні N точок картографування врожайності; j - черговий номер точки картографування врожайності. На фіг. 2 наведена блок-схема способу регулювання оптимального режиму роботи зернозбирального комбайна. Спосіб регулювання оптимального режиму роботи зернозбирального комбайна реалізується застосуванням на комбайні обладнання картографування врожайності 2 з датчиком координат глобальної системи позиціонування 1, механізму зміни швидкості руху ЗКК 3, електронної картограми-завдання 6 на виконання технологічного процесу збирання та блока 5 екстраполяції даних з врожайності, накопичених як на етапі руху комбайна по гону, так і за результатами екстраполяції даних з рівня врожайності на попередньому паралельному проході на точку поточного місцезнаходження центру ріжучого апарата жатки, що знаходиться на відстані В від попереднього паралельного проходу. Запропонований спосіб регулювання оптимального режиму роботи зернозбирального комбайна забезпечує, завдяки застосуванню блока екстраполяції 5 даних з врожайності, накопичених як на етапі руху комбайна по гону, так і на попередньому паралельному проході на точку поточного місцезнаходження центру РА жатки, розрахунок уточнених оцінок врожайності сільськогосподарської культури, які (оцінки врожайності) використовуються для оптимального налаштування режиму роботи ЗЗК за формулою (1), а екстраполяція здійснюється за 2 UA 79451 U 5 допомогою блока екстраполяції даних з використанням процедури лінійної регресії за формулою (2), яка враховує дані з врожайності, накопичених як на етапі руху комбайна по гону, так і за результатами екстраполяції даних з рівня врожайності на попередньому паралельному проході, що перенесені по перпендикулярній до лінії проходу прямій на точку поточного місцезнаходження центру ріжучого апарата жатки. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Спосіб регулювання оптимального режиму роботи зернозбирального комбайна, що реалізується шляхом застосування на комбайні обладнання картографування врожайності з датчиком координат глобальної системи позиціонування, механізму зміни швидкості руху зернозбирального комбайна (ЗЗК), електронної картограми-завдання, що дозволяє розраховувати оптимальний швидкісний режим роботи збирального комбайна за формулою opt , Vopt ( t ) ˆ Bq( t ) де Vopt ( t ) - оптимальна швидкість руху ЗЗК; opt - оптимальне (для заданого типу ЗЗК) значення інтенсивності потоку зерна в бункер; 20 25 30 B - ефективна ширина захвату жатки; ˆ q(t ) - оцінка врожайності в точці поточного місцезнаходження ріжучого апарата жатки зернозбирального комбайна, який відрізняється тим, що до обладнання для регулювання оптимального режиму роботи ˆ зернозбирального комбайна додано блок екстраполяції, що дозволяє як оцінку q(t ) на початковому етапі руху комбайна (початок першого проходу по полю) використовувати базову ˆ картограму-завдання (в реальних умовах на дистанції близько 100 метрів), а далі оцінка q(t ) розраховується за результатами екстраполяції даних з рівня врожайності, накопичених на попередньому етапі руху комбайна, на точку поточного місцезнаходження ріжучого апарата ˆ (РА) жатки, а при роботі, починаючи з другого проходу (або з другого кола), оцінка q(t ) розраховується як за результатами екстраполяції даних з врожайності, накопичених на попередньому етапі руху комбайна, так і за результатами екстраполяції даних з рівня врожайності на попередньому паралельному проході, що перенесені по перпендикулярній до лінії проходу прямій на точку поточного місцезнаходження центру ріжучого апарата (РА) жатки, що знаходиться на відстані B від попереднього паралельного проходу, причому екстраполяція здійснюється за допомогою формули 2 ˆ ˆ ˆ q b1qp b 2 ai ( L p )i , i0 35 де b1 та b 2 - вагові коефіцієнти, що налаштовуються експериментально при умові дотримання рівняння b1 b2 1; ˆ qp - рівень врожайності на попередньому паралельному проході на лінії ріжучого апарата, що знаходиться на відстані B ; L p - довжина шляху, яка визначається навігаційним обладнанням, по траєкторії руху комбайна 40 від j (N 1) точки картографування врожайності до точки поточного місцезнаходження РА жатки ЗЗК; ˆ ai (i 0,12) - коефіцієнти квадратичної апроксимації врожайності на ковзному інтервалі, що , включає останні N точок картографування врожайності; j - черговий номер точки картографування врожайності. 3 UA 79451 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for regulating the optimum operating regime of a grain combined harvester
Автори англійськоюAniskevych Leonid Volodymyrovych, Zaharin Feliks Myhaylovich
Назва патенту російськоюСпособ регулирования оптимального режима работы зерноуборочного комбайна
Автори російськоюАнискевич Леонид Владимирович, Захарин Феликс Михайлович
МПК / Мітки
МПК: A01D 41/12
Мітки: зернозбирального, режиму, оптимального, комбайна, спосіб, регулювання, роботи
Код посилання
<a href="https://ua.patents.su/6-79451-sposib-regulyuvannya-optimalnogo-rezhimu-roboti-zernozbiralnogo-kombajjna.html" target="_blank" rel="follow" title="База патентів України">Спосіб регулювання оптимального режиму роботи зернозбирального комбайна</a>
Спосіб налаштування швидкісного режиму роботи зернозбирального комбайна
Номер патенту: 79450
Опубліковано: 25.04.2013
Автори: Захарін Фелікс Михайлович, Аніскевич Леонід Володимирович
МПК: A01D 41/12
Мітки: спосіб, зернозбирального, швидкісного, комбайна, налаштування, режиму, роботи
Формула / Реферат:
Спосіб налаштування швидкісного режиму роботи зернозбирального комбайна, що реалізується шляхом застосування на комбайні обладнання картографування врожайності з датчиком координат глобальної системи позиціонування, механізму зміни швидкості руху зернозбирального комбайну (ЗКК), електронної картограми-завдання, що дозволяє розраховувати оптимальний швидкісний режим роботи збирального комбайна за формулою
Спосіб регулювання режимів функціонування робочих органів зернозбирального комбайна
Номер патенту: 69913
Опубліковано: 25.05.2012
Автори: Войтюк Дмитро Григорович, Аніскевич Леонід Володимирович, Смолінський Станіслав Вікторович
МПК: A01D 41/12
Мітки: органів, регулювання, спосіб, робочих, зернозбирального, комбайна, функціонування, режимів
Формула / Реферат:
Спосіб регулювання режимів функціонування робочих органів зернозбирального комбайна, що містить систему контролю і регулювання технологічних режимів роботи, обладнання супутникової глобальної системи позиціонування, бортовий комп'ютер, який відрізняється тим, що в бортовий комп'ютер додатково перед збиранням завантажується електронна картограма-завдання на збирання, яку отримують на підставі обробітку даних з моніторингу процесів формування...
Спосіб автоматичного регулювання завантаження зернозбирального комбайна
Номер патенту: 67447
Опубліковано: 27.02.2012
Автори: Бісюк Віктор Анатолійович, Дідик Олександр Костянтинович, Осадчий Сергій Іванович, Віхрова Лариса Григорівна, Мірошниченко Марія Сергіївна
МПК: A01D 41/12
Мітки: завантаження, автоматичного, спосіб, зернозбирального, комбайна, регулювання
Формула / Реферат:
Спосіб автоматичного регулювання завантаження зернозбирального комбайна, що включає керування поступальною швидкістю комбайна за сигналом різниці відношень частоти обертання молотильного барабана до частоти обертання вала двигуна, виміряних в ручному та автоматичному режимах, який відрізняється тим, що з метою підвищення точності регулювання враховують не лише знак різниці відношень частот обертання молотильного барабана та вала двигуна, а й...
Жатка-молотарка зернозбирального комбайна
Номер патенту: 71177
Опубліковано: 15.11.2004
Автор: Щерба Микола Іванович
МПК: A01D 41/00
Мітки: комбайна, зернозбирального, жатка-молотарка
Формула / Реферат:
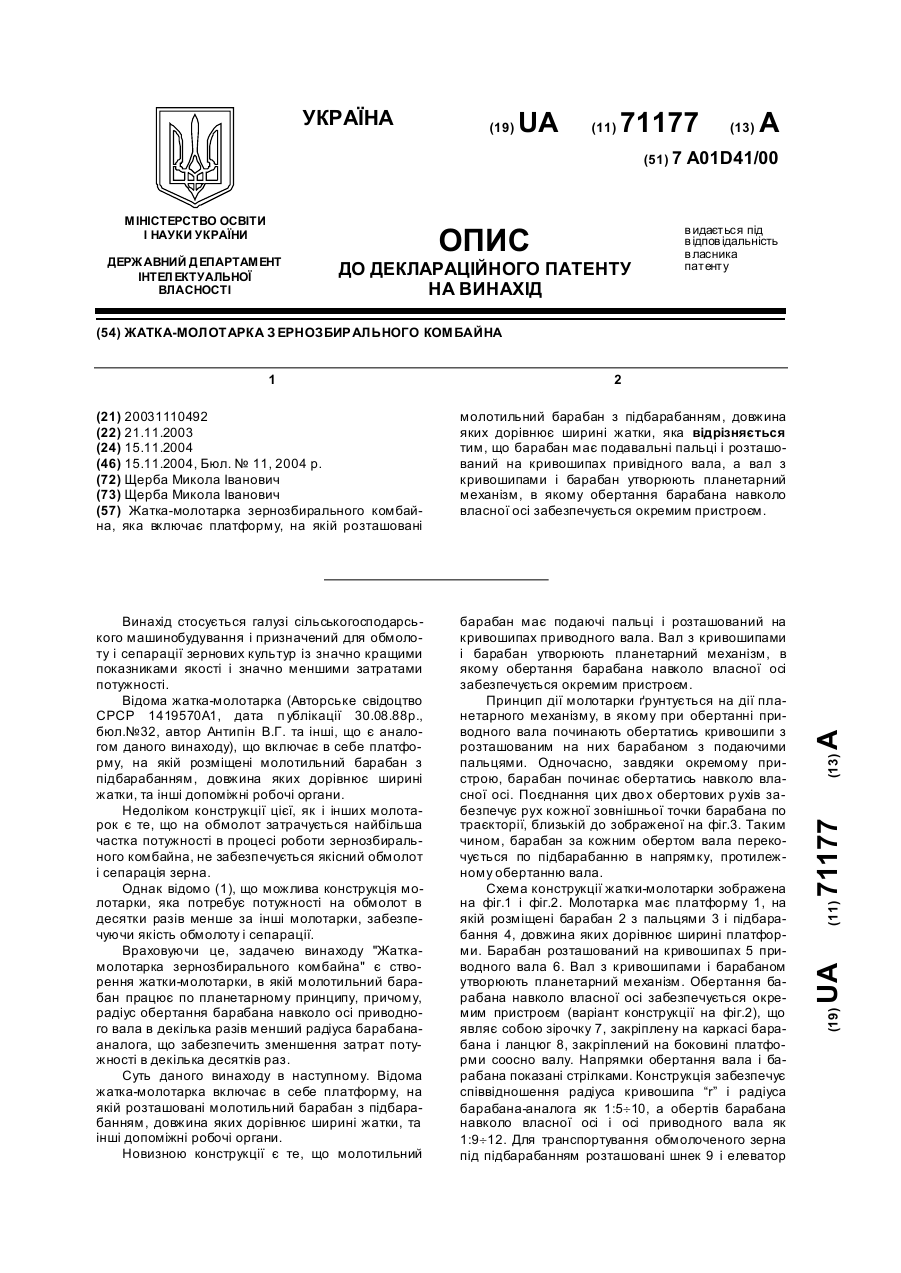
Жатка-молотарка зернозбирального комбайна, яка включає платформу, на якій розташовані молотильний барабан з підбарабанням, довжина яких дорівнює ширині жатки, яка відрізняється тим, що барабан має подавальні пальці і розташований на кривошипах привідного вала, а вал з кривошипами і барабан утворюють планетарний механізм, в якому обертання барабана навколо власної осі забезпечується окремим пристроєм.
Навісний подрібнювач стебельчатих продуктів до зернозбирального комбайна
Номер патенту: 60831
Опубліковано: 25.06.2011
Автори: ПАВЛЮКОВИЧ ВАЛЕРІЯ ІГОРЕВНА, Шаповалов Віктор Іванович
МПК: A01F 12/40
Мітки: зернозбирального, продуктів, стебельчатих, комбайна, подрібнювач, навісний
Формула / Реферат:
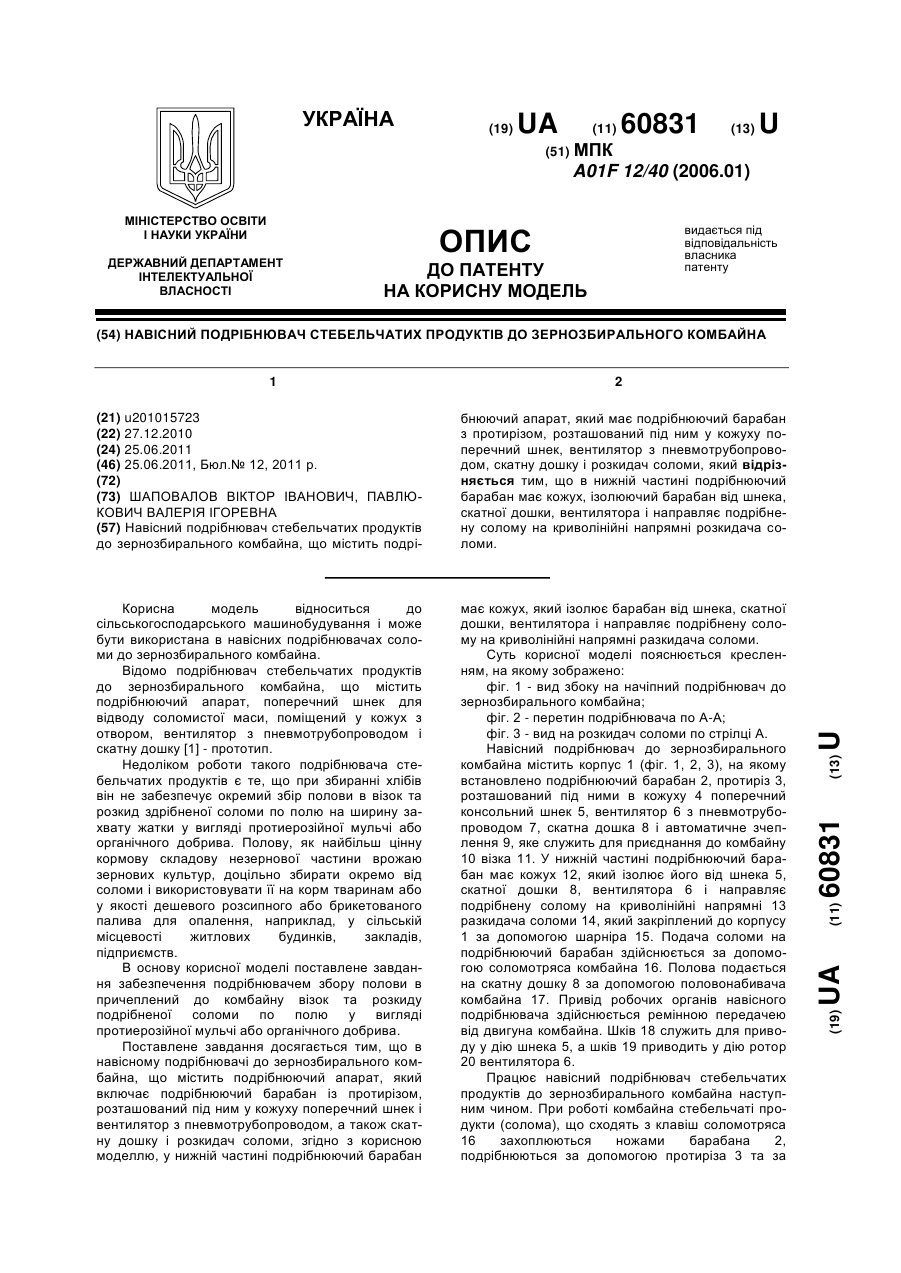
Навісний подрібнювач стебельчатих продуктів до зернозбирального комбайна, що містить подрібнюючий апарат, який має подрібнюючий барабан з протирізом, розташований під ним у кожуху поперечний шнек, вентилятор з пневмотрубопроводом, скатну дошку і розкидач соломи, який відрізняється тим, що в нижній частині подрібнюючий барабан має кожух, ізолюючий барабан від шнека, скатної дошки, вентилятора i направляє подрібнену солому на криволінійні...
Попередній патент: Спосіб налаштування швидкісного режиму роботи зернозбирального комбайна
Наступний патент: Пристрій для забезпечення взуття від ковзання
Випадковий патент: Спосіб лікування дифтерії