Ручний господарський візок

Формула / Реферат
Ручний господарський візок, що містить опорну раму, жорстко з'єднану з вантажонесучою платформою, яка містить в нижній частині упорний елемент, ходові колеса на осі, механізм переміщення ходових коліс на осі, що утворює з частинами упорного елемента жорстку рамку в поперечній вертикальній площині з можливістю переміщення і фіксації останньої в проміжних положеннях механізмом фіксації, який відрізняється тим, що механізм переміщення ходових коліс на осі виконаний у вигляді напрямних стержнів, жорстко закріплених на осі ходових коліс поздовжньо по боках в горизонтальній площині з можливістю осьового переміщення і взаємодії вільними кінцями з напрямними гільзами, жорстко закріпленими на упорному елементі в поздовжній горизонтальній площині і підтримуваними на вантажонесучій платформі знизу за допомогою підтримуючих кронштейнів, жорстка рамка змонтована за допомогою поперечної осі на напрямних стержнях між віссю ходових коліс і вільними кінцями напрямних стержнів, механізм фіксації змонтований по боках в поздовжній вертикальній площині і містить кронштейни, жорстко змонтовані знизу вантажонесучої платформи з жорстким примиканням до підтримуючих кронштейнів, з наскрізними поздовжніми пазами і глухими чашечками, виконаними на зовнішніх поверхнях кронштейнів у вертикальній площині перпендикулярно осі пазів з можливістю взаємодії з фіксаторами, жорстко закріпленими на тримачах, змонтованих співвісно з верхньою віссю жорсткої рамки поздовжньо по боках з можливістю осьового переміщення і поздовжнього переміщення в пазах кронштейнів і підпружинених до останніх за допомогою пружин стискання, які мають на зовнішніх вільних кінцях жорстко закріплені рукоятки, а на внутрішніх вільних кінцях - жорстко закріплені напрямні шайби, що взаємодіють з пружинами стискання, причому фіксатори змонтовані між рукоятками і напрямними шайбами тримачів.
Текст
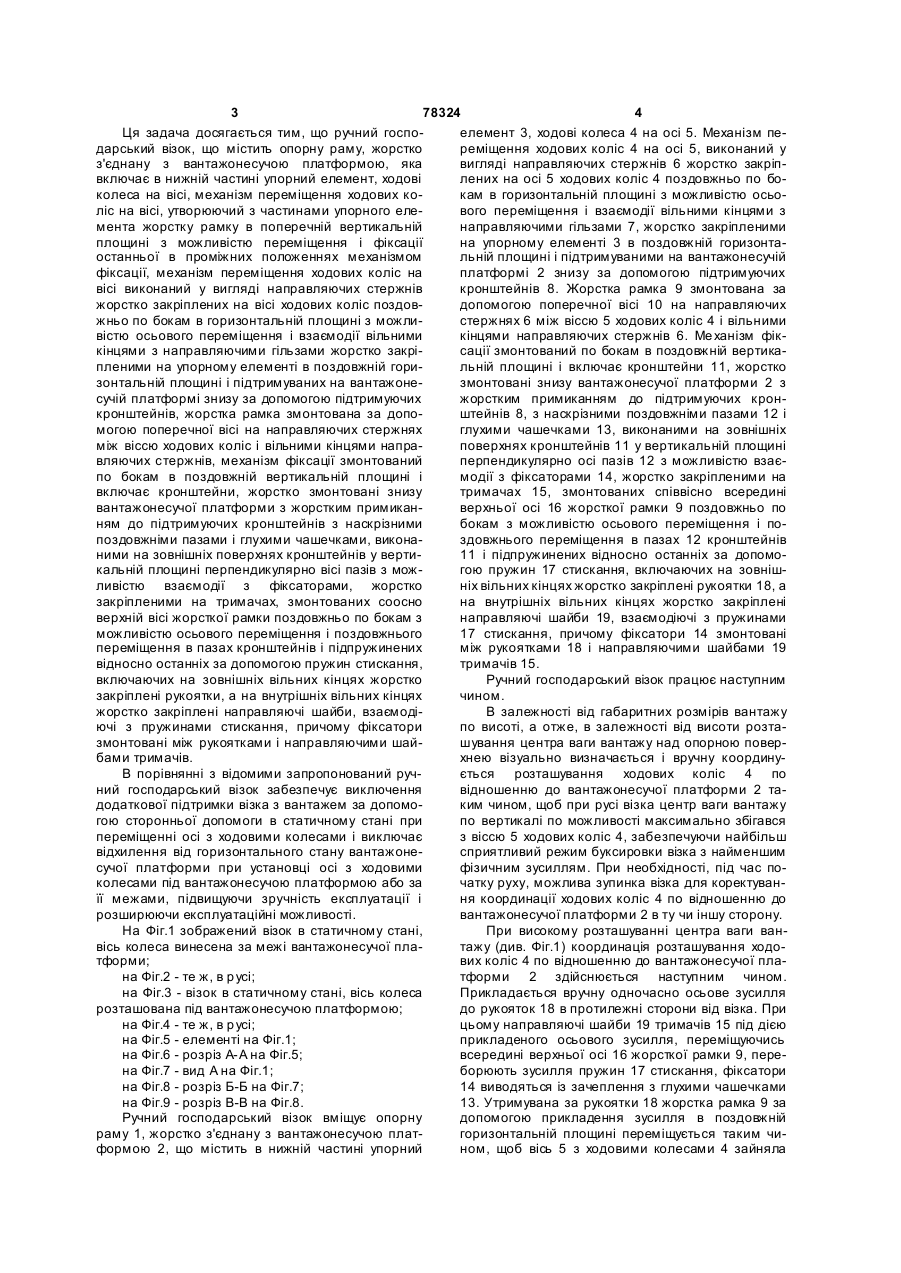
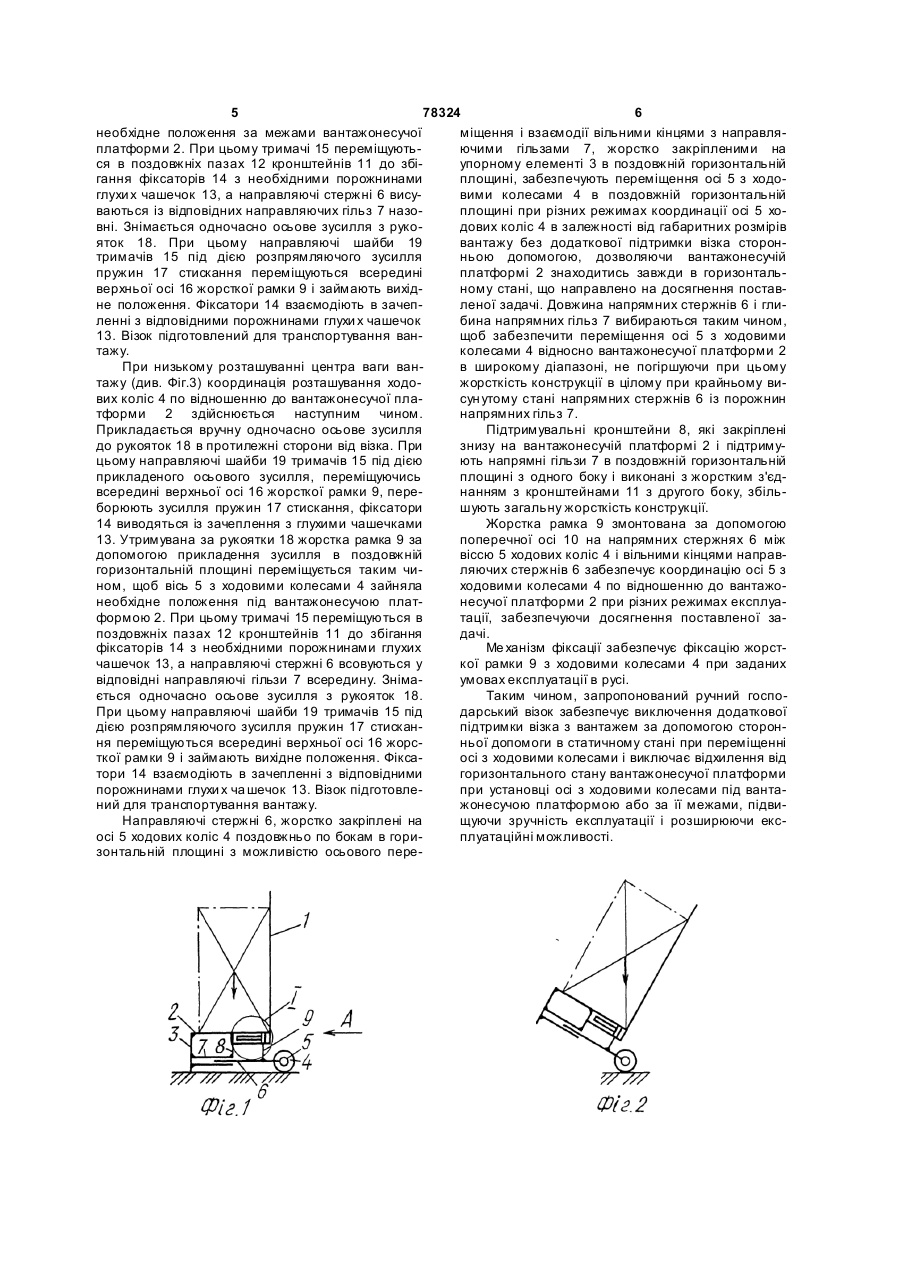
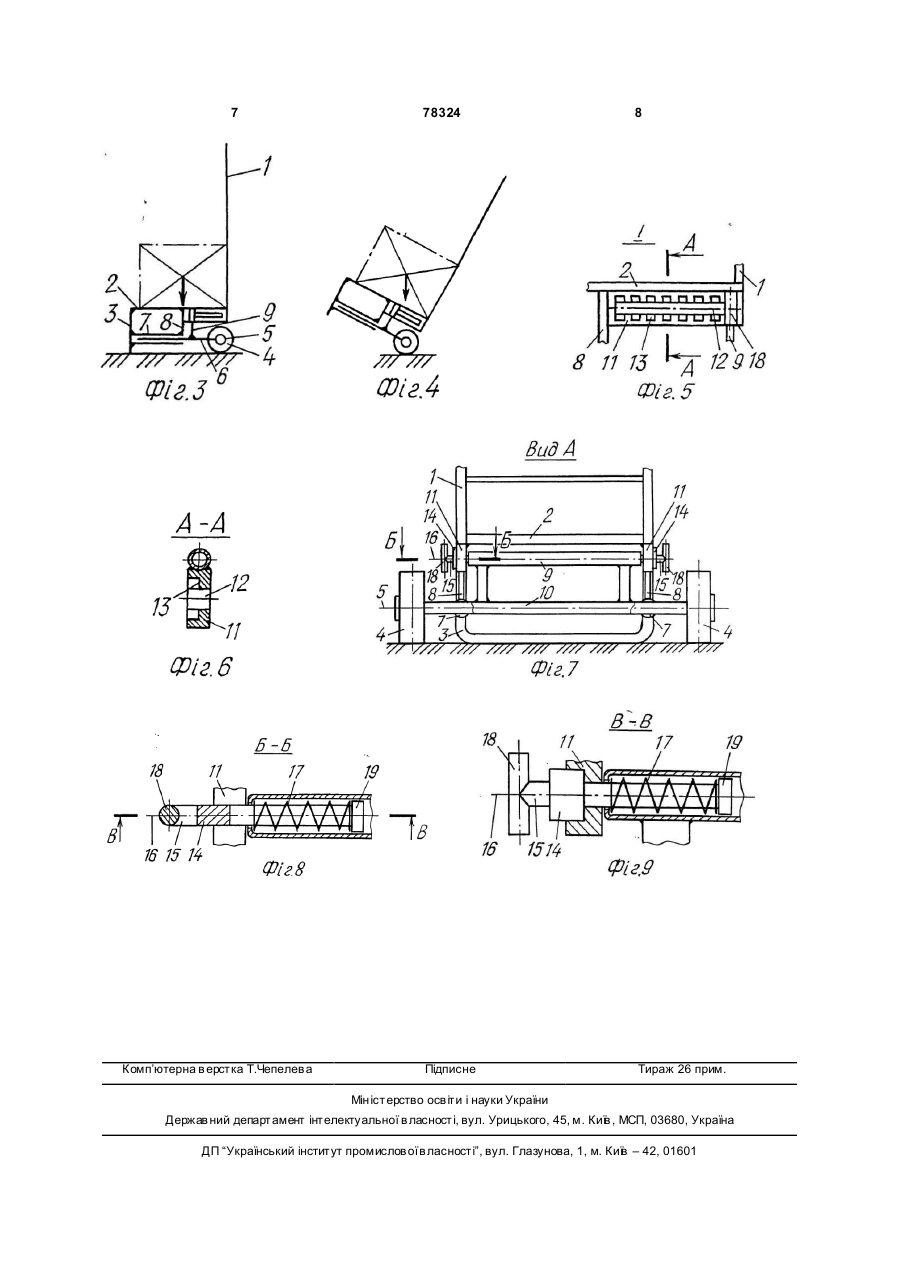
Ручний господарський візок, що містить опорну раму, жорстко з'єднану з вантажонесучою платформою, яка містить в нижній частині упорний елемент, ходові колеса на осі, механізм переміщення ходових коліс на осі, що утворює з частинами упорного елемента жорстку рамку в поперечній вертикальній площині з можливістю переміщення і фіксації останньої в проміжних положеннях механізмом фіксації, який відрізняється тим, що механізм переміщення ходових коліс на осі виконаний у вигляді напрямних стержнів, жорстко закріплених на осі ходових коліс поздовжньо по боках в горизонтальній площині з можливістю осьового переміщення і взаємодії вільними кінцями з напрямними гільзами, жорстко закріпленими на упорному елементі в поздовжній горизон C2 2 (19) 1 3 78324 4 Ця задача досягається тим, що ручний госпоелемент 3, ходові колеса 4 на осі 5. Механізм педарський візок, що містить опорну раму, жорстко реміщення ходових коліс 4 на осі 5, виконаний у з'єднану з вантажонесучою платформою, яка вигляді направляючих стержнів 6 жорстко закріпвключає в нижній частині упорний елемент, ходові лених на осі 5 ходових коліс 4 поздовжньо по боколеса на вісі, механізм переміщення ходових кокам в горизонтальній площині з можливістю осьоліс на вісі, утворюючий з частинами упорного елевого переміщення і взаємодії вільними кінцями з мента жорстку рамку в поперечній вертикальній направляючими гільзами 7, жорстко закріпленими площині з можливістю переміщення і фіксації на упорному елементі 3 в поздовжній горизонтаостанньої в проміжних положеннях механізмом льній площині і підтримуваними на вантажонесучій фіксації, механізм переміщення ходових коліс на платформі 2 знизу за допомогою підтримуючих вісі виконаний у вигляді направляючих стержнів кронштейнів 8. Жорстка рамка 9 змонтована за жорстко закріплених на вісі ходових коліс поздовдопомогою поперечної вісі 10 на направляючих жньо по бокам в горизонтальній площині з можлистержнях 6 між віссю 5 ходових коліс 4 і вільними вістю осьового переміщення і взаємодії вільними кінцями направляючих стержнів 6. Ме ханізм фіккінцями з направляючими гільзами жорстко закрісації змонтований по бокам в поздовжній вертикапленими на упорному елементі в поздовжній горильній площині і включає кронштейни 11, жорстко зонтальній площині і підтримуваних на вантажонезмонтовані знизу вантажонесучої платформи 2 з сучій платформі знизу за допомогою підтримуючих жорстким примиканням до підтримуючих кронкронштейнів, жорстка рамка змонтована за допоштейнів 8, з наскрізними поздовжніми пазами 12 і могою поперечної вісі на направляючих стержнях глухими чашечками 13, виконаними на зовнішніх між віссю ходових коліс і вільними кінцями напраповерхнях кронштейнів 11 у вертикальній площині вляючих стержнів, механізм фіксації змонтований перпендикулярно осі пазів 12 з можливістю взаєпо бокам в поздовжній вертикальній площині і модії з фіксаторами 14, жорстко закріпленими на включає кронштейни, жорстко змонтовані знизу тримачах 15, змонтованих співвісно всередині вантажонесучої платформи з жорстким примиканверхньої осі 16 жорсткої рамки 9 поздовжньо по ням до підтримуючих кронштейнів з наскрізними бокам з можливістю осьового переміщення і попоздовжніми пазами і глухими чашечками, виконаздовжнього переміщення в пазах 12 кронштейнів ними на зовнішніх поверхнях кронштейнів у верти11 і підпружинених відносно останніх за допомокальній площині перпендикулярно вісі пазів з можгою пружин 17 стискання, включаючих на зовнішливістю взаємодії з фіксаторами, жорстко ніх вільних кінцях жорстко закріплені рукоятки 18, а закріпленими на тримачах, змонтованих соосно на внутрішніх вільних кінцях жорстко закріплені верхній вісі жорсткої рамки поздовжньо по бокам з направляючі шайби 19, взаємодіючі з пружинами можливістю осьового переміщення і поздовжнього 17 стискання, причому фіксатори 14 змонтовані переміщення в пазах кронштейнів і підпружинених між рукоятками 18 і направляючими шайбами 19 відносно останніх за допомогою пружин стискання, тримачів 15. включаючих на зовнішніх вільних кінцях жорстко Ручний господарський візок працює наступним закріплені рукоятки, а на внутрішніх вільних кінцях чином. жорстко закріплені направляючі шайби, взаємодіВ залежності від габаритних розмірів вантажу ючі з пружинами стискання, причому фіксатори по висоті, а отже, в залежності від висоти розтазмонтовані між рукоятками і направляючими шайшування центра ваги вантажу над опорною повербами тримачів. хнею візуально визначається і вручну координуВ порівнянні з відомими запропонований ручється розташування ходових коліс 4 по ний господарський візок забезпечує виключення відношенню до вантажонесучої платформи 2 тадодаткової підтримки візка з вантажем за допомоким чином, щоб при русі візка центр ваги вантажу гою сторонньої допомоги в статичному стані при по вертикалі по можливості максимально збігався переміщенні осі з ходовими колесами і виключає з віссю 5 ходових коліс 4, забезпечуючи найбільш відхилення від горизонтального стану вантажонесприятливий режим буксировки візка з найменшим сучої платформи при установці осі з ходовими фізичним зусиллям. При необхідності, під час поколесами під вантажонесучою платформою або за чатку руху, можлива зупинка візка для коректуванїї межами, підвищуючи зручність експлуатації і ня координації ходових коліс 4 по відношенню до розширюючи експлуатаційні можливості. вантажонесучої платформи 2 в ту чи іншу сторону. На Фіг.1 зображений візок в статичному стані, При високому розташуванні центра ваги ванвісь колеса винесена за межі вантажонесучої платажу (див. Фіг.1) координація розташування ходотформи; вих коліс 4 по відношенню до вантажонесучої плана Фіг.2 - те ж, в р усі; тформи 2 здійснюється наступним чином. на Фіг.3 - візок в статичному стані, вісь колеса Прикладається вручну одночасно осьове зусилля розташована під вантажонесучою платформою; до рукояток 18 в протилежні сторони від візка. При на Фіг.4 - те ж, в р усі; цьому направляючі шайби 19 тримачів 15 під дією на Фіг.5 - елементі на Фіг.1; прикладеного осьового зусилля, переміщуючись на Фіг.6 - розріз А-А на Фіг.5; всередині верхньої осі 16 жорсткої рамки 9, перена Фіг.7 - вид А на Фіг.1; борюють зусилля пружин 17 стискання, фіксатори на Фіг.8 - розріз Б-Б на Фіг.7; 14 виводяться із зачеплення з глухими чашечками на Фіг.9 - розріз В-В на Фіг.8. 13. Утримувана за рукоятки 18 жорстка рамка 9 за Ручний господарський візок вміщує опорну допомогою прикладення зусилля в поздовжній раму 1, жорстко з'єднану з вантажонесучою платгоризонтальній площині переміщується таким чиформою 2, що містить в нижній частині упорний ном, щоб вісь 5 з ходовими колесами 4 зайняла 5 78324 6 необхідне положення за межами вантажонесучої міщення і взаємодії вільними кінцями з направляплатформи 2. При цьому тримачі 15 переміщуютьючими гільзами 7, жорстко закріпленими на ся в поздовжніх пазах 12 кронштейнів 11 до збіупорному елементі 3 в поздовжній горизонтальній гання фіксаторів 14 з необхідними порожнинами площині, забезпечують переміщення осі 5 з ходоглухи х чашечок 13, а направляючі стержні 6 висувими колесами 4 в поздовжній горизонтальній ваються із відповідних направляючих гільз 7 назоплощині при різних режимах координації осі 5 ховні. Знімається одночасно осьове зусилля з рукодових коліс 4 в залежності від габаритних розмірів яток 18. При цьому направляючі шайби 19 вантажу без додаткової підтримки візка сторонтримачів 15 під дією розпрямляючого зусилля ньою допомогою, дозволяючи вантажонесучій пружин 17 стискання переміщуються всередині платформі 2 знаходитись завжди в горизонтальверхньої осі 16 жорсткої рамки 9 і займають вихідному стані, що направлено на досягнення поставне положення. Фіксатори 14 взаємодіють в зачепленої задачі. Довжина напрямних стержнів 6 і глиленні з відповідними порожнинами глухи х чашечок бина напрямних гільз 7 вибираються таким чином, 13. Візок підготовлений для транспортування ванщоб забезпечити переміщення осі 5 з ходовими тажу. колесами 4 відносно вантажонесучої платформи 2 При низькому розташуванні центра ваги ванв широкому діапазоні, не погіршуючи при цьому тажу (див. Фіг.3) координація розташування ходожорсткість конструкції в цілому при крайньому вивих коліс 4 по відношенню до вантажонесучої пласун утому стані напрямних стержнів 6 із порожнин тформи 2 здійснюється наступним чином. напрямних гільз 7. Прикладається вручну одночасно осьове зусилля Підтримувальні кронштейни 8, які закріплені до рукояток 18 в протилежні сторони від візка. При знизу на вантажонесучій платформі 2 і підтримуцьому направляючі шайби 19 тримачів 15 під дією ють напрямні гільзи 7 в поздовжній горизонтальній прикладеного осьового зусилля, переміщуючись площині з одного боку і виконані з жорстким з'єдвсередині верхньої осі 16 жорсткої рамки 9, перенанням з кронштейнами 11 з другого боку, збільборюють зусилля пружин 17 стискання, фіксатори шують загальну жорсткість конструкції. 14 виводяться із зачеплення з глухими чашечками Жорстка рамка 9 змонтована за допомогою 13. Утримувана за рукоятки 18 жорстка рамка 9 за поперечної осі 10 на напрямних стержнях 6 між допомогою прикладення зусилля в поздовжній віссю 5 ходових коліс 4 і вільними кінцями направгоризонтальній площині переміщується таким чиляючих стержнів 6 забезпечує координацію осі 5 з ном, щоб вісь 5 з ходовими колесами 4 зайняла ходовими колесами 4 по відношенню до вантажонеобхідне положення під вантажонесучою платнесучої платформи 2 при різних режимах експлуаформою 2. При цьому тримачі 15 переміщуються в тації, забезпечуючи досягнення поставленої запоздовжніх пазах 12 кронштейнів 11 до збігання дачі. фіксаторів 14 з необхідними порожнинами глухих Ме ханізм фіксації забезпечує фіксацію жорстчашечок 13, а направляючі стержні 6 всовуються у кої рамки 9 з ходовими колесами 4 при заданих відповідні направляючі гільзи 7 всередину. Знімаумовах експлуатації в русі. ється одночасно осьове зусилля з рукояток 18. Таким чином, запропонований ручний госпоПри цьому направляючі шайби 19 тримачів 15 під дарський візок забезпечує виключення додаткової дією розпрямляючого зусилля пружин 17 стисканпідтримки візка з вантажем за допомогою стороння переміщуються всередині верхньої осі 16 жорсньої допомоги в статичному стані при переміщенні ткої рамки 9 і займають вихідне положення. Фіксаосі з ходовими колесами і виключає відхилення від тори 14 взаємодіють в зачепленні з відповідними горизонтального стану вантажонесучої платформи порожнинами глухи х ча шечок 13. Візок підготовлепри установці осі з ходовими колесами під вантаний для транспортування вантажу. жонесучою платформою або за її межами, підвиНаправляючі стержні 6, жорстко закріплені на щуючи зручність експлуатації і розширюючи ексосі 5 ходових коліс 4 поздовжньо по бокам в гориплуатаційні можливості. зонтальній площині з можливістю осьового пере 7 Комп’ютерна в ерстка Т.Чепелева 78324 8 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюHousehold barrow
Автори англійськоюKhudolii Oleksandr Ivanovych
Назва патенту російськоюРучная хозяйственная тележка
Автори російськоюХудолий Александр Иванович
МПК / Мітки
МПК: B62B 1/00
Мітки: господарський, візок, ручний
Код посилання
<a href="https://ua.patents.su/4-78324-ruchnijj-gospodarskijj-vizok.html" target="_blank" rel="follow" title="База патентів України">Ручний господарський візок</a>
Ручний господарський візок

Номер патенту: 27841
Опубліковано: 16.10.2000
Автор: Худолій Олександр Іванович
МПК: B62B 1/00
Мітки: ручний, господарський, візок
Формула / Реферат:
Ручний господарський візок, що містить опорну раму, спряжену з вантажонесучою платформою, поворотною в повздовжній вертикальній площині, яка має в нижній частині упорний елемент, несучу П - подібну рукоятку, телескопічно зв’язану з рамою з можливістю фіксації в потрібному положенні, і ходові колеса, який відрізняється тим, що ходові колеса змонтовані на вантажонесучій платформі з боку опорної рами, опорна рама виконана з можливістю...
Ручний господарський візок

Номер патенту: 78322
Опубліковано: 15.03.2007
Автор: Худолій Олександр Іванович
МПК: B62B 1/00
Мітки: ручний, господарський, візок
Формула / Реферат:
Ручний господарський візок, що містить опорну раму, з'єднану з вантажонесучою платформою, яка містить знизу упорні елементи, змонтовані поздовжньо по боках і виконані -подібними у вигляді шарнірних багатоланковиків, з'єднаних між собою в поперечній площині у вершинах за допомогою осі і шарнірно закріплених на осях на вантажонесучій платформі і опорній рамі з можливістю...
Ручний господарський візок

Номер патенту: 72247
Опубліковано: 15.02.2005
Автор: Худолій Олександр Іванович
МПК: B62B 1/00
Мітки: візок, ручний, господарський
Формула / Реферат:
1. Ручний господарський візок, що містить опорну раму, жорстко з’єднану з вантажонесучою платформою, яка містить знизу -подібні упорні елементи, змонтовані поздовжньо по боках, і ходові колеса на осі, змонтовані на вантажонесучій платформі з боку опорної рами, який відрізняється тим, що -подібні упорні...
Ручний вантажний візок

Номер патенту: 51042
Опубліковано: 15.11.2002
Автор: Ковбаснюк Микола Констянтинович
МПК: B62B 1/00
Мітки: вантажний, візок, ручний
Формула / Реферат:
Ручний вантажний візок, що містить П-подібну раму-рукоятку, два колеса, закріплені на кінцях рами співвісно, і вантажний пристрій, який відрізняється тим, що колеса закріплені на півосях з внутрішніх боків рами, вантажний пристрій виконаний у вигляді мішка циліндричної форми, причому довжина наповненого вантажем мішка дорівнює відстані між колесами, а на його торцях розташовані елементи кріплення до коліс.
Візок ручний

Номер патенту: 3333
Опубліковано: 15.11.2004
Автор: Файнгольд Володимир Маркусович
МПК: B62B 1/00
Формула / Реферат:
1. Візок ручний, що містить встановлену на двох ходових колесах жорстку раму, до якої приєднані бортові елементи, та П-подібну рукоятку, який відрізняється тим, що колеса візка закріплені на обертових осях, зміщених одна відносно одної у горизонтальній площині в напрямку поздовжньої осі візка і рівновіддалених відносно вертикальної площини симетрії рами, ободи коліс в діаметральному перерізі мають форму еліпса з горизонтально орієнтованою...
Попередній патент: Пристрій для відведення газів від коксової печі та форсунка, що входить до його складу
Наступний патент: Спосіб передачі дискретних електричних сигналів
Випадковий патент: Форсунка пісочної системи локомотива