Ручний господарський візок


Формула / Реферат
Ручний господарський візок, який містить опорну раму, жорстко з'єднану з вантажонесучою платформою, яка містить в нижній частині упорний елемент, ходові колеса на осі, механізм переміщення ходових коліс на осі, що утворює з частинами упорного елемента жорстку рамку в поперечній вертикальній площині з можливістю переміщення і фіксації останньої в проміжних положеннях механізмом фіксації, механізм переміщення ходових коліс на осі виконаний у вигляді напрямних стержнів, жорстко закріплених на осі ходових коліс поздовжньо по боках в горизонтальній площині з можливістю осьового переміщення і взаємодії вільними кінцями з напрямними гільзами, жорстко закріпленими на упорному елементі в поздовжній горизонтальній площині і підтримуваними на вантажонесучій платформі знизу за допомогою підтримуючих кронштейнів, жорстка рамка змонтована за допомогою поперечної осі на напрямних стержнях між віссю ходових коліс і вільними кінцями напрямних стержнів, механізм фіксації змонтований по боках в поздовжній вертикальній площині і містить кронштейни, жорстко змонтовані знизу вантажонесучої платформи з жорстким примиканням до підтримуючих кронштейнів, з наскрізними поздовжніми пазами і глухими чашечками, виконаними на зовнішніх поверхнях кронштейнів у вертикальній площині перпендикулярно осі пазів з можливістю взаємодії з фіксаторами, жорстко закріпленими на тримачах, змонтованих співвісно з верхньою віссю жорсткої рамки поздовжньо по боках з можливістю осьового переміщення і поздовжнього переміщення в пазах кронштейнів і підпружинених до останніх за допомогою пружин стискання, при цьому тримачі на внутрішніх вільних кінцях містять жорстко закріплені напрямні шайби, які взаємодіють з пружинами стискання, який відрізняється тим, що механізм переміщення ходових коліс на осі додатково оснащений механізмом ручного керування, який містить закріплений на опорній рамі з можливістю осьового переміщення у вертикальній площині жорсткий трубчастий елемент, який містить всередині трос з можливістю осьового переміщення останнього відносно трубчастого елемента, на верхньому вільному кінці трубчастого елемента жорстко закріплена нерухома рукоятка, кінець якої шарнірно з'єднаний і підпружинений відносно рухомої у вертикальній площині упорної пластини, що містить на вільному кінці вилку з фіксатором, закріпленим до кінця троса з можливістю переміщення фіксатора в пазу, виконаному в трубчастому елементі, нижній вільний кінець трубчастого елемента жорстко з'єднаний з кінцем гнучкого порожнистого елемента, що містить всередині продовження троса від жорсткого трубчастого елемента з можливістю осьового переміщення гнучкого порожнистого елемента в L-подібній оправці, закріпленій в нижній частині на опорній рамі, другий кінець гнучкого порожнистого елемента жорстко закріплений на верхній осі жорсткої рамки, механізм фіксації містить трапецієподібний плоский упор, жорстко закріплений в горизонтальній площині на другому кінці троса, і повернений меншою основою в бік гнучкого порожнистого елемента з можливістю переміщення в осьовому напрямку в горизонтальній площині і взаємодії боковими поверхнями з вільними кінцями тримачів, більша основа трапецієподібного плоского упора виконана з можливістю взаємодії з обмежником, жорстко закріпленим на верхній осі жорсткої рамки, причому вільні кінці тримачів виконані опуклими, а бокові поверхні трапецієподібного плоского упора угнутими, копіюючими поверхні вільних кінців тримачів.
Текст
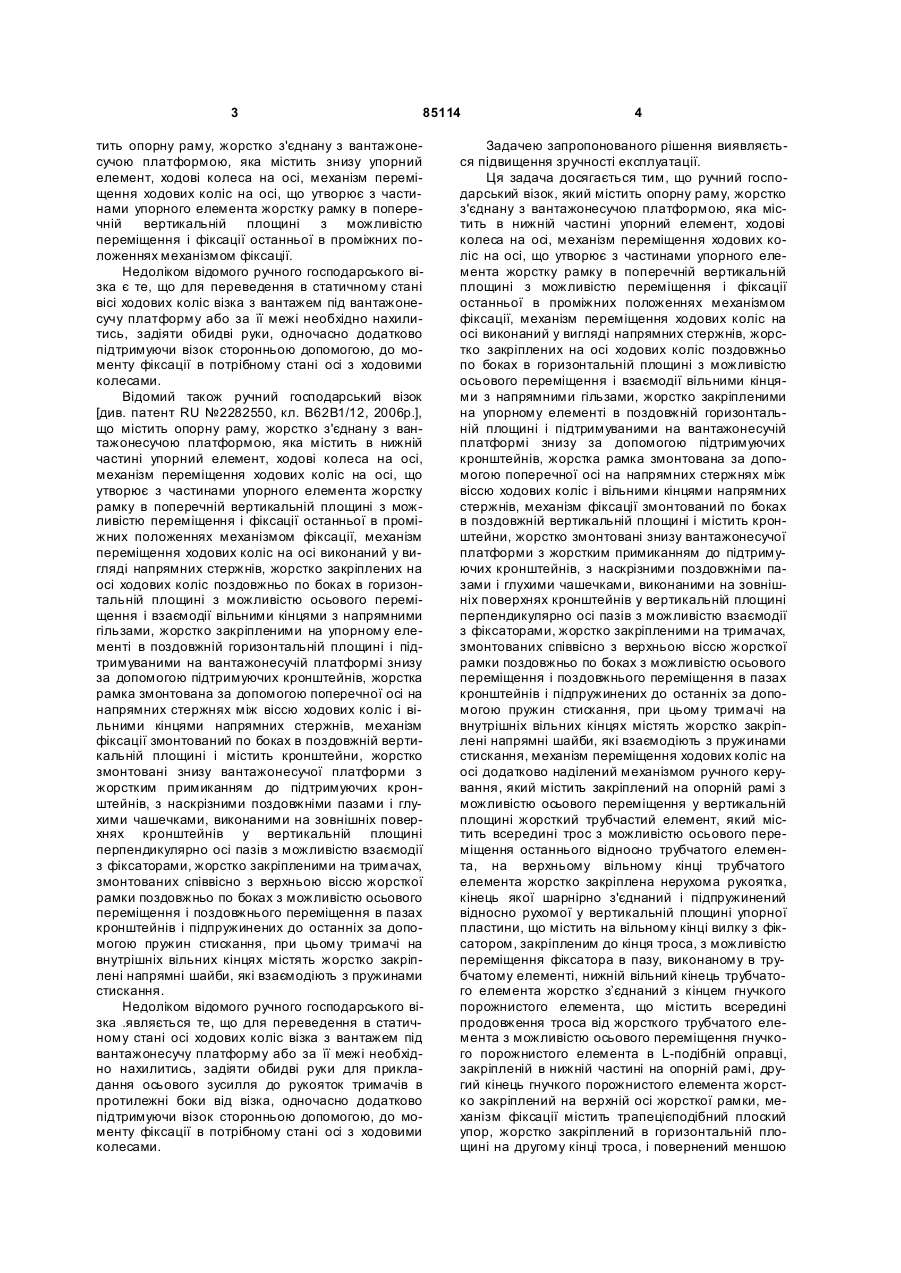
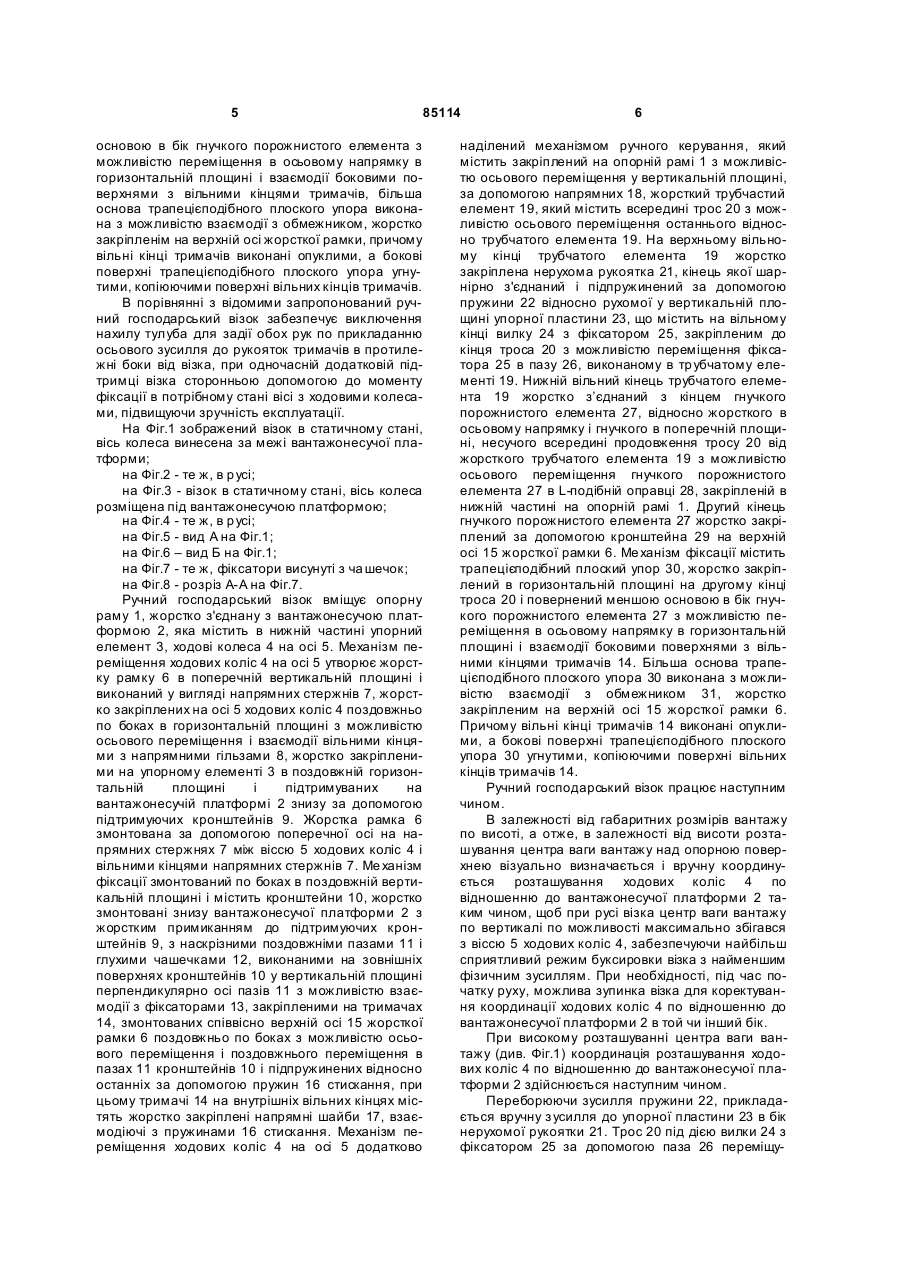
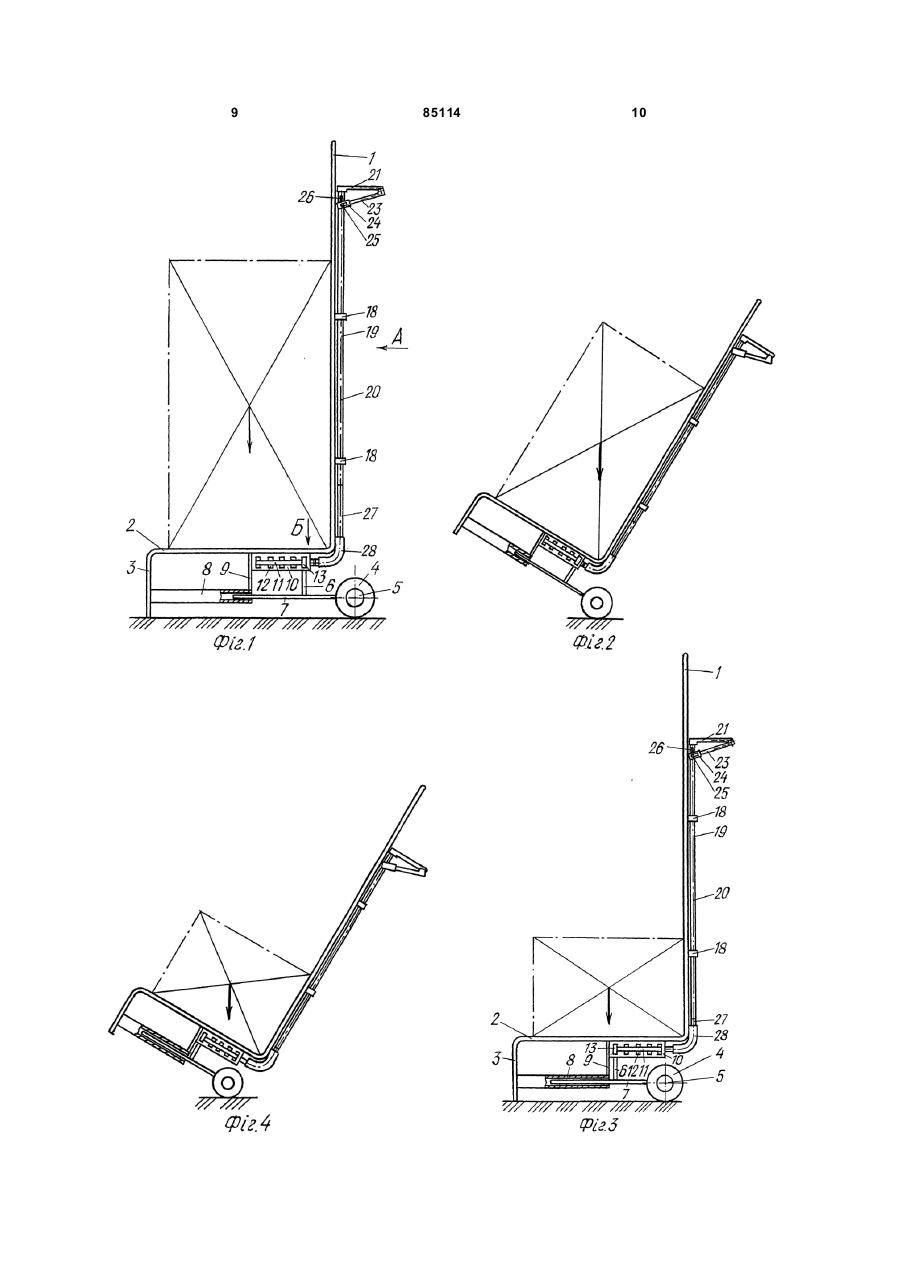
Ручний господарський візок, який містить опорну раму, жорстко з'єднану з вантажонесучою платформою, яка містить в нижній частині упорний елемент, ходові колеса на осі, механізм переміщення ходових коліс на осі, що утворює з частинами упорного елемента жорстку рамку в поперечній вертикальній площині з можливістю переміщення і фіксації останньої в проміжних положеннях механізмом фіксації, механізм переміщення ходових коліс на осі виконаний у вигляді напрямних стержнів, жорстко закріплених на осі ходових коліс поздовжньо по боках в горизонтальній площині з можливістю осьового переміщення і взаємодії вільними кінцями з напрямними гільзами, жорстко закріпленими на упорному елементі в поздовжній горизонтальній площині і підтримуваними на вантажонесучій платформі знизу за допомогою підтримуючих кронштейнів, жорстка рамка змонтована за допомогою поперечної осі на напрямних стержнях між віссю ходових коліс і вільними кінцями напрямних стержнів, механізм фіксації змонтований по боках в поздовжній вертикальній площині і містить кронштейни, жорстко змонтовані знизу вантажонесучої платформи з жорстким примиканням до підтримуючих кронштейнів, з наскрізними поздовжніми пазами і глухими чашечками, виконаними на зовнішніх поверхнях кронштейнів у вертикальній площині перпендикулярно осі пазів з можливістю взаємодії з фіксаторами, жорстко закріпленими на тримачах, змонтованих співвісно з верхньою віссю жорсткої рамки поздовжньо по боках з можливістю осьового C2 2 (19) 1 3 85114 тить опорну раму, жорстко з'єднану з вантажонесучою платформою, яка містить знизу упорний елемент, ходові колеса на осі, механізм переміщення ходових коліс на осі, що утворює з частинами упорного елемента жорстку рамку в поперечній вертикальній площині з можливістю переміщення і фіксації останньої в проміжних положеннях механізмом фіксації. Недоліком відомого ручного господарського візка є те, що для переведення в статичному стані вісі ходових коліс візка з вантажем під вантажонесучу платформу або за її межі необхідно нахилитись, задіяти обидві руки, одночасно додатково підтримуючи візок сторонньою допомогою, до моменту фіксації в потрібному стані осі з ходовими колесами. Відомий також ручний господарський візок [див. патент RU №2282550, кл. В62В1/12, 2006p.], що містить опорну раму, жорстко з'єднану з вантажонесучою платформою, яка містить в нижній частині упорний елемент, ходові колеса на осі, механізм переміщення ходових коліс на осі, що утворює з частинами упорного елемента жорстку рамку в поперечній вертикальній площині з можливістю переміщення і фіксації останньої в проміжних положеннях механізмом фіксації, механізм переміщення ходових коліс на осі виконаний у вигляді напрямних стержнів, жорстко закріплених на осі ходових коліс поздовжньо по боках в горизонтальній площині з можливістю осьового переміщення і взаємодії вільними кінцями з напрямними гільзами, жорстко закріпленими на упорному елементі в поздовжній горизонтальній площині і підтримуваними на вантажонесучій платформі знизу за допомогою підтримуючих кронштейнів, жорстка рамка змонтована за допомогою поперечної осі на напрямних стержнях між віссю ходових коліс і вільними кінцями напрямних стержнів, механізм фіксації змонтований по боках в поздовжній вертикальній площині і містить кронштейни, жорстко змонтовані знизу вантажонесучої платформи з жорстким примиканням до підтримуючих кронштейнів, з наскрізними поздовжніми пазами і глухими чашечками, виконаними на зовнішніх поверхнях кронштейнів у вертикальній площині перпендикулярно осі пазів з можливістю взаємодії з фіксаторами, жорстко закріпленими на тримачах, змонтованих співвісно з верхньою віссю жорсткої рамки поздовжньо по боках з можливістю осьового переміщення і поздовжнього переміщення в пазах кронштейнів і підпружинених до останніх за допомогою пружин стискання, при цьому тримачі на внутрішніх вільних кінцях містять жорстко закріплені напрямні шайби, які взаємодіють з пружинами стискання. Недоліком відомого ручного господарського візка .являється те, що для переведення в статичному стані осі ходових коліс візка з вантажем під вантажонесучу платформу або за її межі необхідно нахилитись, задіяти обидві руки для прикладання осьового зусилля до рукояток тримачів в протилежні боки від візка, одночасно додатково підтримуючи візок сторонньою допомогою, до моменту фіксації в потрібному стані осі з ходовими колесами. 4 Задачею запропонованого рішення виявляється підвищення зручності експлуатації. Ця задача досягається тим, що ручний господарський візок, який містить опорну раму, жорстко з'єднану з вантажонесучою платформою, яка містить в нижній частині упорний елемент, ходові колеса на осі, механізм переміщення ходових коліс на осі, що утворює з частинами упорного елемента жорстку рамку в поперечній вертикальній площині з можливістю переміщення і фіксації останньої в проміжних положеннях механізмом фіксації, механізм переміщення ходових коліс на осі виконаний у вигляді напрямних стержнів, жорстко закріплених на осі ходових коліс поздовжньо по боках в горизонтальній площині з можливістю осьового переміщення і взаємодії вільними кінцями з напрямними гільзами, жорстко закріпленими на упорному елементі в поздовжній горизонтальній площині і підтримуваними на вантажонесучій платформі знизу за допомогою підтримуючих кронштейнів, жорстка рамка змонтована за допомогою поперечної осі на напрямних стержнях між віссю ходових коліс і вільними кінцями напрямних стержнів, механізм фіксації змонтований по боках в поздовжній вертикальній площині і містить кронштейни, жорстко змонтовані знизу вантажонесучої платформи з жорстким примиканням до підтримуючих кронштейнів, з наскрізними поздовжніми пазами і глухими чашечками, виконаними на зовнішніх поверхнях кронштейнів у вертикальній площині перпендикулярно осі пазів з можливістю взаємодії з фіксаторами, жорстко закріпленими на тримачах, змонтованих співвісно з верхньою віссю жорсткої рамки поздовжньо по боках з можливістю осьового переміщення і поздовжнього переміщення в пазах кронштейнів і підпружинених до останніх за допомогою пружин стискання, при цьому тримачі на внутрішніх вільних кінцях містять жорстко закріплені напрямні шайби, які взаємодіють з пружинами стискання, механізм переміщення ходових коліс на осі додатково наділений механізмом ручного керування, який містить закріплений на опорній рамі з можливістю осьового переміщення у вертикальній площині жорсткий трубчастий елемент, який містить всередині трос з можливістю осьового переміщення останнього відносно трубчатого елемента, на верхньому вільному кінці трубчатого елемента жорстко закріплена нерухома рукоятка, кінець якої шарнірно з'єднаний і підпружинений відносно рухомої у вертикальній площині упорної пластини, що містить на вільному кінці вилку з фіксатором, закріпленим до кінця троса, з можливістю переміщення фіксатора в пазу, виконаному в трубчатому елементі, нижній вільний кінець трубчатого елемента жорстко з’єднаний з кінцем гнучкого порожнистого елемента, що містить всередині продовження троса від жорсткого трубчатого елемента з можливістю осьового переміщення гнучкого порожнистого елемента в L-подібній оправці, закріпленій в нижній частині на опорній рамі, другий кінець гнучкого порожнистого елемента жорстко закріплений на верхній осі жорсткої рамки, механізм фіксації містить трапецієподібний плоский упор, жорстко закріплений в горизонтальній площині на другому кінці троса, і повернений меншою 5 85114 основою в бік гнучкого порожнистого елемента з можливістю переміщення в осьовому напрямку в горизонтальній площині і взаємодії боковими поверхнями з вільними кінцями тримачів, більша основа трапецієподібного плоского упора виконана з можливістю взаємодії з обмежником, жорстко закріпленім на верхній осі жорсткої рамки, причому вільні кінці тримачів виконані опуклими, а бокові поверхні трапецієподібного плоского упора угнутими, копіюючими поверхні вільних кінців тримачів. В порівнянні з відомими запропонований ручний господарський візок забезпечує виключення нахилу тулуба для задії обох рук по прикладанню осьового зусилля до рукояток тримачів в протилежні боки від візка, при одночасній додатковій підтримці візка сторонньою допомогою до моменту фіксації в потрібному стані вісі з ходовими колесами, підвищуючи зручність експлуатації. На Фіг.1 зображений візок в статичному стані, вісь колеса винесена за межі вантажонесучої платформи; на Фіг.2 - те ж, в р усі; на Фіг.3 - візок в статичному стані, вісь колеса розміщена під вантажонесучою платформою; на Фіг.4 - те ж, в р усі; на Фіг.5 - вид А на Фіг.1; на Фіг.6 – вид Б на Фіг.1; на Фіг.7 - те ж, фіксатори висунуті з ча шечок; на Фіг.8 - розріз A-A на Фіг.7. Ручний господарський візок вміщує опорну раму 1, жорстко з'єднану з вантажонесучою платформою 2, яка містить в нижній частині упорний елемент 3, ходові колеса 4 на осі 5. Механізм переміщення ходових коліс 4 на осі 5 утворює жорстку рамку 6 в поперечній вертикальній площині і виконаний у вигляді напрямних стержнів 7, жорстко закріплених на осі 5 ходових коліс 4 поздовжньо по боках в горизонтальній площині з можливістю осьового переміщення і взаємодії вільними кінцями з напрямними гільзами 8, жорстко закріпленими на упорному елементі 3 в поздовжній горизонтальній площині і підтримуваних на вантажонесучій платформі 2 знизу за допомогою підтримуючих кронштейнів 9. Жорстка рамка 6 змонтована за допомогою поперечної осі на напрямних стержнях 7 між віссю 5 ходових коліс 4 і вільними кінцями напрямних стержнів 7. Ме ханізм фіксації змонтований по боках в поздовжній вертикальній площині і містить кронштейни 10, жорстко змонтовані знизу вантажонесучої платформи 2 з жорстким примиканням до підтримуючих кронштейнів 9, з наскрізними поздовжніми пазами 11 і глухими чашечками 12, виконаними на зовнішніх поверхнях кронштейнів 10 у вертикальній площині перпендикулярно осі пазів 11 з можливістю взаємодії з фіксаторами 13, закріпленими на тримачах 14, змонтованих співвісно верхній осі 15 жорсткої рамки 6 поздовжньо по боках з можливістю осьового переміщення і поздовжнього переміщення в пазах 11 кронштейнів 10 і підпружинених відносно останніх за допомогою пружин 16 стискання, при цьому тримачі 14 на внутрішніх вільних кінцях містять жорстко закріплені напрямні шайби 17, взаємодіючі з пружинами 16 стискання. Механізм переміщення ходових коліс 4 на осі 5 додатково 6 наділений механізмом ручного керування, який містить закріплений на опорній рамі 1 з можливістю осьового переміщення у вертикальній площині, за допомогою напрямних 18, жорсткий трубчастий елемент 19, який містить всередині трос 20 з можливістю осьового переміщення останнього відносно трубчатого елемента 19. На верхньому вільному кінці трубчатого елемента 19 жорстко закріплена нерухома рукоятка 21, кінець якої шарнірно з'єднаний і підпружинений за допомогою пружини 22 відносно рухомої у вертикальній площині упорної пластини 23, що містить на вільному кінці вилку 24 з фіксатором 25, закріпленим до кінця троса 20 з можливістю переміщення фіксатора 25 в пазу 26, виконаному в тр убчатому елементі 19. Нижній вільний кінець трубчатого елемента 19 жорстко з’єднаний з кінцем гнучкого порожнистого елемента 27, відносно жорсткого в осьовому напрямку і гнучкого в поперечній площині, несучого всередині продовження тросу 20 від жорсткого трубчатого елемента 19 з можливістю осьового переміщення гнучкого порожнистого елемента 27 в L-подібній оправці 28, закріпленій в нижній частині на опорній рамі 1. Другий кінець гнучкого порожнистого елемента 27 жорстко закріплений за допомогою кронштейна 29 на верхній осі 15 жорсткої рамки 6. Ме ханізм фіксації містить трапецієподібний плоский упор 30, жорстко закріплений в горизонтальній площині на другому кінці троса 20 і повернений меншою основою в бік гнучкого порожнистого елемента 27 з можливістю переміщення в осьовому напрямку в горизонтальній площині і взаємодії боковими поверхнями з вільними кінцями тримачів 14. Більша основа трапецієподібного плоского упора 30 виконана з можливістю взаємодії з обмежником 31, жорстко закріпленим на верхній осі 15 жорсткої рамки 6. Причому вільні кінці тримачів 14 виконані опуклими, а бокові поверхні трапецієподібного плоского упора 30 угнутими, копіюючими поверхні вільних кінців тримачів 14. Ручний господарський візок працює наступним чином. В залежності від габаритних розмірів вантажу по висоті, а отже, в залежності від висоти розташування центра ваги вантажу над опорною поверхнею візуально визначається і вручну координується розташування ходових коліс 4 по відношенню до вантажонесучої платформи 2 таким чином, щоб при русі візка центр ваги вантажу по вертикалі по можливості максимально збігався з віссю 5 ходових коліс 4, забезпечуючи найбільш сприятливий режим буксировки візка з найменшим фізичним зусиллям. При необхідності, під час початку руху, можлива зупинка візка для коректування координації ходових коліс 4 по відношенню до вантажонесучої платформи 2 в той чи інший бік. При високому розташуванні центра ваги вантажу (див. Фіг.1) координація розташування ходових коліс 4 по відношенню до вантажонесучої платформи 2 здійснюється наступним чином. Переборюючи зусилля пружини 22, прикладається вручну з усилля до упорної пластини 23 в бік нерухомої рукоятки 21. Трос 20 під дією вилки 24 з фіксатором 25 за допомогою паза 26 переміщу 7 85114 ється в порожнинах трубчатого елемента 19 і гнучкого порожнистого елемента 27 в осьовому напрямку в бік нерухомої рукоятки 21. При цьому бокові поверхні трапецієподібного плоского упора 30, взаємодіючи з вільними кінцями тримачів 14, за допомогою напрямних шайб 17, стискають пружини 16 стискання, виводячи фіксатори 13 із зачеплення з глухими чашечками 12. Не знімаючи зусилля з упорної пластини 23 прикладається вертикальне зусилля до нерухомої рукоятки 21 таким чином, щоб вісь 5 з ходовими колесами 4 зайняла необхідний стан за межами вантажонесучої платформи 2. Одночасно гнучкий порожнистий елемент 27 переміщується в осьовому напрямку відносно L-подібної оправки 28, а жорсткий трубчастий елемент 19 переміщується в осьовому напрямку відносно напрямних 18. При цьому тримачі 14 переміщуються в поздовжніх пазах 11 кронштейнів 10 до співпадання фіксаторів 13 з необхідними порожнинами глухи х чашечок 12, а напрямні стержні 7 висовуються із відповідних напрямних гільз 8 назовні. Знімається одночасно зусилля з нерухомої рукоятки 21 і упорної пластини 23. При цьому упорна пластина 23 під дією розпрямляючого зусилля пружини 22 через вилку 24 з фіксатором 25 за допомогою паза 26 передає осьове зусилля на трос 20, який переміщуючись в порожнинах трубчатого елемента 19 і гнучкого порожнистого елемента 27, переміщує трапецієподібний плоский упор 30 до взаємодії його більшої основи з обмежником 31. Напрямні шайби 17 тримачів 14 під дією розпрямляючого зусилля пружин 16 стискання переміщуються всередині верхньої осі 15 жорсткої рамки 6 і займають вихідний стан. Фіксатори 13 взаємодіють в зачепленні з відповідними порожнинами глухи х чашечок 12. Візок підготовлений для транспортування вантажу. При низькому розташуванні центра ваги вантажу (див. Фіг.3) координація розташування ходових коліс 4 по відношенню до вантажонесучої платформи 2 здійснюється наступним чином. Переборюючи зусилля пружини 22, прикладається вручну з усилля до упорної пластини 23 в бік нерухомої рукоятки 21. Трос 20 під дією вилки 24 з фіксатором 25 за допомогою паза 26 переміщується в порожнинах трубчатого елемента 19 і гнучкого порожнистого елемента 27 в осьовому напрямку в бік нерухомої рукоятки 21. При цьому бокові поверхні трапецієподібного плоского упора 30, взаємодіючи з вільними кінцями тримачів 14, за допомогою напрямних шайб 17, стискають пружини 16 стискання, виводячи фіксатори 13 із зачеплення з глухими чашечками 12. Не знімаючи зусилля з упорної пластини 23 прикладається вертикальне зусилля до нерухомої рукоятки 21 таким чином, щоб вісь 5 з ходовими колесами 4 зайняла необхідний стан під вантажонесучою платформою 2. Одночасно гнучкий порожнистий елемент 27 переміщується в осьовому напрямку відносно L-подібної оправки 28, а жорсткий 8 трубчастий елемент 19 переміщується в осьовому напрямку відносно напрямних 18. При цьому тримачі 14 переміщуються в поздовжніх пазах 11 кронштейнів 10 до співпадання фіксаторів 13 з необхідними порожнинами глухих ча шечок 12, а напрямні стержні 7 всовуються у відповідні напрямні гільзи 8 всередину. Знімається одночасно зусилля з нерухомої рукоятки 21 і упорної пластини 23, При цьому упорна пластина 23 під дією розпрямляючого зусилля пружини 22 через вилку 24 з фіксатором 25 за допомогою паза 26 передає осьове зусилля на трос 20, який переміщуючись в порожнинах трубчатого елемента 19 і гнучкого порожнистого елемента 27, переміщує трапецієподібний плоский упор 30 до взаємодії його більшої основи з обмежником 31. Напрямні шайби 17 тримачів 14 під дією розпрямляючого зусилля пружин 16 стискання переміщуються всередині верхньої осі 15 жорсткої рамки 6 і займають вихідний стан. Фіксатори 13 взаємодіють в зачепленні з відповідними порожнинами глухи х чашечок 12. Візок підготовлений для транспортування вантажу. Обмежник 31, закріплений на зовнішній поверхні верхньої вісі 15, призначений, з одного боку, для забезпечення жорсткості верхньої осі 15,з другого боку, для обмеження руху в осьовому напрямку трапецієподібного плоского упора 30 і виключення виходу бокових поверхонь останнього із взаємодії з вільними кінцями тримачів 14. Вільні кінці тримачів 14 виконані опуклими, а бокові поверхні трапецієподібного плоского упора 30 угнутими, копіюючими поверхні вільних кінців тримачів 14, для більш надійного контакту взаємодіючих поверхонь, виключаючих провисання трапецієподібного плоского упора 30 на кінці гнучкого тросу 20 в горизонтальній площині по відношенню до вільних кінців тримачів 14. Гнучкий порожнистий елемент 27 виконаний гнучким в поперечній площині і відносно жорстким в осьовому напрямку, забезпечуючи передачу осьового зусилля від нерухомої рукоятки 21 по переміщенню в горизонтальній площині верхньої осі 15 разом з віссю 5 ходових коліс 4. Кронштейн 29, закріплений на зовнішній поверхні верхньої осі 15, забезпечує жорсткість останньої і фіксації кінця гнучкого порожнистого елемента 27 на верхній осі 15. L-подібна оправка 28, жорстко закріплена в нижній частині на опорній рамі 1, забезпечує зміну осьового руху гнучкого порожнистого елемента 27 з тросом 20 з вертикальної площини в горизонтальну. Таким чином, запропонований ручний господарський візок забезпечує виключення нахилу тулуба для задії обох рук по прикладанню осьового зусилля до рукояток тримачів в протилежні боки від візка при одночасній додатковій підтримці візка сторонньою допомогою до моменту фіксації в потрібному стані осі з ходовими колесами, підвищуючи зручність експлуатації. 9 85114 10 11 Комп’ютерна в ерстка Т. Чепелев а 85114 Підписне 12 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюHand household cart
Автори англійськоюKhudolii Oleksandr Ivanovych
Назва патенту російськоюРучная хозяйственная тележка
Автори російськоюХудолий Александр Иванович
МПК / Мітки
МПК: B62B 1/00
Мітки: господарський, ручний, візок
Код посилання
<a href="https://ua.patents.su/6-85114-ruchnijj-gospodarskijj-vizok.html" target="_blank" rel="follow" title="База патентів України">Ручний господарський візок</a>
Ручний господарський візок

Номер патенту: 78324
Опубліковано: 15.03.2007
Автор: Худолій Олександр Іванович
МПК: B62B 1/00
Мітки: господарський, візок, ручний
Формула / Реферат:
Ручний господарський візок, що містить опорну раму, жорстко з'єднану з вантажонесучою платформою, яка містить в нижній частині упорний елемент, ходові колеса на осі, механізм переміщення ходових коліс на осі, що утворює з частинами упорного елемента жорстку рамку в поперечній вертикальній площині з можливістю переміщення і фіксації останньої в проміжних положеннях механізмом фіксації, який відрізняється тим, що механізм переміщення ходових...
Ручний господарський візок

Номер патенту: 27841
Опубліковано: 16.10.2000
Автор: Худолій Олександр Іванович
МПК: B62B 1/00
Мітки: ручний, господарський, візок
Формула / Реферат:
Ручний господарський візок, що містить опорну раму, спряжену з вантажонесучою платформою, поворотною в повздовжній вертикальній площині, яка має в нижній частині упорний елемент, несучу П - подібну рукоятку, телескопічно зв’язану з рамою з можливістю фіксації в потрібному положенні, і ходові колеса, який відрізняється тим, що ходові колеса змонтовані на вантажонесучій платформі з боку опорної рами, опорна рама виконана з можливістю...
Ручний господарський візок

Номер патенту: 78322
Опубліковано: 15.03.2007
Автор: Худолій Олександр Іванович
МПК: B62B 1/00
Мітки: візок, ручний, господарський
Формула / Реферат:
Ручний господарський візок, що містить опорну раму, з'єднану з вантажонесучою платформою, яка містить знизу упорні елементи, змонтовані поздовжньо по боках і виконані -подібними у вигляді шарнірних багатоланковиків, з'єднаних між собою в поперечній площині у вершинах за допомогою осі і шарнірно закріплених на осях на вантажонесучій платформі і опорній рамі з можливістю...
Ручний господарський візок

Номер патенту: 72247
Опубліковано: 15.02.2005
Автор: Худолій Олександр Іванович
МПК: B62B 1/00
Мітки: ручний, господарський, візок
Формула / Реферат:
1. Ручний господарський візок, що містить опорну раму, жорстко з’єднану з вантажонесучою платформою, яка містить знизу -подібні упорні елементи, змонтовані поздовжньо по боках, і ходові колеса на осі, змонтовані на вантажонесучій платформі з боку опорної рами, який відрізняється тим, що -подібні упорні...
Візок ручний для транспортування кормів
Номер патенту: 35020
Опубліковано: 15.03.2001
Автори: Болонін Валерій Миколаєвич, Ахтирська Любов Іванівна, Сухоруков Василь Васильович
МПК: B62B 1/00
Мітки: транспортування, візок, кормів, ручний
Формула / Реферат:
Візок ручний для транспортування кормів, що містить раму, на якій розташовані поворотне колесо, опорна вісь з двома ведучими колесами і бункер, який відрізняється тим, що опорна вісь зміщена вперед у вертикальній площині по відношенню до центру ваги на 1/10 довжини рами, "передня стінка бункера скошена під кутом 40-45°, а бокові стінки мають шарнірно встановлені наставні борти, виконані з можливістю фіксації.
Попередній патент: Епоксидна композиція
Наступний патент: Спосіб лікування гнійного ендометриту у корів
Випадковий патент: Спосіб моделювання лікування запальних захворювань нирок при опіковій хворобі