Поплавець для сигналізаторів та регуляторів
Номер патенту: 84353
Опубліковано: 25.10.2013
Автори: Хлопенко Анна Юріївна, Дубовець Олексій Миколайович, Бовдуй Вікторія Валеріївна
Формула / Реферат
Поплавець для сигналізаторів та регуляторів, що має циліндричну форму і з'єднаний за допомогою осі, закріпленої на поплавці, і важеля, закріпленого на осі, зі стаціонарною віссю, який відрізняється тим, що в центрах верхнього й нижнього днищ поплавця виконані отвори, у яких закріплені патрубки, перший з яких забезпечує зв'язок внутрішньої порожнини поплавця з атмосферою, другий герметично і співвісно з'єднує внутрішню порожнину поплавця із мембранною камерою, розташованою під поплавцем, мембранна камера складається з кільцевого корпусу, бічні стінки якого герметично закриті гумовими мембранами, при цьому загальна внутрішня порожнина поплавця і мембранної камери заповнена рідиною до межі, при якій рідина займає (0,30-0,35)% внутрішнього обсягу поплавця, а обсяги поплавця й мембранної камери і їх маси вибрані так, щоб збільшення обсягу зануреної в рідину частини поплавця при зміні щільності контрольованого середовища дорівнювало збільшенню обсягу мембранної камери з протилежним знаком - дотримувалася умова ![]() ,
,
де ![]() - зміна глибини занурення поплавця при зміні щільності рідкого середовища;
- зміна глибини занурення поплавця при зміні щільності рідкого середовища;
![]() - площа поперечного перерізу поплавця;
- площа поперечного перерізу поплавця;
![]() - середня величина прогину мембрани мембранної камери при зміні щільності рідкого середовища;
- середня величина прогину мембрани мембранної камери при зміні щільності рідкого середовища;
![]() - площа мембрани мембранної камери.
- площа мембрани мембранної камери.
Текст
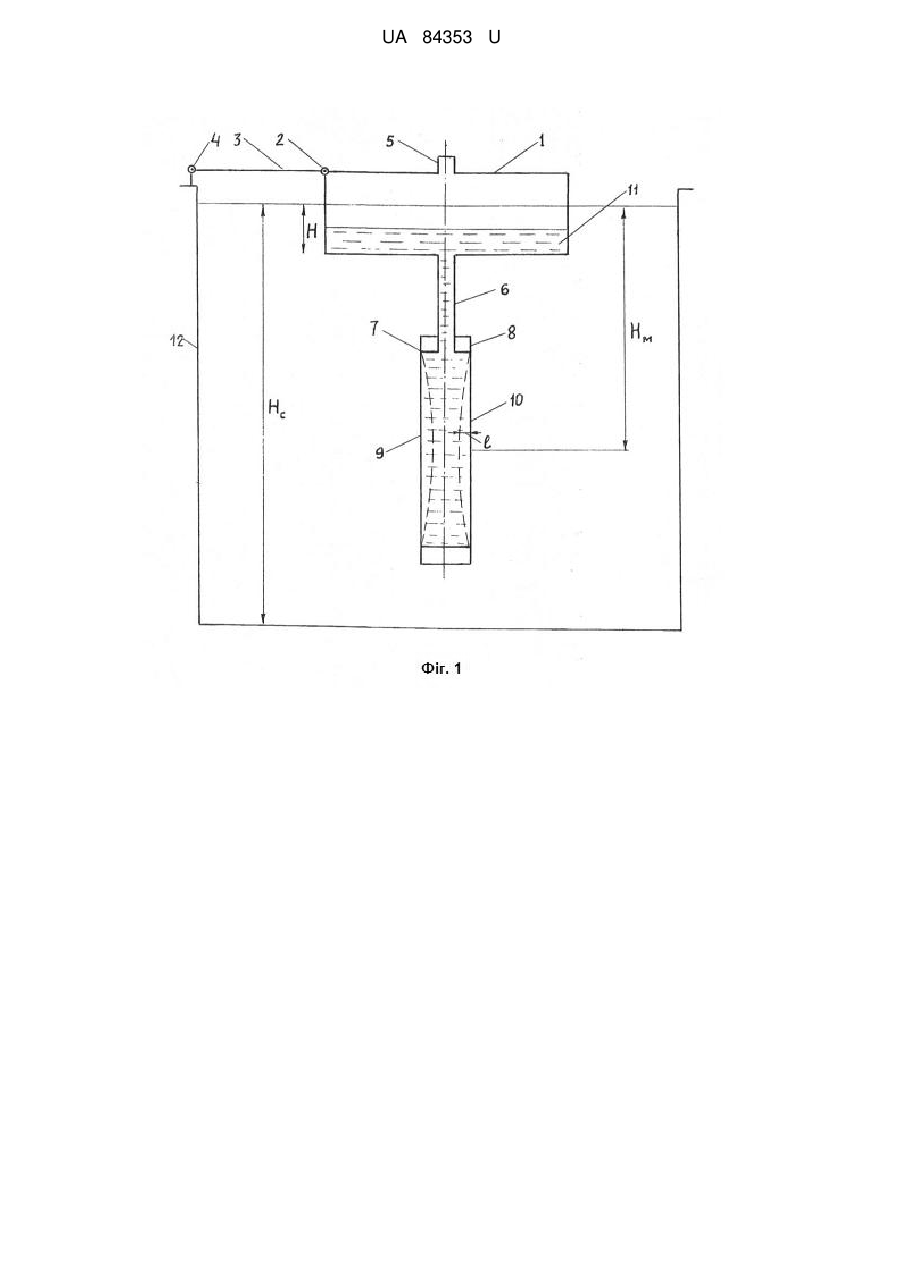
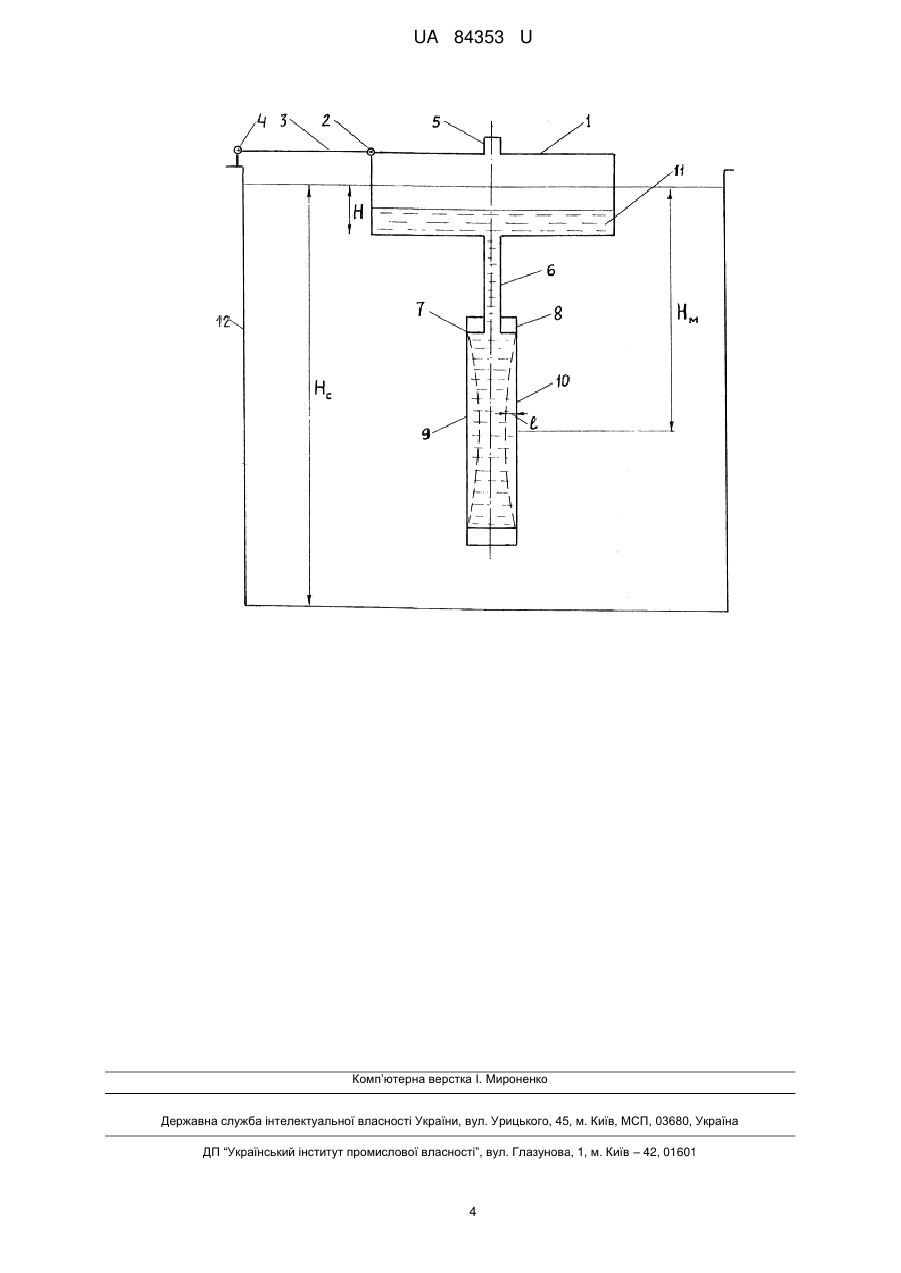
Реферат: UA 84353 U UA 84353 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до вимірювальної (що сигналізує й регулює) техніки й може використовуватися в різних галузях промисловості для виміру, сигналізації й регулювання рівня рідких середовищ із різною та змінною щільністю. Відомий чутливий елемент рівнеміра (сигналізатора, регулятора) - поплавець, виконаний у вигляді циліндричного тіла зі зміщеним центром ваги в нижню половину поплавця й у бік від його осі [1]. Недоліками відомого поплавця є: - часткове усунення погрішності виміру рівня від зміни щільності рідкого середовища; - наявність діапазонів корекції рівня при зміні щільності, на кожний з яких поплавець необхідно набудовувати; - неможливість використання в системах автоматичного виміру, сигналізації й регулювання при широкому діапазоні зміни щільності рідкого середовища. Найбільш близьким по технічній суті та результатам, що й досягаються, є чутливий елемент - поплавець, що містить циліндричний корпус, який за допомогою важеля й осі, закріпленої на корпусі поплавця, з'єднаний зі стаціонарною віссю з можливістю переміщення поплавця у вертикальному напрямку і його повороту по й проти годинникової стрілки, профільовану ємність, частково заповнену рідиною, установлену між вертикальними сторонами П-подібного кронштейна, жорстко закріпленого на зовнішній стороні поплавця, при цьому профільована ємність установлена з можливістю вертикального, горизонтального й кутового переміщення за допомогою затискних елементів, які стягають вертикальні пластини кронштейна й опору [2]. Недоліками відомого поплавця для рівнемірів є: - неможливість установки на поплавці елементів систем передачі інформації на відстань (установки, наприклад, на поплавці плунжера індуктивного або диференційнотрансформаторного датчиків або їх котушок); - залежність кута нахилу поплавця від зміни щільності контрольованого середовища (кут нахилу збільшується зі збільшенням щільності), що ускладнює відстеження його положення фотометричною системою при значних змінах щільності контрольованого рідкого середовища; - обмеженість використання (внаслідок змінності й нестабільності рівня рідини в профільованій ємності, особливо при різких змінах щільності досліджуваного середовища в технологічному об'єкті) у системах регулювання й сигналізації рівня рідких середовищ. Задачею корисної моделі є усунення або гранична мінімізація перерахованих недоліків прототипу. Поставлена задача вирішується тим, що поплавець містить циліндричний корпус, закріплений за допомогою важеля й осі, установленої на поплавці зі стаціонарною віссю з можливістю переміщення поплавця у вертикальному напрямку і його повороту по й проти годинникової стрілки, профільовану ємність, частково заповнену рідиною, установлену між вертикальними сторонами П-подібного кронштейна, закріпленого на верхній кришці поплавця з можливістю вертикального, горизонтального й кутового переміщення за допомогою затискних елементів, що стягають вертикальні пластини кронштейна й стопорну опору, а відповідно до корисної моделі в центрах верхнього й нижнього днищ поплавця виконані отвори, у яких закріплені патрубки, перший з яких забезпечує зв'язок внутрішньої порожнини поплавця з атмосферою, другий герметично й співвісно з'єднує внутрішню порожнину поплавця із мембранною камерою, розташованою під поплавцем, мембранна камера складається з кільцевого корпусу, бічні стінки якого герметично закриті гумовими мембранами, при цьому загальна внутрішня порожнина поплавця й мембранної камери заповнена рідиною до межі, при якій рідина займає (0,30-0,35) % внутрішнього обсягу поплавця, а обсяги поплавця й мембранної камери і їх маси вибрані так, щоб збільшення обсягу зануреної в рідину частини поплавця при зміні щільності контрольованого середовища дорівнювало збільшенню обсягу мембранної камери із протилежним знаком - дотримувалася умова H SПП 2SM , де H - зміна глибини занурення поплавця при зміні щільності рідкого середовища; SПП - площа поперечного перерізу поплавця; - середня величина прогину мембрани мембранної камери при зміні щільності рідкого середовища; SM - площа мембрани мембранної камери. 55 Схема пропонованого поплавця для виміру, сигналізації й регулювання рівня рідкого середовища представлена на кресленні. Поплавець 1 за допомогою осі 2, закріпленої на поплавці, й важеля 3, закріпленого на осі 2, з'єднано зі стаціонарною віссю 4, що забезпечує переміщення поплавця у вертикальному 1 UA84353 U 5 10 15 20 напрямку при зміні рівня рідини в технологічному об'єкті. У центрах верхнього й нижнього днищ поплавця 1 закріплені патрубки 5 і 6, перший 5 для забезпечення зв'язку внутрішньої порожнини поплавця 1 з атмосферою, другий 6 - для з'єднання поплавця з мембранною камерою 7, що полягає з кільцевого корпуса 8, бічні стінки якого закриті мембранами 9, 10 і забезпечення зв'язку внутрішніх порожнин поплавця й мембранної камери. Загальна внутрішня порожнина поплавця 1 і мембранної камери 7 заповнена рідиною 11 так, щоб рідина займала (0,30-0,35) % обсягу поплавця. При цьому внутрішні обсяги поплавця 1, корпуса мембранної камери 8 і площі мембран 9 і 10 вибрані так, що збільшення обсягу зануреної частини поплавця 1 при зміні щільності контрольованого середовища було дорівнювало збільшенню обсягу мембранної камери 7 (за рахунок прогину мембран) із протилежним знаком H SПП 2SM , де H - зміна глибини занурення поплавця при зміні щільності рідкого середовища; SПП - площа поперечного перерізу поплавця; - середня величина прогину мембрани мембранної камери при зміні щільності рідкого середовища; SM - площа мембрани мембранної камери. Поплавець 1 установлено в ємності 12, у якій регулюється й сигналізується граничний верхній рівень Нс рідкого середовища, що безупинно надходить, й випливає з ємності. Робота поплавця, здійснюється відповідно до формули PAp.1 VПП VПТ VПГ g G (1) що описує умову плавання поплавця 1 на поверхні рідкого середовища, P де Ap. 1 - сила, що виштовхує, діє на поплавець 1 і мембранну камеру 7; VПП - обсяг зануреного в рідке середовище поплавця; 25 30 VПТ - обсяг патрубка 6, що з'єднує внутрішні порожнини поплавця й мембранної камери; VПГ - обсяг мембранної камери; - щільність контрольованого рідкого середовища; g - прискорення вільного падіння; G - сумарна вага поплавця 1, мембранної камери 7, з'єднаних патрубком 6, і нейтральної рідини, що перебуває усередині поплавця й мембранної камери і формулою PAp.2 VПП VПП VПТ VПГ VПГ g const 35 40 45 50 (2) що описує незмінність глибини занурення Н плаваючого поплавця в рідке середовище при зміні її щільності (при будь-якому збільшенні й знаку збільшення щільності рідкого середовища), P PAp.1 де Ap. 2 - сила, що виштовхує, діє на поплавець 1 і мембранну камеру 7, з'єднаних патрубком 6; VПП - збільшення обсягу зануреної частини поплавця 1 у рідке середовище при зміні щільності рідкого середовища; VПГ - збільшення обсягу мембранної камери 7 при зміні щільності рідкого середовища. Якщо змінюється тільки рівень рідкого середовища Нс у технологічному об'єкті 12, то поплавець 1 копіює зазначений рівень і глибина занурення Н поплавця в рідке середовище залишається постійною. У цьому випадку при відхиленні рівня рідкого середовища в технологічному об'єкті поплавець, впливаючи на сприймаючий елемент блока сигналізації або регулювання, забезпечує включення елементів сигналізації або регулюючого блока, що забезпечує подачу рідкого середовища в об'єкт. Якщо змінюється (наприклад, збільшується) щільність рідкого середовища в об'єкті (при незмінному її рівні Нс), то це приводить до збільшення сили, що виштовхує, діє на поплавець і мембранну камеру, занурені в рідке середовище й одночасно до зменшення обсягу мембранної камери, тому що при збільшенні щільності контрольованого середовища одночасно збільшується тиск на мембрани (відповідно до закону Паскаля Р=Нмρ g → (Р+ΔР)=Нм (ρ+Δρ)g, внаслідок чого (мембрани 9, 10 прогинаються всередину) частина рідини з мембранної камери 2 UA 84353 U переміщається в поплавець, але загальна вага G поплавця, мембранної камери й рідини в поплавці й мембранній камері залишається незмінним. З урахуванням формул (1), (2) і протилежності знаків збільшень сили, що виштовхує сили та діє на поплавець і мембранну камеру, і обсягу мембранної камери, справедливо: 5 VППg VПГ g або VППg VПГ або H SПП 2SM (3) де VПП - обсяг зануреного в рідке середовище плаваючого поплавця; VПГ - обсяг зануреного в рідке середовище поплавця; - збільшення щільності контрольованого рідкого середовища; g - прискорення вільного падіння; 10 H - зміна глибини занурення плаваючого поплавця при зміні щільності рідкого середовища; SПП - площа поперечного перерізу плаваючого поплавця; - середня величина прогину мембрани зануреного поплавця при зміні щільності рідкого 15 20 25 30 середовища; SM - площа мембрани зануреного поплавця. З формули (3) випливає, що при раціональному виборі площі мембран можлива компенсація впливу щільності рідкого середовища на положення поплавця сигналізаторів і регуляторів рівня рідких середовищ. Це суттєво розширює використання плаваючих поплавців у системах сигналізації й регулювання рідких середовищ і мінімізує погрішність сигналізації й регулювання при значних змінах щільності рідких середовищ у технологічних об'єктах. Таким чином, пропонований поплавець для сигналізаторів і регуляторів має в порівнянні із прототипом наступні переваги: виключається вплив коливань щільності на результати виміру (сигналізації й регулювання) рівня рідкого середовища в технологічних об'єктах, забезпечується (при будь-яких змінах щільності) вертикальне переміщення поплавця й можливість установки на поплавці перетворювачів переміщення в аналоговий сигнал, виключаються умови виникнення коливання поплавця й рідини, що перебуває в поплавці, при різких змінах щільності рідких середовищ і, отже, умови виникнення коливального режиму в системах регулювання рівня рідких середовищ. Джерела інформації: 1. А.С. СРСР № 1425455, кл. G01 F23/76, 1972 2. Патент України (UA) № 32985, кл. G01 F23/00, 2008 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 Поплавець для сигналізаторів та регуляторів, що має циліндричну форму і з'єднаний за допомогою осі, закріпленої на поплавці, і важеля, закріпленого на осі, зі стаціонарною віссю, який відрізняється тим, що в центрах верхнього й нижнього днищ поплавця виконані отвори, у яких закріплені патрубки, перший з яких забезпечує зв'язок внутрішньої порожнини поплавця з атмосферою, другий герметично і співвісно з'єднує внутрішню порожнину поплавця із мембранною камерою, розташованою під поплавцем, мембранна камера складається з кільцевого корпусу, бічні стінки якого герметично закриті гумовими мембранами, при цьому загальна внутрішня порожнина поплавця і мембранної камери заповнена рідиною до межі, при якій рідина займає (0,30-0,35) % внутрішнього обсягу поплавця, а обсяги поплавця й мембранної камери і їх маси вибрані так, щоб збільшення обсягу зануреної в рідину частини поплавця при зміні щільності контрольованого середовища дорівнювало збільшенню обсягу мембранної камери з протилежним знаком - дотримувалася умова H - зміна глибини занурення поплавця при зміні щільності рідкого середовища; S ПП - площа поперечного перерізу поплавця; - середня величина прогину мембрани мембранної камери при зміні щільності рідкого де 50 H SПП 2SM , середовища; SM - площа мембрани мембранної камери. 3 UA 84353 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюDubovets Oleksii Mykolaiovych
Автори російськоюДубовец Алексей Николаевич
МПК / Мітки
МПК: G01F 23/00
Мітки: регуляторів, поплавець, сигналізаторів
Код посилання
<a href="https://ua.patents.su/6-84353-poplavec-dlya-signalizatoriv-ta-regulyatoriv.html" target="_blank" rel="follow" title="База патентів України">Поплавець для сигналізаторів та регуляторів</a>
Поплавець для рівнемірів
Номер патенту: 46463
Опубліковано: 25.12.2009
Автори: Григорова Олена Миколаївна, Жилінська Марина Станіславівна, Дубовець Олексій Миколайович
МПК: G01F 23/00
Мітки: поплавець, рівнемірів
Формула / Реферат:
Поплавець для рівнемірів, виконаний у вигляді порожнього циліндрового тіла, усередині якого розташована профільована ємкість, частково заповнена рідиною, і пристрій для кріплення профільованої ємкості, який відрізняється тим, що циліндровий поплавець за допомогою важеля і осі, закріпленої на корпусі поплавця, сполучений із стаціонарно встановленою віссю з можливістю переміщення поплавця у вертикальному напрямі і його повороту за і проти...
Поплавець для рівнемірів
Номер патенту: 32985
Опубліковано: 10.06.2008
Автори: Нестеренко Павло Єгорович, Григорова Олена Миколаївна, Дубовець Олексій Миколайович
МПК: G01F 23/00
Мітки: рівнемірів, поплавець
Формула / Реферат:
Поплавець для рівнемірів, що виконаний у вигляді порожнистого циліндрового тіла із зміщеним центром тяжіння в нижню половину поплавця і убік від його осі, на кришці якого розміщена мітка, суміщена з віссю циліндра, який відрізняється тим, що усередині поплавця розташована профільована ємність прямокутного поперечного перерізу, частково заповнена рідиною, один кінець якої закріплений на стінці поплавця з можливість повороту, інший кінець...
Поплавець для рибної ловлі
Номер патенту: 2528
Опубліковано: 15.06.2004
Автор: Невлер Володимир Лазарович
МПК: A01K 93/00
Мітки: рибної, поплавець, ловлі
Формула / Реферат:
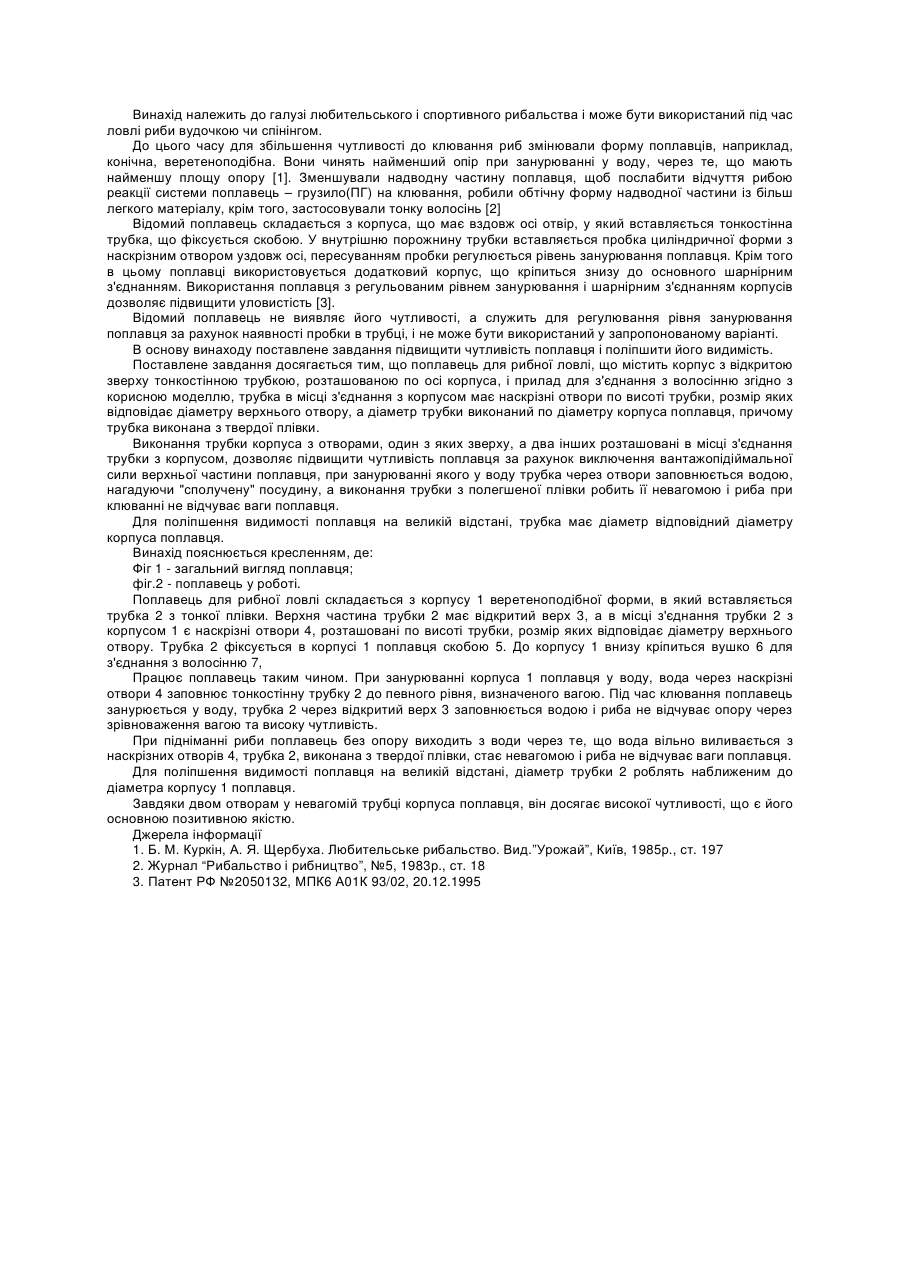
1. Поплавець для рибної ловлі, що включає корпус з відкритою зверху тонкостінною трубкою, розташованою по осі корпуса, і прилад для з'єднання з волосінню, який відрізняється тим, що в місці з'єднання трубки з корпусом виконані наскрізні отвори по висоті трубки, розмір яких відповідає діаметру верхнього отвору, а діаметр трубки відповідає діаметру корпуса поплавця.2. Поплавець за п.1, який відрізняється тим, що трубка виконана з твердої...
Пристрій для вимірювання рівня і щільності
Номер патенту: 46464
Опубліковано: 25.12.2009
Автори: Григорова Олена Миколаївна, Дубовець Олексій Миколайович, Руденко Максим Валерійович
МПК: G01F 23/00
Мітки: щільності, рівня, пристрій, вимірювання
Формула / Реферат:
Пристрій для вимірювання рівня і щільності, що містить плаваючий і занурений поплавці, перетворювачі переміщення плаваючого і зануреного поплавців, що формують інформацію про значення рівня і щільності контрольованої рідини в ємності і мікропроцесорного контролера, що вимірюють одночасно поточні значення рівня і щільності рідини в ємності, який відрізняється тим, що на плаваючому поплавці встановлена котушка з розміщеним в ній плунжером...
Спосіб перевантажування твердої речовини, що має високий вміст вологи (варіанти), та поплавець для його здійснення
Номер патенту: 51851
Опубліковано: 16.12.2002
Автори: Ватне Пер, Хансен-Танген Туре
МПК: B63B 27/00
Мітки: вологи, високий, варіанти, вміст, здійснення, перевантажування, твердої, речовини, має, спосіб, поплавець
Формула / Реферат:
1. Спосіб розвантажування твердої речовини, що має високий вміст вологи, з насипного судна за допомогою насосних систем, причому зазначене насипне судно має один або більше вантажних трюмів, які приймають тверду речовину, а тверда речовина має і такий високий вміст вологи, що принаймні над ділянками твердої речовини утворюється шар води, який відрізняється тим, що зазначена тверда речовина відкачується з вантажного трюму за допомогою...
Попередній патент: Плоский оздоблювальний елемент
Наступний патент: Неалгебраїчний декодер коригувальних кодів
Випадковий патент: Прес для відтискання олії