Спосіб визначення жорсткості опорного контуру тонких тіл
Номер патенту: 87446
Опубліковано: 10.02.2014
Автори: Пацюк Анатолій Григорович, Гук Наталія Анатоліївна, Ободан Наталія Іллівна, Полішко Олексій Миколайович
Формула / Реферат
Спосіб визначення жорсткості опорного контуру тонких тіл, у якому за отриманими даними значень деформацій визначають жорсткість опорного контуру тонких тіл, який відрізняється тим, що використовують експлуатаційне навантаження для визначення відгуку виробу на це навантаження, як відгук тонкостінної системи виступають значення деформацій зовнішньої і внутрішньої поверхонь тонкостінної системи, які вимірюють в заданих точках поверхні виробу, відповідні обчислені значення деформацій визначають за допомогою методу скінченних елементів з використанням математичної моделі конструкції при відомих умовах закріплення, опис умов закріплення опорного контуру тонкостінної конструкції, яка знаходиться під дією навантаження, здійснюють шляхом введення коефіцієнтів пружності опор, які обмежують значення вигинних та тангенційних переміщень, при цьому значення коефіцієнтів пружності опор є параметрами та ідентифікують за допомогою алгоритму мінімізації функціоналу, який характеризує середньоквадратичне відхилення обчислених значень деформацій від відповідних значень деформацій, що вимірюють у тих же точках спостережень, і по набутих значеннях параметрів встановлюють жорсткість опорного контуру виробу.
Текст
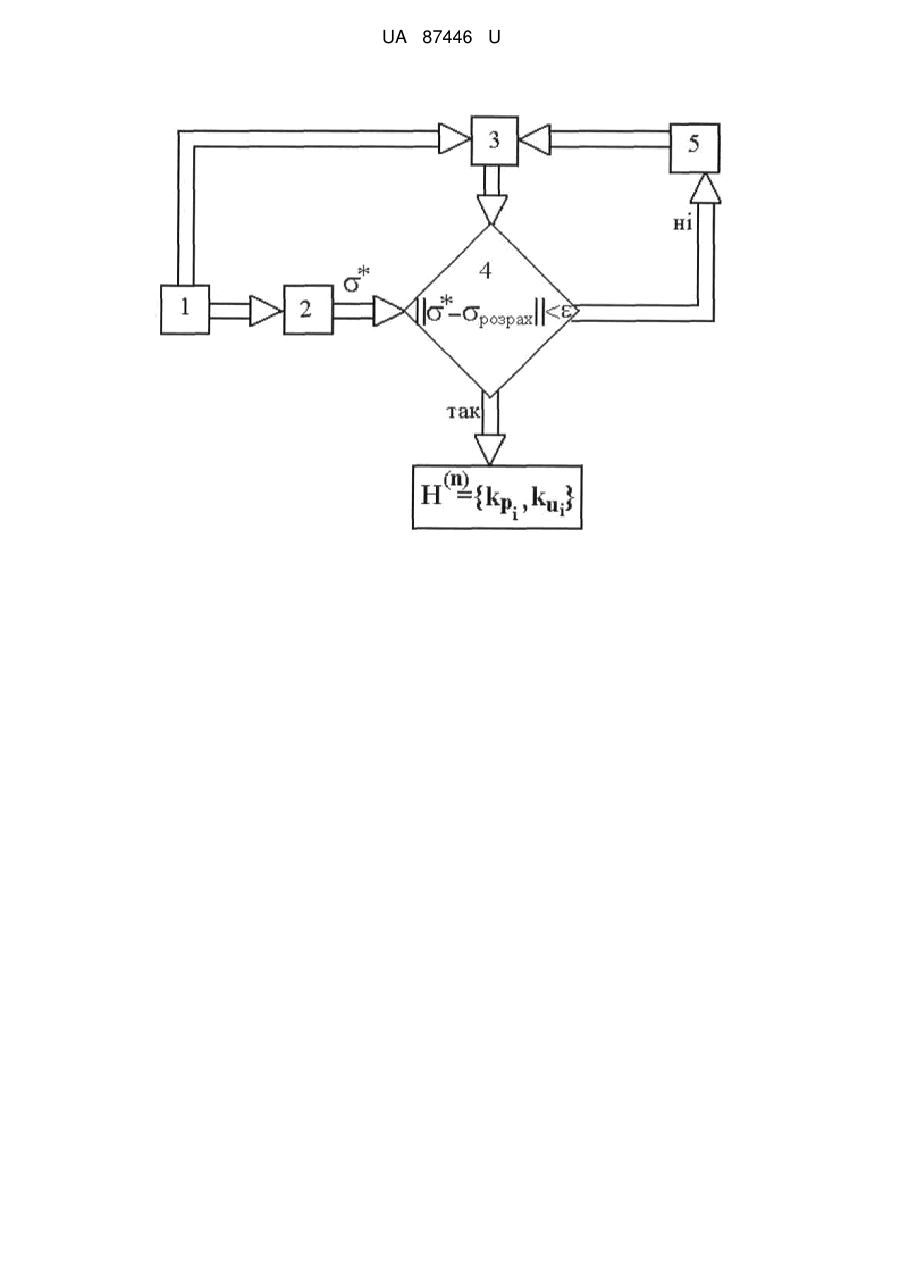
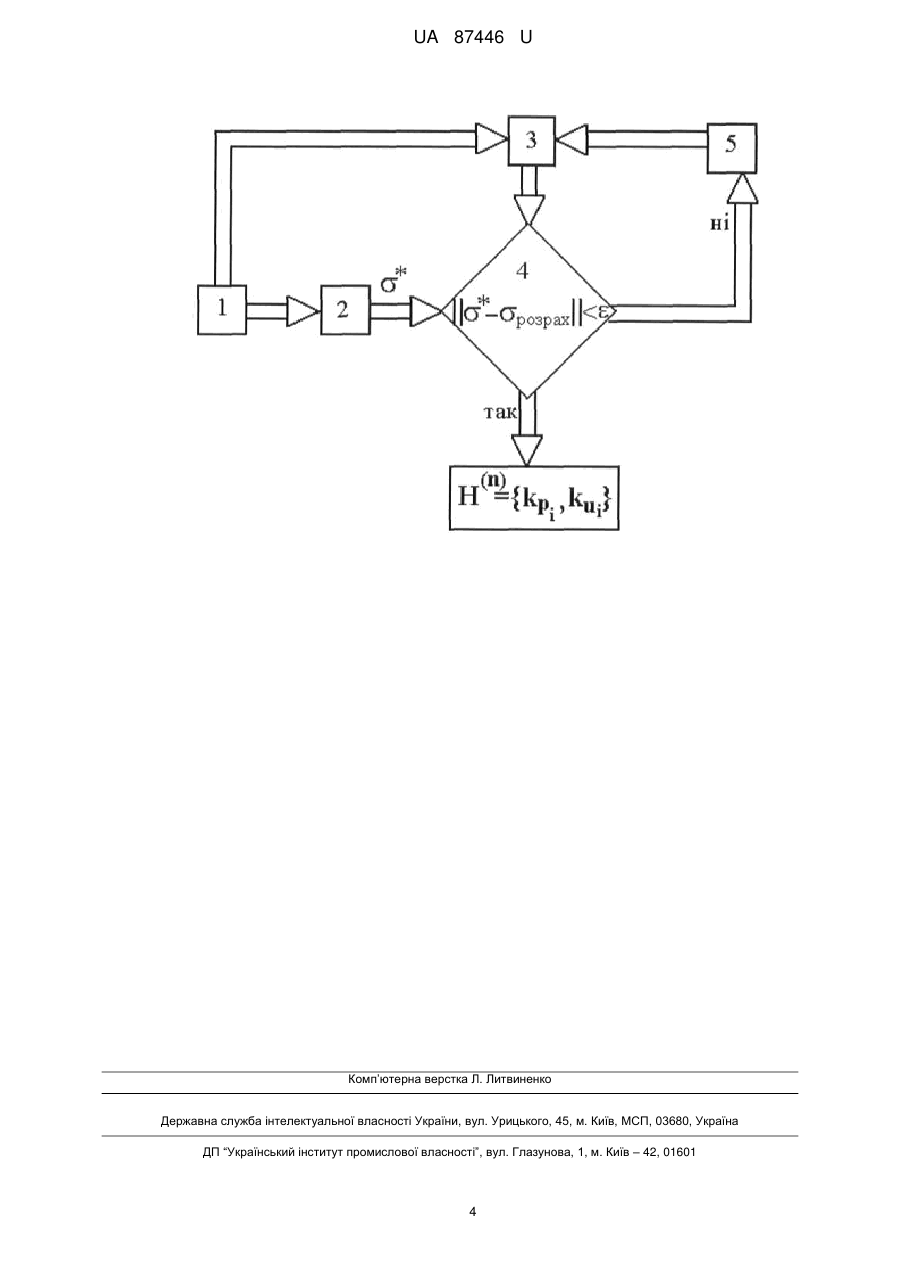
Реферат: Спосіб визначення жорсткості опорного контуру тонких тіл виконують за отриманими даними значень деформацій. При цьому використовують експлуатаційне навантаження для визначення відгуку виробу на це навантаження, як відгук тонкостінної системи виступають значення деформацій зовнішньої і внутрішньої поверхонь тонкостінної системи, які вимірюють в заданих точках поверхні виробу, відповідні обчислені значення деформацій визначають за допомогою методу скінченних елементів з використанням математичної моделі конструкції при відомих умовах закріплення. Опис умов закріплення опорного контуру тонкостінної конструкції, яка знаходиться під дією навантаження, здійснюють шляхом введення коефіцієнтів пружності опор, які обмежують значення вигинних та тангенційних переміщень. При цьому значення коефіцієнтів пружності опор є параметрами та ідентифікують за допомогою алгоритму мінімізації функціоналу, який характеризує середньоквадратичне відхилення обчислених значень деформацій від відповідних значень деформацій, що вимірюють у тих же точках спостережень, і по набутих значеннях параметрів встановлюють жорсткість опорного контуру виробу. UA 87446 U (54) СПОСІБ ВИЗНАЧЕННЯ ЖОРСТКОСТІ ОПОРНОГО КОНТУРУ ТОНКИХ ТІЛ UA 87446 U UA 87446 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до технічної діагностики, а конкретніше - до способу неруйнуючого контролю виробів у процесі виготовлення, монтажу та експлуатації, і може застосовуватися для визначення параметрів напружено-деформованого стану, а саме, жорсткості опорного контуру тонкостінної системи для оцінки реальної несучої здатності та можливості її подальшої експлуатації. Аналогом корисної моделі за можливістю ідентифікації параметрів напруженодеформованого стану тонкостінної системи є спосіб виявлення напружень на підставі вимірювання коерцитивної сили [1]. Суть способу полягає в тому, що для вимірювання напружень у виробі вибирають величину коерцитивної сили, яка пов'язана з пластичною деформацією у виробі в розвантаженому стані. До виробу прикладають ступінчасті навантаження вздовж осі деформації, вимірюють коерцитивні сили на кожному ступені в напруженому стані, а потім знижують навантаження до проміжного рівня, який відповідає розрахунковому рівню робочого напруження. Далі знижують рівень навантаження до нуля і вимірюють значення коерцитивної сили в розвантаженому стані, вводять поправочний коефіцієнт та визначають величину напружено-деформованого стану металу виробу. Однак такий спосіб не дозволяє ідентифікувати параметри напружено-деформованого стану під дією існуючого навантаження у процесі експлуатації виробу і потребує попереднього визначення залежності коерцитивної сили від напружень для кожного конкретного матеріалу. Відомим є також пристрій для визначення механічних напружень, деформацій та зусиль у металах та металевих конструкціях [2], заснований на частотно-імпульсному методі вимірювання часу розповсюдження ультразвуку в тілі. За допомогою вказаного пристрою механічні напруження ідентифікуються за виміряними частотами ультразвукових коливань, які виникають після ініціації ультразвуковим перетворювачем повздовжньої і зсувної хвиль в тілі та встановлення певної частоти проходження імпульсів збудження. Виміряні частоти ультразвукових коливань, які проходять через об'єкт і відбиваються від протилежної поверхні контрольованого об'єкту, є початковими даними для визначення механічних напружень з використанням пружно-акустичного ефекту, при розрахунку напружень використовуються коефіцієнти пружно-акустичного зв'язку, які визначаються шляхом обміру контрольних зразків відповідних матеріалів в навантаженому і ненавантаженому стані. Недоліками вказаного пристрою є необхідність визначення пружно-акустичних коефіцієнтів на контрольних зразках досліджуваних матеріалів заздалегідь, а також недостатня точність визначення механічних напружень, яка викликана похибкою початкових даних - вимірюваний часовий інтервал включає похибку, пов'язану з нестабільністю акустичного середовища, що впливає на параметри ультразвукового сигналу. Найбільш близьким за технічною суттю є спосіб теплового неруйнуючого контролю [3], який полягає в тому, що на контрольовану конструкцію здійснюють вплив теплового потоку, вимірюють густину теплових потоків на зовнішній та внутрішній поверхнях, а також температуру зовнішнього середовища та температури на зовнішній та внутрішній поверхнях конструкції. За результатами спостережень визначають опір теплопередачі, що дозволяє контролювати якість конструкції. Застосування вказаного способу дозволяє визначати параметри об'єкта, коли невідомою є його внутрішня структура та теплофізичні властивості матеріалу. Недоліками вказаного способу є необхідність розташовувати конструкцію у герметичній камері з теплоізолюючими стінами, у які вбудовані системи створення і розподілу заданого температурного режиму, режиму вологості повітря, режиму швидкості руху повітря, що не дозволяє контролювати якість виробу постійно у режимі реального часу. При застосуванні вказаного способу на конструкцію необхідно здійснювати додаткове, крім експлуатаційного, теплове навантаження, що може призвести до суттєвої зміни характеристик її напруженодеформованого стану та знизити точність визначення невідомих параметрів. Крім того, для здійснення розрахунків густину теплового потоку та температуру поверхонь конструкції необхідно вимірювати протягом тривалого часу, що істотно знижує оперативність визначення якості об'єкту дослідження. Задача корисної моделі полягає в підвищенні оперативності та точності визначення параметрів напружено-деформованого стану, а саме, жорсткості опорного контуру тонкостінної системи для оцінці реальної несучої здатності та можливості її подальшої експлуатації. Вирішення поставленої задачі забезпечується тим, що контрольована поверхня виробу знаходиться під дією експлуатаційного навантаження, аналогічного дії теплового потоку, як відгук виробу на це навантаження використовують значення деформацій зовнішньої і внутрішньої поверхонь, виміряні за допомогою датчиків деформацій в заданих точках поверхні, відповідні обчислені значення деформацій визначаються за допомогою методу скінченних 1 UA 87446 U 5 10 15 20 25 30 елементів з використанням математичної моделі конструкції при відомих умовах закріплення опорного контуру, опис умов закріплення опорного контуру тонкостінної конструкції, яка знаходиться під дією навантаження, здійснюється шляхом введення коефіцієнтів пружності опор, що обмежують значення вигинних та тангенційних переміщень, при цьому значення коефіцієнтів пружності опор є параметрами та ідентифікують за допомогою алгоритму мінімізації функціоналу, який характеризує середньоквадратичне відхилення обчислених значень деформацій від відповідних значень деформацій, що вимірюють у тих же точках спостережень, і по набутих значеннях параметрів встановлюють жорсткість опорного контуру виробу. Перевага запропонованого підходу у порівнянні з відомими полягає в тому, що здійснюється дистанційне діагностування тонкостінної системи, яка знаходиться в умовах експлуатації, для визначення параметрів непрямих вимірів використовується експлуатаційне навантаження, що дозволяє у поєднанні з обчислювальними алгоритмами ідентифікувати жорсткість опорного контуру тонкостінної конструкції з достатньої для оцінки реальної несучої здатності точністю, використовувати стандартні обчислювальні алгоритми методу скінченних елементів, методів адаптації типу Ньютона. При цьому пропонована послідовність операцій навантаження, вимірювання і обчислення, прийнята послідовність обробки вимірювальної інформації характеризує причинно-наслідкові зв'язки між поставленою задачею і ознаками корисної моделі. Спосіб визначення жорсткості опорного контуру тонкостінної конструкції пояснюється кресленням. Він полягає в тому, що зовнішня і внутрішня поверхні тонкостінної системи - об'єкта дослідження (блок 1), який знаходиться під дією експлуатаційного навантаження, оснащується датчиками деформацій, які вимірюють значення деформацій у точках поверхні, по яких * формується вектор деформацій у блоці обробки інформації 2. Одночасно інформація про навантаження, під дією якого знаходиться спостережувана тонкостінна система, подається до математичної моделі (блок 3), яка враховує параметризовану модель жорсткості опорного контуру у вигляді вектора коефіцієнтів жорсткості опор та обчислює значення деформацій розрах також у точках поверхні, де розташовані датчики вимірювання деформацій. Порівняння * значень і розрах відбувається у блоці 4. У випадку, коли різниця між цими величинами перевищує задане значення, включається блок адаптації 5 і обчислюється наступне наближення параметрів, що характеризують жорсткість опорного контуру. Процес при досягненні вектора в обчислювальному блоці (блок 3) за допомогою математичної моделі конструкції з врахуванням параметризованої моделі жорсткості опорного контуру. Ідентифікація вектора параметрів H k p i , k ui реалізується у блоці адаптації 5 чисельно у вигляді ітеративного адаптивного алгоритму: 50 M 2 j 45 j1 40 нормою j * X j розраx X j ,H , j 1,M заданого значення ε. Модель жорсткості опорного контуру, яка параметризується, представлена вектором коефіцієнтів жорсткостей опор H k pi ,k ui , заданим в точках з координатами Xi xi , y i , і 1,N ; k pi k u i - коефіцієнти жорсткості опор, які обмежують вигинні та тангенційні переміщення. Алгоритм ідентифікації компонент вектора H використовує матрицю чутливості j * A aij , , , j 1, M , де X j x j , y j - точки вимірювання деформацій j , j 1, M , Hi і 1 N * j X j розрах Х j, H , розрах Х j , H - розрахункові значення деформацій, які визначаються 35 закінчується Hn Hn1 Gn1n1 , де Gn 1 A T 1 A n 1 A T 1 , n - номер ітерації. n n Блоки навантаження і вимірювань можуть бути виконані традиційними методами. Блоки математичної моделі і адаптації використовують персональні комп'ютери, пакет прикладних програм визначення напружено-деформованого стану (наприклад, COSMOS, ANSYS, NASTRAN) і програмну реалізацію алгоритму адаптації. Запропонований спосіб в порівнянні з найближчим аналогом має такі переваги: 1) ширший діапазон застосування: запропонованим способом можна визначити параметри напружено-деформованого стану виробу під дією експлуатаційного навантаження, тобто не 1 2 UA 87446 U 5 10 15 20 збуджувати у виробі додаткових, відмінних від експлуатаційного навантаження, збурень, як це пропонується у найближчому аналозі; 2) вища точність: запропонований спосіб використовує як відгук системи вимірювання деформацій, що в порівнянні з пропонованими у найближчому аналозі вимірюваннями густини теплового потоку та температурами, для яких існує похибка, пов'язана з нестаціонарністю процесу теплопередачі у часі, забезпечує вищу точність вимірювань спостережуваних параметрів; 3) оперативність: запропонований спосіб забезпечує отримання інформації про стан закріплення опорного контуру в режимі реального часу, на відміну від найближчого аналога, у якому контрольовану конструкцію необхідно розташовувати у герметичної камері, а необхідні для розрахунків дані вимірювати протягом тривалого часу. За технічним рішенням, яке заявляється, були проведені лабораторні випробування з позитивними результатами. Реалізація способу можлива також і в промисловості. Джерела інформації: 1. Патент на винахід UA 40064 А1, кл. G01L 1/00. Спосіб визначення напружень у трубопроводах на підставі вимірювання коерцитивної сили. 2. Авторское свидетельство СССР 1756815, А1, кл. G01N 29/18. Устройство для контроля механических напряжений в твердых средах. 3. Авторское свидетельство RU 2262686, С1, кл. G01N 25/72 Способ теплового неразрушающего контроля. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 Спосіб визначення жорсткості опорного контуру тонких тіл, у якому за отриманими даними значень деформацій визначають жорсткість опорного контуру тонких тіл, який відрізняється тим, що використовують експлуатаційне навантаження для визначення відгуку виробу на це навантаження, як відгук тонкостінної системи виступають значення деформацій зовнішньої і внутрішньої поверхонь тонкостінної системи, які вимірюють в заданих точках поверхні виробу, відповідні обчислені значення деформацій визначають за допомогою методу скінченних елементів з використанням математичної моделі конструкції при відомих умовах закріплення, опис умов закріплення опорного контуру тонкостінної конструкції, яка знаходиться під дією навантаження, здійснюють шляхом введення коефіцієнтів пружності опор, які обмежують значення вигинних та тангенційних переміщень, при цьому значення коефіцієнтів пружності опор є параметрами та ідентифікують за допомогою алгоритму мінімізації функціоналу, який характеризує середньоквадратичне відхилення обчислених значень деформацій від відповідних значень деформацій, що вимірюють у тих же точках спостережень, і по набутих значеннях параметрів встановлюють жорсткість опорного контуру виробу. 3 UA 87446 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюObodan Natalia Illivna, Huk Natalia Anatoliivna, Patsiuk Anatolii Hryhorovych, Polishko Oleksii Oleksii Mykolaiovych
Автори російськоюОбодан Наталья Ильинична, Гук Наталия Анатолиевна, Пацюк Анатолий Григорьевич, Полишко Алексей Николаевич
МПК / Мітки
МПК: G01L 1/00
Мітки: спосіб, визначення, тіл, контуру, тонких, опорного, жорсткості
Код посилання
<a href="https://ua.patents.su/6-87446-sposib-viznachennya-zhorstkosti-opornogo-konturu-tonkikh-til.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення жорсткості опорного контуру тонких тіл</a>
Спосіб діагностики товщини тонких тіл

Номер патенту: 87439
Опубліковано: 10.02.2014
Автори: Пацюк Анатолій Григорович, Ободан Наталія Іллівна, Гук Наталія Анатоліївна, Полішко Олексій Миколайович
МПК: G01B 17/02, G01B 5/02
Мітки: спосіб, тонких, діагностики, тіл, товщини
Формула / Реферат:
Спосіб діагностики товщини тонких тіл, який полягає у вимірюванні значень деформацій під дією експлуатаційного навантаження, і за отриманими значеннями визначають розподіл товщини у виробі, який відрізняється тим, що використовують експлуатаційне навантаження і відгук виробу на це навантаження, а як відгук тонкостінної системи виступають значення деформацій зовнішньої і внутрішньої поверхонь тонкостінної системи, які вимірюють в точках...
Спосіб визначення величини сектора забруднення на поверхні опорного ізолятора
Номер патенту: 58305
Опубліковано: 11.04.2011
Автор: Сіріков Олександр Іванович
МПК: H02H 7/26
Мітки: спосіб, величини, визначення, поверхні, забруднення, ізолятора, опорного, сектора
Формула / Реферат:
Спосіб визначення величини забруднення на поверхні опорного ізолятора, який полягає у вимірюванні поверхневого струму витоку ізолятора і контролі за його значенням ступеня забруднення поверхні, який відрізняється тим, що для визначення величини сектора забруднення поверхневий струм витоку розкладається на активну і реактивну складові, за якими і визначається величина сектора забруднення поверхні.
Спосіб діагностики пошкоджень в тонких тілах
Номер патенту: 87438
Опубліковано: 10.02.2014
Автори: Пацюк Анатолій Григорович, Ободан Наталія Іллівна, Полішко Олексій Миколайович, Гук Наталія Анатоліївна
МПК: G01B 11/16
Мітки: пошкоджень, тонких, спосіб, тілах, діагностики
Формула / Реферат:
Спосіб діагностики пошкоджень в тонких тілах, який полягає в тому, що на контрольованій поверхні під дією експлуатаційного навантаження визначають наявність пробоїн в виробі, який відрізняється тим, що використовують експлуатаційне навантаження і відгук тонкого тіла на це навантаження, як відгук тонкого тіла використовують значення деформацій зовнішньої і внутрішньої поверхонь тонкого тіла, які вимірюють в заданих точках, відповідні...
Спосіб визначення координат центру жорсткості пружно підвішеної платформи
Номер патенту: 46330
Опубліковано: 15.05.2002
Автори: Санкін Анатолій Олексійович, Богдан Кім Степанович, Корнієць Ірина Василівна, Тарасевич Микола Іванович
МПК: G01G 23/00, G01M 5/00
Мітки: жорсткості, платформи, центру, координат, підвішеної, пружної, визначення, спосіб
Формула / Реферат:
Спосіб визначення координат центру жорсткості пружно підвішеної платформи, який включає послідовне прикладання еталонного вантажу по кутах та в центрі платформи, вимірювання сумарної деформації пружного підвісу відносно нерухомої основи, який відрізняється тим, що проводять принаймні п'ять циклів навантаження платформи еталонним вантажем по кутах та в центрі, визначають середні значення лінійного переміщення центру симетрії платформи для...
Спосіб визначення жорсткості тканини при згині
Номер патенту: 54194
Опубліковано: 17.02.2003
Автори: Орловський Броніслав Вікентійович, Тропша Дмитро Анатолійович, Абрінова Наталія Сергіївна
МПК: G01N 33/36
Мітки: жорсткості, згині, тканини, спосіб, визначення
Формула / Реферат:
Спосіб визначення жорсткості тканини при згині, який включає попередню підготовку зразка тканини шляхом надання зразку форми кільця, його навантаження, вимірювання параметрів та визначення жорсткості, який відрізняється тим, що на зразок у формі кільця наносять верхній, нижній, лівий та правий маркери у відповідних точках кільця, які знаходяться на кінцях взаємно перпендикулярних діаметрів, що проведені, відповідно, паралельно осі ОХ та OY,...
Попередній патент: Газорідинний фільтр-сепаратор
Наступний патент: Спосіб вибору точок вимірювань параметрів стану при діагностиці тонкостінної конструкції
Випадковий патент: Спосіб керування модульним багаторівневим інвертором напруги