Спосіб визначення щонайменше одного параметра стану дугової електропечі, спосіб керування нею і дугова електропіч
Номер патенту: 87068
Опубліковано: 10.06.2009
Автори: Рігер Детлеф, Герхард Детлеф, Зессельманн Райнхард, Фінк Дітер, Мачуллат Томас
Формула / Реферат
1. Спосіб визначення щонайменше одного параметра стану дугової електропечі з щонайменше одним електродом (3, 3а, 3b, 3с), у якому підведення енергії в дугову електропіч виконують, використовуючи вимірювання щонайменше одного електричного сенсорного датчика (13а, 13b, 13с), який відрізняється тим, що на дуговій електропечі вимірюють коливання корпусного шуму, і що щонайменше один параметр стану дугової електропечі визначають за допомогою передавальної функції, яку одержують за рахунок оцінки зміряних коливань корпусного шуму і за рахунок оцінки даних вимірювань щонайменше одного електричного сенсорного датчика (13а, 13b, 13с).
2. Спосіб за п. 1, у якому як параметр стану дугової електропечі визначають висоту пінистого шлаку (15).
3. Спосіб за будь-яким з попередніх пунктів, у якому коливання корпусного шуму на дуговій електропечі вимірюють за допомогою щонайменше одного сенсорного датчика прискорення.
4. Спосіб за будь-яким з попередніх пунктів, у якому вимірюють коливання корпусного шуму, які походять від щонайменше однієї електричної дуги (18) щонайменше одного електрода (3, 3а, 3b, 3с) дугової електропечі.
5. Спосіб за будь-яким з попередніх пунктів, у якому передавальну функцію визначають з сигналу збудження і з вихідного сигналу, у якому сигнал збудження одержують шляхом оцінки даних вимірювань щонайменше одного електричного сенсорного датчика (13а, 13b, 13с) і у якому вихідний сигнал одержують шляхом оцінки зміряних на дуговій електропечі коливань корпусного шуму.
6. Спосіб за п. 5, у якому за допомогою щонайменше одного електричного сенсорного датчика (13а, 13b, 13с) вимірюють сигнал струму, який застосовують для утворення сигналу збудження.
7. Спосіб за п. 6, у якому сигнал збудження утворюють шляхом піднесення до квадрата сигналу струму.
8. Спосіб за будь-яким з попередніх пунктів, у якому за допомогою щонайменше одного електричного сенсорного датчика (13а, 13b, 13с) вимірюють сигнал напруги, який застосовують для утворення сигналу збудження.
9. Спосіб за п. 8, у якому сигнал збудження утворюють за допомогою множення сигналу струму з сигналом напруги.
10. Спосіб за будь-яким з попередніх пунктів, у якому передавальну функцію визначають через взаємний спектр потужності.
11. Спосіб за будь-яким з попередніх пунктів, у якому передавальну функцію оцінюють при щонайменше одній дискретній частоті.
12. Спосіб за п. 11, у якому щонайменше одна дискретна частота є кратною частоті введення енергії в електричну дугу (18).
13. Спосіб за п. 11 або 12, у якому висоту пінистого шлаку (15) визначають залежно від зміни передавальної функції при одній або декількох дискретних частотах.
14. Спосіб керування дуговою електропіччю, у якому щонайменше один параметр стану дугової електропечі визначають згідно із способом за будь-яким із попередніх пунктів формули винаходу і у якому одержують встановлювальні і/або регулювальні сигнали (11) для дугової електропечі за допомогою щонайменше одного визначеного параметра стану.
15. Спосіб за п. 14, у якому встановлювальні і/або регулювальні сигнали (11) подають до подавального пристрою, яким оснащують дугову електропіч.
16. Спосіб за п. 14 або 15, у якому встановлювальні і/або регулювальні сигнали (11) використовують для здійснювання впливу на вдування кисню.
17. Спосіб за будь-яким з пунктів 14-16, у якому встановлювальні і/або регулювальні сигнали (11) використовують для здійснювання впливу на вдування вуглецю.
18. Спосіб за будь-яким з пунктів 14-17, у якому встановлювальні і/або регулювальні сигнали (11) використовують для здійснювання впливу на вдування вапна.
19. Спосіб за будь-яким з пунктів 14-18, у якому встановлювальні і/або регулювальні сигнали (11) використовують для здійснювання впливу на положення щонайменше одного електрода (3, 3а, 3b, 3с).
20. Спосіб за будь-яким з пунктів 14-19, у якому для отримання встановлювальних і/або регулювальних сигналів (11) застосовують нейронну мережу.
21. Дугова електропіч з корпусом печі (1), металоприймачем і з щонайменше одним електродом (3, 3а, 3b, 3с), у якій на кожний електрод (3, 3а, 3b, 3с) передбачено по одному струмопідводу, яка відрізняється тим, що для здійснення способу за будь-яким із попередніх пунктів формули винаходу передбачений щонайменше один електричний сенсорний датчик (13а, 13b, 13с) на струмопідводі і щонайменше один сенсорний датчик корпусного шуму (4, 4а, 4b, 4с) для реєстрації коливань корпусного шуму на стінці (2) металоприймача в печі (1).
22. Дугова електропіч за п. 21, у якій на кожний електрод (3, 3а, 3b, 3с) передбачено по одному електричному сенсорному датчику (13а, 13b, 13с).
23. Дугова електропіч за п. 21 або 22, у якій щонайменше один сенсорний датчик корпусного шуму (4, 4а, 4b, 4с) виконаний у вигляді сенсорного датчика прискорення.
24. Дугова електропіч за будь-яким з пунктів 21-23, у якій на кожний електрод (3, 3а, 3b, 3с) передбачений один сенсорний датчик корпусного шуму (4, 4а, 4b, 4с).
25. Дугова електропіч за п. 24, у якій один або декілька сенсорних датчиків корпусного шуму (4, 4а, 4b, 4с) розташовано на протилежній відповідному електроду (3, 3а, 3b, 3с) стінці (2) металоприймача в печі (1).
26. Дугова електропіч за будь-яким з пунктів 21-25, у якій щонайменше один електричний сенсорний датчик (13а, 13b, 13с) і щонайменше один сенсорний датчик корпусного шуму (4, 4а, 4b, 4с) зв'язані з пристроєм обробки сигналів (8).
27. Дугова електропіч за будь-яким з пунктів 21-26, у якій для зв'язку щонайменше одного сенсорного датчика корпусного шуму (4, 4а, 4b, 4с) з пристроєм обробки сигналів (8) передбачений щонайменше один світловод (7).
28. Дугова електропіч за п. 27, у якій щонайменше один сенсорний датчик корпусного шуму (4, 4а, 4b, 4с) зв'язаний з світловодом (7) через принаймні одну сигнальну лінію (5, 5а, 5b, 5с) і через розташований перед світловодом (7) оптичний пристрій (6).
29. Дугова електропіч за п. 28, у якій щонайменше одна сигнальна лінія (5, 5а, 5b, 5с) виконана прокладеною захищено.
30. Дугова електропіч за будь-яким з пунктів 26-29, у якій пристрій обробки сигналів (8) зв'язаний з пристроєм регулювання (9) для дугової електропечі.
Текст
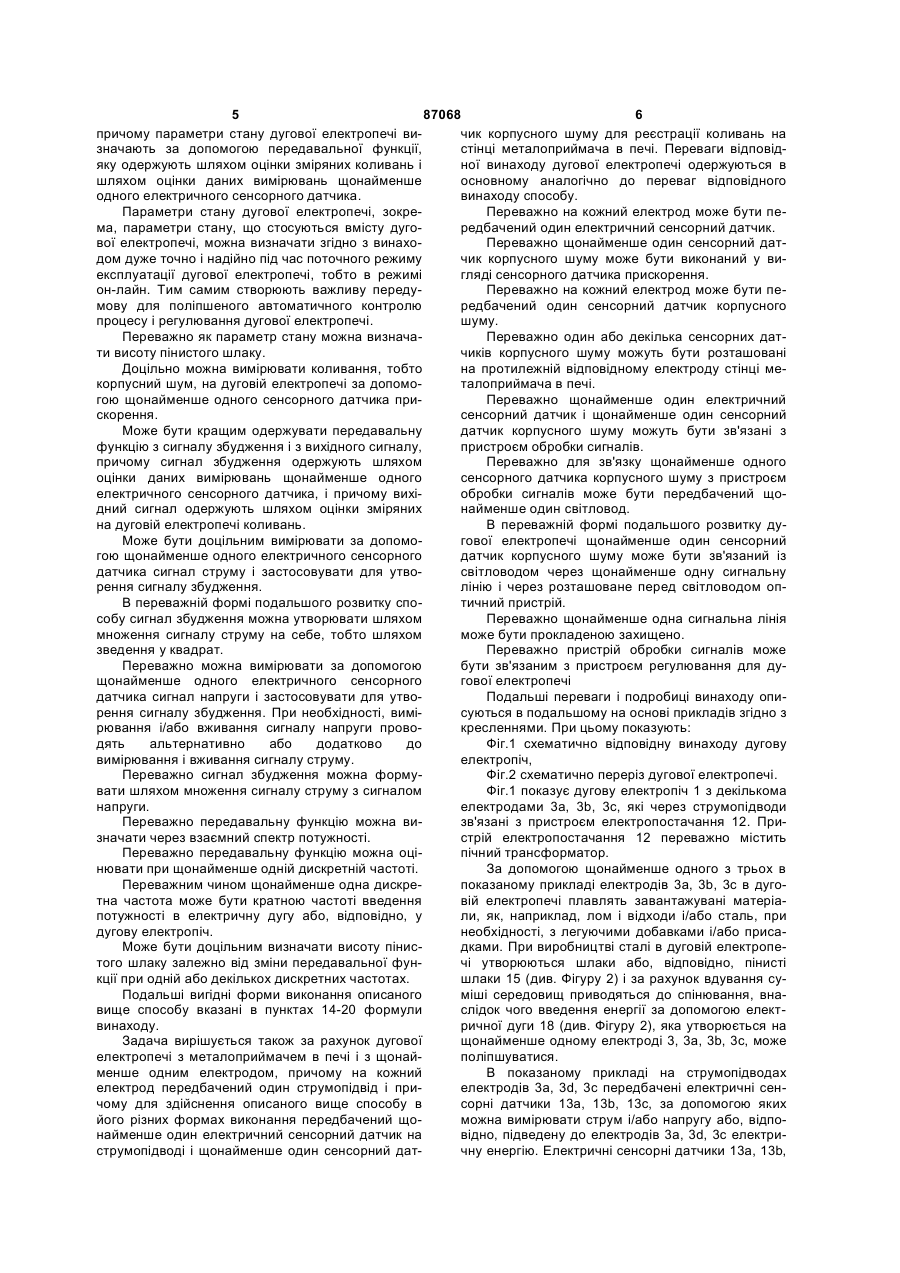
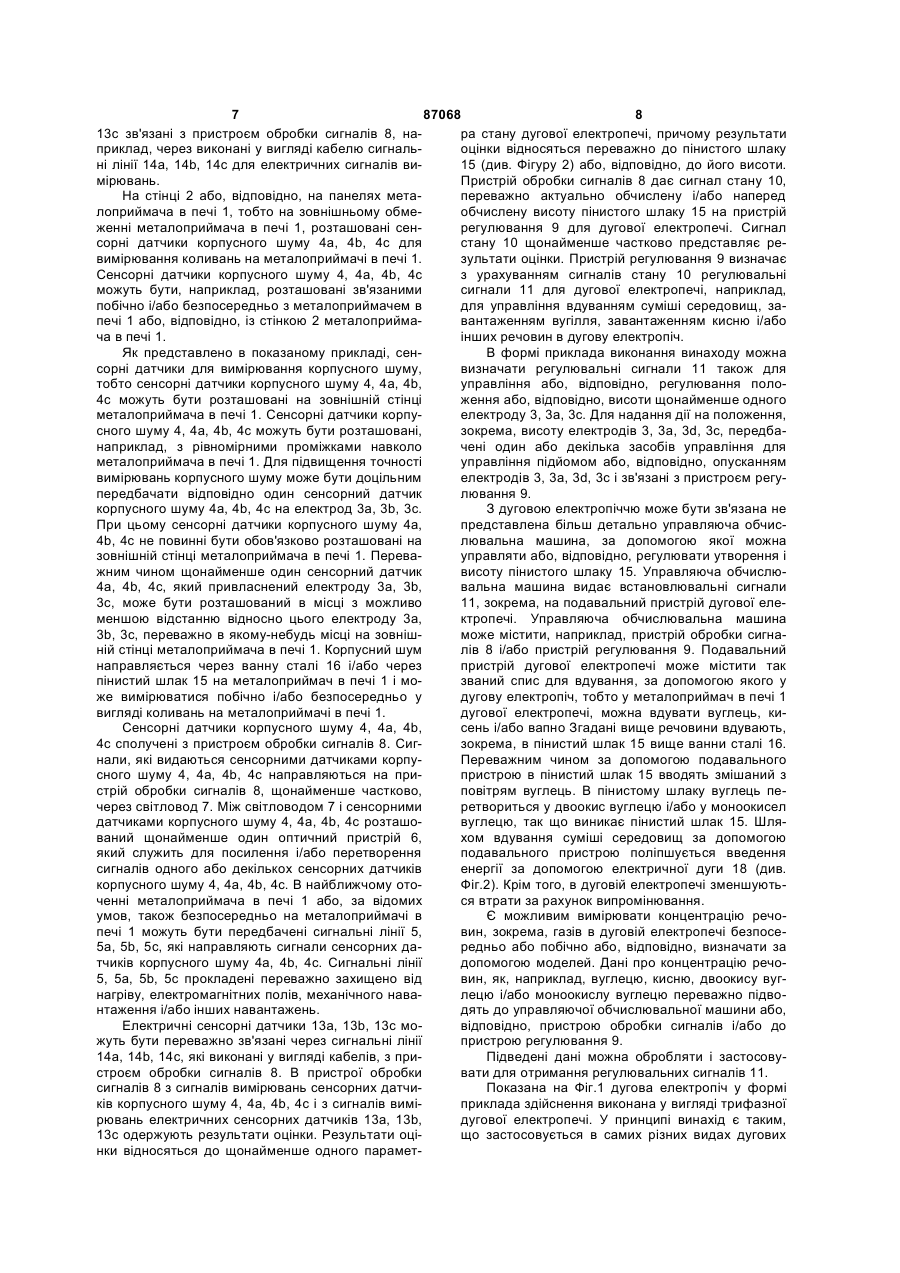
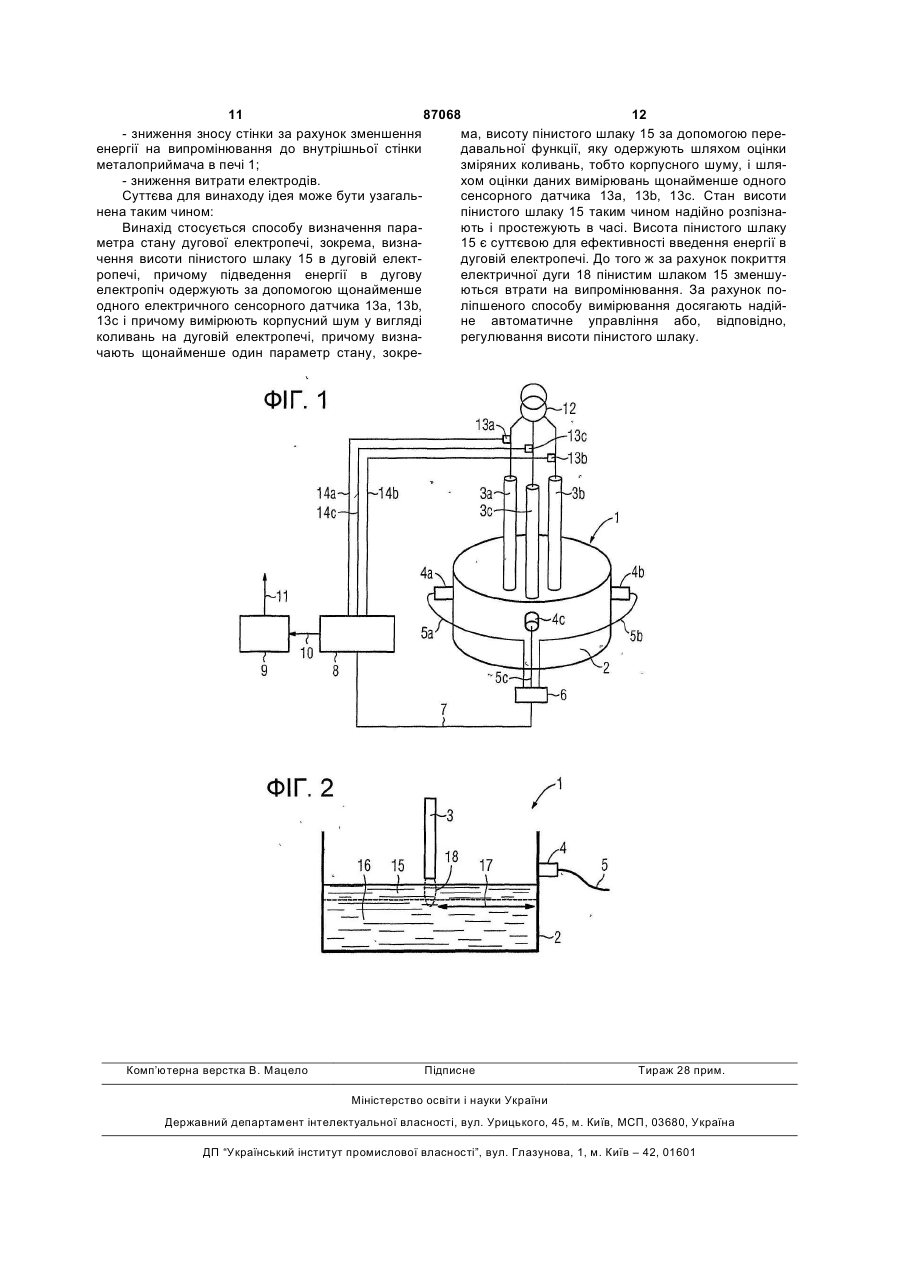
1. Спосіб визначення щонайменше одного параметра стану дугової електропечі з щонайменше одним електродом (3, 3а, 3b, 3с), у якому підведення енергії в дугову електропіч виконують, використовуючи вимірювання щонайменше одного електричного сенсорного датчика (13а, 13b, 13с), який відрізняється тим, що на дуговій електропечі вимірюють коливання корпусного шуму, і що щонайменше один параметр стану дугової електропечі визначають за допомогою передавальної функції, яку одержують за рахунок оцінки зміряних коливань корпусного шуму і за рахунок оцінки даних вимірювань щонайменше одного електричного сенсорного датчика (13а, 13b, 13с). 2. Спосіб за п. 1, у якому як параметр стану дугової електропечі визначають висоту пінистого шлаку (15). 3. Спосіб за будь-яким з попередніх пунктів, у якому коливання корпусного шуму на дуговій електропечі вимірюють за допомогою щонайменше одного сенсорного датчика прискорення. 4. Спосіб за будь-яким з попередніх пунктів, у якому вимірюють коливання корпусного шуму, які походять від щонайменше однієї електричної дуги 2 (19) 1 3 87068 4 допомогою щонайменше одного визначеного па23. Дугова електропіч за п. 21 або 22, у якій щораметра стану. найменше один сенсорний датчик корпусного шу15. Спосіб за п. 14, у якому встановлювальні і/або му (4, 4а, 4b, 4с) виконаний у вигляді сенсорного регулювальні сигнали (11) подають до подавальдатчика прискорення. ного пристрою, яким оснащують дугову електропіч. 24. Дугова електропіч за будь-яким з пунктів 21-23, 16. Спосіб за п. 14 або 15, у якому встановлювау якій на кожний електрод (3, 3а, 3b, 3с) передбальні і/або регулювальні сигнали (11) використовучений один сенсорний датчик корпусного шуму (4, ють для здійснювання впливу на вдування кисню. 4а, 4b, 4с). 17. Спосіб за будь-яким з пунктів 14-16, у якому 25. Дугова електропіч за п. 24, у якій один або девстановлювальні і/або регулювальні сигнали (11) кілька сенсорних датчиків корпусного шуму (4, 4а, використовують для здійснювання впливу на вду4b, 4с) розташовано на протилежній відповідному вання вуглецю. електроду (3, 3а, 3b, 3с) стінці (2) металоприймача 18. Спосіб за будь-яким з пунктів 14-17, у якому в печі (1). встановлювальні і/або регулювальні сигнали (11) 26. Дугова електропіч за будь-яким з пунктів 21-25, використовують для здійснювання впливу на вдуу якій щонайменше один електричний сенсорний вання вапна. датчик (13а, 13b, 13с) і щонайменше один сенсор19. Спосіб за будь-яким з пунктів 14-18, у якому ний датчик корпусного шуму (4, 4а, 4b, 4с) зв'язані встановлювальні і/або регулювальні сигнали (11) з пристроєм обробки сигналів (8). використовують для здійснювання впливу на по27. Дугова електропіч за будь-яким з пунктів 21-26, ложення щонайменше одного електрода (3, 3а, 3b, у якій для зв'язку щонайменше одного сенсорного 3с). датчика корпусного шуму (4, 4а, 4b, 4с) з пристро20. Спосіб за будь-яким з пунктів 14-19, у якому єм обробки сигналів (8) передбачений щонаймендля отримання встановлювальних і/або регулюваше один світловод (7). льних сигналів (11) застосовують нейронну мере28. Дугова електропіч за п. 27, у якій щонайменше жу. один сенсорний датчик корпусного шуму (4, 4а, 4b, 21. Дугова електропіч з корпусом печі (1), метало4с) зв'язаний з світловодом (7) через принаймні приймачем і з щонайменше одним електродом (3, одну сигнальну лінію (5, 5а, 5b, 5с) і через розта3а, 3b, 3с), у якій на кожний електрод (3, 3а, 3b, 3с) шований перед світловодом (7) оптичний пристрій передбачено по одному струмопідводу, яка відрі(6). зняється тим, що для здійснення способу за будь29. Дугова електропіч за п. 28, у якій щонайменше яким із попередніх пунктів формули винаходу пеодна сигнальна лінія (5, 5а, 5b, 5с) виконана проредбачений щонайменше один електричний сенкладеною захищено. сорний датчик (13а, 13b, 13с) на струмопідводі і 30. Дугова електропіч за будь-яким з пунктів 26-29, щонайменше один сенсорний датчик корпусного у якій пристрій обробки сигналів (8) зв'язаний з шуму (4, 4а, 4b, 4с) для реєстрації коливань корпупристроєм регулювання (9) для дугової електросного шуму на стінці (2) металоприймача в печі (1). печі. 22. Дугова електропіч за п. 21, у якій на кожний електрод (3, 3а, 3b, 3с) передбачено по одному електричному сенсорному датчику (13а, 13b, 13с). Винахід стосується способу визначення щонайменше одного параметра стану дугової електропечі з щонайменше одним електродом, причому підведення енергії у дугову електропіч визначають за допомогою щонайменше одного електричного сенсорного датчика. Винахід стосується також дугової електропечі з металоприймачем в печі і з щонайменше одним електродом, причому на кожний електрод передбачений один струмопідвід. З DE 197 48310 С1 відоме передбачення в дуговій електропечі пінисті шлаки на основі завантажуваних матеріалів дугової електропечі, як лом і відходи, сталь, легуючі добавки або присадки, у комбінації з підведенням енергії. Проте виявилося, що параметри стану дугової електропечі таким чином не можуть бути визначені достатньо надійно і достатньо точно. Європейська патентна заявка ЕР 0 637 638 А1 розкриває спосіб для отримання металевого розплаву в дуговій електропечі. Тут як параметр стану дугової електропечі вимірюють висоту шару пінистого шлаку і, при необхідності, залучають для ре гулювання висоти шару пінистого шлаку. Для вимірювання рівня пінистого шлаку розкриті звукові випромінювання, які походять з дугової електропечі і які у вигляді зміряного звукового рівня застосовують для управління висотою шару пінистого шлаку. Далі розкрито, що для вимірювання рівня можна залучати електричні робочі параметри: напругу і силу струму дугової електропечі. З опису до викладеної заявки на патент ЕР 0 661 910 А1 відомі спосіб для регулювання електродів дугової електропечі постійного струму і пристрій регулювання електродів. При цьому подачу енергії в дугову електропіч визначають за допомогою щонайменше одного електричного сенсорного датчика. Далі документ D2 розкриває, що рівень шлаку в дуговій електропечі є параметром стану. Задачею даного винаходу є створення можливості поліпшеного визначення параметрів стану дугової електропечі. Ця задача вирішується за рахунок способу названого в обмежувальній частині виду, причому вимірюють коливання на дуговій електропечі, і 5 87068 6 причому параметри стану дугової електропечі вичик корпусного шуму для реєстрації коливань на значають за допомогою передавальної функції, стінці металоприймача в печі. Переваги відповідяку одержують шляхом оцінки зміряних коливань і ної винаходу дугової електропечі одержуються в шляхом оцінки даних вимірювань щонайменше основному аналогічно до переваг відповідного одного електричного сенсорного датчика. винаходу способу. Параметри стану дугової електропечі, зокреПереважно на кожний електрод може бути пема, параметри стану, що стосуються вмісту дугоредбачений один електричний сенсорний датчик. вої електропечі, можна визначати згідно з винахоПереважно щонайменше один сенсорний датдом дуже точно і надійно під час поточного режиму чик корпусного шуму може бути виконаний у виексплуатації дугової електропечі, тобто в режимі гляді сенсорного датчика прискорення. он-лайн. Тим самим створюють важливу передуПереважно на кожний електрод може бути пемову для поліпшеного автоматичного контролю редбачений один сенсорний датчик корпусного процесу і регулювання дугової електропечі. шуму. Переважно як параметр стану можна визначаПереважно один або декілька сенсорних датти висоту пінистого шлаку. чиків корпусного шуму можуть бути розташовані Доцільно можна вимірювати коливання, тобто на протилежній відповідному електроду стінці мекорпусний шум, на дуговій електропечі за допомоталоприймача в печі. гою щонайменше одного сенсорного датчика приПереважно щонайменше один електричний скорення. сенсорний датчик і щонайменше один сенсорний Може бути кращим одержувати передавальну датчик корпусного шуму можуть бути зв'язані з функцію з сигналу збудження і з вихідного сигналу, пристроєм обробки сигналів. причому сигнал збудження одержують шляхом Переважно для зв'язку щонайменше одного оцінки даних вимірювань щонайменше одного сенсорного датчика корпусного шуму з пристроєм електричного сенсорного датчика, і причому вихіобробки сигналів може бути передбачений щодний сигнал одержують шляхом оцінки зміряних найменше один світловод. на дуговій електропечі коливань. В переважній формі подальшого розвитку дуМоже бути доцільним вимірювати за допомогової електропечі щонайменше один сенсорний гою щонайменше одного електричного сенсорного датчик корпусного шуму може бути зв'язаний із датчика сигнал струму і застосовувати для утвосвітловодом через щонайменше одну сигнальну рення сигналу збудження. лінію і через розташоване перед світловодом опВ переважній формі подальшого розвитку спотичний пристрій. собу сигнал збудження можна утворювати шляхом Переважно щонайменше одна сигнальна лінія множення сигналу струму на себе, тобто шляхом може бути прокладеною захищено. зведення у квадрат. Переважно пристрій обробки сигналів може Переважно можна вимірювати за допомогою бути зв'язаним з пристроєм регулювання для дущонайменше одного електричного сенсорного гової електропечі датчика сигнал напруги і застосовувати для утвоПодальші переваги і подробиці винаходу опирення сигналу збудження. При необхідності, вимісуються в подальшому на основі прикладів згідно з рювання і/або вживання сигналу напруги провокресленнями. При цьому показують: дять альтернативно або додатково до Фіг.1 схематично відповідну винаходу дугову вимірювання і вживання сигналу струму. електропіч, Переважно сигнал збудження можна формуФіг.2 схематично переріз дугової електропечі. вати шляхом множення сигналу струму з сигналом Фіг.1 показує дугову електропіч 1 з декількома напруги. електродами 3а, 3b, 3с, які через струмопідводи Переважно передавальну функцію можна визв'язані з пристроєм електропостачання 12. Призначати через взаємний спектр потужності. стрій електропостачання 12 переважно містить Переважно передавальну функцію можна оціпічний трансформатор. нювати при щонайменше одній дискретній частоті. За допомогою щонайменше одного з трьох в Переважним чином щонайменше одна дискрепоказаному прикладі електродів 3а, 3b, 3с в дуготна частота може бути кратною частоті введення вій електропечі плавлять завантажувані матеріапотужності в електричну дугу або, відповідно, у ли, як, наприклад, лом і відходи і/або сталь, при дугову електропіч. необхідності, з легуючими добавками і/або присаМоже бути доцільним визначати висоту пінисдками. При виробництві сталі в дуговій електропетого шлаку залежно від зміни передавальної фунчі утворюються шлаки або, відповідно, пінисті кції при одній або декількох дискретних частотах. шлаки 15 (див. Фігуру 2) і за рахунок вдування суПодальші вигідні форми виконання описаного міші середовищ приводяться до спінювання, внавище способу вказані в пунктах 14-20 формули слідок чого введення енергії за допомогою електвинаходу. ричної дуги 18 (див. Фігуру 2), яка утворюється на Задача вирішується також за рахунок дугової щонайменше одному електроді 3, 3а, 3b, 3с, може електропечі з металоприймачем в печі і з щонайполіпшуватися. менше одним електродом, причому на кожний В показаному прикладі на струмопідводах електрод передбачений один струмопідвід і приелектродів 3а, 3d, 3с передбачені електричні сенчому для здійснення описаного вище способу в сорні датчики 13а, 13b, 13с, за допомогою яких його різних формах виконання передбачений щоможна вимірювати струм і/або напругу або, відпонайменше один електричний сенсорний датчик на відно, підведену до електродів 3а, 3d, 3с електриструмопідводі і щонайменше один сенсорний датчну енергію. Електричні сенсорні датчики 13а, 13b, 7 87068 8 13с зв'язані з пристроєм обробки сигналів 8, нара стану дугової електропечі, причому результати приклад, через виконані у вигляді кабелю сигнальоцінки відносяться переважно до пінистого шлаку ні лінії 14а, 14b, 14с для електричних сигналів ви15 (див. Фігуру 2) або, відповідно, до його висоти. мірювань. Пристрій обробки сигналів 8 дає сигнал стану 10, На стінці 2 або, відповідно, на панелях метапереважно актуально обчислену і/або наперед лоприймача в печі 1, тобто на зовнішньому обмеобчислену висоту пінистого шлаку 15 на пристрій женні металоприймача в печі 1, розташовані сенрегулювання 9 для дугової електропечі. Сигнал сорні датчики корпусного шуму 4а, 4b, 4с для стану 10 щонайменше частково представляє ревимірювання коливань на металоприймачі в печі 1. зультати оцінки. Пристрій регулювання 9 визначає Сенсорні датчики корпусного шуму 4, 4а, 4b, 4с з урахуванням сигналів стану 10 регулювальні можуть бути, наприклад, розташовані зв'язаними сигнали 11 для дугової електропечі, наприклад, побічно і/або безпосередньо з металоприймачем в для управління вдуванням суміші середовищ, запечі 1 або, відповідно, із стінкою 2 металоприймавантаженням вугілля, завантаженням кисню і/або ча в печі 1. інших речовин в дугову електропіч. Як представлено в показаному прикладі, сенВ формі приклада виконання винаходу можна сорні датчики для вимірювання корпусного шуму, визначати регулювальні сигнали 11 також для тобто сенсорні датчики корпусного шуму 4, 4а, 4b, управління або, відповідно, регулювання поло4с можуть бути розташовані на зовнішній стінці ження або, відповідно, висоти щонайменше одного металоприймача в печі 1. Сенсорні датчики корпуелектроду 3, 3а, 3с. Для надання дії на положення, сного шуму 4, 4а, 4b, 4с можуть бути розташовані, зокрема, висоту електродів 3, 3а, 3d, 3с, передбанаприклад, з рівномірними проміжками навколо чені один або декілька засобів управління для металоприймача в печі 1. Для підвищення точності управління підйомом або, відповідно, опусканням вимірювань корпусного шуму може бути доцільним електродів 3, 3а, 3d, 3с і зв'язані з пристроєм регупередбачати відповідно один сенсорний датчик лювання 9. корпусного шуму 4а, 4b, 4с на електрод 3а, 3b, 3с. З дуговою електропіччю може бути зв'язана не При цьому сенсорні датчики корпусного шуму 4а, представлена більш детально управляюча обчис4b, 4с не повинні бути обов'язково розташовані на лювальна машина, за допомогою якої можна зовнішній стінці металоприймача в печі 1. Перевауправляти або, відповідно, регулювати утворення і жним чином щонайменше один сенсорний датчик висоту пінистого шлаку 15. Управляюча обчислю4а, 4b, 4с, який привласнений електроду 3а, 3b, вальна машина видає встановлювальні сигнали 3с, може бути розташований в місці з можливо 11, зокрема, на подавальний пристрій дугової елеменшою відстанню відносно цього електроду 3а, ктропечі. Управляюча обчислювальна машина 3b, 3с, переважно в якому-небудь місці на зовнішможе містити, наприклад, пристрій обробки сигнаній стінці металоприймача в печі 1. Корпусний шум лів 8 і/або пристрій регулювання 9. Подавальний направляється через ванну сталі 16 і/або через пристрій дугової електропечі може містити так пінистий шлак 15 на металоприймач в печі 1 і мозваний спис для вдування, за допомогою якого у же вимірюватися побічно і/або безпосередньо у дугову електропіч, тобто у металоприймач в печі 1 вигляді коливань на металоприймачі в печі 1. дугової електропечі, можна вдувати вуглець, киСенсорні датчики корпусного шуму 4, 4а, 4b, сень і/або вапно Згадані вище речовини вдувають, 4с сполучені з пристроєм обробки сигналів 8. Сигзокрема, в пінистий шлак 15 вище ванни сталі 16. нали, які видаються сенсорними датчиками корпуПереважним чином за допомогою подавального сного шуму 4, 4а, 4b, 4с направляються на припристрою в пінистий шлак 15 вводять змішаний з стрій обробки сигналів 8, щонайменше частково, повітрям вуглець. В пінистому шлаку вуглець печерез світловод 7. Між світловодом 7 і сенсорними ретвориться у двоокис вуглецю і/або у моноокисел датчиками корпусного шуму 4, 4а, 4b, 4с розташовуглецю, так що виникає пінистий шлак 15. Шляваний щонайменше один оптичний пристрій 6, хом вдування суміші середовищ за допомогою який служить для посилення і/або перетворення подавального пристрою поліпшується введення сигналів одного або декількох сенсорних датчиків енергії за допомогою електричної дуги 18 (див. корпусного шуму 4, 4а, 4b, 4с. В найближчому отоФіг.2). Крім того, в дуговій електропечі зменшуютьченні металоприймача в печі 1 або, за відомих ся втрати за рахунок випромінювання. умов, також безпосередньо на металоприймачі в Є можливим вимірювати концентрацію речопечі 1 можуть бути передбачені сигнальні лінії 5, вин, зокрема, газів в дуговій електропечі безпосе5а, 5b, 5с, які направляють сигнали сенсорних даредньо або побічно або, відповідно, визначати за тчиків корпусного шуму 4а, 4b, 4с. Сигнальні лінії допомогою моделей. Дані про концентрацію речо5, 5а, 5b, 5c прокладені переважно захищено від вин, як, наприклад, вуглецю, кисню, двоокису вугнагріву, електромагнітних полів, механічного навалецю і/або моноокислу вуглецю переважно підвонтаження і/або інших навантажень. дять до управляючої обчислювальної машини або, Електричні сенсорні датчики 13а, 13b, 13с мовідповідно, пристрою обробки сигналів і/або до жуть бути переважно зв'язані через сигнальні лінії пристрою регулювання 9. 14а, 14b, 14с, які виконані у вигляді кабелів, з приПідведені дані можна обробляти і застосовустроєм обробки сигналів 8. В пристрої обробки вати для отримання регулювальних сигналів 11. сигналів 8 з сигналів вимірювань сенсорних датчиПоказана на Фіг.1 дугова електропіч у формі ків корпусного шуму 4, 4а, 4b, 4с і з сигналів виміприклада здійснення виконана у вигляді трифазної рювань електричних сенсорних датчиків 13а, 13b, дугової електропечі. У принципі винахід є таким, 13с одержують результати оцінки. Результати оціщо застосовується в самих різних видах дугових нки відносяться до щонайменше одного парамет 9 87068 10 печей, наприклад, також в печах постійного струнапруги. Вихідні сигнали утворюють сигнали корму. пусного шуму. При цьому для сигналів в тимчасоФігура 2 показує у спрощеному вигляді електвій області справедливо: род 3, 3а, 3d, 3с з електричною дугою 18 в дуговій Y(t)=h(t)×X(t) (I) електропечі. На стінці 2 металоприймача в печі 1 причому Y(t) означає сигнал корпусного шуму, дугової електропечі розташований сенсорний датX(t) - введення енергії в електричній дузі 18 і h(t) чик корпусного шуму 4, 4а, 4b, 4с, який сполучений реакція на одиничний імпульс. Величини h(t) і X(t) з сигнальною лінією 5, 5а, 5b, 5с, за допомогою зв'язані між собою за допомогою оператора згортякої можна направляти сигнали вимірювань на ки. пристрій обробки сигналів 8 (див. Фігуру 1). СхеПередавальну функцію H (w) одержують в діаматично в металоприймачі в печі 1 представлені пазоні частот: ванна сталі 16 і пінистий шлак 15. y Висоту пінистого шлаку 15 можна визначати в (w)=Η(w)× x (w) (II) пристрої обробки сигналів 8 за допомогою перепричому x (w) або, відповідно, y (w) є передавальної функції корпусного шуму в дуговій електропечі. Передавальна функція характеризує схетвореними за Фур'є сигналами збудження і вихідматично показаний на Фігурі 2 шлях передачі ними сигналами. корпусного шуму від збудження до детекції. Величини x (w), y (w) і Н(w) є комплексними. Збудження корпусного шуму відбувається за Для уникнення комплексного розподілу Η(w) обчирахунок введення потужності на електродах 3, 3а, слюють через взаємний спектр потужності: 3d, 3с в електричній дузі 18. Корпусний шум, тобто ½H(w)½=½W xy(w)½/W xx(w), (III) викликані збудженням коливання, передаються причому W xx(w) означає взаємний спектр почерез ванну рідкої сталі 16 і/або через пінистий тужності і W xx - спектр потужності на вході, тобто шлак 15, щонайменше частково покриваючий ванна стороні збудження. ну сталі 16, на стінку 2 дугової електропечі. ПереПередавальну функцію Н(w) визначають тільдача корпусного шуму може відбуватися додаткоки при дискретних частотах, причому дискретні во, щонайменше частково, також через ще не частоти є (гармонійними) кратними основної часрозплавлений завантажувальний матеріал в дугототи постачання потужністю електродів 3, 3а, 3b, вій електропечі. Детекція корпусного шуму відбу3с, оскільки збудження відбувається тільки через вається через сенсорні датчики корпусного шуму основну гармоніку і вищі гармоніки приєднаної 4, 4а, 4b, 4с, які розташовані на стінці 2 металопотужності. При працюючому, наприклад, з частоприймача в печі 1 дугової електропечі. Сенсорні тою 50 Гц пристрої електропостачання 12 для дудатчики корпусного шуму 4, 4а, 4b, 4с сприймають гової електропечі дискретні частоти є кратними коливання на стінках 2 металоприймача в печі 1. 100 Гц. Сенсорні датчики корпусного шуму 4, 4а, 4b, 4с Передавальна функція Η(w) характеризує севиконані переважним чином у вигляді сенсорних редовище в дуговій електропечі. Тому тимчасову датчиків прискорення. Сенсорні датчики корпуснозміну середовища, наприклад, висоту пінистого го шуму 4, 4а, 4b, 4с переважним чином розміщені шлаку 15 можна визначати за рахунок зміни перевище за зону пінистого шлаку. Переважним чином давальної функції. Через демпфування або, відпосенсорні датчики корпусного шуму 4, 4а, 4b, 4с відно, посилення значень передавальної функції розташовані на протилежних сторонах електродів можна обчислювати результуюче значення, яке 3, 3а, 3d, 3с на стінці 2 дугової електропечі. корелює з висотою пінистого шлаку 15. Це було Електричні сенсорні датчики 13а, 13b, 13с репідтверджено при пробних вимірюваннях з часоєструють сигнали струму і/або напруги електродів вою роздільною здатністю порядку від 1 до 2 се3, 3а, 3b, 3с. Сигнали струму і/або напруги реєсткунд. рують переважним чином з роздільною здатністю Оцінку в пристрої обробки сигналів 8 можна за часом. Сигнали сенсорних датчиків корпусного узгоджувати за допомогою емпіричних значень з шуму направляють по захищених лініях 5, 5а, 5b, експлуатації дугової електропечі. Реєстрація, оцін5с в оптичний пристрій 6 (див. Фігуру 1). Оптичний ка сигналів і визначення шлаку відбувається в репристрій 6 розташований переважним чином поріжимі он-лайн при експлуатації, так що сигнал ставняно близько до самої дугової електропечі. Оптину, який характеризує висоту шлаку в дуговій чний пристрій 6 служить для посилення і перетвоелектропечі, можна застосовувати для автоматичрення сигналів сенсорних датчиків корпусного ного регулювання процесу. За рахунок поліпшеношуму 4, 4а, 4b, 4с. В оптичному пристрої 6 ці сигго згідно з винаходом відносно техніки вимірювань нали перетворюють в оптичні сигнали і направлязнання процесу утворення пінистого шлаку стає ють без перешкод через світловод 7 на порівняно можливим поліпшений контроль і регулювання великі відстані, наприклад, 50 до 200 м, у пристрій процесу, який приводить до таких переваг: обробки сигналів 8. - підвищення продуктивності за рахунок більш У пристрої обробки сигналів 8 сигнали реєствисокої питомої потужності печі за рахунок зменрують і оцінюють. У пристрої обробки сигналів 8 шення обумовлених, зокрема, ремонтами печі часигнали перетворюють у цифрову форму перевасів простою; жним чином з достатньо високою частотою дис- зниження питомої енергії на плавлення при кретизації, наприклад, 6000 виборок/секунду. Сигпостійній температурі металу при випуску; нали збудження електродів 3, 3а, 3b, 3с утворюють переважним чином шляхом множення відповідних сигналів струму і відповідних сигналів 11 87068 12 - зниження зносу стінки за рахунок зменшення ма, висоту пінистого шлаку 15 за допомогою переенергії на випромінювання до внутрішньої стінки давальної функції, яку одержують шляхом оцінки металоприймача в печі 1; зміряних коливань, тобто корпусного шуму, і шля- зниження витрати електродів. хом оцінки даних вимірювань щонайменше одного Суттєва для винаходу ідея може бути узагальсенсорного датчика 13а, 13b, 13с. Стан висоти нена таким чином: пінистого шлаку 15 таким чином надійно розпізнаВинахід стосується способу визначення парають і простежують в часі. Висота пінистого шлаку метра стану дугової електропечі, зокрема, визна15 є суттєвою для ефективності введення енергії в чення висоти пінистого шлаку 15 в дуговій електдуговій електропечі. До того ж за рахунок покриття ропечі, причому підведення енергії в дугову електричної дуги 18 пінистим шлаком 15 зменшуелектропіч одержують за допомогою щонайменше ються втрати на випромінювання. За рахунок поодного електричного сенсорного датчика 13а, 13b, ліпшеного способу вимірювання досягають надій13с і причому вимірюють корпусний шум у вигляді не автоматичне управління або, відповідно, коливань на дуговій електропечі, причому визнарегулювання висоти пінистого шлаку. чають щонайменше один параметр стану, зокре Комп’ютерна верстка В. Мацело Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination at least one parameter of state of arc electric furnace, method for its control and arc electric furnace
Автори англійськоюRieger Detlef, Fink Dieter, Gerhard Detlef, Matschullat Thomas, Sesselman Reinhard
Назва патенту російськоюСпособ определения по меньшей мере одного параметра состояния дуговой электропечи, способ управления ею и дуговая электропечь
Автори російськоюРигер Детлеф, Финк Дитер, Герхард Детлеф, Мачуллат Томас, Зессельманн Райнхард
МПК / Мітки
МПК: C21C 5/52, F27B 3/28, F27D 19/00
Мітки: визначення, спосіб, одного, параметра, керування, електропечі, електропіч, щонайменше, стану, дугової, нею, дугова
Код посилання
<a href="https://ua.patents.su/6-87068-sposib-viznachennya-shhonajjmenshe-odnogo-parametra-stanu-dugovo-elektropechi-sposib-keruvannya-neyu-i-dugova-elektropich.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення щонайменше одного параметра стану дугової електропечі, спосіб керування нею і дугова електропіч</a>
Спосіб видалення відхідних газів з дугової електропечі та дугова електропіч
Номер патенту: 27037
Опубліковано: 28.02.2000
Автори: ПЕРНЕ Даніель, БЛЮМ Жак
МПК: C21C 5/00, F27D 17/00, F27D 3/08
Мітки: відхідних, електропечі, газів, дугова, видалення, дугової, електропіч, спосіб
Формула / Реферат:
1. Способ удаления отходящих газов из дуговой электропечи, включающий поступление газов из печи во всасывающую часть средства откачки, соединенную со сводом печи, поддерживание давления газа во всасывающей части средства откачки постоянным, независимо от количества газа, выделяемого из печи, отличающийся тем, что для поддержания давления газа во всасывающей части средства откачки постоянным в зону, сообщающуюся с всасывающей частью средства...
Спосіб і пристрій для регулювання щонайменше одного робочого параметра рабочих органів зернозбирального комбайна
Номер патенту: 84269
Опубліковано: 10.10.2008
Автори: Баумгартен Йоахім, Фітцнер Вернер, Бенке Віллі
МПК: A01D 41/127
Мітки: комбайна, рабочих, параметра, робочого, щонайменше, спосіб, органів, пристрій, зернозбирального, одного, регулювання
Формула / Реферат:
1. Спосіб регулювання щонайменше одного робочого параметра робочих органів зернозбирального комбайна, причому робочі органи комбайна утворені молотильними органами, а також розташованими за ними сепараційними органами і щонайменше одним зерноочисним пристроєм, що включає зерноочисні органи, а зерноочисний пристрій функціонально з'єднаний за допомогою щонайменше одного зворотного пристрою з молотильними органами, який відрізняється тим, що до...
Пристрій для керування електричним режимом дугової електропечі
Номер патенту: 34774
Опубліковано: 26.08.2008
Автори: Афанасьєва Анастасія Володимирівна, Панкратов Анатолій Іванович
МПК: H05B 7/00
Мітки: електропечі, режимом, керування, електричним, пристрій, дугової
Формула / Реферат:
Пристрій для керування електричним режимом дугової електропечі, що містить для кожної фази датчик напруги, вихід якого сполучений з входом компаратора і керуючим входом першого ключа керування, датчик струму, вихід якого сполучений з першим входом регулятора, другий вхід якого сполучений з виходом першого ключа, а вихід сполучений з першим входом гідроприводу, другий вхід якого сполучений з виходом другого ключа керування, а його вихід...
Система електропостачання дугової електропечі постійного струму
Номер патенту: 27758
Опубліковано: 12.11.2007
Автори: Кшижак Станіслав Владиславо, Гудим Василь Ількович, Стасьо Роман Іванович
МПК: H05B 3/22
Мітки: постійного, електропечі, дугової, система, електропостачання, струму
Формула / Реферат:
Система електропостачання дугової електропечі постійного струму, що містить трифазну систему напруг, однофазні некеровані випрямлячі змінного струму у постійний, до виводів яких приєднані електроди дугової електропечі через струмопроводи короткої мережі, яка відрізняється тим, що додатково містить трифазний пічний трансформатор, блок задання режимів, блок керування, шість однофазних струмообмежуючих реакторів, які приєднані до виходів...
Пристрій для підведення струму до дугової електропечі
Номер патенту: 37515
Опубліковано: 15.05.2001
Автори: Коротя Олександр Сільвестрович, Петров Борис Федорович, Підгорний Володимир Іванович, Годецький Євген Васильович
МПК: H05B 7/11
Мітки: електропечі, дугової, пристрій, підведення, струму
Формула / Реферат:
Пристрій для підведення струму до дугової електропечі, який складається з електрода, хомута, який охоплює електрод і щоки з пневмопружинним затисскачем, який відрізняється тим, що уздовж електрода виконана площина, яка направлена до щоки контактною поверхнею плоскої форми, при цьому площа контактної поверхні “електрод-щока” повинна бути не менша за площу поперечного перерізу електрода.
Попередній патент: Пристрій для просочення гнучкого виробу трубчастої форми
Наступний патент: Спосіб обробки рослин сільськогосподарських культур
Випадковий патент: Імпульсний редуктор