Електромеханічний механізм натягу гусениць рушія бойової гусеничної машини
Номер патенту: 85666
Опубліковано: 25.02.2009
Автори: Лещенко Олег Іванович, Головань В'ячеслав Григорович, Янчик Олександр Григорович, Беліков Віктор Тріфонович, Магерамов Лютфалій Курбан-Алієвич, Дяченко Олександр Феодосьович

Формула / Реферат
1. Електромеханічний механізм натягу гусениці рушія бойової гусеничної машини, який складається з одного або декількох електродвигунів обертального типу і проміжних перетворювачів механічної енергії, який відрізняється тим, що проміжні перетворювачі механічної енергії виконані у вигляді однієї або декількох гвинтових передач, безпосередньо з приводним або приводними двигунами в один або декілька автономних електромеханізмів, механічно зв'язаних з віссю напрямного опорного колеса гусениці.
2. Електромеханічний механізм натягу гусениці рушія бойової гусеничної машини за п. 1, який відрізняється тим, що приводний гвинтовий електромеханізм механічно зв'язаний з віссю напрямного колеса за допомогою кривошипного механізму.
3. Електромеханічний механізм натягу гусениці рушія бойової гусеничної машини за п. 1, який відрізняється тим, що приводний гвинтовий електромеханізм забезпечений жорстким стрижнем, що знаходиться на вільному кінці приводного гвинта, безпосередньо сполученим з віссю напрямного колеса гусениці, розташованим в подовжньому пазу і що має додатково паралельну опору, так само розташовану в додатковому пазу.
4. Електромеханічний механізм натягу гусениці рушія бойової гусеничної машини за п. 1, який відрізняється тим, що електромеханічний гвинтовий привід має два приводні електродвигуни потужності, розташованих симетрично по обидві сторони рухомої осі напрямного опорного колеса, причому кінці гвинтів жорстко закріплені на внутрішній стороні відміченої осі.
5. Електромеханічний механізм натягу гусениці рушія бойової гусеничної машини за пп. 1 і 4, який відрізняється тим, що на осі напрямного колеса закріплена ходова гайка, а обидва приводні двигуни об'єднані загальним ходовим гвинтом, жорстко сполученим з валами електродвигунів.
Текст
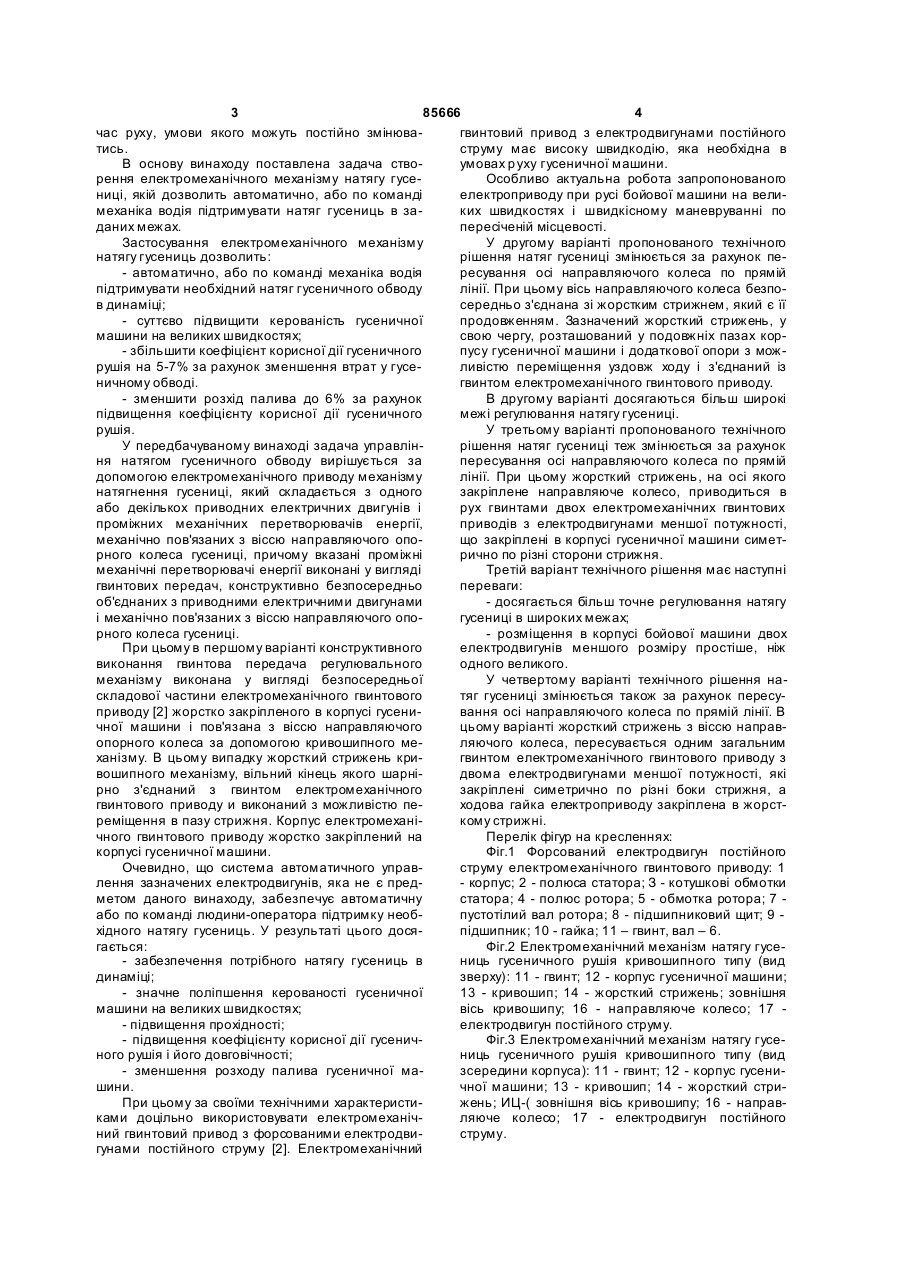
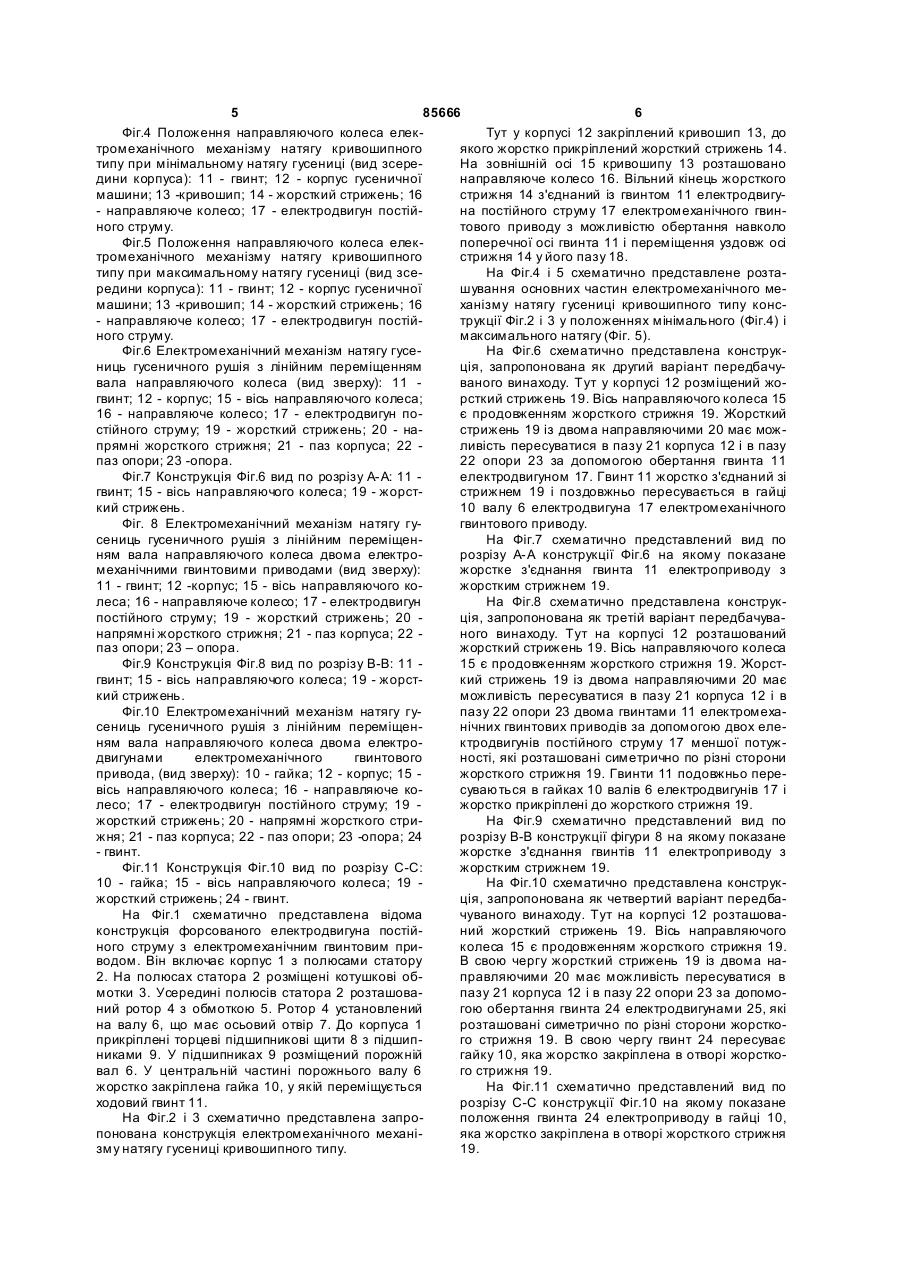
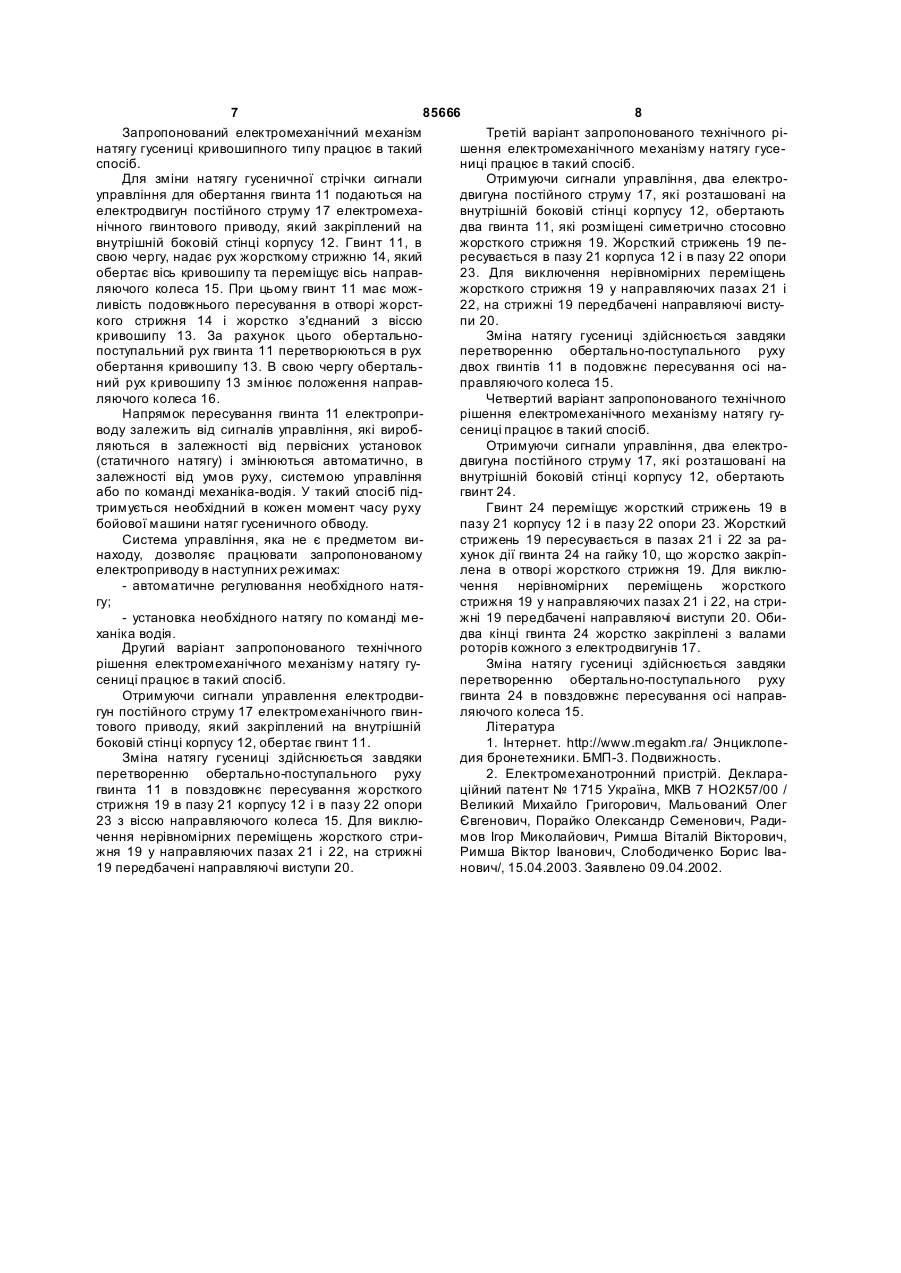
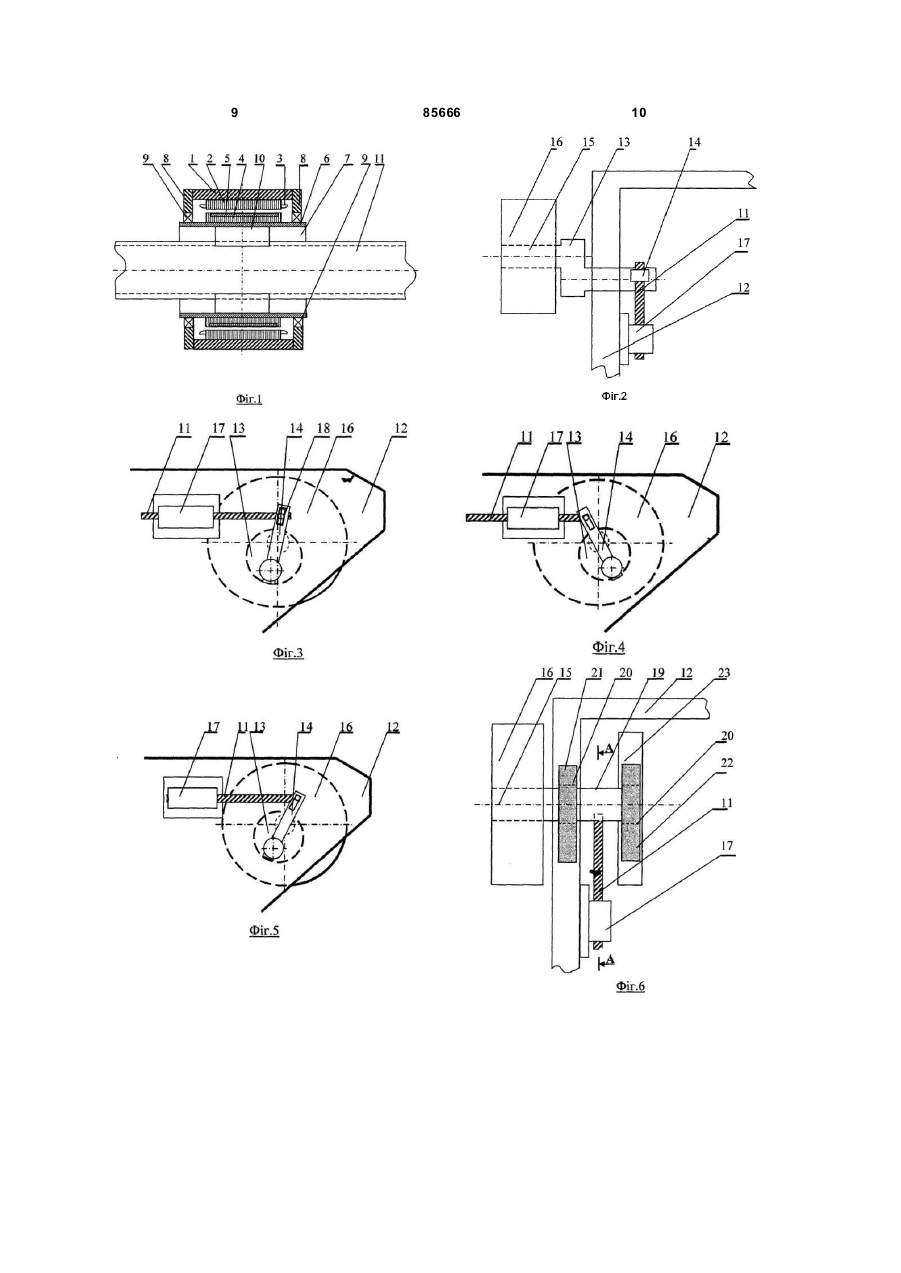
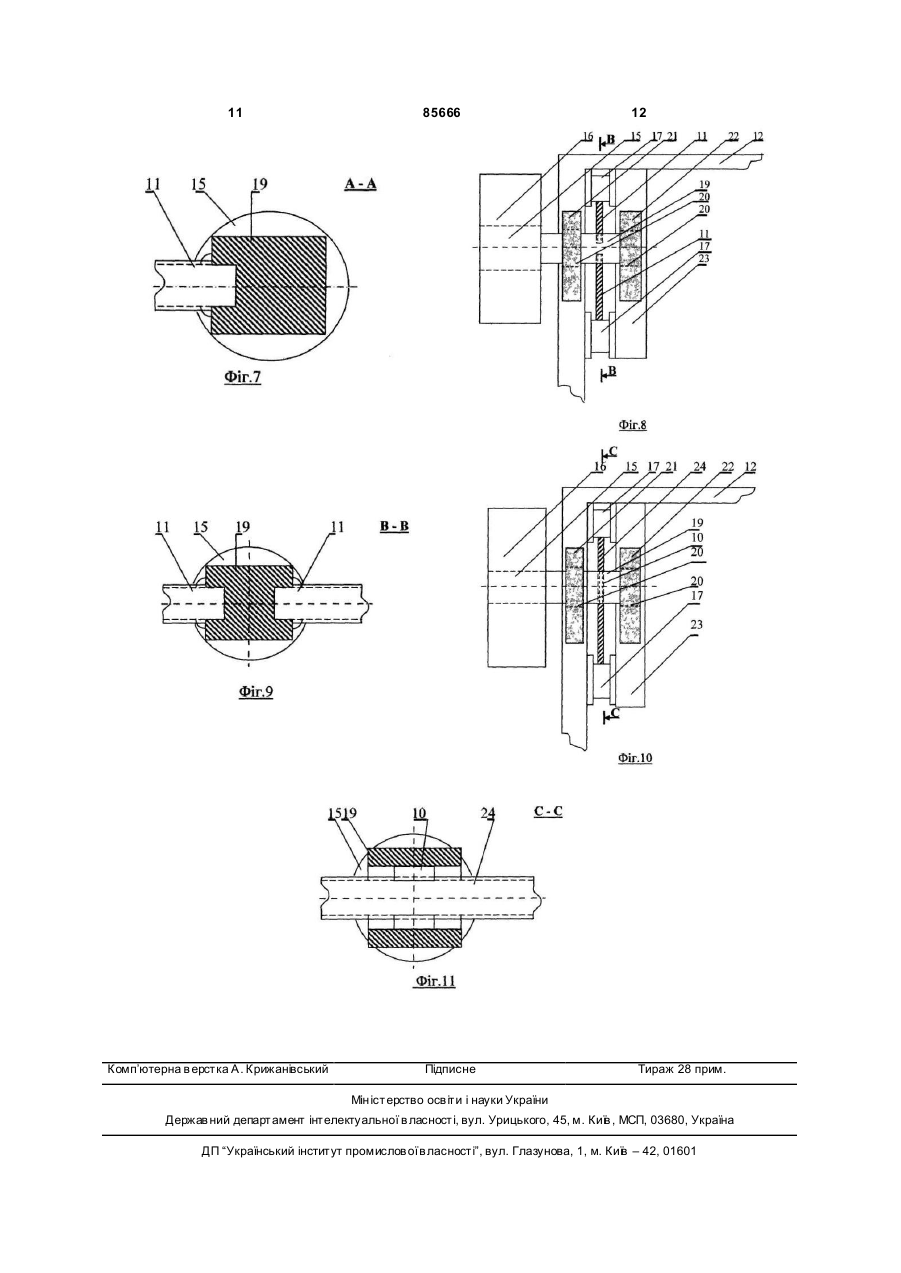
1. Електромеханічний механізм натягу гусениці рушія бойової гусеничної машини, який складається з одного або декількох електродвигунів обертального типу і проміжних перетворювачів механічної енергії, який відрізняється тим, що проміжні перетворювачі механічної енергії виконані у вигляді однієї або декількох гвинтових передач, безпосередньо з приводним або приводними двигунами в один або декілька автономних електромеханізмів, механічно зв'язаних з віссю напрямного опорного колеса гусениці. 2. Електромеханічний механізм натягу гусениці рушія бойової гусеничної машини за п. 1, який C2 2 (19) 1 3 85666 4 час руху, умови якого можуть постійно змінювагвинтовий привод з електродвигунами постійного тись. струму має високу швидкодію, яка необхідна в В основу винаходу поставлена задача ствоумовах р уху гусеничної машини. рення електромеханічного механізму натягу гусеОсобливо актуальна робота запропонованого ниці, якій дозволить автоматично, або по команді електроприводу при русі бойової машини на велимеханіка водія підтримувати натяг гусениць в заких швидкостях і швидкісному маневруванні по даних межах. пересіченій місцевості. Застосування електромеханічного механізму У другому варіанті пропонованого технічного натягу гусениць дозволить: рішення натяг гусениці змінюється за рахунок пе- автоматично, або по команді механіка водія ресування осі направляючого колеса по прямій підтримувати необхідний натяг гусеничного обводу лінії. При цьому вісь направляючого колеса безпов динаміці; середньо з'єднана зі жорстким стрижнем, який є її - суттєво підвищити керованість гусеничної продовженням. Зазначений жорсткий стрижень, у машини на великих швидкостях; свою чергу, розташований у подовжніх пазах кор- збільшити коефіцієнт корисної дії гусеничного пусу гусеничної машини і додаткової опори з можрушія на 5-7% за рахунок зменшення втрат у гуселивістю переміщення уздовж ходу і з'єднаний із ничному обводі. гвинтом електромеханічного гвинтового приводу. - зменшити розхід палива до 6% за рахунок В другому варіанті досягаються більш широкі підвищення коефіцієнту корисної дії гусеничного межі регулювання натягу гусениці. рушія. У третьому варіанті пропонованого технічного У передбачуваному винаході задача управлінрішення натяг гусениці теж змінюється за рахунок ня натягом гусеничного обводу вирішується за пересування осі направляючого колеса по прямій допомогою електромеханічного приводу механізму лінії. При цьому жорсткий стрижень, на осі якого натягнення гусениці, який складається з одного закріплене направляюче колесо, приводиться в або декількох приводних електричних двигунів і рух гвинтами двох електромеханічних гвинтових проміжних механічних перетворювачів енергії, приводів з електродвигунами меншої потужності, механічно пов'язаних з віссю направляючого опощо закріплені в корпусі гусеничної машини симетрного колеса гусениці, причому вказані проміжні рично по різні сторони стрижня. механічні перетворювачі енергії виконані у вигляді Третій варіант технічного рішення має наступні гвинтових передач, конструктивно безпосередньо переваги: об'єднаних з приводними електричними двигунами - досягається більш точне регулювання натягу і механічно пов'язаних з віссю направляючого опогусениці в широких межах; рного колеса гусениці. - розміщення в корпусі бойової машини двох При цьому в першому варіанті конструктивного електродвигунів меншого розміру простіше, ніж виконання гвинтова передача регулювального одного великого. механізму виконана у вигляді безпосередньої У четвертому варіанті технічного рішення наскладової частини електромеханічного гвинтового тяг гусениці змінюється також за рахунок пересуприводу [2] жорстко закріпленого в корпусі гусенивання осі направляючого колеса по прямій лінії. В чної машини і пов'язана з віссю направляючого цьому варіанті жорсткий стрижень з віссю направопорного колеса за допомогою кривошипного меляючого колеса, пересувається одним загальним ханізму. В цьому випадку жорсткий стрижень кригвинтом електромеханічного гвинтового приводу з вошипного механізму, вільний кінець якого шарнідвома електродвигунами меншої потужності, які рно з'єднаний з гвинтом електромеханічного закріплені симетрично по різні боки стрижня, а гвинтового приводу и виконаний з можливістю пеходова гайка електроприводу закріплена в жорстреміщення в пазу стрижня. Корпус електромеханікому стрижні. чного гвинтового приводу жорстко закріплений на Перелік фігур на кресленнях: корпусі гусеничної машини. Фіг.1 Форсований електродвигун постійного Очевидно, що система автоматичного управструму електромеханічного гвинтового приводу: 1 лення зазначених електродвигунів, яка не є пред- корпус; 2 - полюса статора; З - котушкові обмотки метом даного винаходу, забезпечує автоматичну статора; 4 - полюс ротора; 5 - обмотка ротора; 7 або по команді людини-оператора підтримку необпустотілий вал ротора; 8 - підшипниковий щит; 9 хідного натягу гусениць. У результаті цього досяпідшипник; 10 - гайка; 11 – гвинт, вал – 6. гається: Фіг.2 Електромеханічний механізм натягу гусе- забезпечення потрібного натягу гусениць в ниць гусеничного рушія кривошипного типу (вид динаміці; зверху): 11 - гвинт; 12 - корпус гусеничної машини; - значне поліпшення керованості гусеничної 13 - кривошип; 14 - жорсткий стрижень; зовнішня машини на великих швидкостях; вісь кривошипу; 16 - направляюче колесо; 17 - підвищення прохідності; електродвигун постійного струму. - підвищення коефіцієнту корисної дії гусеничФіг.3 Електромеханічний механізм натягу гусеного рушія і його довговічності; ниць гусеничного рушія кривошипного типу (вид - зменшення розходу палива гусеничної мазсередини корпуса): 11 - гвинт; 12 - корпус гусенишини. чної машини; 13 - кривошип; 14 - жорсткий стриПри цьому за своїми технічними характеристижень; ИЦ-( зовнішня вісь кривошипу; 16 - направками доцільно використовувати електромеханічляюче колесо; 17 - електродвигун постійного ний гвинтовий привод з форсованими електродвиструму. гунами постійного струму [2]. Електромеханічний 5 85666 6 Фіг.4 Положення направляючого колеса елекТут у корпусі 12 закріплений кривошип 13, до тромеханічного механізму натягу кривошипного якого жорстко прикріплений жорсткий стрижень 14. типу при мінімальному натягу гусениці (вид зсереНа зовнішній осі 15 кривошипу 13 розташовано дини корпуса): 11 - гвинт; 12 - корпус гусеничної направляюче колесо 16. Вільний кінець жорсткого машини; 13 -кривошип; 14 - жорсткий стрижень; 16 стрижня 14 з'єднаний із гвинтом 11 електродвигу- направляюче колесо; 17 - електродвигун постійна постійного струму 17 електромеханічного гвинного струму. тового приводу з можливістю обертання навколо Фіг.5 Положення направляючого колеса елекпоперечної осі гвинта 11 і переміщення уздовж осі тромеханічного механізму натягу кривошипного стрижня 14 у його пазу 18. типу при максимальному натягу гусениці (вид зсеНа Фіг.4 і 5 схематично представлене розтаредини корпуса): 11 - гвинт; 12 - корпус гусеничної шування основних частин електромеханічного мемашини; 13 -кривошип; 14 - жорсткий стрижень; 16 ханізму натягу гусениці кривошипного типу конс- направляюче колесо; 17 - електродвигун постійтрукції Фіг.2 і 3 у положеннях мінімального (Фіг.4) і ного струму. максимального натягу (Фіг. 5). Фіг.6 Електромеханічний механізм натягу гусеНа Фіг.6 схематично представлена конструкниць гусеничного рушія з лінійним переміщенням ція, запропонована як другий варіант передбачувала направляючого колеса (вид зверху): 11 ваного винаходу. Тут у корпусі 12 розміщений жогвинт; 12 - корпус; 15 - вісь направляючого колеса; рсткий стрижень 19. Вісь направляючого колеса 15 16 - направляюче колесо; 17 - електродвигун поє продовженням жорсткого стрижня 19. Жорсткий стійного струму; 19 - жорсткий стрижень; 20 - настрижень 19 із двома направляючими 20 має можпрямні жорсткого стрижня; 21 - паз корпуса; 22 ливість пересуватися в пазу 21 корпуса 12 і в пазу паз опори; 23 -опора. 22 опори 23 за допомогою обертання гвинта 11 Фіг.7 Конструкція Фіг.6 вид по розрізу А-А: 11 електродвигуном 17. Гвинт 11 жорстко з'єднаний зі гвинт; 15 - вісь направляючого колеса; 19 - жорстстрижнем 19 і поздовжньо пересувається в гайці кий стрижень. 10 валу 6 електродвигуна 17 електромеханічного Фіг. 8 Електромеханічний механізм натягу гугвинтового приводу. сениць гусеничного рушія з лінійним переміщенНа Фіг.7 схематично представлений вид по ням вала направляючого колеса двома електророзрізу А-А конструкції Фіг.6 на якому показане механічними гвинтовими приводами (вид зверху): жорстке з'єднання гвинта 11 електроприводу з 11 - гвинт; 12 -корпус; 15 - вісь направляючого кожорстким стрижнем 19. леса; 16 - направляюче колесо; 17 - електродвигун На Фіг.8 схематично представлена конструкпостійного струму; 19 - жорсткий стрижень; 20 ція, запропонована як третій варіант передбачуванапрямні жорсткого стрижня; 21 - паз корпуса; 22 ного винаходу. Тут на корпусі 12 розташований паз опори; 23 – опора. жорсткий стрижень 19. Вісь направляючого колеса Фіг.9 Конструкція Фіг.8 вид по розрізу В-В: 11 15 є продовженням жорсткого стрижня 19. Жорстгвинт; 15 - вісь направляючого колеса; 19 - жорсткий стрижень 19 із двома направляючими 20 має кий стрижень. можливість пересуватися в пазу 21 корпуса 12 і в Фіг.10 Електромеханічний механізм натягу гупазу 22 опори 23 двома гвинтами 11 електромехасениць гусеничного рушія з лінійним переміщеннічних гвинтових приводів за допомогою двох еленям вала направляючого колеса двома електроктродвигунів постійного струму 17 меншої потуждвигунами електромеханічного гвинтового ності, які розташовані симетрично по різні сторони привода, (вид зверху): 10 - гайка; 12 - корпус; 15 жорсткого стрижня 19. Гвинти 11 подовжньо перевісь направляючого колеса; 16 - направляюче косуваються в гайках 10 валів 6 електродвигунів 17 і лесо; 17 - електродвигун постійного струму; 19 жорстко прикріплені до жорсткого стрижня 19. жорсткий стрижень; 20 - напрямні жорсткого стриНа Фіг.9 схематично представлений вид по жня; 21 - паз корпуса; 22 - паз опори; 23 -опора; 24 розрізу В-В конструкції фігури 8 на якому показане - гвинт. жорстке з'єднання гвинтів 11 електроприводу з Фіг.11 Конструкція Фіг.10 вид по розрізу С-С: жорстким стрижнем 19. 10 - гайка; 15 - вісь направляючого колеса; 19 На Фіг.10 схематично представлена конструкжорсткий стрижень; 24 - гвинт. ція, запропонована як четвертий варіант передбаНа Фіг.1 схематично представлена відома чуваного винаходу. Тут на корпусі 12 розташоваконструкція форсованого електродвигуна постійний жорсткий стрижень 19. Вісь направляючого ного струму з електромеханічним гвинтовим приколеса 15 є продовженням жорсткого стрижня 19. водом. Він включає корпус 1 з полюсами статору В свою чергу жорсткий стрижень 19 із двома на2. На полюсах статора 2 розміщені котушкові обправляючими 20 має можливість пересуватися в мотки 3. Усередині полюсів статора 2 розташовапазу 21 корпуса 12 і в пазу 22 опори 23 за допомоний ротор 4 з обмоткою 5. Ротор 4 установлений гою обертання гвинта 24 електродвигунами 25, які на валу 6, що має осьовий отвір 7. До корпуса 1 розташовані симетрично по різні сторони жорсткоприкріплені торцеві підшипникові щити 8 з підшипго стрижня 19. В свою чергу гвинт 24 пересуває никами 9. У підшипниках 9 розміщений порожній гайку 10, яка жорстко закріплена в отворі жорстковал 6. У центральній частині порожнього валу 6 го стрижня 19. жорстко закріплена гайка 10, у якій переміщується На Фіг.11 схематично представлений вид по ходовий гвинт 11. розрізу С-С конструкції Фіг.10 на якому показане На Фіг.2 і 3 схематично представлена запроположення гвинта 24 електроприводу в гайці 10, понована конструкція електромеханічного механіяка жорстко закріплена в отворі жорсткого стрижня зму натягу гусениці кривошипного типу. 19. 7 85666 8 Запропонований електромеханічний механізм Третій варіант запропонованого технічного рінатягу гусениці кривошипного типу працює в такий шення електромеханічного механізму натягу гусеспосіб. ниці працює в такий спосіб. Для зміни натягу гусеничної стрічки сигнали Отримуючи сигнали управління, два електроуправління для обертання гвинта 11 подаються на двигуна постійного струму 17, які розташовані на електродвигун постійного струму 17 електромехавнутрішній боковій стінці корпусу 12, обертають нічного гвинтового приводу, який закріплений на два гвинта 11, які розміщені симетрично стосовно внутрішній боковій стінці корпусу 12. Гвинт 11, в жорсткого стрижня 19. Жорсткий стрижень 19 песвою чергу, надає рух жорсткому стрижню 14, який ресувається в пазу 21 корпуса 12 і в пазу 22 опори обертає вісь кривошипу та переміщує вісь направ23. Для виключення нерівномірних переміщень ляючого колеса 15. При цьому гвинт 11 має можжорсткого стрижня 19 у направляючих пазах 21 і ливість подовжнього пересування в отворі жорст22, на стрижні 19 передбачені направляючі вистукого стрижня 14 і жорстко з'єднаний з віссю пи 20. кривошипу 13. За рахунок цього обертальноЗміна натягу гусениці здійснюється завдяки поступальний рух гвинта 11 перетворюються в рух перетворенню обертально-поступального руху обертання кривошипу 13. В свою чергу обертальдвох гвинтів 11 в подовжнє пересування осі наний рух кривошипу 13 змінює положення направправляючого колеса 15. ляючого колеса 16. Четвертий варіант запропонованого технічного Напрямок пересування гвинта 11 електроприрішення електромеханічного механізму натягу гуводу залежить від сигналів управління, які виробсениці працює в такий спосіб. ляються в залежності від первісних установок Отримуючи сигнали управління, два електро(статичного натягу) і змінюються автоматично, в двигуна постійного струму 17, які розташовані на залежності від умов руху, системою управління внутрішній боковій стінці корпусу 12, обертають або по команді механіка-водія. У такий спосіб підгвинт 24. тримується необхідний в кожен момент часу руху Гвинт 24 переміщує жорсткий стрижень 19 в бойової машини натяг гусеничного обводу. пазу 21 корпусу 12 і в пазу 22 опори 23. Жорсткий Система управління, яка не є предметом вистрижень 19 пересувається в пазах 21 і 22 за ранаходу, дозволяє працювати запропонованому хунок дії гвинта 24 на гайку 10, що жорстко закріпелектроприводу в наступних режимах: лена в отворі жорсткого стрижня 19. Для виклю- автоматичне регулювання необхідного натячення нерівномірних переміщень жорсткого гу; стрижня 19 у направляючих пазах 21 і 22, на стри- установка необхідного натягу по команді межні 19 передбачені направляючі виступи 20. Обиханіка водія. два кінці гвинта 24 жорстко закріплені з валами Другий варіант запропонованого технічного роторів кожного з електродвигунів 17. рішення електромеханічного механізму натягу гуЗміна натягу гусениці здійснюється завдяки сениці працює в такий спосіб. перетворенню обертально-поступального руху Отримуючи сигнали управлення електродвигвинта 24 в повздовжнє пересування осі направгун постійного струму 17 електромеханічного гвинляючого колеса 15. тового приводу, який закріплений на внутрішній Література боковій стінці корпусу 12, обертає гвинт 11. 1. Інтернет. http://www.megakm.ra/ ЭнциклопеЗміна натягу гусениці здійснюється завдяки дия бронетехники. БМП-3. Подвижность. перетворенню обертально-поступального руху 2. Електромеханотронний пристрій. Декларагвинта 11 в повздовжнє пересування жорсткого ційний патент № 1715 Україна, МКВ 7 НО2К57/00 / стрижня 19 в пазу 21 корпусу 12 і в пазу 22 опори Великий Михайло Григорович, Мальований Олег 23 з віссю направляючого колеса 15. Для виклюЄвгенович, Порайко Олександр Семенович, Радичення нерівномірних переміщень жорсткого стримов Ігор Миколайович, Римша Віталій Вікторович, жня 19 у направляючих пазах 21 і 22, на стрижні Римша Віктор Іванович, Слободиченко Борис Іва19 передбачені направляючі виступи 20. нович/, 15.04.2003. Заявлено 09.04.2002. 9 85666 10 11 Комп’ютерна в ерстка А. Крижанівський 85666 Підписне 12 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюElectro-mechanical track tension device of running gear of combat tracked vehicle
Автори англійськоюBelikov vyktor Tryfonovych, Holovan Viacheslav Hryhorovych, Diachenko Oleksandr Feodosiiovych, Leschenko Oleh Ivanovych, Maheramov Liutfalii Kurban-Aliiovych, Yanchyk Oleksandr Hryhorovych
Назва патенту російськоюЭлектромеханический механизм натяжения гусениц движителя боевой гусеничной машины
Автори російськоюБеликов Виктор Трифонович, Головань Вячеслав Григорьевич, Дьяченко Александр Феодосьевич, Лещенко Олег Иванович, Магерамов Лютфалий Курбан-Алиевич, Янчик Александр Григорьевич
МПК / Мітки
МПК: F41H 7/00
Мітки: натягу, гусеничної, машини, рушія, гусениц, механізм, електромеханічний, бойової
Код посилання
<a href="https://ua.patents.su/6-85666-elektromekhanichnijj-mekhanizm-natyagu-gusenic-rushiya-bojjovo-gusenichno-mashini.html" target="_blank" rel="follow" title="База патентів України">Електромеханічний механізм натягу гусениць рушія бойової гусеничної машини</a>
Електромеханічний силовий блок багатокоординатного тренажера гусеничної машини
Номер патенту: 49720
Опубліковано: 16.09.2002
Автори: Бєліков Віктор Трифонович, Ярмолюк Вадим Михайлович
МПК: G09B 9/04
Мітки: гусеничної, тренажера, багатокоординатного, блок, силовий, електромеханічний, машини
Формула / Реферат:
Електромеханічний силовий блок багатокоординатного тренажера гусеничної машини, що містить основу, на якій встановлений двокоординатний електричний привід горизонтальних переміщень та обертів з опорною платформою трьох розташованих симетрично по колу механізмів вертикального підйому, на кінцевих опорних вузлах яких шарнірно закріплена верхня площадка з кабіною, в якій знаходиться місце оператора, який відрізняється тим, що на шляховій...
Навчально-тренувальний стенд ходової частини і трансмісії гусеничної машини
Номер патенту: 547
Опубліковано: 15.09.2000
Автори: Большаков Анатолій Костянтинович, Образцов Володимир Іванович
МПК: G09B 9/04
Мітки: стенд, частини, трансмісії, навчально-тренувальний, машини, ходової, гусеничної
Формула / Реферат:
1. Навчально-тренувальний стенд ходової частини і трансмісії гусеничної машини, що містить штатні напрямне та ведуче колеса, механізм натягування, опорні та підтримувальний котки, траки гусениці, підвіски та коробку передач, який відрізняється тим, що стенд обладнаний штатними гідравлічними амортизаторами та штатною бортовою передачею, виконаною зі штатними коробкою передач і ведучим колесом, при цьому, принаймні, в одному з перелічених...
Панель керування гусеничної машини
Номер патенту: 23761
Опубліковано: 11.06.2007
Автори: Бобровський Олександр Іванович, Кузнєцов Геннадій Олександрович, Волосніков Сергій Олександрович, Павленко Сергій Анатолійович, Фурсов Олександр Анатолійович, Бондар Олександр Іванович
МПК: B60K 37/00
Мітки: панель, машини, керування, гусеничної
Формула / Реферат:
1. Панель керування гусеничної машини, призначена для передачі інформації водію про стан основних агрегатів і систем за допомогою контрольних приладів (8), сигналізаторів (4), а також для керування різними системами гусеничної машини за допомогою органів керування (5) і автоматів захисту (6), розташованих на пультах керування (2) та індикації (3), яка відрізняється тим, що органи керування (5) розміщуються на пультах керування (2)...
Відсікач породи гусеничної ходової частини гірничої машини

Номер патенту: 21515
Опубліковано: 15.03.2007
Автори: Нагорний Владислав Віталійович, Бєлов Сергій Генадійович, Ситнік Анатолій Володимирович, Мізін Вадим Олександрович, Філоненко Євген Михайлович
МПК: E21C 29/00
Мітки: ходової, частини, відсікач, гусеничної, машини, породи, гірничої
Формула / Реферат:
1. Відсікач породи гусеничної ходової частини гірничої машини, що містить скребок, який відрізняється тим, що зі скребком через перемичку жорстко з’єднані внутрішня і зовнішня боковини, із зовнішньою боковиною з’єднаний щиток, при цьому боковини мають співвісні отвори для встановлення відсікача на осі найближчого до привідної зірки котка гусеничної ходової частини гірничої машини.2. Відсікач за п. 1, який відрізняється тим, що щиток...
Привід ходової частини гусеничної машини
Номер патенту: 6452
Опубліковано: 16.05.2005
Автори: Полунін Сергій Андрійович, Лисак Дмитро Анатолійович, Пальчик Володимир Станіславович, Мізін Вадим Олександрович
МПК: E21C 31/00, E21F 13/00
Мітки: гусеничної, частини, привід, ходової, машини
Формула / Реферат:
Привід ходової частини гусеничної машини, що містить циліндро-планетарний редуктор, обладнаний зубчастою муфтою, двигун із привідною шестірнею, кінематично зв'язаною з вхідним колесом планетарного модуля редуктора, що має зубчасту обойму внутрішнього зачеплення, з’єднану з зубчастою муфтою, і гальмо, який відрізняється тим, що двигун і гальмо пристиковані зовні до корпусу редуктора, привідна шестірня двигуна знаходиться в безпосередньому...
Попередній патент: Рідкі водні суспензії мінеральних наповнювачів, їх одержання та застосування
Наступний патент: Облицювальна панель (варіанти)
Випадковий патент: П`єзоелектричний перетворювач механічних величин