Пристрій для пересування хворих
Номер патенту: 8617
Опубліковано: 30.09.1996
Автори: Булянда Ірина Яківна, Донбай Володимир Антонович, Носуля Володимир Олександрович, Сальникова Людмила Григорівна, Страхов Анатолій Борисович
Формула / Реферат
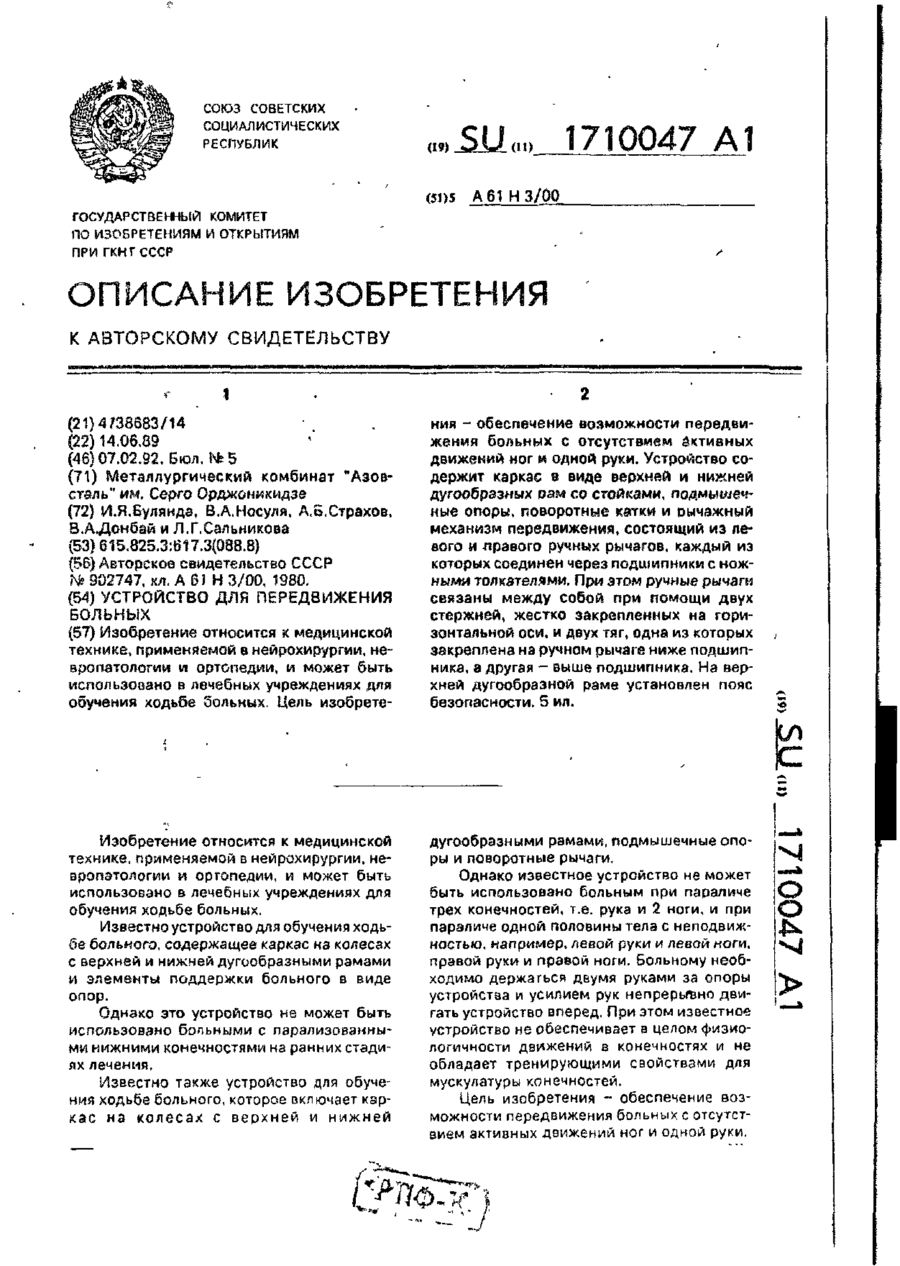
Устройство для передвижения больных, содержащее каркас в виде верхней и нижней дугообразных рам со стойками, подмышечные опоры, поворотные катки и рычажный механизм передвижения с ножными толкателями, отличающееся тем, что, с целью обеспечения возможности передвижения больных с отсутствием активных движений ног й одной руки, рычажный механизм передвижения выполнен в виде левого и правого ручных рычагов, каждый из которых соединен через подшипники с ножными толкателями, причем левый и правый ручные рычаги связаны между собой при помощи двух стержней, жестко закрепленных на горизонтальной оси, и двух тяг, одна из которых закреплена на ручном рычаге ниже подшипника, а другая - выше подшипника, а на верхней дугообразной раме каркаса установлен пояс безопасности.
Текст
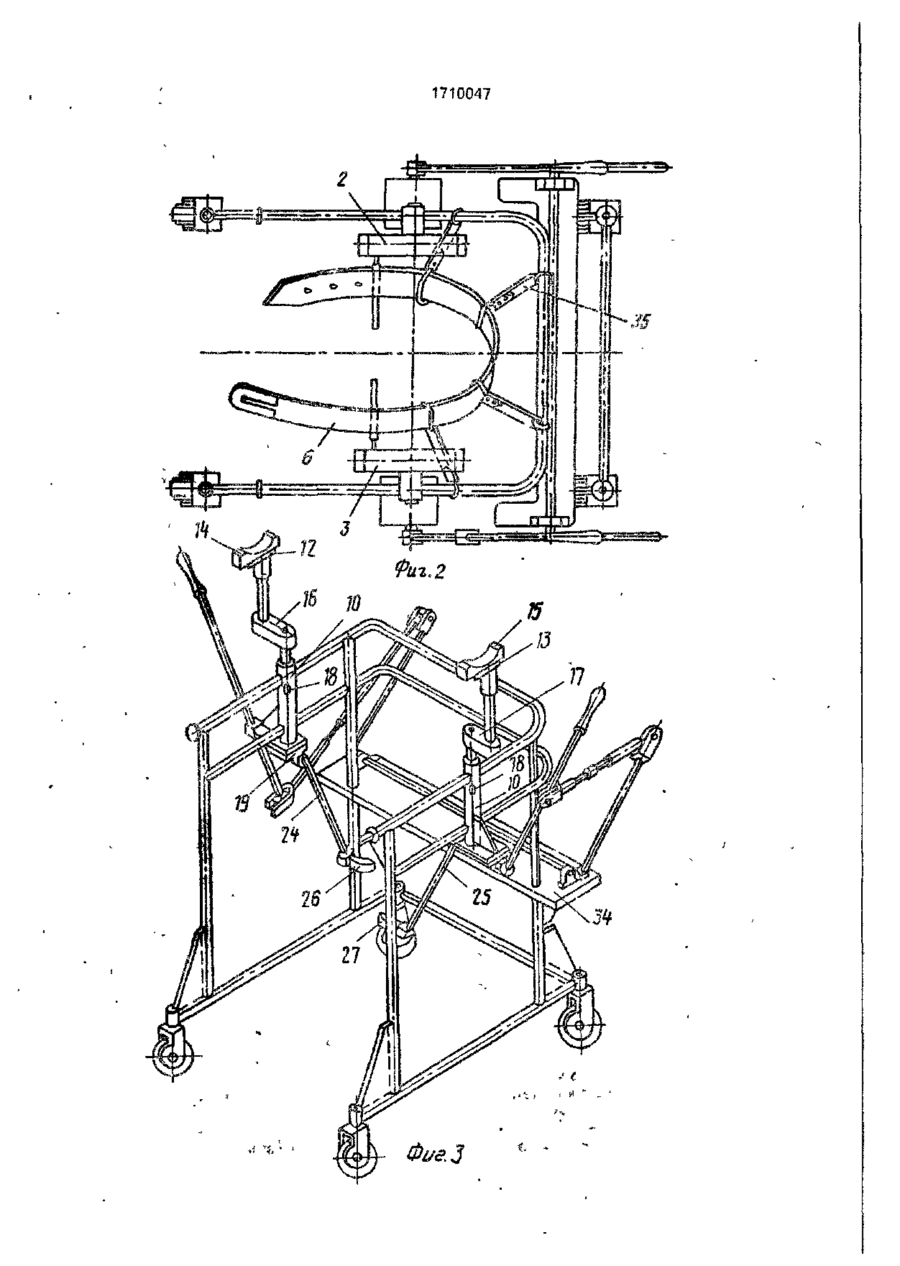
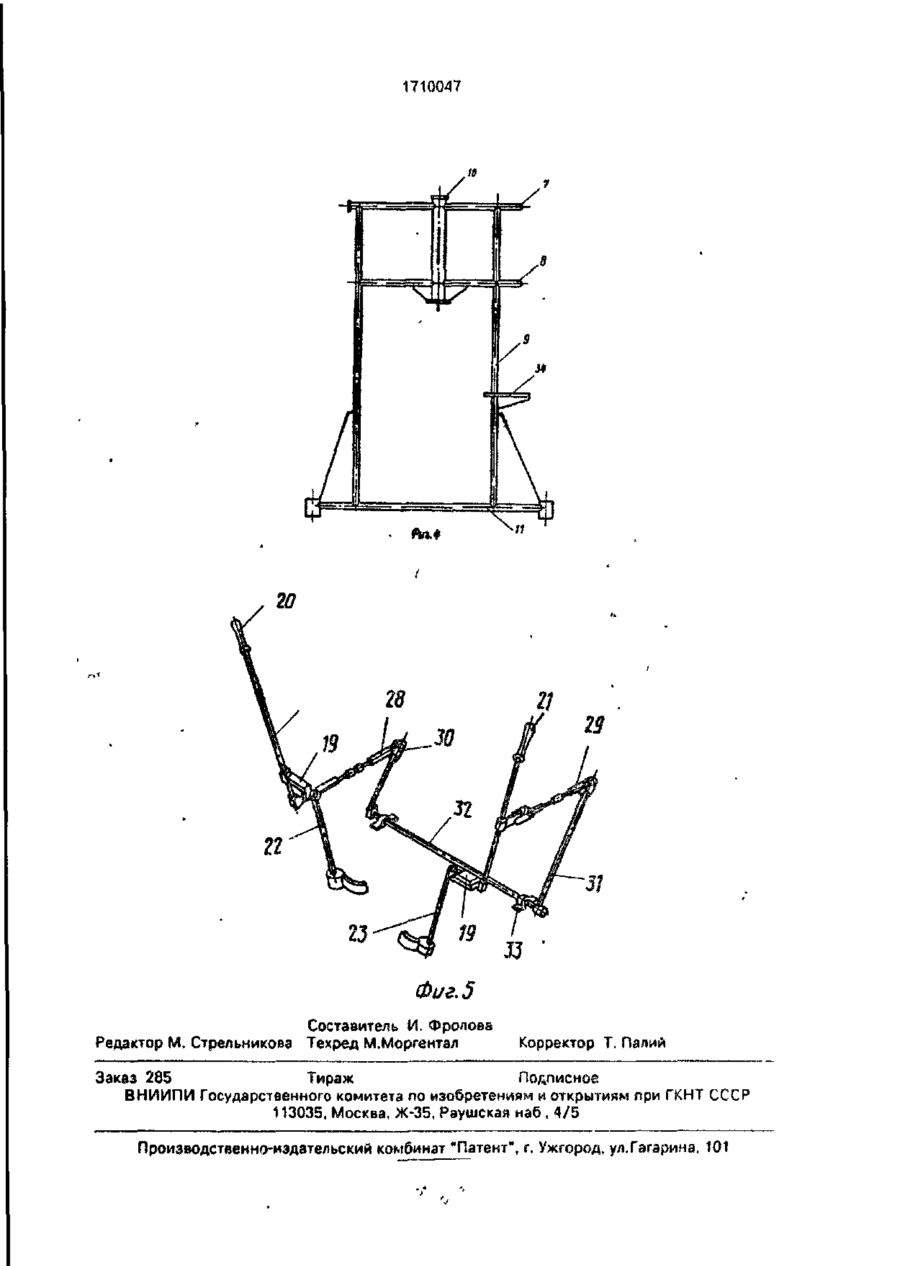
Изобретение относится к медицинской технике, применяемой в нейрохирургии, невропатологии и ортопедии, и может быть использовано в лечебных учреждениях для обучения ходьбе Зольных. Цель изобрете ния - обеспечение возможности передвижения больных с отсутствием Активных движений ног и одной руки. Устройство содержит каркас в виде верхней и нижней дугообразных рам со стойками, подмышечные опоры, поворотные катки и рычажный механизм передвижения, состоящий из левого и лравого ручных рычагов, каждый из которых соединен через подшипники с ножными толкателями. При этом ручные рычаги связаны между собой при помощи двух стержней, жестко закрепленных на горизонтальной оси, и двух тяг, одна из которых закреплена на ручном рычаге ниже подшипника, а другая - выше подшипника. На верхней дугообразной раме установлен пояс безопасности. 5 ил. Изобретение относится к медицинской технике, применяемой в нейрохирургии, невропатологии и ортопедии, и может быть использовано в лечебных учреждениях для обучения ходьбе больных. Известно устройство для обучения ходьбе больного, содержащее каркас на колесах с верхней и нижней дугообразными рамами и элементы поддержки больного в виде опор. Однако это устройство не может быть использовано больными с парализованными нижними конечностями на ранних стадиях лечения. Известно также устройство для обучения ходьбе больного, которое включает каркас на колесах с верхней и нижней дугообразными рамами, подмышечные опоры и поворотные рычаги. Однако известное устройство не может быть использовано больным при параличе трех конечностей, т.е. рука и 2 ноги, и при параличе одной половины тела с неподвижностью, например, левой руки и левой ноги, правой руки и правой ноги. Больному необходимо держаться двумя руками за опоры устройства и усилием рук непрерывно двигать устройство вперед. При этом известное устройство не обеспечивает в целом физиологичности движений в конечностях ІЛ не обладает тренирующими свойствами для мускулатуры конечностей. Цель изобретения - обеспечение возможности передвижения больных с отсутствием активных движений ног и одной руки. з 1710047 Устройство работает следующим обраУказанная цель достигается тем, что в зом. известном устройстве дл* передвижения больных, содержащем каркас, включающий Больному, перенесшему заболевание, верхнюю и нижнюю дугообразные рамы со повлекшее паралич 3-х конечностей, т е. рустойками, подмышечные опоры, поворот- 5 ке и 2 ноги, или острое нзрушение мозгового ные катки и рычажный механизм передвикровообращения с левосторонней (правожения с ножными толкателями, рычажный сторонней) гемиплегией, т.е. левая нога и механизм передвижения выполнен а виде левая рука (правая рука м правая нога) нелевого и правого ручных рычагов, каждый из подвижны, укрепляют голеностопные сустакоторых соединен через подшипники с нож- 1 Л вы посредством наложения 8-образной нымч толкателями, причем левый и правый повязки или эластичным бинтом (не показаручные рычаги связаны между собой при ны) и заводят при помощи родственников помощи деух стержней, месгко закреплен или медперсонала в устройство для переныхн9 горизонтальной оси, и двух і яг, одна движения больных Затем застегивают в из которых закреплена на ручном рычаге (S области талии пояс 6 безопасности и устаниже подшипника, а другая - выше подшипнавливают больного так, чтобы подмышечника, а на верхней дугообразной раме карные ападины удерживались колодками 12 и каса установлен пояс безопасности. 13, которые отрегулі/.ровзньі по росту w полноте больного с помощью валиков 14 и 15 и На фмг. 1 изображено предложенное устройство, вид сбоку; на фиг. 2 -тоже, вид ?iv эксцентриков 16 и 17 При этом кмсти рук больного обхватывают левый 20 и правый 21 сверху; нзфиг, 3-то же, аксонометрическое руїньїе рычаги, а лопатки 26 и 27 ножных изображение; на фмг. 4 - каркас; на фиг. 5 толкателей 22 и 23 устанавливают и фиксирычажный механизм передвижения. руют в горизонтальном положении за его Устройство содержит каркас 1, подмышечные опоры 2 и 3, поворотные катки 4, 25 икроножные мышцы. Затем больной самостоятельно или с помошьга медперсонала рычажный механизм 5 передвижения и пояс смещает свой центр тяжести на соответсі6 безопасности. вующую здоровой руке йогу, выполняющую Каркас 1 состоит из верхней! и нижнем 8 данный мог/.ент функцию опорной, путем 8 дугообразных рам, соединенных сіойками 9 м 10, и перемычки 11. Каркас опирается на- 30 наклона туловища в нужном направлении, например вправс-аперед, если здоровая руповоротные катки 4 (фмг. 1), установленные ка - правая. на плоскость пола На верхней 7 и нижней 8 дугообразных рамах смонтированы подмы Дальнейшая работа устройства, если у шечные опоры 2 и 3, состагіцие из колодок больного паоалич двух ног и левой руки, 12 м 13 с аэликами 14 и 15 и эксцентриков 35 следующая . усилием здоровой правой руки І6 w 17, телескопически связанных со стойбольной двигает вперед отсеоя' на произками Юм фиксируемых в заданном положевольный угол правый ручной рычаг 21. При ние фиксатоо&ми 18. В нижних частях стоек этом в результате жесткости рычажного ме10 укреплены подшипники 19 (фиг, 3) ханизма 5 передвижения происходит отвод Рычажный механизм 5 передвижения 40 лопатки 27 правого ножного толкателя 23 от больного выполнен в виде левого 20 и праикроножной мышцы правой ноги и движевого 21 ручных рычагов, каждый мз которых ние вперед тяги 29, которая поворачивает соединен через подшипники 19 с ножными на угол а стержни 30 и 31 с горизонтальной толкателями 22 и 23. Последние выполнены осью 32 и перемещает вперед тягу 28, за в виде стержней 24 м 25 с поворотными 45 счет чего происходит поворот левого рычага лопатками 26 и 2 Ї (фиг. 3), в которые вмон20 с больной рукой на угол «наззд "на себя" тированы фиксаторы положения (не показаи движение левой ногм на шаг или полшага ны). На левом 20 и на правом 21 ручные вперед с помощью лопатки 26 левого ножрычагах (фиг 5} шарнирно укреплены выше ного толкателя 22 После этого больной пещ ниже подшипников 19 ТЯІИ 28 и 29, к ремещает центр тяжести на левую ногу и которым шарнирно присоедиг.еьы стержни 50 она становится опорной Затем больной 30 и 31, жестко закрепленные к горизондвигает здоровой ругой правый ручной рытальной оси 32 Горузонтаіьнсіпось32 уста чаг 21 назад "на себя" и правый ножной нойлена в подшипниках 33, толкатель 23 подает правою ногу на шаг мли смонтированных на кронштейне 34 (фиг. 3} полшага вперед. При этом работа рычажножестко связанном со стойками 9 каркаса 1- 5? го механизма 5 повторяется но в обратной последовательности. Пояс 6 безопасности, например, г^з ломгг прикреплен к верхней 7 дугообразной Если у больної о паралич двух ног и пра1 вий руки, работа устройства следующая : 1710047 усилием здоровой левой руки больной'двигает вперед "от себя" на произвольный угол левый ручной рычаг 20. При этом в результате жесткости рычажного механизма 5 передвижения происходит отвод лопатки 26 левого ножного толкателя 22 от икроножной мышцы левой ноги и движение назад тяги 28, ^.отсрая ггоаорачмвзет на угол а стержни 30 и 31 с горизонтальной осью 32 м'перемещэет ЙЕЭЭД ч^гу 23, за счет чего происходит поворот правого ручного рычага 21 с больной провей рукой на угол а назад "на себя" и движение праэой чоги на war или полшага вперед с помощью лопатки 27 правого ножного тол кате ія 23, После этого больной перемещвег центр тяжести на правую ногу и ока становится опорной. Затем больной двигаот здоровой рукой лезый ручной рычаг 20 назад "на езбй" и лееый ножной толкатель 22 подает левую могу на шаг или полшага вг*вре#. При этом работа рычажного механизма 5 повторяется, но а обратной последователь кости. 5 10 15 20 Таким образом, при движении вперед левого 20 twin правого 2Ї ручных рычагов 25 происходит перемещение вперед устройства на поворотных каїках. Предлагаемое устройство должно обеспечить выполнение двух функций: разработку парализованных ног и одной ру- 30 ки с помощью одной здоровой руки и возможность регулировки ширины шага и высоты подъема ноги, близкой к функциональной ходьбе. При этом больной может самостоятельно управлять передвижением в устройстве и автономно передвигать каждую ногу и руку, разрабатывая парализованные конечностмФормула изобретения Устройство дчя пйредвмжгзяяя больных, содержащее каркас в киде верхней и нижней дугообразный рам со стойками, подмышечные опоры, поворотные катки и рычажный механизм передвижения с ножиыкш тол&зтеяямуз, о т і н ч а ю щ е е с я тем, что, с целью обоспечекня возможности пэредвижеи-ия больных с отсутствием активних движений ног и одной руки, рычажчый механизм передвижения выполнен s «иде левого и правого р у ч н ь ; к рымзгоз. каждый из которых соединен через подшипники с ножными толкателями, причем левый и правый ручные рычаги связаны между собой при помощи дезух стержней, жестко закрепленных на горизонтальной оси, и двух тяг, одна из которых закреплена на ручном рычаге ниже подшмпниха, а другая выше подшипника, а на аерхней дугоооразной раме каркаса установлен пояс безопасности. 1710047 J 1710047 1710047 22 23 Фиг. 5 Редактор М. Стрельникова Составитель И. Фролова Техред М.Моргентал Корректор Т. Палий Заказ 285 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб , 4/5 Производственно-издательский комбинат "Патент", г. Ужгород, уя.Гагарина, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for the movement of patients
Автори англійськоюBulianda Iryna Yakivna, Strakhov Anatolii Borysovych, Donbai Volodymyr Antonovych, Salnykova Liudmyla Hryhorivna
Назва патенту російськоюУстройство для передвижения больных
Автори російськоюБулянда Ирина Яковлевна, Страхов Анатолий Борисович, Донбай Владимир Антонович, Сальникова Людмила Григорьевна
МПК / Мітки
МПК: A61H 3/00
Мітки: пристрій, пересування, хворих
Код посилання
<a href="https://ua.patents.su/6-8617-pristrijj-dlya-peresuvannya-khvorikh.html" target="_blank" rel="follow" title="База патентів України">Пристрій для пересування хворих</a>
Пристрій для переміщення і обслуговування хворих
Номер патенту: 4475
Опубліковано: 27.12.1994
Автор: Монда Юрій Юрійович
МПК: A61G 7/10
Мітки: пристрій, обслуговування, хворих, переміщення
Формула / Реферат:
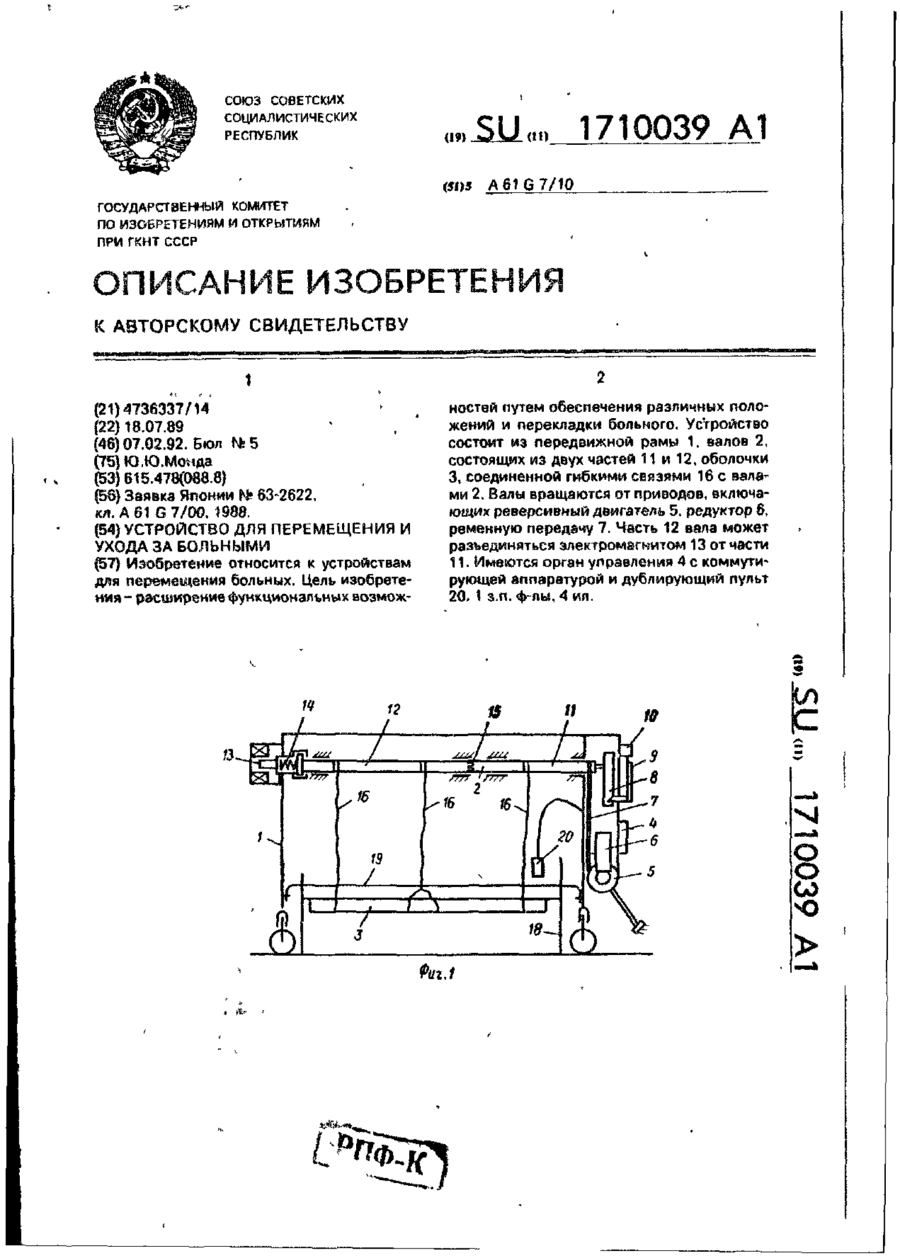
1. Устройство для перемещения и ухода за больными, содержащее передвижную раму с двумя валами, эластичную оболочку, установленную на валах, и органы управления, отличающееся тем, что, с целью расширения функциональных возможностей путем обеспечения различных положений и перекладок больного, каждый вал снабжен реверсивным приводом, эластичная оболочка выполнена съемной, а соединение оболочки с валами выполнено в виде гибких связей.2....
Пристрій для шагового пересування “шагопед”
Номер патенту: 7067
Опубліковано: 31.03.1995
Автор: Осадчій Євгеній Олександрович
МПК: A63B 25/00
Мітки: пристрій, пересування, шагового, шагопед
Текст:
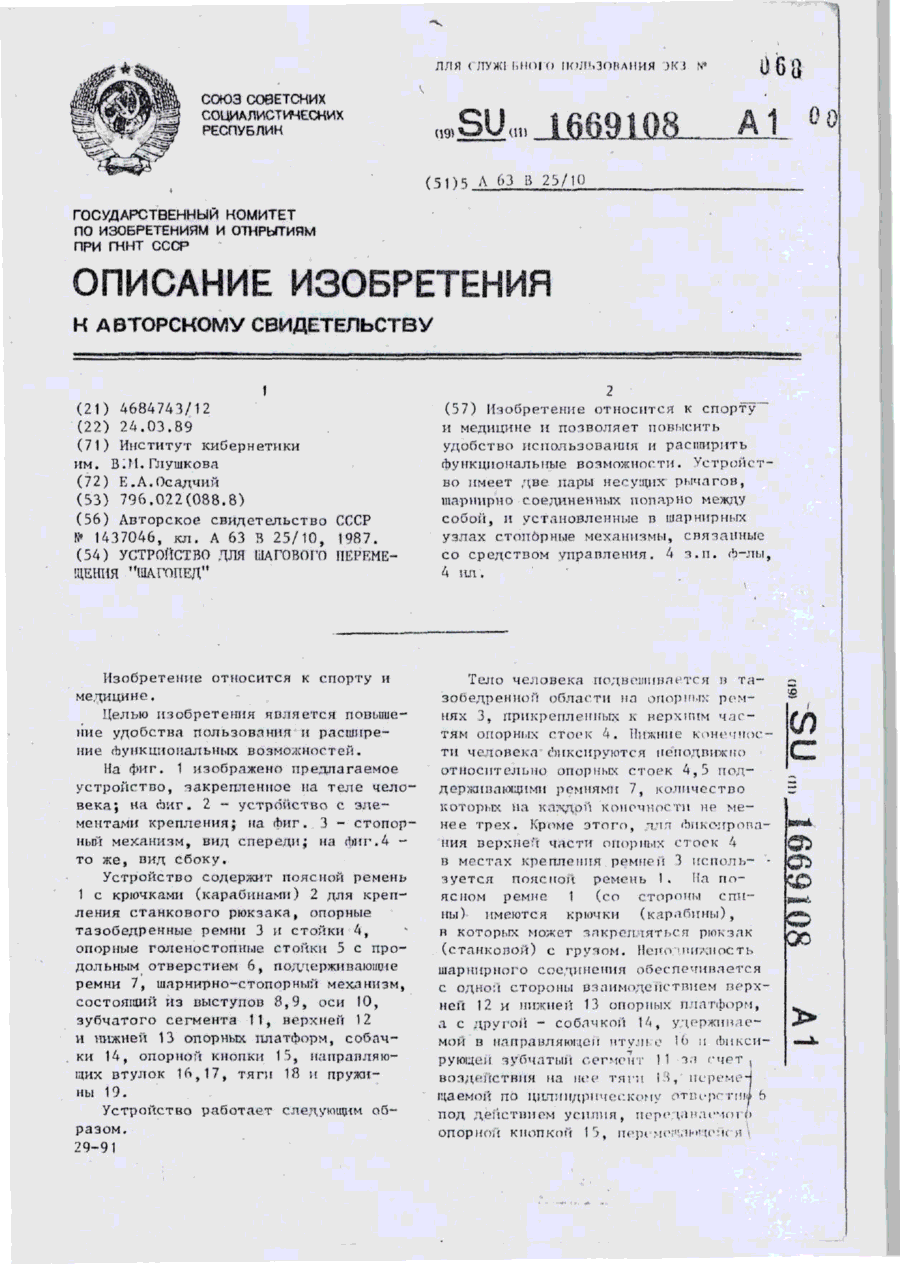
...и освобождением за счетбодного расправления конечности в коэтого опорной кнопки 15, расположен- ЗО ленном суставе (в сторону совпадения ной на стойке 5 другой конечности продольных осей стоек 4,5). Тем самым (так как на нее не воздействует массы усилия мышц опорной ноги частично остела и груза). Освобожденная кнопка 15 вобождаются от поддержания массы тела под действием пружины 19 перемещается и г вдоль втулки 17 и выдвигается из ниж- 35...
Механізм пересування крана
Номер патенту: 2292
Опубліковано: 26.12.1994
Автори: Бик Аркадій Рувимович, Белов Олександр Іванович, Сербаєв Петро Миколайович
МПК: B66C 9/00
Мітки: крана, пересування, механізм
Формула / Реферат:
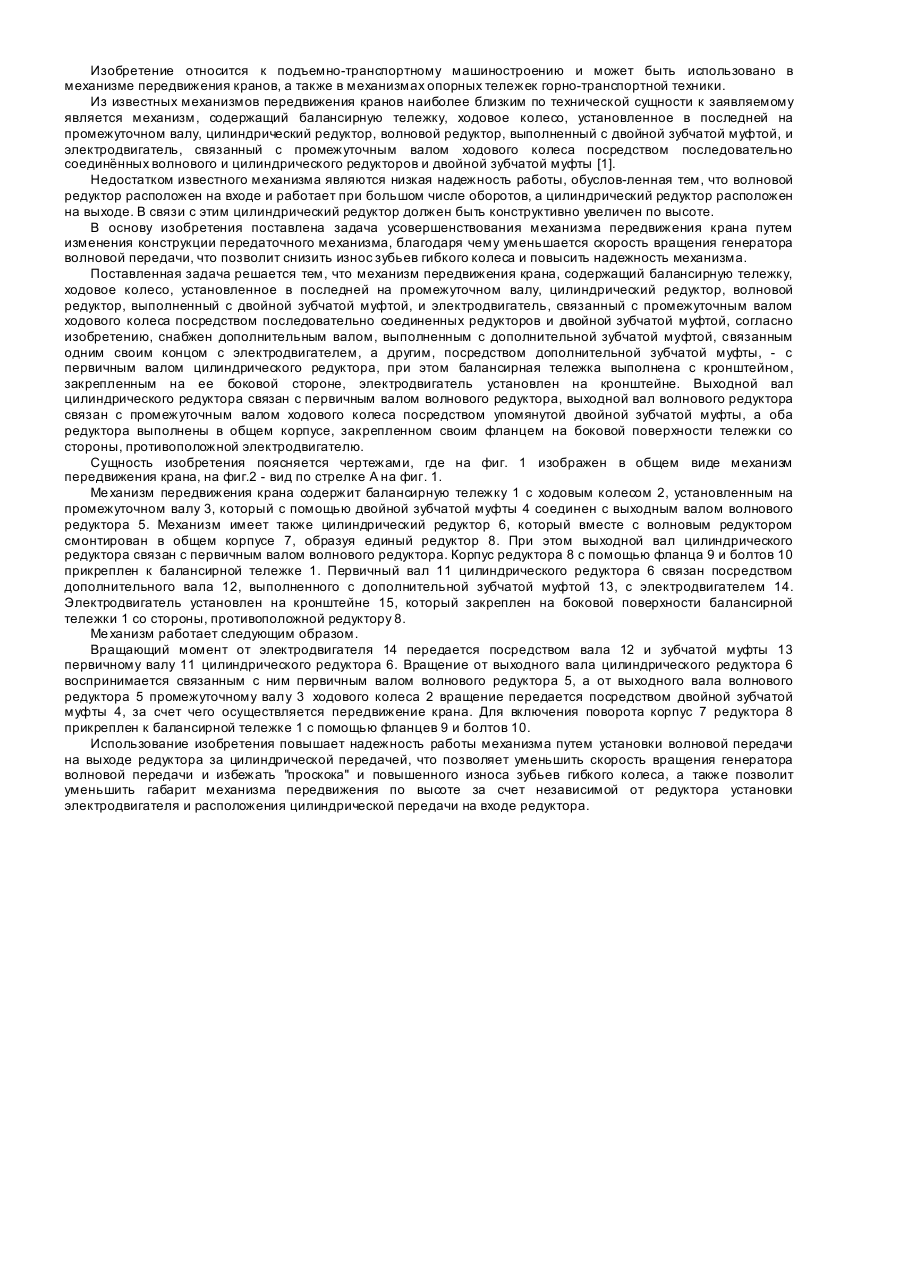
Механизм передвижения крана, со держащий балансирную тележку, ходовое колесо, установленное в последней на промежуточном валу, цилиндрический редуктор, волновой редуктор, выполненный с двойной зубчатой муфтой, и электродвигатель, связанный с промежуточным валом ходового колеса посредством последовательно соединенных редукторов и двойной зубчатой муфтой, отличающийся тем, что он снабжен дополнительным валом, выполненным с дополнительной...
Пристрій для лікування хворих з порушенням пози і рухової активності
Номер патенту: 7935
Опубліковано: 26.12.1995
Автори: Сінігін Віктор Михайлович, Сємєнова Ксенія Олександрівна, Савінов Альберт Павлович, Сєвєрін Гай Ілліч, Афанасенко Микола Іванович, Соколовський Ігор Антонович, Барєр Арнольд Семенович, Козловська Інеса Венедиктівна, Тіхоміров Євгеній Петрович, Грігорьєв Анатолій Іванович
МПК: A61F 5/04
Мітки: лікування, рухової, порушенням, пози, хворих, пристрій, активності
Формула / Реферат:
Устройство для лечения больных с нарушением позы и двигательной активности, содержащее наплечную, тазовую и стопные опоры, связанные между собой фиксирующими элементами, отличающееся тем, что в него введены локтевые, кистевые и коленные опоры, а фиксирующие элементы выполнены в виде эластичных тяг для расположения по передней, боковой и задней поверхностям частей тела пациента, при этом каждая эластичная тяга жестко связана одним концом...
Механізм пересування люкової кришки

Номер патенту: 2738
Опубліковано: 26.12.1994
Автори: Онищенко Анатолій Васильович, Савицький Всеволод Олександрович
МПК: B63B 19/00
Мітки: пересування, кришки, механізм, люкової
Формула / Реферат:
1. Механизм передвижения люковой крышки, содержащий смонтированные на этой крышке катки для перемещения по рельсам комингса люка и привод, имеющий выходной вал, связанный с одним из катков посредством зубчатой передачи, включающей в себя установленную на люковой крышке ведущую шестерню и зацепленную с ней ведомую шестерню, которая расположена соосно с указанным катком и жестко скреплена с ним, отличающийся тем, что, с целью уменьшения...
Попередній патент: Рятувальний дихальний пристрій
Наступний патент: Спосіб одержання бактеріородопсину
Випадковий патент: Еластомерна оболонка ізолятора