Двопараметровий диференціатор неелектричних сигналів
Номер патенту: 81409
Опубліковано: 25.06.2013
Автори: Божок Аркадій Михайлович, Понеділок Вадим Віталійович
Формула / Реферат
Двопараметровий диференціатор неелектричних сигналів, що містить підсумовуючий механізм, два сильфони, з'єднані один з одним торцями рухомим фланцем і установлені в напрямній, і один вузол приймання вхідних сигналів, зв'язаний через дросель з першим сильфоном і через рухомий фланець з другим сильфоном за допомогою гнучкого шланга, другий торець другого сильфона з'єднаний з другим рухомим фланцем, який відрізняється тим, що в ньому додатково установлений третій сильфон і спільний нерухомий порожнистий фланець, з яким зв'язаний один торець третього сильфона і другий торець другого сильфона, а підсумовуючий механізм, виконаний у вигляді сильфона, розміщеного усередині третього сильфона в напрямній втулці і з'єднаного одним торцем з другим рухомим фланцем третього сильфона, а другим торцем - із спільним рухомим фланцем першого і другого сильфонів, а також додатково установлений другий вузол приймання вхідних сигналів, при цьому перший сильфон з'єднаний з другим вузлом приймання вхідних сигналів сильфоном через дросель, а другий і третій сильфони - за допомогою жорстких гідроліній і другого спільного нерухомого порожнистого фланця.
Текст
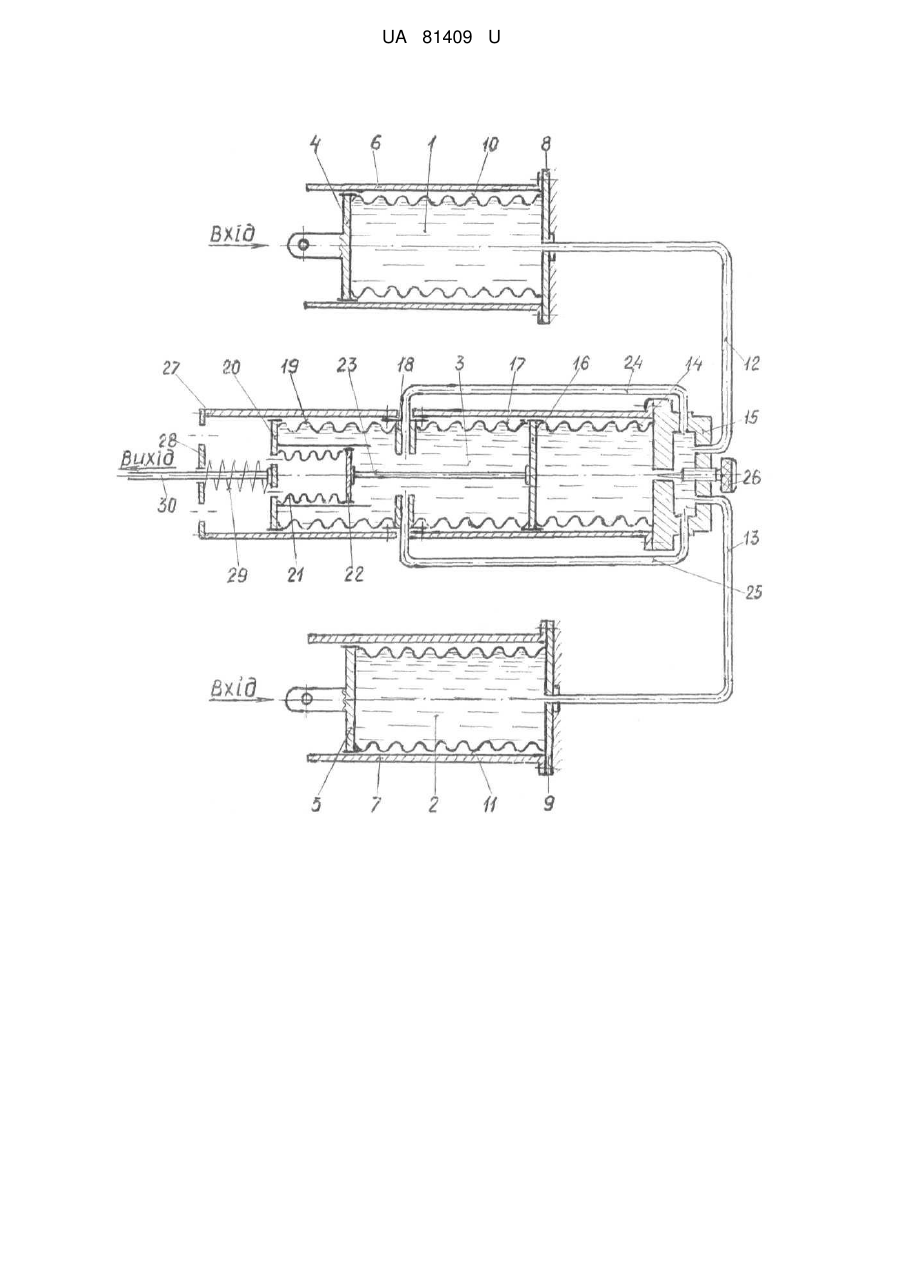
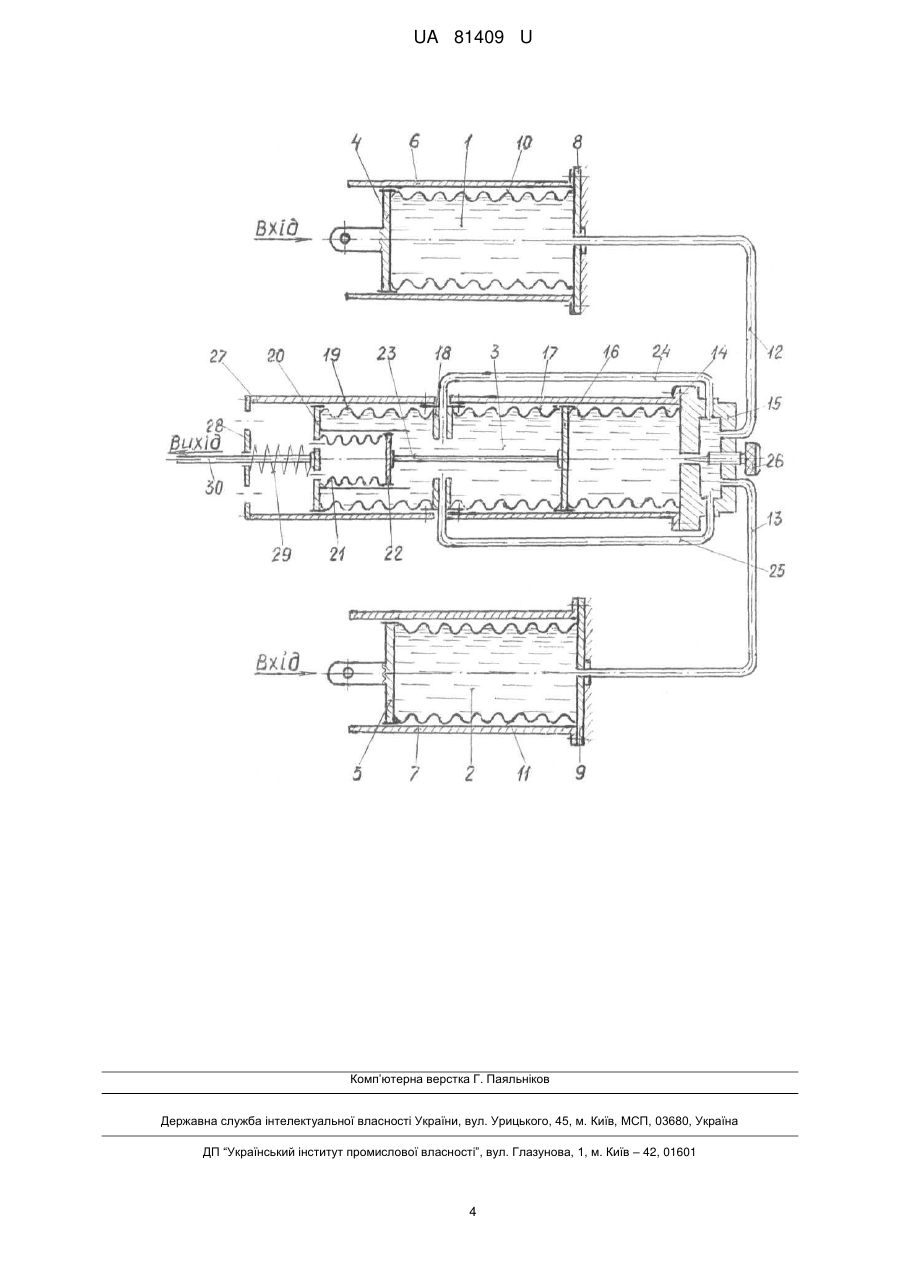
Реферат: Двопараметровий диференціатор неелектричних сигналів містить підсумовуючий механізм, два сильфони, з'єднані один з одним торцями рухомим фланцем і установлені в напрямній, і один вузол приймання вхідних сигналів, зв'язаний через дросель з першим сильфоном і через рухомий фланець з другим сильфоном за допомогою гнучкого шланга. Другий торець другого сильфона з'єднаний з другим рухомим фланцем. Додатково установлений третій сильфон і спільний нерухомий порожнистий фланець, з яким зв'язаний один торець третього сильфона і другий торець другого сильфона. Підсумовуючий механізм виконаний у вигляді сильфона, розміщеного усередині третього сильфона в напрямній втулці і з'єднаного одним торцем з другим рухомим фланцем третього сильфона, а другим торцем - із спільним рухомим фланцем першого і другого сильфонів. Додатково установлений другий вузол приймання вхідних сигналів, при цьому перший сильфон з'єднаний з другим вузлом приймання вхідних сигналів сильфоном через дросель, а другий і третій сильфони - за допомогою жорстких гідроліній і другого спільного нерухомого порожнистого фланця. UA 81409 U (54) ДВОПАРАМЕТРОВИЙ ДИФЕРЕНЦІАТОР НЕЕЛЕКТРИЧНИХ СИГНАЛІВ UA 81409 U UA 81409 U 5 10 15 20 25 30 35 40 45 50 55 60 Диференціатор належить до засобів автоматики і може бути використаний в механічних, гідравлічних і пневматичних установках систем автоматичного керування (САК) і регулювання (CAP). Відомий, найбільш близький за технічною суттю до заявленого є, диференціатор, що містить два сильфона, з'єднаних між собою рухомим фланцем, і вузол приймання вхідних сигналів, зв'язаний з першим сильфоном та через дросель і рухомий фланець з другим сильфоном за допомогою гнучкого шланга. Другий торець другого сильфона через другий рухомий фланець з'єднаний з підсумовуючим механізмом, зв'язаним з виходом пристрою [див. авторське свідоцтво СРСР № 469973, 1973]. Однак, недоліком відомого пристрою є складна конструкція підсумовуючого механізму у вигляді важеля, обмежені функціональні можливості і область застосування, обумовлені диференціюванням тільки одного неелектричного сигналу. Тому в основу винаходу поставлено задачу спрощення конструкції, а також розширення функціональних можливостей і області застосування диференціатора. З метою спрощення конструкції та розширення функціональних можливостей і області застосування пропонується його удосконалення, суттєві ознаки якого полягають в тому, що диференціюються і гідравлічно підсумовуються на виході одночасно два незалежних неелектричних сигнали. Для розв'язання даної задачі в ньому додатково установлений третій сильфон і другий спільний нерухомий порожнистий фланець, з яким зв'язаний один торець третього сильфона і другий торець другого сильфона. Підсумовуючий механізм виконаний у вигляді сильфона розміщеного усередині третього сильфона в напрямній втулці і з'єднаного одним торцем з другим рухомим фланцем третього сильфона, а другим торцем - із спільним рухомим фланцем першого і другого сильфонів. Додатково установлений другий вузол приймання вхідних сигналів, при цьому перший сильфон з'єднаний з другим вузлом приймання вхідних сигналів через дросель, а другий і третій сильфони - за допомогою жорстких гідроліній і другого спільного нерухомого порожнистого фланця. Таке технічне рішення дасть можливість створити диференціатор для диференціювання двох незалежних неелектричних сигналів. Він складається з двох паралельно з'єднаних вузлів приймання вхідних сигналів, одного їх перетворювача і одного гідравлічного підсумовуючого механізму вихідних сигналів, що забезпечить компактність і спростить конструкцію при досягненні результату, одним запропонованим, замість відомих двох окремих пристроїв. Можливість подачі одного або двох корегуючих сигналів на виконавчі механізми підвищить точність функціонування САК і CAP, а також розширить область їх застосування в системах автоматики неелектричного типу. На представленому кресленні схематично показано загальний вигляд запропонованого двопараметрового диференціатора неелектричних сигналів. Запропонований диференціатор включає вузли 1, 2 приймальних вхідних сигналів і їх перетворювач 3. Вузли 1, 2 містять рухомі фланці 4, 5, що переміщуються в циліндричних напрямних 6, 7, жорстко зв'язаних з нерухомими фланцями 8, 9 сильфонів 10, 11, порожнини яких гідролініями 12, 13 сполучаються з розподільчою порожниною гідравлічного перетворювача 3. Перетворювач 3 включає перший виконавчий сильфон 14, один торець якого зв'язаний з нерухомим фланцем 15, а другий торець із спільним рухомим фланцем 16. До фланця 16 одним торцем приєднаний другий виконавчий сильфон 17, протилежний торець якого зв'язаний з нерухомим порожнистим фланцем 18. До фланця 18 з другого боку приєднаний одним торцем третій виконавчий сильфон 19, протилежний торець якого з'єднаний з другим рухомим фланцем 20. До цього ж фланця приєднаний одним торцем диференціюючий сильфон 21, другий торець якого зв'язаний з рухомим фланцем 22. Фланець 22 жорсткою тягою 23 з'єднаний з рухомим фланцем 16. Порожнина диференціатора, утворена фланцями 16, 18, 20, а також сильфонами 17, 19, 20, сполучається з розподілювальною порожниною фланця 15 гідролініями 24, 25 безпосередньо, а порожнина, утворена фланцями 15, 16 і сильфоном 14, через голчастий дросель 26. Рухомі фланці 16, 20 переміщуються в нерухомій циліндричній напрямній 27, до якої приєднаний з отворами фланець 28, який являється сідлом відновлювальної пружини 29. З протилежного боку пружина впирається у фланець 20, забезпечуючи, таким чином, повернення його і зв'язану з ним вихідну тягу 30, у вихідне положення. Крім того, пружина 29 використовується для усунення механічного гістерезису матеріалів стінок сильфонів 10, 11 вузлів приймання вхідних сигналів, а також виконавчих 14, 17, 19 і диференціюю чого 21 сильфонів. 1 UA 81409 U 5 10 15 20 25 30 35 40 45 50 55 60 Працює двопараметровий диференціатор наступним чином. При різкому збільшенні вхідного сигналу приймального вузла 1 (переміщенні рухомого фланця 4) і незмінному вхідному сигналі приймального вузла 2 (нерухомому фланці 5) через наявність дроселя 26 тиск у сильфоні 14 буде наростати повільніше ніж у другому 17 і третьому 19 сильфонах перетворювача 3. В результаті фланець 16 переміститься вправо і перемістить за собою фланець 22 сильфона 21, створюючи додатковий приріст тиску робочої рідини в сильфонах 17, 19. При цьому фланець 20 третього сильфона 19, зв'язаний з тягою 30 вихідного сигналу одержить додаткове переміщення. В результаті відбудеться додавання двох переміщень, тобто вихідний сигнал диференціатора, при дії одного (першого) вхідного сигналу, буде складатися із переміщення, викликаного змінюванням вхідного сигналу, (переміщення фланця 4 і збільшення через те тиску у сильфонах 17, 19) і переміщення, викликаного швидкістю (першою похідною) (переміщення фланця 22) і додатковим збільшенням через це тиску в сильфонах 17, 19. У випадку різкого звільнення рухомого фланця 4 сильфона 1 описаний диференціатор буде працювати аналогічно з тією лише різницею, що вихідні переміщення рухомих фланців і зв'язаних з ними деталей направлені в протилежний бік. В цих випадках диференціатор буде працювати як підсилювально-диференціююча однопараметрова динамічна ланка. При різкому збільшенні вхідного сигналу приймального вузла 2 (переміщенні рухомого фланця 5) і незмінному вхідному сигналі приймального вузла 1 (нерухомому фланці 4) через наявність дроселя 22 тиск у сильфоні 14 буде наростати повільніше ніж у другому 17 і третьому 19 сильфонах перетворювача 3 і далі диференціатор працюватиме аналогічно вищеописаному випадку, забезпечуючи вихідній тязі 30 переміщення, викликане змінюванням вхідного сигналу і переміщення, викликаного швидкістю змінювання вхідного сигналу. У випадку різкого звільнення рухомого фланця 5 диференціатор буде працювати аналогічно як при різкому звільненні рухомого фланця 4. В усіх розглянутих як при окремо збільшенні, так і при окремо зменшенні вхідних сигналів приймальних вузлів 1, 2, запропонований диференціатор буде працювати як підсилювальнодиференціююча ланка. При одночасному різкому збільшенні вхідного сигналу приймального вузла 1 (переміщення рухомого фланця 4) і вхідного сигналу приймального вузла 2 (переміщення рухомого фланця 5) через наявність дроселя 26 тиск у сильфоні 14 буде наростати повільніше ніж у другому 17 і третьому 19 сильфонах. При цьому фланець переміститься відносно на більшу відстань і перемістить за собою на більшу відстань фланець 22 сильфона 21, створюючи більшу величину додаткового приросту тиску робочої рідини в сильфонах 17, 19. Фланець 20 третього сильфона 19 і вихідна тяга 30 одержать також більшу величину додаткового переміщення, яке буде складатися уже з чотирьох переміщень, обумовлених змінюванням обох вхідних сигналів і викликаних: - першого - змінюванням вхідного сигналу вузла 1; - другого - швидкістю вхідного сигналу вузла 1; - третього - змінюванням вхідного сигналу вузла 2; - четвертого - швидкістю вхідного сигналу вузла 2. У випадку різкого звільнення (зменшення вхідних сигналів) рухомих фланців 4, 5 сильфонів 10, 11 диференціатор буде працювати аналогічно збільшенню його вхідних сигналів, а вихідні переміщення рухомих фланців і деталей з ними зв'язаних будуть направлені в протилежний бік. В обох випадках диференціатор працюватиме як підсилювально-диференціююча двопараметрова динамічна ланка. У випадку повільного змінювання вхідних сигналів вузлів 1, 2, або одночасного їх змінювання, тиск робочої рідини в сильфонах 10, 11 також буде змінюватися повільно і перепад тисків у сильфонах 14, 17, 19 практично буде відсутній. При цьому рухомі фланці 16, 20, 22 будуть переміщатися з однаковою швидкістю. В результаті тяга 30 буде переміщатися і передавати вихідний сигнал, викликаний тільки змінюванням одного або двох вхідних сигналів. В цьому випадку запропонований диференціатор буде працювати як одно- і двопідсилювальна динамічна ланка. Таким чином, запропонований диференціатор за своїми функціональними можливостями являє собою одно- і двопідсилювально-диференціюючу динамічну ланку. Застосування запропонованого диференціатора, порівняно з уже відомим, дасть можливість: - спростити конструкцію, зменшити габаритні розміри і створити більш компактним диференціатор за рахунок заміни важільного підсумовуючого механізму на гідравлічний сильфонний; розширити функціональні можливості завдяки підсиленню, диференціюванню і підсумуванню одночасно сигналів двох незалежних параметрів; 2 UA 81409 U - підвищити точність функціонування САК і САР за рахунок формування і одночасної подачі на виконавчий орган корегуючих сигналів по двох параметрах; - розширити область застосування переважно на об'єктах САК і CAP, які працюють за принципами відхилення і збурення. 5 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 Двопараметровий диференціатор неелектричних сигналів, що містить підсумовуючий механізм, два сильфони, з'єднані один з одним торцями, рухомим фланцем і установлені в напрямній, і один вузол приймання вхідних сигналів, зв'язаний через дросель з першим сильфоном і через рухомий фланець з другим сильфоном за допомогою гнучкого шланга, другий торець другого сильфона з'єднаний з другим рухомим фланцем, який відрізняється тим, що в ньому додатково установлений третій сильфон і спільний нерухомий порожнистий фланець, з яким зв'язаний один торець третього сильфона і другий торець другого сильфона, а підсумовуючий механізм, виконаний у вигляді сильфона, розміщеного усередині третього сильфона в напрямній втулці і з'єднаного одним торцем з другим рухомим фланцем третього сильфона, а другим торцем - із спільним рухомим фланцем першого і другого сильфонів, а також додатково установлений другий вузол приймання вхідних сигналів, при цьому перший сильфон з'єднаний з другим вузлом приймання вхідних сигналів сильфоном через дросель, а другий і третій сильфони - за допомогою жорстких гідроліній і другого спільного нерухомого порожнистого фланця. 3 UA 81409 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюTwo-parameter differentiator of nonelectric signals
Автори англійськоюBozhok Arkadii Mykhailovych, Ponedilok Vadym Vitaliiovych
Назва патенту російськоюДвухпараметровый дифференциатор неэлектрических сигналов
Автори російськоюБожок Аркадий Михайлович, Понедилок Вадим Витальевич
МПК / Мітки
МПК: G06G 5/00
Мітки: двопараметровий, диференціатор, неелектричних, сигналів
Код посилання
<a href="https://ua.patents.su/6-81409-dvoparametrovijj-diferenciator-neelektrichnikh-signaliv.html" target="_blank" rel="follow" title="База патентів України">Двопараметровий диференціатор неелектричних сигналів</a>
Диференціатор неелектричних сигналів
Номер патенту: 51414
Опубліковано: 12.07.2010
Автори: Понеділок Володимир Францович, Божок Аркадій Михайлович
МПК: G06G 5/00
Мітки: диференціатор, неелектричних, сигналів
Формула / Реферат:
Диференціатор неелектричних сигналів, що містить два сильфони, з'єднані один з одним торцями основним спільним рухомим фланцем і встановлені в напрямній, вузол прийому вхідних сигналів, зв'язаний через дросель з першим сильфоном і через рухомий фланець - з другим сильфоном за допомогою гнучкого шланга, другий торець другого сильфона з'єднаний з другим рухомим фланцем, підсумовуючий механізм, виконаний у вигляді сильфона в напрямній втулці і...
Інтегро-диференціатор неелектричних сигналів
Номер патенту: 51744
Опубліковано: 26.07.2010
Автори: Понеділок Володимир Францович, Божок Аркадій Михайлович
МПК: G06C 5/00
Мітки: інтегро-диференціатор, сигналів, неелектричних
Формула / Реферат:
Інтегро-диференціатор неелектричних сигналів, що містить вузол приймання вхідних сигналів, дросель і перетворювач, складений із двох співвісних сильфонів, суміжні торці яких з'єднані з рухомим фланцем і встановлені в напрямній, і підсумовуючого механізму, зв'язаного з одним із протилежних торців співвісних сильфонів і рухомим фланцем, причому вихідна ланка підсумовуючого механізму є виходом інтегро-диференціатора, який відрізняється тим, що...
Диференціатор гідропневмомеханічних сигналів
Номер патенту: 62175
Опубліковано: 10.08.2011
Автори: Божок Аркадій Михайлович, Понеділок Вадим Віталійович
МПК: G05B 11/00
Мітки: гідропневмомеханічних, диференціатор, сигналів
Формула / Реферат:
Диференціатор гідропневмомеханічних сигналів, що містить підсумовуючий механізм у вигляді важеля з вихідною тягою, вузол приймання вхідних сигналів, з'єднаний через дросель з першим сильфоном і безпосередньо - з другим сильфоном через фланець, зв'язаний тягою з одним із кінців підсумовуючого важеля, а перший і другий сильфони і вузол приймання вхідних сигналів розміщені в окремих циліндричних напрямних втулках, жорстко зв'язаних з нерухомими...
Диференціатор теплових сигналів
Номер патенту: 67286
Опубліковано: 10.02.2012
Автор: Божок Аркадій Михайлович
МПК: G06G 5/00
Мітки: диференціатор, теплових, сигналів
Формула / Реферат:
Диференціатор теплових сигналів, що містить перетворювач, виконаний у вигляді двох сильфонів, з'єднаних одними торцями і спільним рухомим фланцем, другий торець першого сильфона зв'язаний з нерухомим фланцем, а другий торець другого сильфона - з рухомим фланцем, і установлених в напрямній, підсумовуючий механізм, виконаний у вигляді сильфона з фланцем, з'єднаним із спільним рухомим фланцем, розміщеного усередині другого сильфона,...
Диференціатор сигналів систем автоматики неелектричного типу
Номер патенту: 31153
Опубліковано: 25.03.2008
Автори: Божок Аркадій Михайлович, Понеділок Вадим Віталійович
Мітки: систем, автоматики, неелектричного, диференціатор, сигналів, типу
Формула / Реферат:
Диференціатор сигналів систем автоматики неелектричного типу, що містить підсумовуючий важіль, вузол приймання вхідних сигналів, з'єднаний через дросель з першим сильфоном перетворювача і безпосередньо - з другим сильфоном, жорстко з'єднаним з першим сильфоном через фланець, зв'язаний тягою з одним із кінців підсумовуючого важеля, а сильфони перетворювача і вузла приймання вхідних сигналів розміщені в циліндричних напрямних втулках, жорстко...
Попередній патент: Барабан моталки для холодної прокатки штаби
Наступний патент: Пристрій для створення високого тиску
Випадковий патент: Спосіб закриття кишкової нориці у дітей