Спосіб перетворення притискаючої сили в крутний момент
Формула / Реферат
Спосіб перетворення притискаючої сили у крутний момент, у якому колесо, встановлене на опорній поверхні, навантажують притискаючою до опорної поверхні силою, у результаті чого в опорній поверхні в зоні контакту опорної поверхні з колесом виникають пружні мікродеформації, які спричиняють реакцію опори, яка направлена по нормалі до зони контакту опорної поверхні об колесо, який відрізняється тим, що опорна поверхня виконана у вигляді кола, на якому установлюють колесо, яке одягнене на палець тангенціального повзуна, тангенціальний повзун посаджений на тангенціальну напрямну, тангенціальний повзун пов'язаний з тангенціальною напрямною пружним елементом, у свою чергу тангенціальна напрямна з'єднана з радіальним повзуном, радіальний повзун посаджений на радіальну напрямну, радіальна напрямна з'єднана з валом, встановленим по осі кола, при цьому колесо з тангенціальним повзуном і тангенціальною напрямною із пружним елементом, і з радіальним повзуном об'єднані в групу елементів, центральносиметрично до осі кола якої розташована друга група елементів аналогічного складу, із спільними для двох груп радіальною напрямною та валом, на палець кожного радіального повзуна одягнена головка індивідуального важеля, друга головка індивідуального важеля одягнена на палець повзуна керування, повзун керування посаджений на вал і виконаний з підшипниковим вузлом, у якому до підшипникового вузла прикладають силу, якою в обмеженому інтервалі переміщають підшипниковий вузол з повзуном керування уздовж осі вала в напрямку від площини груп елементів, при цьому повертають важелі та переміщають радіальні повзуни з тангенціальними напрямними по радіальних напрямних до осі вала, одночасно із цим переміщають тангенціальні повзуни з колесами по тангенціальних напрямних від осі радіальної напрямної так, що переміщають колеса уздовж поверхні кола, і при цьому тангенціальними повзунами деформують пружні елементи, у результаті чого кожне колесо навантажують радіально направленою притискаючою силою, складеною з векторної суми притискаючої радіальний повзун уздовж осі радіальної напрямної до осі кола сили із першою силою з пари сил пружності, яку прикладають до тангенціального повзуна, та вона направлена до осі нормальної напрямної, у результаті навантаження кола в колі виникає радіально направлена реакція опори кола, яка з векторною сумою сил взаємно знищують одна одну, а другою з пари сил пружності, яка неврівноважена, яку прикладають на тангенціальну напрямну, якою від тангенціальної напрямної через радіальний повзун з радіальною напрямною навантажують вал, і двома другими силами пружності, які рівні по величині та направлені по осях своїх тангенціальних напрямних, які паралельні між собою і направлені в протилежні сторони, утворюють неврівноважений крутний момент, який прикладають до вала.
Текст
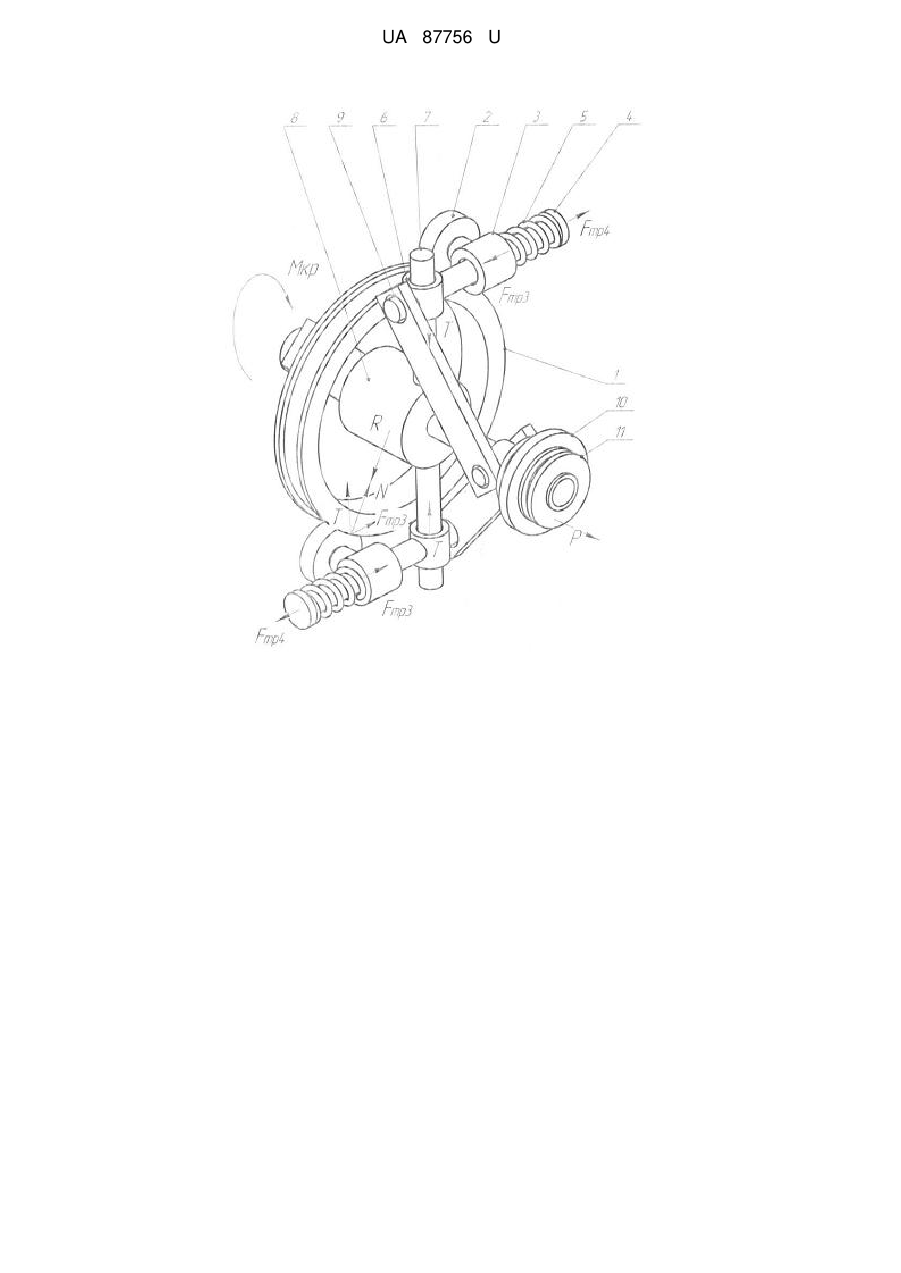
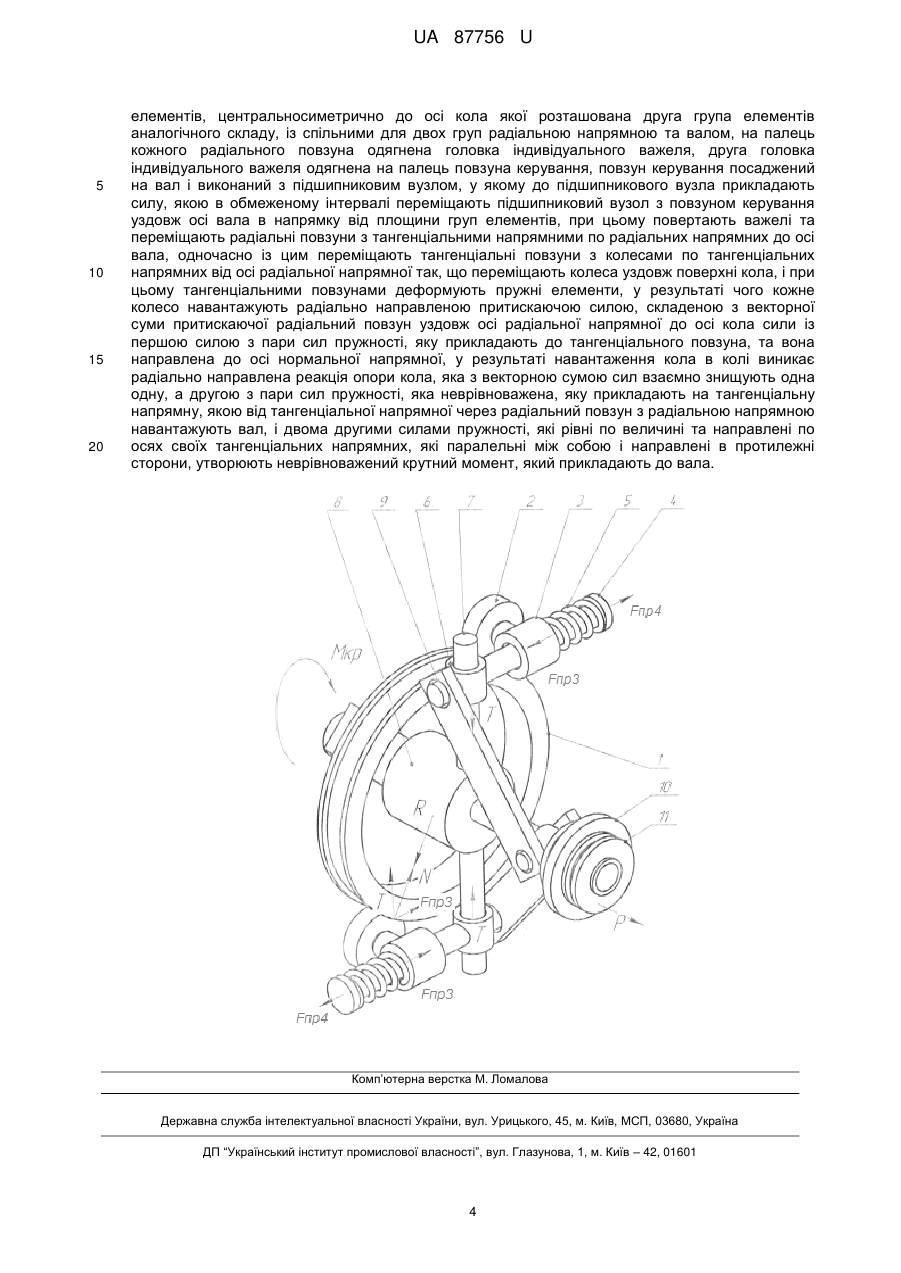
Реферат: UA 87756 U UA 87756 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до силових конверторів, які перетворюють статичні сили в динамічні пари сил - крутні моменти, що може бути використане в автономних джерелах обертання. Загальновідомий спосіб перетворення притискаючої сили у переміщуючу силу, у якому колесо, встановлене на плоскій похилій опорній поверхні, навантажують притискаючою до опорної поверхні силою, прикладеною до осі колеса, і направленою під кутом до нормалі в зоні контакту колеса з опорною поверхнею, у результаті якого в опорній поверхні виникає реакція опори, направлена по нормалі до опорної поверхні до зони контакту колеса з опорною поверхнею, з векторною сумою притискаючої сили і реакції опори, відмінної від нуля і направленої тангенціально, до зони контакту колеса об опорну поверхню. Загальновідомий спосіб перетворення притискаючої сили у переміщаючу силу, реалізується в склізах, застосовуваних для переміщення вантажів-деталей шляхом їхнього вільного перекочування під дією сили тяжіння в різних транспортних операціях при їхньому виробництві та зберіганні. Детальніше дивитись книгу А.Н. Малов "Механізація та автоматизація універсальних металорізальних верстатів. - М.: Машинобудування, 1969. Дивитись текст на стр. 214 і Рис. IV-12 на стр. 216. Одним з недоліків загальновідомого способу перетворення притискуючої сили у переміщуючу силу є обмеження впливу розмірного фактора - шляху, який проходить колесо по опорній поверхні, у наслідку того, що величина плоскої опорної поверхні може мати тільки обмежену довжину. Другим з недоліків є обмеження впливу силового фактора - використання зовнішньої сили, що має обмежену довжину лінії дії притискаючої сили (що безпосередньо спричиняє переміщення колеса), яка пов'язана з рухом по опорній поверхні. Підсумком недоліків з їхніми наслідками є обмеження можливості використання. Наслідком недоліків з їхніми наслідками є обмеження можливостей використання перетворення одних розмірно-силових факторів (притискаючої сили) в інші розмірно-силові фактори (переміщуючу силу та крутний момент), чим обмежена область використання перетворення одних розмірно-силових факторів в інші. В основу корисної моделі поставлено задачу здійснення способу перетворення притискаючих сил у крутний момент, у якому в результаті забезпечується виключення впливу шляху, що проходить колесо по опорній поверхні (яка виконана у формі кола), на силове перетворення, і використання як притискаючої сили векторної суми двох взаємоперпендикулярних сил (безпосередня дія яких першої на другу, і другої на першу виключено), перша з яких пов'язана із зовнішньою силою, при відсутності впливу переміщення колеса по опорній поверхні на лінію дії першої та зовнішньої сил, і друга сила одна з пари внутрішніх сил, отриманих при переміщенні тангенціального повзуна в напрямку перпендикулярному напрямку дії першої сили, яка пов'язана із зовнішньою силою опосередковано через реакцію опори, причому векторну суму сил взаємно знищують із реакцією опори, а другу з пари внутрішніх сил, яка неврівноважена, передають на вал і використовують для обертання вала, і за рахунок цього підвищена ефективність перетворення одних розмірносилових факторів в інші. Поставлена задача вирішується способом перетворення притискаючих сил у крутний момент, у якому колесо, встановлене на опорній поверхні, навантажують притискаючою до опорної поверхні силою, у результаті чого в опорній поверхні в зоні контакту опорної поверхні з колесом виникають пружні мікродеформації, які спричиняють реакцію опори, яка направлена по нормалі до зони контакту опорної поверхні об колесо, і, згідно з корисною моделлю, опорна поверхня виконана у вигляді кола, на якому установлене колесо, яке одягнене на палець тангенціального повзуна, тангенціальний повзун посаджений на тангенціальну напрямну, тангенціальний повзун пов'язаний з тангенціальною напрямною пружним елементом, у свою чергу тангенціальна напрямна з'єднана з радіальним повзуном, радіальний повзун посаджений на радіальну напрямну, радіальна напрямна з'єднана з валом, встановленим по осі кола, при цьому колесо з тангенціальним повзуном і тангенціальною напрямною із пружним елементом, і з радіальним повзуном об'єднані в групу елементів, центральносиметрично до осі кола якої розташована друга група елементів аналогічного складу, із спільними для двох груп радіальною напрямною та валом, на палець кожного радіального повзуна одягнена головка індивідуального важеля, друга головка індивідуального важеля одягнена на палець повзуна керування, повзун керування посаджений на вал і виконаний з підшипниковим вузлом, у якому до підшипникового вузла прикладають силу, якою в обмеженому інтервалі переміщають підшипниковий вузол з повзуном керування уздовж осі вала в напрямку від площини груп елементів, при цьому повертають важелі та переміщають радіальні повзуни з тангенціальними напрямними по 1 UA 87756 U 5 10 15 20 25 30 35 40 45 50 55 60 радіальних напрямних до осі вала, одночасно із цим переміщають тангенціальні повзуни з колесами по тангенціальних напрямних від осі радіальної напрямної так, що переміщають колеса уздовж поверхні кола, і при цьому тангенціальними повзунами деформують пружні елементи, у результаті чого кожне колесо навантажують радіально направленою притискаючою силою, складеною з векторної суми притискаючої радіальний повзун уздовж осі радіальної напрямної до осі кола сили із першою силою з пари сил пружності, яку прикладають до тангенціального повзуна, та вона направлена до осі нормальної напрямної, у результаті навантаження кола в колі виникає радіально направлена реакція опори кола, яка з векторною сумою сил взаємно знищують одна одну, а другою з пари сил пружності, яка неврівноважена, яку прикладають на тангенціальну напрямну, якою від тангенціальної напрямної через радіальний повзун з радіальною напрямною навантажують вал, і двома другими силами пружності, які рівні по величині та направлені по осях своїх тангенціальних напрямних, які паралельні між собою і направлені в протилежні сторони, утворюють неврівноважений крутний момент, який прикладають до вала. Спосіб перетворення притискаючої сили у крутний момент реалізується в обертальній машині. Корисна модель пояснюється графічними матеріалами, у яких показана будова обертальної машини. В обертальну машину включені: опорна поверхня 1, виконана у вигляді кола, на якому установлене колесо 2, яке одягнене на палець тангенціального повзуна 3, тангенціальний повзун 3 посаджений на тангенціальну напрямну 4, тангенціальний повзун 3 пов'язаний з тангенціальною напрямною 4 пружним елементом 5, у свою чергу тангенціальна напрямна 4 з'єднана з радіальним повзуном 6, радіальний повзун 6 посаджений на радіальну напрямну 7, радіальна напрямна 7 з'єднано з валом 8, встановленим по осі кола 1. При цьому колесо 2 з тангенціальним повзуном 3 і тангенціальною напрямною 4 із пружним елементом 5, і з радіальним повзуном 6 об'єднані в групу елементів - 2, 3, 4, 5, 6, до якої центральносиметрично осі кола 1 розташована друга група елементів - 2, 3, 4, 5, 6 аналогічного складу із спільними для двох груп радіальною напрямною 7 і валом 8. На палець кожного радіального повзуна 6 одягнена головка індивідуального важеля 9, інша головка індивідуального важеля 9 одягнена на палець повзуна керування 10, повзун керування 10 посаджений на вал 8 і виконаний з підшипниковим вузлом 11, з можливістю прикладання до підшипникового вузла 11 зовнішньої сили "Р", з переміщенням в обмеженому інтервалі підшипникового вузла 11 з повзуном керування 10 уздовж осі вала 8 у напрямку від площини груп елементів - 2, 3, 4, 5, 6. При повороті важелів 9 і переміщенні радіальних повзунів 6 з тангенціальними напрямними 4 по радіальних напрямних 7 до осі вала 8, при одночасному переміщенні тангенціальних повзунів 3 з колесами 2 по тангенціальних напрямних 4 від осі радіальної напрямної 7, з переміщенням коліс 2 уздовж поверхні кола 1, і при цьому тангенціальними повзунами 3 деформовані пружні елементи 5, при якому кожне колесо 2 навантажене радіально направленою притискаючою силою, складеною з векторної суми "N", притискаючої радіальний повзун 6 уздовж осі радіальної напрямної 7 до осі кола 1 сили "Т", викликаної від зовнішнього впливу "Р" на підшипниковий вузол 11, і з одною "Fпр3" з пари сил пружності "Fпр3" і "Fпр4", яка прикладена до тангенціального повзуна 3 і яка направлена до осі нормальної напрямної 7, у результаті якого в колі 1 створені умови виникнення радіально спрямованої реакції опори "R" кола 1, яка з векторною сумою сил "N" взаємно знищують одна одну. Другою "Fпр4" кожною з пари сил пружності Fпр3" і "Fпр4", яка прикладена на тангенціальну напрямну 4, яка неврівноважена, якою ("Fпр4") від тангенціальної папрямної 4 через радіальний повзун 6 з радіальною напрямною 7 навантажений вал 8, і двома другими силами пружності "Fпр4", які рівні по величині та направлені по осях своїх тангенціальних напрямних 4, які паралельні між собою, причому направлені в протилежні сторони утворений неврівноважений крутний момент Мкр. Обертальна машина працює в такий спосіб. До підшипникового вузла 11 прикладають силу "Р", якою в обмеженому інтервалі переміщають підшипниковий вузол 11 з повзуном керування 10 уздовж осі вала 8 у напрямку від площини груп елементів - 2, 3, 4, 5, 6. При цьому повертають важелі 9 і перемішають радіальні повзуни 6 з тангенціальними напрямними 4 по радіальних напрямних 7 до осі вала 8. Одночасно із цим переміщають тангенціальні повзуни 3 з колесами 2 по тангенціальних напрямних 4 від осі радіальної напрямної 7, при якому переміщають колеса 2 уздовж поверхні кола 1. При цьому тангенціальними повзунами 3 деформують пружні елементи 5. У результаті цього кожне колесо 2 навантажують радіально направленою притискаючою силою "N", складеною з векторної суми, притискаючою радіальний повзун 6 уздовж осі радіальної напрямної 7 до осі кола 1 силою "Т", і з першою силою "Fпр3" з пари сил "Fпр3" і "Fпр4" пружності, яку прикладають до тангенціального повзуна 3, і вона 2 UA 87756 U 5 10 15 20 25 30 35 40 45 направлена до осі нормальної напрямної 7. У результаті навантаження силою "N" кола 1 у колі 1 виникає радіально направлена реакція "R" опори кола 1, яка разом з векторною сумою сил "N" взаємно знищують одна одну. Другою, "Fпр4" з пари "Fпр3" і "Fпр4" сил пружності, яка є неврівноважена, яку прикладають на тангенціальну напрямну 4, від тангенціальної напрямної 4 через радіальний повзун 6 з радіальною напрямною 7 навантажують вал 8. Двома другими "Fпр4" силами пружності, які рівні по величині та направлені по осях своїх тангенціальних напрямних 4, які паралельні між собою і направлені в протилежні сторони, утворюють неврівноважений крутний момент Мкр, який прикладають до вала 8. Завдяки тому, що виключено вплив шляху, пройденого колесом 2 по опорній поверхні кола 1 на силове перетворення (вплив розмірного фактора), і завдяки тому, що використано як притискаючу силу "N" векторну суму двох взаємоперпендикулярних сил "Т" і "Fпр3", (безпосередню дія яких, першої "Т" на другу "Fпр3", і другої "Fпр3" на першу "Т" виключено, але вона здійснюється опосередковано через реакцію "R" опори кола 1), перша "Т" з яких пов'язана із зовнішньою силою "Р", при відсутності впливу переміщення колеса 2 по опорній поверхні кола 1 на лінію дії першої сили "Т" і зовнішньої сили "Р", і друга сила "Fпр3" одна з пари "Fпр3" і "Fпр4" внутрішніх сил, отриманих при переміщенні тангенціального повзуна 3 у напрямку, перпендикулярному напрямку дії першої сили "Т", причому векторну суму сил "N" взаємно знищують із реакцією опори "R", при цьому використано два колеса 2, у кожного колеса 2 своя реакція опори "R" кола 1, які також взаємно знищують одна "R" другу "R". А другу силу "Fпр4" з пари "Fпр3" і "Fпр4" внутрішніх сил, яка неврівноважена, передають на вал 8 і використовують для утворення крутного моменту Мкр і обертання вала 8. Одержуване обертання механізму обертальної машини викликане крутним моментом Мкр, величина якого не має прямої залежності від кутової швидкості обертання вала 8, але при збільшенні кутової швидкості обертання будуть викликані коливальні явища, викликані перекосами та підклинюванням коліс 2 по бігових доріжках кола 1, що буде збільшувати внутрішнє тертя в механізмі та знижувати ефективність одержання крутного обертального моменту Мкр і викликаного ним обертання, і у швидкісній характеристиці буде зміна величини одержуваного крутного обертального моменту Мкр залежно від величини кутової швидкості обертання вала 8, залежність лінії буде мати форму гіперболи. Як приклад розглянута обертальна машина однобічного обертання, але при установці чотирьох коліс 2. Обертальна машина буде реверсивного ходу. Як приклад можливого використання обертальної машини на сухопутному транспортному засобі розглянута платформа, що містить чотири колеса, пов'язані із чотирма обертальними машинами, у якої вали 8 обертальних машин виконані пов'язаними з маточинами коліс транспортною засобу, а кола 1 обертальних машин закріплені на рамі платформи. Управління рухом платформи здійснюється передачею силових навантажень на обертальні машини, пов'язані з колесами транспортного засобу гнучкими тросами по гнучких каналах або каналах тиску повітря по пневматичних магістралях до пневмоциліндрів обертальних машин, що спричинить обертання обертальних машин з колесами з різними або однаковими швидкостями, залежно від необхідних для руху транспортного засобу або його повороту або розвороту (подібно гусеничній машині). Техніко-економічиий ефект від використання способу перетворення притискаючої сили у крутний момент полягає увиключенні обмеження впливу розмірів опорної поверхні та виключенні впливу переміщення в напрямку дії притискаючої сили під час руху під її дією, і за рахунок цього підвищена ефективність перетворення одних розмірно-силових факторів в інші, чим розширена область їх використання. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 60 Спосіб перетворення притискаючої сили у крутний момент, у якому колесо, встановлене на опорній поверхні, навантажують притискаючою до опорної поверхні силою, у результаті чого в опорній поверхні в зоні контакту опорної поверхні з колесом виникають пружні мікродеформації, які спричиняють реакцію опори, яка направлена по нормалі до зони контакту опорної поверхні об колесо, який відрізняється тим, що опорна поверхня виконана у вигляді кола, на якому установлюють колесо, яке одягнене на палець тангенціального повзуна, тангенціальний повзун посаджений на тангенціальну напрямну, тангенціальний повзун пов'язаний з тангенціальною напрямною пружним елементом, у свою чергу тангенціальна напрямна з'єднана з радіальним повзуном, радіальний повзун посаджений на радіальну напрямну, радіальна напрямна з'єднана з валом, встановленим по осі кола, при цьому колесо з тангенціальним повзуном і тангенціальною напрямною із пружним елементом, і з радіальним повзуном об'єднані в групу 3 UA 87756 U 5 10 15 20 елементів, центральносиметрично до осі кола якої розташована друга група елементів аналогічного складу, із спільними для двох груп радіальною напрямною та валом, на палець кожного радіального повзуна одягнена головка індивідуального важеля, друга головка індивідуального важеля одягнена на палець повзуна керування, повзун керування посаджений на вал і виконаний з підшипниковим вузлом, у якому до підшипникового вузла прикладають силу, якою в обмеженому інтервалі переміщають підшипниковий вузол з повзуном керування уздовж осі вала в напрямку від площини груп елементів, при цьому повертають важелі та переміщають радіальні повзуни з тангенціальними напрямними по радіальних напрямних до осі вала, одночасно із цим переміщають тангенціальні повзуни з колесами по тангенціальних напрямних від осі радіальної напрямної так, що переміщають колеса уздовж поверхні кола, і при цьому тангенціальними повзунами деформують пружні елементи, у результаті чого кожне колесо навантажують радіально направленою притискаючою силою, складеною з векторної суми притискаючої радіальний повзун уздовж осі радіальної напрямної до осі кола сили із першою силою з пари сил пружності, яку прикладають до тангенціального повзуна, та вона направлена до осі нормальної напрямної, у результаті навантаження кола в колі виникає радіально направлена реакція опори кола, яка з векторною сумою сил взаємно знищують одна одну, а другою з пари сил пружності, яка неврівноважена, яку прикладають на тангенціальну напрямну, якою від тангенціальної напрямної через радіальний повзун з радіальною напрямною навантажують вал, і двома другими силами пружності, які рівні по величині та направлені по осях своїх тангенціальних напрямних, які паралельні між собою і направлені в протилежні сторони, утворюють неврівноважений крутний момент, який прикладають до вала. Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F03G 3/08
Мітки: притискаючої, крутний, сили, перетворення, момент, спосіб
Код посилання
<a href="https://ua.patents.su/6-87756-sposib-peretvorennya-pritiskayucho-sili-v-krutnijj-moment.html" target="_blank" rel="follow" title="База патентів України">Спосіб перетворення притискаючої сили в крутний момент</a>
Спосіб перетворення притискних сил в крутний момент
Номер патенту: 82032
Опубліковано: 25.07.2013
Автор: Чугуй Володимир Леонідович
МПК: F16H 13/00
Мітки: момент, крутний, притискних, спосіб, перетворення, сіль
Формула / Реферат:
Спосіб перетворення притискних сил у крутний момент, у якому колесо виконано у формі диска, яке встановлено на опорну поверхню, яке навантажують притискними до опорної поверхні силами , у результаті чого в опорній поверхні виникають сили реакції опори , які направлені від опорної поверхні на колесо по...
Спосіб перетворення сил інерції в крутний момент
Номер патенту: 45581
Опубліковано: 15.04.2002
Автор: Чугуй Володимир Леонідович
МПК: F03G 3/00
Мітки: перетворення, момент, спосіб, інерції, крутний, сіль
Формула / Реферат:
Спосіб перетворення сил інерції в крутний момент, в якому отримують сили інерції з середніми за період руху кривошипно-коромислового механізму векторними величинами, більшими нуля, для чого здійснюють обертання кривошипного вала навколо осі корінних шийок кривошипного вала, разом зі зворотно-кутовим поворотом шатуна, кривошипна голівка якого досаджена на шатунну шийку кривошипного вала, а коромислова голівка якого посаджена на шатунний...
Перетворювач енергії тиску у крутний момент (варіанти)
Номер патенту: 88572
Опубліковано: 26.10.2009
Автори: Булат Анатолій Федорович, Біляков Віктор Миколайович
МПК: F04C 18/24, F04C 2/24
Мітки: енергії, варіанти, крутний, момент, тиску, перетворювач
Формула / Реферат:
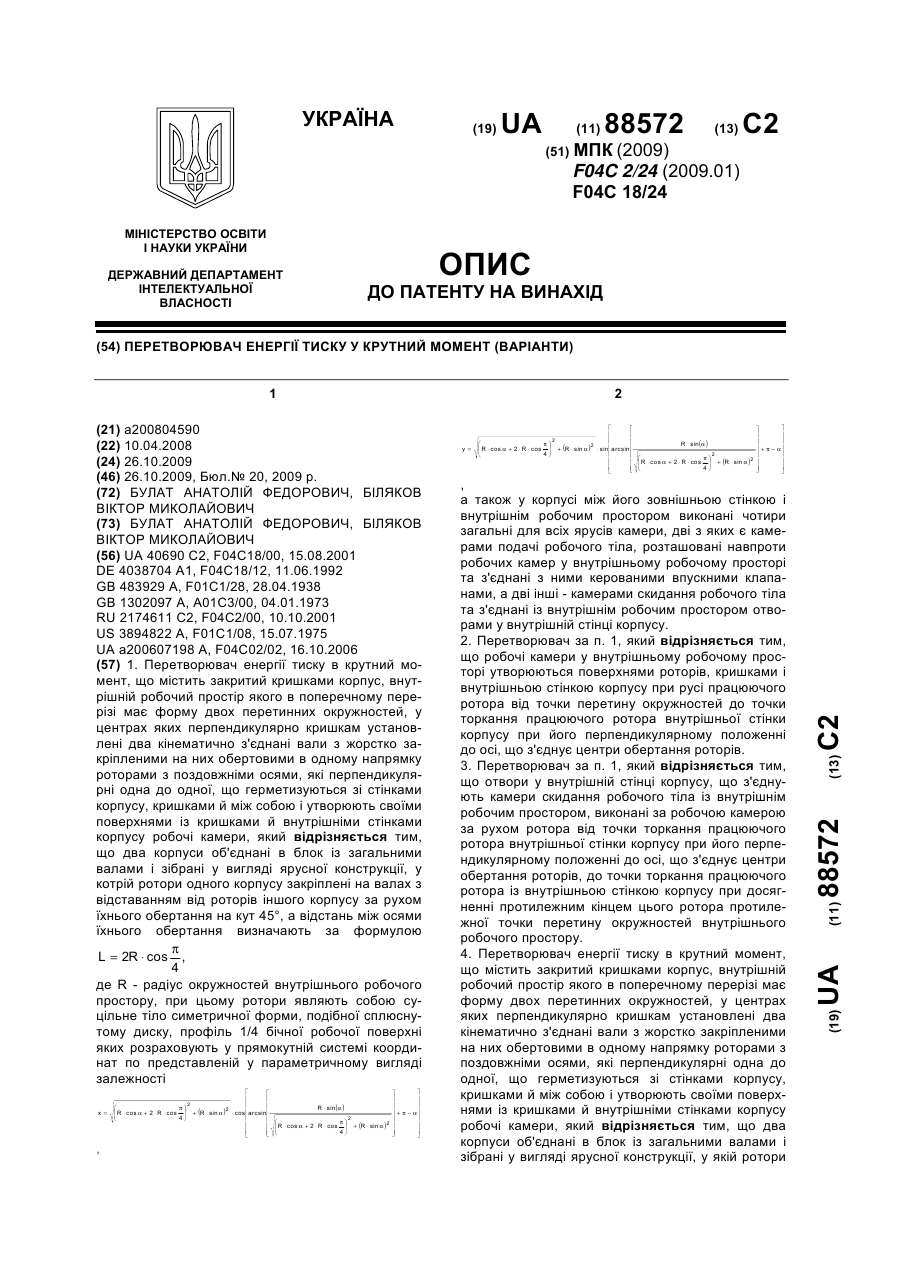
1. Перетворювач енергії тиску в крутний момент, що містить закритий кришками корпус, внутрішній робочий простір якого в поперечному перерізі має форму двох перетинних окружностей, у центрах яких перпендикулярно кришкам установлені два кінематично з'єднані вали з жорстко закріпленими на них обертовими в одному напрямку роторами з поздовжніми осями, які перпендикулярні одна до одної, що герметизуються зі стінками корпусу, кришками й між собою...
Пристрій, що збільшує крутний момент, який розвиває педальний привід
Номер патенту: 20408
Опубліковано: 15.07.1997
Автор: Смертенко Арон Захарович
Мітки: привід, пристрій, розвиває, педальний, момент, збільшує, крутний
Формула / Реферат:
1. Устройство, увеличивающее крутящий момент, развиваемый педальным приводом, содержащее рычаг с педалью, установленный на подшипнике на оси, закрепленной в головке кривошипа, отличающееся тем, что в узел сочленения рычага с кривошипом введено устройство, допускающее вращение рычага относительно головки кривошипа лишь в одном направлении. 2. Устройство по п. 1, отличающееся тем, что устройство, допускающее вращение рычага...
Спосіб перетворення сил інерції в сили тяги
Номер патенту: 78589
Опубліковано: 25.03.2013
Автор: Чугуй Володимир Леонідович
МПК: F03G 3/08
Мітки: сіль, тяги, перетворення, інерції, спосіб, сили
Формула / Реферат:
Спосіб перетворення сил інерції в сили тяги, в якому два тягарці встановлені кожний на своїй індивідуальній кулісі, кожна куліса з'єднана із своїм індивідуальним валом, два вали паралельні між собою, на носку кожного вала встановлена індивідуальна циліндрична зубчата шестірня, зуби двох шестірень зачеплені між собою, в якому обертають один з індивідуальних валів, через зубчаті шестерні обертання передають другому валу, у результаті цього два...
Попередній патент: Спосіб лікування пародонтозу
Наступний патент: Електрофільтр
Випадковий патент: Пристрій для виділення сигналу передостаннього рангу