Система векторного керування асинхронним двигуном
Номер патенту: 79969
Опубліковано: 13.05.2013
Формула / Реферат
Система векторного керування асинхронним двигуном, яка синтезована в координатній системі d,q,0, використовує прямий та квадратурний канали регулювання, значення потокозчеплення та швидкості визначаються за допомогою відповідних блоків із значень струмів та напруг статора, яка відрізняється тим, що враховуються втрати у сталі шляхом введення в систему спостерігача стану за індуктивністю контуру намагнічування Lμ, спостерігач визначає Lμ з залежності Lμ=f(IμΣ), де за струм намагнічування IμΣ приймається струм прямого каналу Id, уточнене значення Lμ використовується в адаптивних регуляторах та для уточнення розрахунку кутової швидкості двигуна, додатково застосовується фільтр сигналу кутової швидкості, який встановлений після блока розрахунку кутової швидкості.
Текст
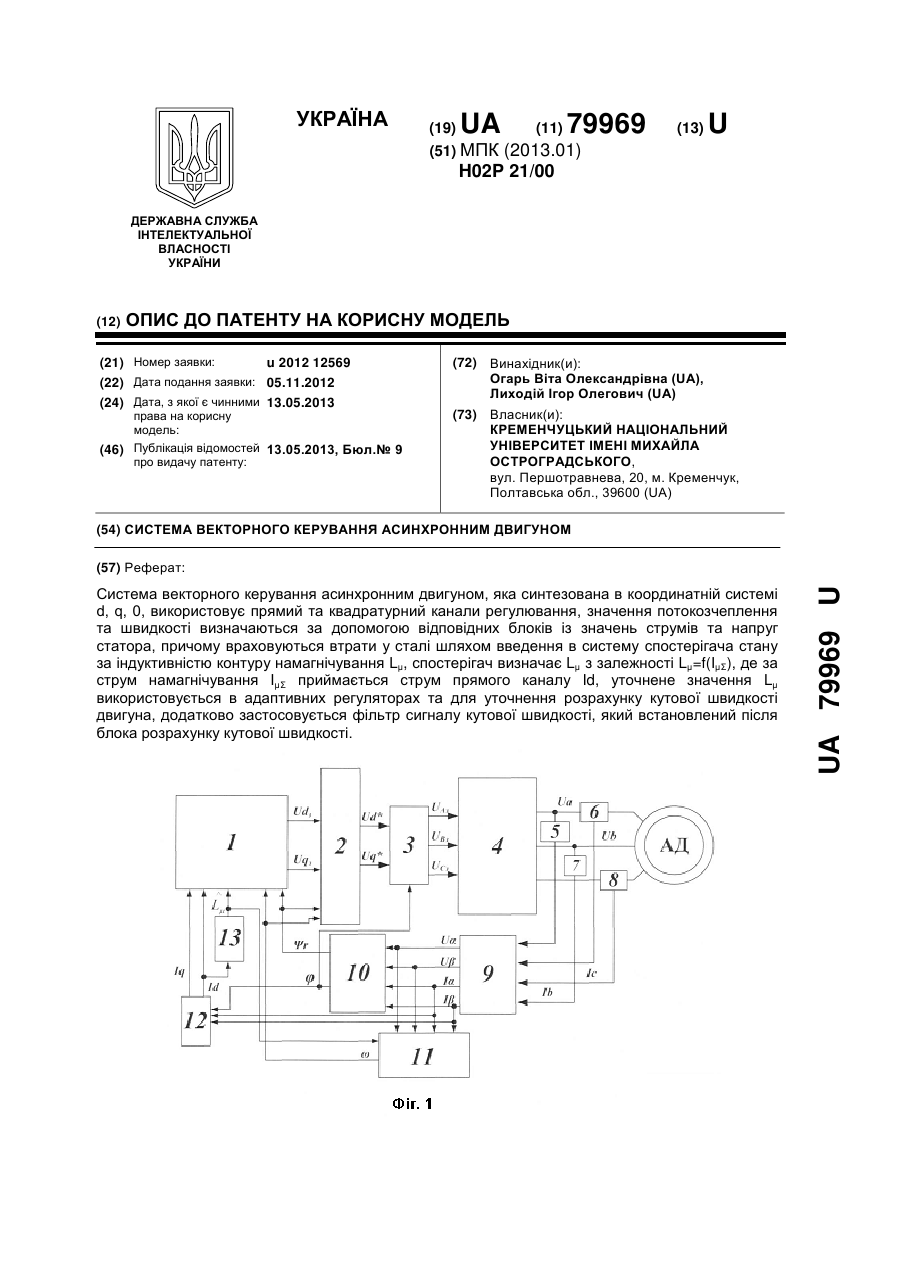
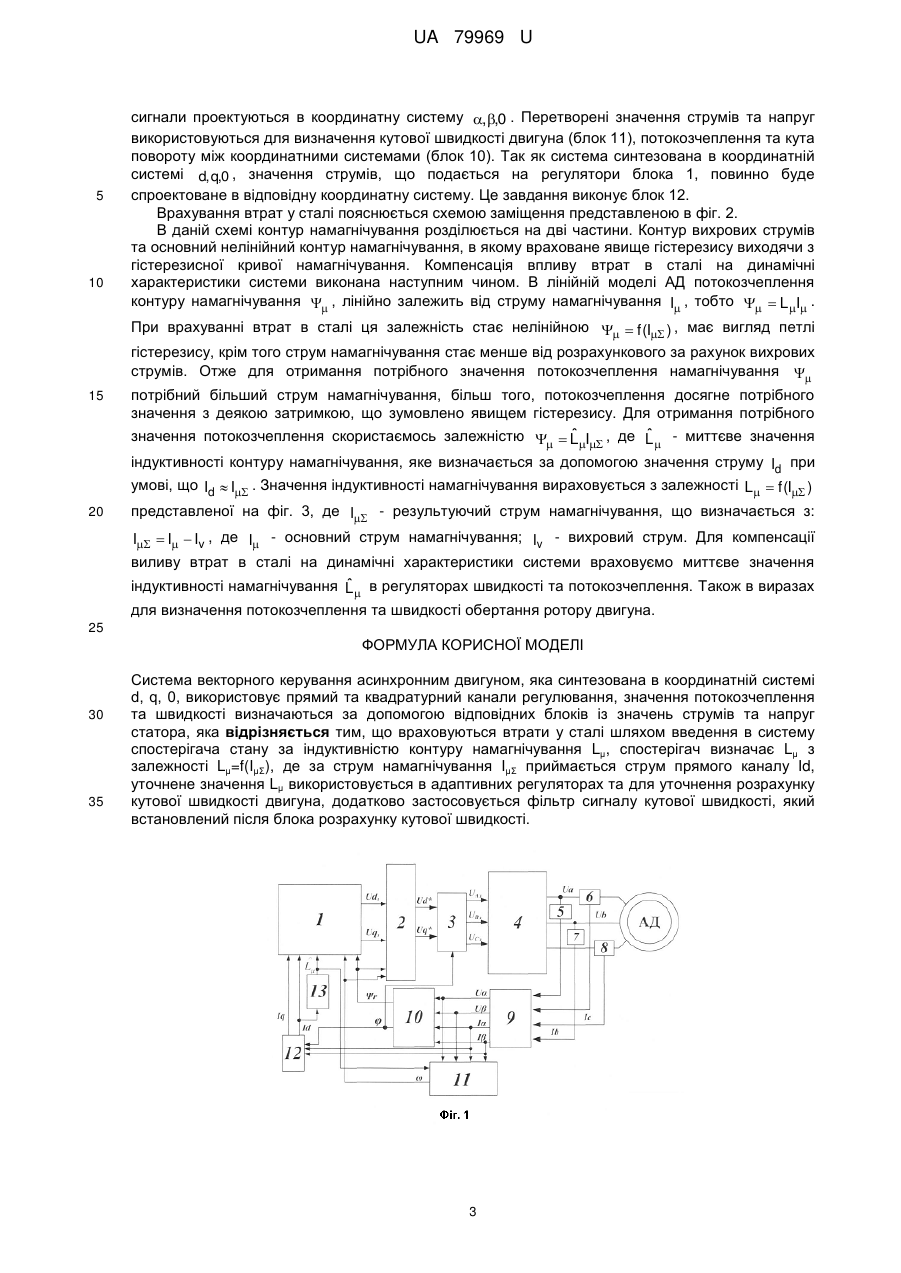
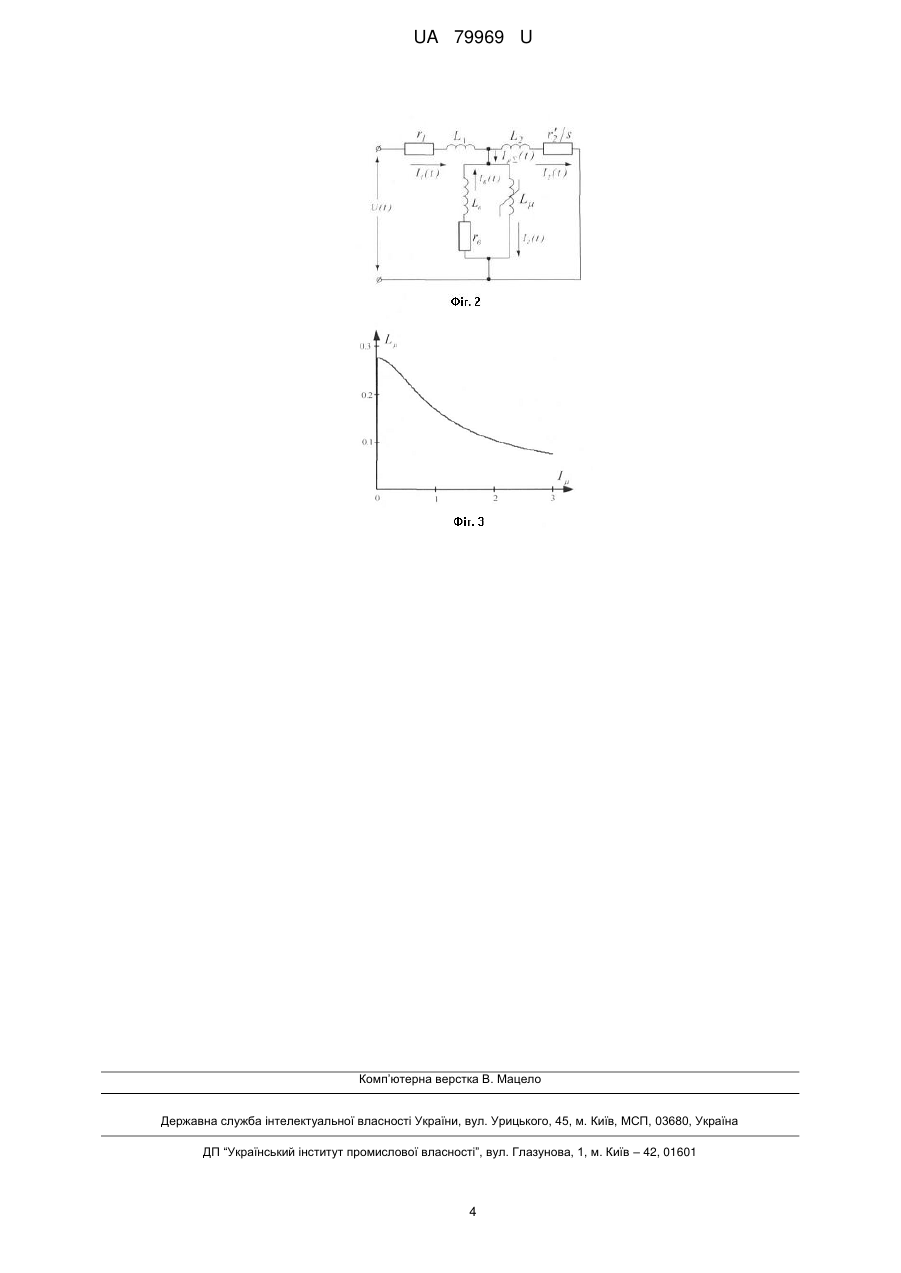
Реферат: UA 79969 U UA 79969 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі систем автоматичного управління електроприводами змінного струму і може бути використана для частотного регулювання швидкості асинхронного двигуна (AД). Аналогом заявленої системи є система підпорядкованого керування [Системы подчиненного регулирования электроприводов переменного тока с вентильными преобразователями. О.В. Слежановский, JI.X. Дацковский. И.С. Кузнецов и др. - М.: Энергоатомиздат.], яка містить два основні контури: контур регулювання потокозчеплення ротора и контур регулювання швидкості. Перший контур підтримує постійність потокозчеплення ротора, другий постійність швидкості обертання. Кожен контур складається із двох регуляторів швидкості (потоку) та підлеглих їм регуляторів струму. Для визначення потокозчеплення використовується датчики потоку, вбудовані в АД та датчик швидкості, що під'єднується до валу двигуна. Даний підхід підвищує точність регулювання, але є досить незручним, так як технологія монтажу датчиків потоку в АД є досить складною. Також збільшує кількість частин, що обертаються (датчик швидкості), а це в свою чергу зменшую надійність всієї системи. Суттєві ознаки, що збігаються з заявленою системою: синтезована в обертовій координатній системі d, q,0 , що орієнтована за вектором потокозчеплення ротора; використання прямого та квадратурного каналів регулювання, що підтримують постійність вектору потокозчеплення ротора та кутової швидкості двигуна. Відома система векторного керування електроприводом змінного струму [Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием: учебник для студ. высш. учебн. зав. Г.Г. Соколовский. - М.: Академия, 2006. - 272 с], яка базується на взаємодії наступних функціональних складових: перетворювача частоти (ПЧ), з ланкою постійного струму; швидкодіючих струмових контурів, виконаних в нерухомій координатній системі , , блоку струмів та напруг з нерухомої координатної системи , в обертову систему d, q , яка передбачає застосування контурів струмів за осями d та q каналів регулювання потокозчеплення та швидкості ( i1d та i1q ); перетворювачів координат прямого та зворотного каналів (ПКП і ПКЗ), які визначаються перетворенням Парка. Для отримання в перетворенні координат кута - кута між віссю "" нерухомої системи координат і віссю " d" системи, що обертається, у систему вводиться блок визначення модуля потокозчеплення ротора r . Для визначення кутової швидкості використовується блок, який визначає величину кутової швидкості за різницею частоти обертання поля статора та частоти роторної ЕРС. Для того, щоб забезпечити незалежне керування потокозчепленням і швидкістю ротора, та виключити взаємний вплив проекцій струмів статора, вводиться блок компенсації (БК) перехресних зв'язків. Недоліком такої системи є те, що вона не враховує зміну індуктивності контуру намагнічування та підвищення струму намагнічування за рахунок негативного впливу втрат в сталі. Останні чинять суттєвий вплив на динамічні характеристики бездатчикової системи векторного керування АД. Суттєві ознаки, що збігаються з заявленою системою: синтезована в обертовій координатній системі d, q,0 , що орієнтована за вектором потокозчеплення ротора; використання прямого та квадратурного каналів регулювання, що підтримують постійність вектору потокозчеплення ротора та кутової швидкості двигуна; використання блоків визначення потокозчеплення ротора та кутової швидкості. Дана система вибрана за прототип корисної моделі, що заявляється. Задачею даної корисної моделі є підвищення якості регулювання системи векторного керування АД за рахунок урахування негативного впливу втрат у сталі. Поставлена задача вирішується шляхом введення у систему векторного керування АД адаптивних регуляторів потоку та швидкості, які адаптуються за уточненим значенням індуктивності контуру намагнічування, що визначається за допомогою спостерігача стану цієї величини. Також значення цієї індуктивності використовується при визначенні швидкості обертання ротора. Корисна модель дозволяє покращити характеристики струмів, моменту на валу та кутової швидкості двигуна при пуску, суттєво знизити коливання моменту в усталеному режимі, зменшити статичну похибку регулювання швидкості на 0,6 % при номінальній швидкості обертання та на 6,6 % при низькій швидкості обертання (10 рад/с). Корисна модель пояснюється кресленнями, де на фігурі 1 зображена блок-схема системи, на якійприйняті такі позначення: 1 - блок регуляторів; 2 - блок компенсації перехресних зв'язків; 1 UA 79969 U 5 3 - блок перетворення координат із d, q,0 у A,B, C ; 4 - автономний інвертор напруги; 5, 6 датчики напруги; 7, 8 - датчики струму; 9 - блок перетворення координат із A,B, C у ,,0 ; 10 блок визначення вектора потокозчеплення ротора та кута його повороту; 11 - блок визначення кутової швидкості двигуна; 12 - блок перетворення координат з ,,0 в d, q,0 ; 13 - спостерігач стану за індуктивністю контуру намагнічування. На фігурі 2 зображена схема заміщення АД, на якій прийняті такі позначення: r1 , r '2 , rв - активний опір статора, приведений активний опір ротора та активний опір контуру вихрових струмів відповідно; L1 , L 2 , L в , L - індуктивності статора, ротора, контуру вихрових струмів та контуру намагнічування відповідно. На фігурі 3 зображено залежність індуктивності контуру намагнічування L від струму намагнічування I . 10 15 Система синтезована за принципом підпорядкованого регулювання (фіг. 1). Система має 2 канали регулювання прямий та квадратурний з регуляторами синтезованими в координатній системі d, q,0 . Прямий канал складається з регулятора потокозчеплення та підпорядкованого йому регулятора прямого струму Id . Вхідним сигналом керування є різниця сигналів завдання та реального значення потокозчеплення що визначається в блоці 10 за наступними залежностями: r r2 r2 ; r di us R sis Lr s dt ; di us R sis L r s ; dt де r - проекція вектора потокозчеплення на вісь нерухомої системи координат , r проекція вектора потокозчеплення на вісь нерухомої системи координат, us та us - проекції r 20 1 Lr ˆ P L 1 Lr ˆ P L векторів напруг на відповідні осі, is та is - проекції векторів струмів на відповідні осі, R s ˆ активний опір статора, L r - індуктивність ротора, L - уточнене значення індуктивності контуру 25 30 35 намагнічування, - коефіцієнт розсіювання. Різниця вихідною сигналу регулятора потокозчеплення та реальне значення струму Id (отриманого за допомогою датчиків струму та блока перетворення координат) є вхідним сигналом для регулятора струму прямого каналу. Квадратурний канал складається з двох регуляторів: швидкості та підпорядкованого йому регулятора прямого струму Id . Працює за тим же принципом, що і прямий канал. Значення кутової швидкості визначається за допомогою відповідного блоку 11 структура якого така ж як і в прототипі, єдиною відмінністю є використання уточненого значення індуктивності контуру намагнічування, що вираховується за допомогою блока 13. Також в блоці 11 встановлений фільтр з передаточною функцією: Wf 1 , що зменшує реагування системи на Tf p 1 високочастотні стрибки швидкості та збільшує її стійкість. Всі регулятори розташовані в блоці 1, мають пропорційно-інтегральну структуру та такі передаточні функції: L s Rs k WPC (p) k p i ; k p ; ki ; p 2TKCk Пk c 2TKCk Пk c WPШ (p) k p WP (p) k ep 40 k i JL r k c JL r k c ; k p ; k i ; 2 ˆ ˆ p 3ZpL k ш Т кш 12 ZpL k ш Т кш k ei k c Tr k c ; k ep ; k ei . ˆ ˆ p 2TKEL max 2TKEL max Виходи з регуляторів струму подаються до блока компенсації перехресних зв'язків 2, який запобігає впливу одного каналу на інший. Далі сигнали подаються до блоку перетворення координат із d, q,0 у A,B, C 3. З блоку 3 виходять сигнали завдання фазних напруг, що керують трифазним інвертором напруги 4, від якого живиться АД. Значення струмів та напруг знімаються за допомогою відповідних датчиків 5, 6, 7, 8. За допомогою блока перетворення координат 9 ці 2 UA 79969 U 5 10 15 сигнали проектуються в координатну систему ,,0 . Перетворені значення струмів та напруг використовуються для визначення кутової швидкості двигуна (блок 11), потокозчеплення та кута повороту між координатними системами (блок 10). Так як система синтезована в координатній системі d, q,0 , значення струмів, що подається на регулятори блока 1, повинно буде спроектоване в відповідну координатну систему. Це завдання виконує блок 12. Врахування втрат у сталі пояснюється схемою заміщення представленою в фіг. 2. В даній схемі контур намагнічування розділюється на дві частини. Контур вихрових струмів та основний нелінійний контур намагнічування, в якому враховане явище гістерезису виходячи з гістерезисної кривої намагнічування. Компенсація впливу втрат в сталі на динамічні характеристики системи виконана наступним чином. В лінійній моделі АД потокозчеплення контуру намагнічування , лінійно залежить від струму намагнічування I , тобто L I . При врахуванні втрат в сталі ця залежність стає нелінійною f (I ) , має вигляд петлі гістерезису, крім того струм намагнічування стає менше від розрахункового за рахунок вихрових струмів. Отже для отримання потрібного значення потокозчеплення намагнічування потрібний більший струм намагнічування, більш того, потокозчеплення досягне потрібного значення з деякою затримкою, що зумовлено явищем гістерезису. Для отримання потрібного ˆ ˆ значення потокозчеплення скористаємось залежністю L I , де L - миттєве значення індуктивності контуру намагнічування, яке визначається за допомогою значення струму Id при умові, що Id I . Значення індуктивності намагнічування вираховується з залежності L f (I ) 20 представленої на фіг. 3, де I - результуючий струм намагнічування, що визначається з: I I Iv , де I - основний струм намагнічування; Iv - вихровий струм. Для компенсації виливу втрат в сталі на динамічні характеристики системи враховуємо миттєве значення ˆ індуктивності намагнічування L в регуляторах швидкості та потокозчеплення. Також в виразах для визначення потокозчеплення та швидкості обертання ротору двигуна. 25 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 Система векторного керування асинхронним двигуном, яка синтезована в координатній системі d, q, 0, використовує прямий та квадратурний канали регулювання, значення потокозчеплення та швидкості визначаються за допомогою відповідних блоків із значень струмів та напруг статора, яка відрізняється тим, що враховуються втрати у сталі шляхом введення в систему спостерігача стану за індуктивністю контуру намагнічування Lμ, спостерігач визначає Lμ з залежності Lμ=f(IμΣ), де за струм намагнічування IμΣ приймається струм прямого каналу Id, уточнене значення Lμ використовується в адаптивних регуляторах та для уточнення розрахунку кутової швидкості двигуна, додатково застосовується фільтр сигналу кутової швидкості, який встановлений після блока розрахунку кутової швидкості. 3 UA 79969 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюAsynchronous motor vector control system
Автори англійськоюOhar Vita Oleksandrivna, Lykhodii Ihor Olehovych
Назва патенту російськоюСистема векторного управления асинхронным двигателем
Автори російськоюОгарь Вита Александровна, Лиходий Игорь Олегович
МПК / Мітки
МПК: H02P 21/00
Мітки: векторного, система, асинхронним, керування, двигуном
Код посилання
<a href="https://ua.patents.su/6-79969-sistema-vektornogo-keruvannya-asinkhronnim-dvigunom.html" target="_blank" rel="follow" title="База патентів України">Система векторного керування асинхронним двигуном</a>
Спосіб керування асинхронним двигуном та електропривід, що його реалізує
Номер патенту: 31656
Опубліковано: 15.12.2000
Автор: Михайлюта Сергій Леонтійович
МПК: H02P 27/04, H02P 7/00
Мітки: асинхронним, керування, електропривід, спосіб, двигуном, реалізує
Текст:
...для забезпечення мінімального стру , статора, реактивна складова струну статора нае підтримуватись пропорційн активній складовій. На фіг Л зображена крива зміни моменту асинхронного двигуна 4A100L4 одержана в результаті моделювання, при зміні співвідношення складових стрn чиї запропонований спосіб керування асинхронним двнгуном дозволяє забезпечнт високі динамічні властивості електроприводу та мінімальне споживання струм від...
Спосіб адаптивного частотного керування асинхронним двигуном
Номер патенту: 68806
Опубліковано: 10.04.2012
Автори: Луцик Ірина Богданівна, Іскерський Іван Станіславович, Рутило Микола Іванович, Петрикович Юрій Ярославович, Федорейко Валерій Степанович
МПК: H02P 1/26
Мітки: асинхронним, керування, частотного, спосіб, адаптивного, двигуном
Формула / Реферат:
Спосіб адаптивного частотного керування асинхронним електродвигуном, що забезпечує енергоефективне його регулювання шляхом формування оптимальної величини напруги статора, який відрізняється тим, що ця величина розраховується за відхиленням напруги, яке пропорційне різниці активної і реактивної складових потужності електродвигуна, в залежності від його механічного навантаження.
Спосіб керування асинхронним двигуном та пристрій для його реалізації
Номер патенту: 62097
Опубліковано: 15.12.2003
Автори: Чорний Олексій Петрович, Сичов Сергій Дмитрович, Родькін Дмитро Йосипович
МПК: G01R 31/34
Мітки: спосіб, асинхронним, реалізації, керування, пристрій, двигуном
Формула / Реферат:
1. Спосіб керування асинхронним двигуном, що включає підключення асинхронного двигуна через перетворювач напруги до джерела промислової частоти, вимірювання миттєвих значень напруги та струму статорного ланцюга та розрахунок моменту двигуна, який відрізняється тим, що за даними вимірів розраховують миттєву потужність та момент двигуна, вилучають змінну складову моменту та подають на регулятор системи імпульсно-фазового керування тиристорним...
Пристрій керування асинхронним вентильним двигуном
Номер патенту: 80161
Опубліковано: 27.08.2007
Автори: Епштейн Ісаак Ізраілевич, Кохан Павло Степанович, Хоменко Олександр Андрійович
МПК: H02P 29/00, H02K 29/00
Мітки: вентильним, керування, пристрій, двигуном, асинхронним
Формула / Реферат:
Пристрій керування асинхронним вентильним двигуном, підключений до трифазної живильної мережі, який має трифазний мережний вимикач, перші клеми якого з'єднані з відповідними фазами трифазної живильної мережі, асинхронний вентильний двигун, датчик швидкості обертання ротора, що з'єднаний з ротором асинхронного вентильного двигуна, задатчик швидкості обертання, блок керування, до третього і четвертого входів якого підключені виходи відповідно...
Спосіб керування асинхронним двигуном при важкому рушанні та пристрій для його реалізації
Номер патенту: 84176
Опубліковано: 25.09.2008
Автори: Конох Ігор Сергійович, Романенко Катерина Георгіївна, Гладир Андрій Іванович, Гомілко Володимир Іванович, Хребтова Оксана Анатоліївна, Ємець Валерій Васильович
МПК: H02P 1/00
Мітки: спосіб, важкому, двигуном, рушанні, керування, реалізації, пристрій, асинхронним
Формула / Реферат:
1. Спосіб керування асинхронним двигуном при важкому рушанні, що полягає в підключенні асинхронного двигуна до трифазної мережі через перетворювач частоти, формуванні протягом часу t = tT електромагнітного моменту двигуна у функції часу з поступовим збільшенням до значення МП0, що дорівнює пусковому моменту двигуна, контролі процесу запуску впродовж часу t = tB шляхом обчислення ковзання s за миттєвими значеннями струму та напруги статора,...
Попередній патент: Спосіб підвищення продукції антибіотиків моеноміцинового ряду
Наступний патент: Спосіб лікування плямистої форми системної гіпоплазії емалі у дітей на етапі незавершеної мінералізації емалі постійних зубів
Випадковий патент: Система стабілізованого підвісу магнітолевітуючого транспортного засобу