Перетворювач енергії тиску у крутний момент (варіанти)
Номер патенту: 88572
Опубліковано: 26.10.2009
Автори: Біляков Віктор Миколайович, Булат Анатолій Федорович




Формула / Реферат
1. Перетворювач енергії тиску в крутний момент, що містить закритий кришками корпус, внутрішній робочий простір якого в поперечному перерізі має форму двох перетинних окружностей, у центрах яких перпендикулярно кришкам установлені два кінематично з'єднані вали з жорстко закріпленими на них обертовими в одному напрямку роторами з поздовжніми осями, які перпендикулярні одна до одної, що герметизуються зі стінками корпусу, кришками й між собою і утворюють своїми поверхнями із кришками й внутрішніми стінками корпусу робочі камери, який відрізняється тим, що два корпуси об'єднані в блок із загальними валами і зібрані у вигляді ярусної конструкції, у котрій ротори одного корпусу закріплені на валах з відставанням від роторів іншого корпусу за рухом їхнього обертання на кут 45°, а відстань між осями їхнього обертання визначають за формулою ![]()
де R - радіус окружностей внутрішнього робочого простору, при цьому ротори являють собою суцільне тіло симетричної форми, подібної сплюснутому диску, профіль 1/4 бічної робочої поверхні яких розраховують у прямокутній системі координат по представленій у параметричному вигляді залежності
 ,
,
 ,
,
а також у корпусі між його зовнішньою стінкою і внутрішнім робочим простором виконані чотири загальні для всіх ярусів камери, дві з яких є камерами подачі робочого тіла, розташовані навпроти робочих камер у внутрішньому робочому просторі та з'єднані з ними керованими впускними клапанами, а дві інші - камерами скидання робочого тіла та з'єднані із внутрішнім робочим простором отворами у внутрішній стінці корпусу.
2. Перетворювач за п. 1, який відрізняється тим, що робочі камери у внутрішньому робочому просторі утворюються поверхнями роторів, кришками і внутрішньою стінкою корпусу при русі працюючого ротора від точки перетину окружностей до точки торкання працюючого ротора внутрішньої стінки корпусу при його перпендикулярному положенні до осі, що з'єднує центри обертання роторів.
3. Перетворювач за п. 1, який відрізняється тим, що отвори у внутрішній стінці корпусу, що з'єднують камери скидання робочого тіла із внутрішнім робочим простором, виконані за робочою камерою за рухом ротора від точки торкання працюючого ротора внутрішньої стінки корпусу при його перпендикулярному положенні до осі, що з'єднує центри обертання роторів, до точки торкання працюючого ротора із внутрішньою стінкою корпусу при досягненні протилежним кінцем цього ротора протилежної точки перетину окружностей внутрішнього робочого простору.
4. Перетворювач енергії тиску в крутний момент, що містить закритий кришками корпус, внутрішній робочий простір якого в поперечному перерізі має форму двох перетинних окружностей, у центрах яких перпендикулярно кришкам установлені два кінематично з'єднані вали з жорстко закріпленими на них обертовими в одному напрямку роторами з поздовжніми осями, які перпендикулярні одна до одної, що герметизуються зі стінками корпусу, кришками й між собою і утворюють своїми поверхнями із кришками й внутрішніми стінками корпусу робочі камери, який відрізняється тим, що два корпуси об'єднані в блок із загальними валами і зібрані у вигляді ярусної конструкції, у якій ротори одного корпусу закріплені на валах з відставанням від роторів іншого корпусу за рухом їхнього обертання на кут 45°, а відстань між осями їхнього обертання визначають за формулою
![]() де R - радіус окружностей внутрішнього робочого простору, при цьому ротори являють собою суцільне тіло симетричної форми, подібної сплюснутому диску, профіль 1/4 бічної робочої поверхні яких розраховують у прямокутній системі координат по представленій у параметричному вигляді залежності
де R - радіус окружностей внутрішнього робочого простору, при цьому ротори являють собою суцільне тіло симетричної форми, подібної сплюснутому диску, профіль 1/4 бічної робочої поверхні яких розраховують у прямокутній системі координат по представленій у параметричному вигляді залежності
,
,
а також у корпусі між його зовнішньою стінкою і внутрішнім робочим простором виконані чотири загальні для всіх ярусів камери, дві з яких є камерами подачі робочого тіла, які розташовані навпроти робочих камер у внутрішньому робочому просторі та з'єднані з ними керованими впускними клапанами, а дві інші - камерами скидання робочого тіла та з'єднані із внутрішнім робочим простором отворами у внутрішній стінці корпусу, крім того, на внутрішній стінці корпусу, протилежній камерам подачі робочого тіла, від точки перетину окружностей внутрішнього робочого простору, а також і у кришках корпусу, виконані пази, у яких розміщені заслінка зі штоками.
5. Перетворювач за п. 4, який відрізняється тим, що робочі камери у внутрішньому робочому просторі утворюються поверхнями роторів, заслінками, кришками і внутрішньою стінкою корпусу на її протязі від точки перетину окружностей до точки торкання працюючим ротором внутрішньої стінки корпусу при його перпендикулярному положенні до осі, що з'єднує центри обертання роторів.
6. Перетворювач за п. 4, який відрізняється тим, що на штоках заслінки виконані виступи.
7. Перетворювач за п. 1 або 4, який відрізняється тим, що ярусна конструкція містить два і більше блоків, та у кожному наступному блоці ротори закріплені на валах з відставанням від відповідних роторів попереднього блока за рухом на кут 45°/n, де n - кількість блоків.
8. Перетворювач за п. 1 або 4, який відрізняється тим, що керований впускний клапан, що з'єднує робочу камеру з камерою подачі робочого тіла, виконаний у вигляді засувки, яка має на вільному кінці виступ.
Текст
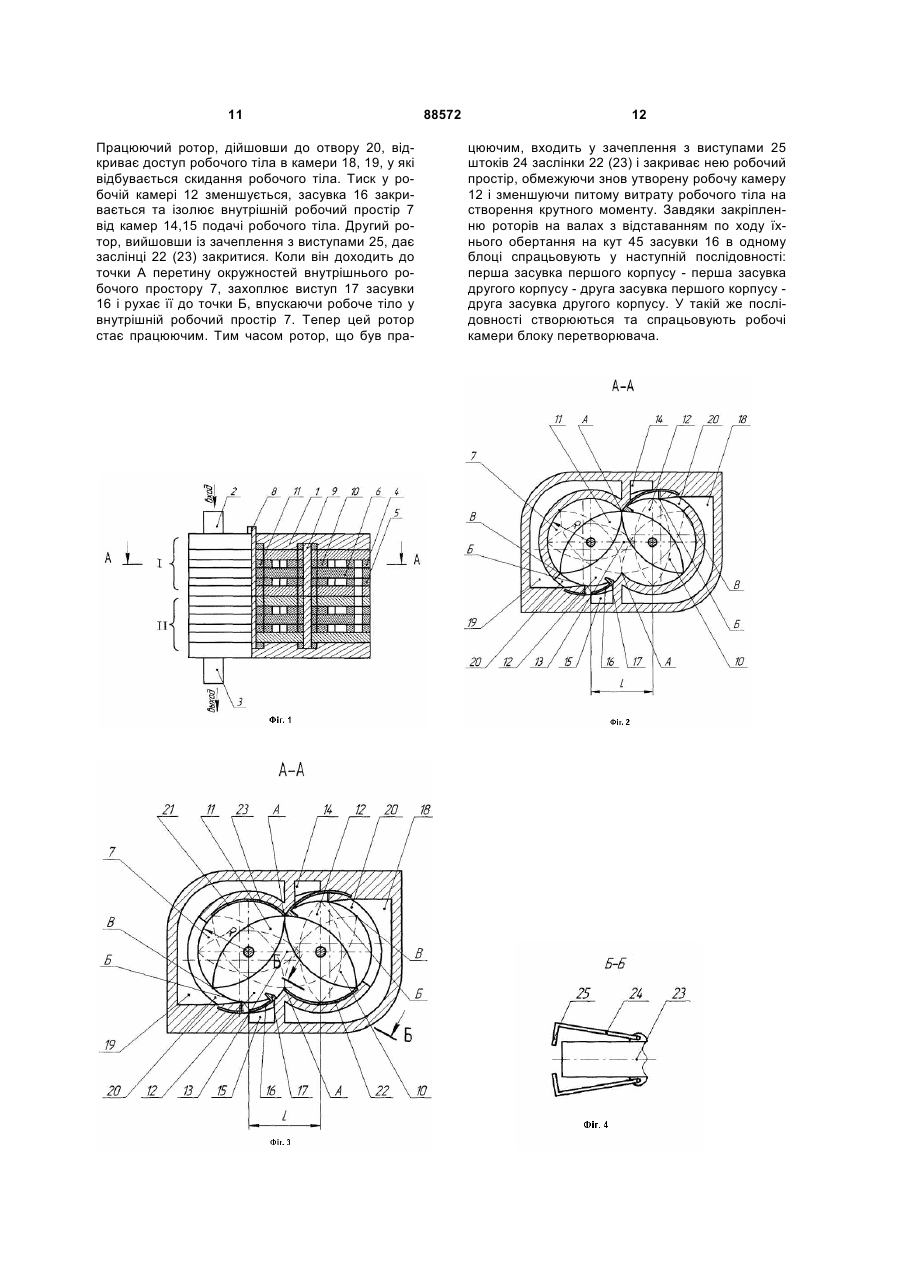
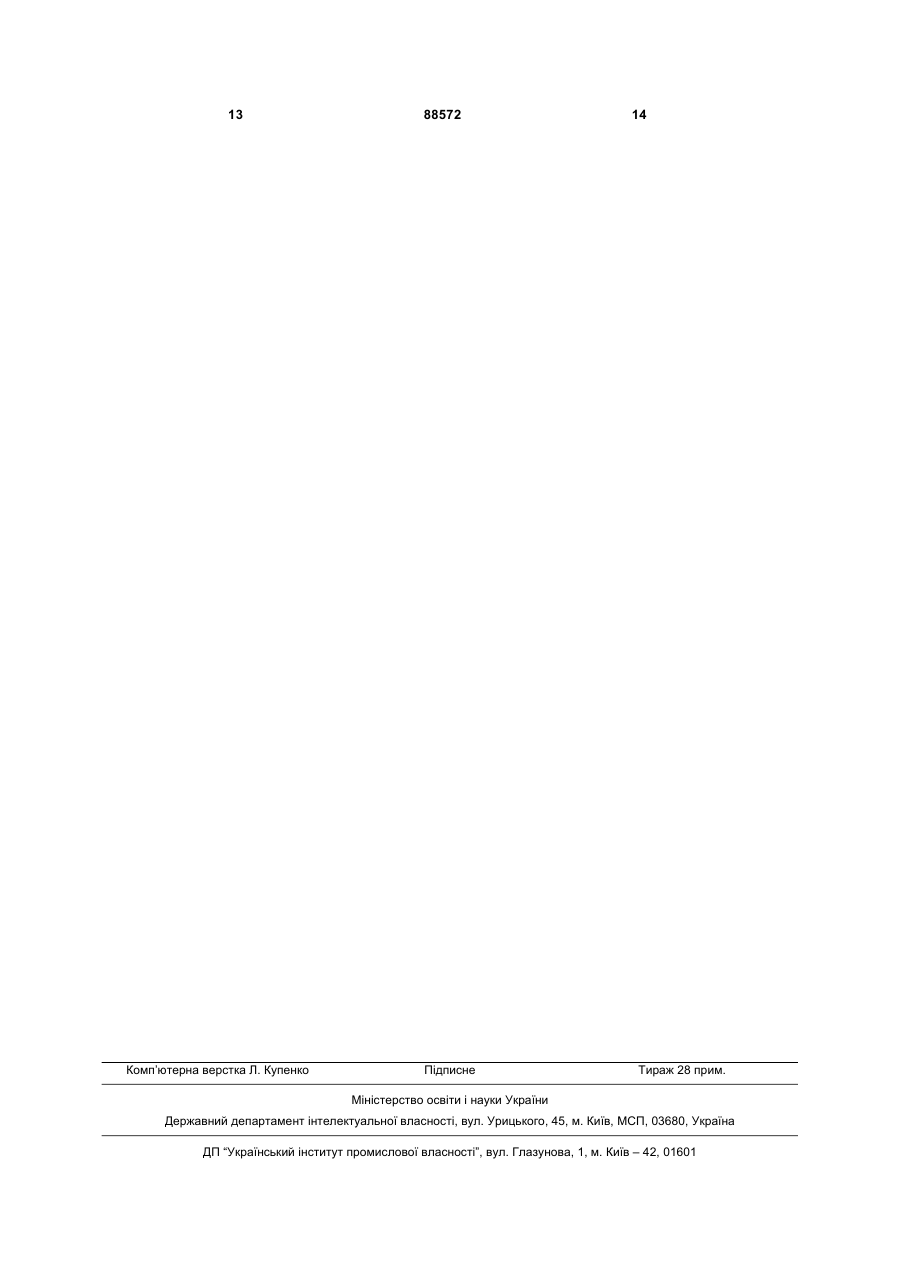
1. Перетворювач енергії тиску в крутний момент, що містить закритий кришками корпус, внутрішній робочий простір якого в поперечному перерізі має форму двох перетинних окружностей, у центрах яких перпендикулярно кришкам установлені два кінематично з'єднані вали з жорстко закріпленими на них обертовими в одному напрямку роторами з поздовжніми осями, які перпендикулярні одна до одної, що герметизуються зі стінками корпусу, кришками й між собою і утворюють своїми поверхнями із кришками й внутрішніми стінками корпусу робочі камери, який відрізняється тим, що два корпуси об'єднані в блок із загальними валами і зібрані у вигляді ярусної конструкції, у котрій ротори одного корпусу закріплені на валах з відставанням від роторів іншого корпусу за рухом їхнього обертання на кут 45°, а відстань між осями їхнього обертання визначають за формулою π L = 2R ⋅ cos , 4 де R - радіус окружностей внутрішнього робочого простору, при цьому ротори являють собою суцільне тіло симетричної форми, подібної сплюснутому диску, профіль 1/4 бічної робочої поверхні яких розраховують у прямокутній системі координат по представленій у параметричному вигляді залежності (19) 1 3 88572 одного корпусу закріплені на валах з відставанням від роторів іншого корпусу за рухом їхнього обертання на кут 45°, а відстань між осями їхнього обертання визначають за формулою π L = 2R ⋅ cos , де R - радіус окружностей внутріш4 нього робочого простору, при цьому ротори являють собою суцільне тіло симетричної форми, подібної сплюснутому диску, профіль 1/4 бічної робочої поверхні яких розраховують у прямокутній системі координат по представленій у параметричному вигляді залежності ⎡ ⎡ ⎢ ⎢ 2 ⎢ ⎢ π⎞ R ⋅ sin(α ) ⎛ (R ⋅ sin α )2 ⋅ cos⎢arcsin⎢ x = ⎜ R ⋅ cos α + 2 ⋅ R ⋅ cos ⎟ + 2 4⎠ ⎢ ⎝ ⎢ ⎛ π ⎢ ⎢ ⎜ R ⋅ cos α + 2 ⋅ R ⋅ cos ⎞ + (R ⋅ sin α )2 ⎟ ⎢ 4⎠ ⎢ ⎝ ⎣ ⎣ ⎤ ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ + π − α⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎦ , ⎡ ⎡ ⎢ ⎢ 2 ⎢ ⎢ π⎞ R ⋅ sin(α ) ⎛ y = ⎜ R ⋅ cos α + 2 ⋅ R ⋅ cos ⎟ + (R ⋅ sin α )2 ⋅ sin⎢arcsin⎢ 2 4⎠ ⎢ ⎝ ⎢ ⎛ π⎞ ⎢ ⎢ ⎜ R ⋅ cos α + 2 ⋅ R ⋅ cos ⎟ + (R ⋅ sin α )2 ⎢ 4⎠ ⎢ ⎝ ⎣ ⎣ ⎤ ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ + π − α⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎦ , а також у корпусі між його зовнішньою стінкою і внутрішнім робочим простором виконані чотири загальні для всіх ярусів камери, дві з яких є камерами подачі робочого тіла, які розташовані навпроти робочих камер у внутрішньому робочому просторі та з'єднані з ними керованими впускними клапанами, а дві інші - камерами скидання робочого тіла та з'єднані із внутрішнім робочим просто Винахід відноситься до машинобудування та може бути використаний для створення крутного моменту на валу машин. Найбільш близьким до винаходу, що заявляється, є роторний насос, що містить закритий кришками корпус, внутрішній робочий простір якого в поперечному перерізі має форму двох перетинних окружностей, у центрах котрих перпендикулярно кришкам установлені два кінематично зв'язаних вали з жорстко закріпленими на них обертовими в одному напрямку роторами з поздовжніми осями перпендикулярними одна одній, що герметизуються із стінками корпусу, кришками й між собою, і утворюють своїми поверхнями із кришками й внутрішніми стінками корпусу робочі камери [див. патент України №40690 С2, МПК7 F04C 18/00, 18/08, опубл. 15.08.2001р.]. При цьому ротори на кінцях мають підпружинені лопатки, які служать ущільненням між роторами та між роторами й корпусом насоса. У зазначеному пристрої, за рахунок зміни геометрії та розмірів робочої камери під час руху роторів, відбувається всмоктування робочого тіла при збільшенні об'єму робочої камери, і, відповідно, його витиснення з певним зусиллям, при зменшенні об'єму робочої камери. Вадами зазначеного пристрою є невисока працездатність і надійність через герметизацію робочої камери підпружиненими лопатками, які при слабкому притисненні до поверхонь не забезпечують необхідний рівень герметизації, що приводить до внутрішніх перетічок робочого тіла й, 4 ром отворами у внутрішній стінці корпусу, крім того, на внутрішній стінці корпусу, протилежній камерам подачі робочого тіла, від точки перетину окружностей внутрішнього робочого простору, а також і у кришках корпусу, виконані пази, у яких розміщені заслінка зі штоками. 5. Перетворювач за п. 4, який відрізняється тим, що робочі камери у внутрішньому робочому просторі утворюються поверхнями роторів, заслінками, кришками і внутрішньою стінкою корпусу на її протязі від точки перетину окружностей до точки торкання працюючим ротором внутрішньої стінки корпусу при його перпендикулярному положенні до осі, що з'єднує центри обертання роторів. 6. Перетворювач за п. 4, який відрізняється тим, що на штоках заслінки виконані виступи. 7. Перетворювач за п. 1 або 4, який відрізняється тим, що ярусна конструкція містить два і більше блоків, та у кожному наступному блоці ротори закріплені на валах з відставанням від відповідних роторів попереднього блока за рухом на кут 45°/n, де n - кількість блоків. 8. Перетворювач за п. 1 або 4, який відрізняється тим, що керований впускний клапан, що з'єднує робочу камеру з камерою подачі робочого тіла, виконаний у вигляді засувки, яка має на вільному кінці виступ. отже, до зниження ККД, а при сильному притисненні в результаті їхнього постійного тертя інтенсивно зношуються та вимагають частої заміни й профілактики. Задачею винаходу є створення перетворювача енергії тиску в крутний момент, у якому за рахунок нової конфігурації роторів і зміни конструкції корпусу досягається поліпшення герметизації робочої камери й зменшення її розмірів до сектора робочого ходу ротора, що приведе до підвищення працездатності, надійності та ККД. Поставлена задача за першим варіантом вирішується тим, що в перетворювачі енергії тиску в крутний момент, що містить закритий кришками корпус, внутрішній робочий простір якого в поперечному перерізі має форму двох перетинних окружностей, у центрах котрих перпендикулярно кришкам установлені два кінематично зв'язаних вали з жорстко закріпленими на них обертовими в одному напрямку роторами з поздовжніми осями перпендикулярними одна одній, що герметизуються із стінками корпусу, кришками й між собою, і утворюють своїми поверхнями із кришками й внутрішніми стінками корпусу робочі камери, відповідно до винаходу два корпуси об'єднані в блок із загальними валами і зібрані у вигляді ярусної конструкції, у котрій ротори одного корпусу закріплені на валах з відставанням від роторів іншого корпусу по ходу їхнього обертання на кут 45° і відстань між осями їхнього обертання визначають за формулою 5 88572 π , 4 де R - радіус окружностей внутрішнього робочого простору, при цьому ротори являють собою цільне тіло симетричної форми, подібної сплюснуL = 2R ⋅ cos 2 π⎞ ⎛ x = ⎜ R ⋅ cos α + 2 ⋅ R ⋅ cos ⎟ + (R ⋅ sin α )2 4⎠ ⎝ 2 π⎞ ⎛ y = ⎜ R ⋅ cos α + 2 ⋅ R ⋅ cos ⎟ + (R ⋅ sin α )2 4⎠ ⎝ 2 2 π⎞ ⎛ x = ⎜ R ⋅ cos α + 2 ⋅ R ⋅ cos ⎟ + (R ⋅ sin α )2 4⎠ ⎝ тому диску, профіль 1/4 бічної робочої поверхні яких розраховують у прямокутній системі координат по представленій у параметричному вигляді залежності ⎡ ⎡ ⎢ ⎢ ⎢ ⎢ R ⋅ sin(α ) ⎢arcsin ⎢ ⋅ cos 2 ⎢ ⎢ ⎛ π ⎢ ⎢ ⎜ R ⋅ cos α + 2 ⋅ R ⋅ cos ⎞ + (R ⋅ sin α )2 ⎟ ⎢ 4⎠ ⎢ ⎝ ⎣ ⎣ ⎤ ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ + π − α⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎦ ⎡ ⎡ ⎢ ⎢ ⎢ ⎢ R ⋅ sin(α ) ⋅ sin ⎢arcsin ⎢ 2 ⎢ ⎢ ⎛ π ⎢ ⎢ ⎜ R ⋅ cos α + 2 ⋅ R ⋅ cos ⎞ + (R ⋅ sin α )2 ⎟ ⎢ 4⎠ ⎢ ⎝ ⎣ ⎣ а також у корпусі між його зовнішньою стінкою і внутрішнім робочим простором виконані чотири загальні для всіх ярусів камери, дві з яких є камерами подачі робочого тіла, розташовані напроти робочих камер у внутрішньому робочому просторі та з'єднані з ними керованими впускними клапанами, а дві інші - камерами скидання робочого тіла та з'єднані із внутрішнім робочим простором отворами у внутрішній стінці корпусу. При цьому робочі камери у внутрішньому робочому просторі утворюються поверхнями роторів, кришками і внутрішньою стінкою корпусу при русі працюючого ротора від точки перетину окружностей до точки торкання працюючого ротора внутрішньої стінки корпусу при його перпендикулярному положенні до осі, що з'єднує центри обертання роторів. А також отвори у внутрішній стінці корпусу, що з'єднують камери скидання робочого тіла із внутрішнім робочим простором, виконані слідом за робочою камерою по ходу руху ротора від точки торкання працюючого ротора внутрішньої стінки корпусу при його перпендикулярному положенні до осі, що з'єднує центри обертання роторів, до точки торкання працюючого ротора із внутрішньою стінкою корпусу при досягненні протилежним кінцем цього ротора протилежної точки перетину окружностей внутрішнього робочого простору. За другим варіантом поставлена задача вирішується тим, що в перетворювачі енергії тиску в π⎞ ⎛ y = ⎜ R ⋅ cos α + 2 ⋅ R ⋅ cos ⎟ + (R ⋅ sin α )2 4⎠ ⎝ 6 ⎤ ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ + π − α⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎦ крутний момент, що містить закритий кришками корпус, внутрішній робочий простір якого в поперечному перерізі має форму двох перетинних окружностей, у центрах котрих перпендикулярно кришкам установлені два кінематично зв'язаних вали з жорстко закріпленими на них обертовими в одному напрямку роторами з поздовжніми осями перпендикулярними одна одній, що герметизуються із стінками корпусу, кришками й між собою, і утворюють своїми поверхнями із кришками йвнутрішніми стінками корпусу робочі камери, відповідно до винаходу два корпуси об'єднані в блок із загальними валами і зібрані у вигляді ярусної конструкції, у котрій ротори одного корпусу закріплені на валах з відставанням від роторів іншого корпусу по ходу їхнього обертання на кут 45° і відстань між осями їхнього обертання визначають за формулою π L = 2R ⋅ cos , 4 де R - радіус окружностей внутрішнього робочого простору, при цьому ротори являють собою цільне тіло симетричної форми, подібної сплюснутому диску, профіль 1/4 бічної робочої поверхні яких розраховують у прямокутній системі координат по представленій у параметричному вигляді залежності ⎡ ⎡ ⎢ ⎢ ⎢ ⎢ R ⋅ sin(α ) ⋅ sin⎢arcsin⎢ 2 ⎢ ⎢ ⎛ π ⎢ ⎢ ⎜ R ⋅ cos α + 2 ⋅ R ⋅ cos ⎞ + (R ⋅ sin α )2 ⎟ ⎢ 4⎠ ⎢ ⎝ ⎣ ⎣ ⎤ ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ + π − α⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎦ ⎡ ⎡ ⎢ ⎢ ⎢ ⎢ R ⋅ sin(α ) ⋅ cos ⎢arcsin⎢ 2 ⎢ ⎢ ⎛ π ⎢ ⎢ ⎜ R ⋅ cos α + 2 ⋅ R ⋅ cos ⎞ + (R ⋅ sin α )2 ⎟ ⎢ 4⎠ ⎢ ⎝ ⎣ ⎣ ⎤ ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ + π − α⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎦ 7 а також у корпусі між його зовнішньою стінкою і внутрішнім робочим простором виконані чотири загальні для всіх ярусів камери, дві з яких є камерами подачі робочого тіла, розташовані напроти робочих камер у внутрішньому робочому просторі та з'єднані з ними керованими впускними клапанами, а дві інші - камерами скидання робочого тіла та з'єднані із внутрішнім робочим простором отворами у внутрішній стінці корпусу, і, крім того, на внутрішній стінці корпусу, протилежної камерам подачі робочого тіла, від точки перетину окружностей внутрішнього робочого простору, а також і у кришках корпусу, виконані пази, у яких розміщені заслінка зі штоками. При цьому робочі камери у внутрішньому робочому просторі утворюються поверхнями роторів, заслінками, кришками і внутрішньою стінкою корпусу на її протязі від точки перетину окружностей до точки торкання працюючим ротором внутрішньої стінки корпусу при його перпендикулярному положенні до осі, що з'єднує центри обертання роторів. А на штоках заслінки виконані виступи. І для обох варіантів: - ярусна конструкція може містити два і більше блоків та у кожному наступному блоці ротори закріплені на валах з відставанням від відповідних роторів попереднього блоку по ходу руху на кут 45°/n, де n - кількість блоків; - керований впускний клапан, що з'єднує робочу камеру з камерою подачі робочого тіла, виконаний у вигляді засувки, яка має на вільному кінці виступ. Завдяки об'єднанню двох корпусів у блок із загальними валами та зборці їх у вигляді ярусної конструкції, в якій ротори одного корпусу закріплені на валах з відставанням від роторів іншого корпусу по ходу їхнього обертання на кут 45°, а також визначенню відстані між осями їхнього обертання за заявленою формулою забезпечується плавність і безперервність передачі навантаження на робочий вал перетворювача, тим самим досягають підвищення ККД і круглого моменту. Ротори являють собою цільне тіло симетричної форми, подібної сплющеному диску, профіль 1/4 бічної робочої поверхні котрих виконаний відповідно до кривій, форма якої розраховується за заявленою залежністю. Така форма профілів роторів забезпечує плавність їхнього обертання і герметизацію робочої камери без необхідності застосування підпружинених лопаток, що сприяє підвищенню працездатності та надійності перетворювача. Виконання загальних для всіх ярусів камер подачі робочого тіла, розташованих навпроти робочих камер у внутрішньому робочому просторі й з'єднаних з ними керованими впускними клапанами, і камер скидання робочого тіла, з'єднаних із внутрішнім робочим простором отворами у внутрішній стінці корпусу, дозволяє спростити 88572 8 конструкцію елементів подачі й скидання робочого тіла та забезпечити його безперервний потік через перетворювач, у якому здійснюється відбір його енергії для обертання робочого вала. Ярусна конструкція може містити два та більше блоків і у кожному наступному блоці ротори закріплені на валах з відставанням від відповідних роторів попереднього блоку по ходу руху на кут 450/n, де n - кількість блоків, що дозволить збільшити потужність перетворювача та плавність передачі навантаження на робочий вал. Для значного збільшення ККД перетворювач за другим варіантом на внутрішній стінці корпусу, протилежної камерам подачі робочого тіла, від точки перетину окружностей внутрішнього робочого простору, а також і у кришках корпусу, виконані пази, в яких розміщені заслінка зі штоками, завдяки котрій додатково обмежується робоча камера у внутрішньому робочому просторі та зменшується питома витрата робочого тіла на створення крутного моменту. Технічна сутність винаходу, що заявляється, пояснюється графічною частиною: на Фіг.1 представлений перетворювач, що містить два блоки, частковий поздовжній вертикальний розріз ; на Фіг.2 - вигляд по А-А на Фіг.1 за першим варіантом; на Фіг.3 - вигляд по А-А на Фіг.1 за другим варіантом; на Фіг.4 - вигляд по Б-Б на Фіг.3 Перетворювач енергії тиску в крутний момент містить кришки 1 із вхідним 2 і вихідним 3 патрубками для робочого тіла, два корпуси 4, 5, із кришками 6 між ними. Корпусу 4, 5 об'єднані в блоки І та II, які зібрані у вигляді ярусної конструкції. Внутрішній робочий простір 7 корпусів 4, 5 у поперечному перерізі має форму двох перетинних окружностей, у центрах котрих, перпендикулярно кришкам 1, 6, встановлені два кінематично зв'язаних вали 8, 9 з жорстко закріпленими на них обертовими в одному напрямку роторами 10, 11 з перпендикулярними один одному поздовжніми осями. Ротори 10, 11 корпусу 5 закріплені на валах 8, 9 з відставанням від роторів 10, 11 корпусу 4 по ходу їхнього обертання на кут 45° і відстань L між осями їхнього обертання визначають за формулою π L = 2R ⋅ cos , 4 де R - радіус окружностей внутрішнього робочого простору 7. І в кожному наступному блоці ротори закріплені на валах з відставанням від відповідних роторів попереднього блоку по ходу руху на кут 45°/n, де n - кількість блоків. Ротори 10, 11 являють собою цільне тіло симетричної форми, подібної сплюснутому диску, профіль 1/4 бічної робочої поверхні яких розраховують у прямокутній системі координат по представленій у параметричному вигляді залежності 9 88572 2 π⎞ ⎛ y = ⎜ R ⋅ cos α + 2 ⋅ R ⋅ cos ⎟ + (R ⋅ sin α )2 4⎠ ⎝ 2 π⎞ ⎛ x = ⎜ R ⋅ cos α + 2 ⋅ R ⋅ cos ⎟ + (R ⋅ sin α )2 4⎠ ⎝ 10 ⎡ ⎡ ⎢ ⎢ ⎢ ⎢ R ⋅ sin(α ) ⋅ sin ⎢arcsin ⎢ 2 ⎢ ⎢ ⎛ π ⎢ ⎢ ⎜ R ⋅ cos α + 2 ⋅ R ⋅ cos ⎞ + (R ⋅ sin α )2 ⎟ ⎢ 4⎠ ⎢ ⎝ ⎣ ⎣ ⎤ ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ + π − α⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎦ ⎡ ⎡ ⎢ ⎢ ⎢ ⎢ R ⋅ sin(α ) ⋅ cos ⎢arcsin ⎢ 2 ⎢ ⎢ ⎛ π ⎢ ⎢ ⎜ R ⋅ cos α + 2 ⋅ R ⋅ cos ⎞ + (R ⋅ sin α )2 ⎟ ⎢ 4⎠ ⎢ ⎝ ⎣ ⎣ завдяки чому ротори 10, 11 надійно герметизуються зі стінками корпусів 4, 5, кришками 6 і між собою та утворюють своїми поверхнями із кришками 6 і внутрішніми стінками корпусів 4, 5 робочі камери 12. При цьому робочі камери 12 перетворювача за першим варіантом утворюються при русі працюючого ротора від точки А перетину окружностей внутрішнього робочого простору 7 до точки Б торкання ним внутрішньої стінки корпусів 4, 5 при його перпендикулярному положенні до осі 13, що з'єднує центри обертання роторів 10, 11. У корпусах 4, 5 між їхньою зовнішньою стінкою та внутрішнім робочим простором 7 виконані чотири загальні для всіх ярусів камери. Дві з них камери 14, 15 подачі робочого тіла - розташовані напроти робочих камер 12 у внутрішньому робочому просторі 7 і з'єднані з ними керованими впускними клапанами, які виконані у вигляді засувки 16, що має на вільному кінці виступ 17. Дві інші камери 18, 19 скидання робочого тіла - з'єднані із внутрішнім робочим простором 7 отворами 20 у внутрішній стінці корпусів 4, 5. При цьому, за першим варіантом (Фіг.2), отвори 20 виконані слідом за робочою камерою по ходу руху ротора від точки Б торкання працюючого ротора внутрішньої стінки корпусу при його перпендикулярному положенні до осі 13, що з'єднує центри обертання роторів 10, 11, до точки В торкання працюючого ротора із внутрішньою стінкою корпусу при досягненні протилежним кінцем цього ротора протилежної точки А перетину окружностей внутрішнього робочого простору 7. Крім того, у другому варіанті перетворювача (Фіг.3, 4), на внутрішній стінці корпусу 4, 5, протилежної камерам 14, 15 подачі робочого тіла, від точки А перетину окружностей внутрішнього робочого простору 7, а також у кришках 6 корпусів 4, 5 (не показано), виконані пази 21, у яких розміщені заслінки 22, 23 зі штоками 24 з виступами 25. І робочі камери 12 у внутрішньому робочому просторі 7 утворюються поверхнями роторів 10, 11, заслінок 22 або 23, кришками 6 і внутрішньою стінкою корпусу на її протязі від точки А перетину окружностей до точки Б торкання працюючим ротором внутрішньої стінки корпусів 4, 5 при його перпендикулярному положенні до осі 13, що з'єднує центри обертання роторів 10, 11. Перетворювач за першим варіантом працює наступним чином. ⎤ ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ + π − α⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎦ Робоче тіло подають через вхідний патрубок 2 у камери 14, 15 подачі робочого тіла. Звідки робоче тіло під тиском надходить у внутрішній робочий простір 7 кожного з корпусів, у якому засувка 16 перебуває у відкритому положенні, а один з роторів - у положенні між точками А та Б, і тим самим утворюється робоча камера 12. Ротор, що сприймає в цей момент навантаження - працюючий - під дією тиску робочого тіла починає рухатися, надаючи руху й другому ротору корпусу. Працюючий ротор, дійшовши до отвору 20, відкриває доступ робочого тіла в камери 18, 19, у які відбувається скидання робочого тіла с подальшим виводом його з перетворювача через вихідний патрубок 3. Тиск у робочій камері 12 зменшується, засувка 16 закривається та ізолює внутрішній робочий простір 7 від камер 14, 15 подачі робочого тіла. Другий ротор, дійшовши до точки А перетину окружностей внутрішнього робочого простору 7, захоплює виступ 17 засувки 16 і рухає її до точки Б, утворюючи нову робочу камеру 12 і впускаючи робоче тіло у внутрішній робочий простір 7. Таким чином, цей ротор стає працюючим. Завдяки закріпленню роторів на валах з відставанням по ходу їхнього обертання на кут 45° засувки 16 в одному блоці спрацьовують у наступній послідовності: перша засувка першого корпусу - перша засувка другого корпусу - друга засувка першого корпусу - друга засувка другого корпусу. У такій же послідовності створюються та спрацьовують робочі камери блоку перетворювача. Перетворювач працює без зупинки, плавно, з безперервною подачею навантаження на робочий вал. ККД зазначеного перетворювача досягає величини 30-40%. Ще більш значного збільшення ККД (до 83%) досягають при роботі перетворювача за другим варіантом. Робоче тіло подають через вхідний 2 патрубок у камери 14, 15 подачі робочого тіла. Звідки робоче тіло під тиском надходить у внутрішній робочий простір 7 кожного з корпусів, у якому засувка 16 перебуває у відкритому положенні, один з роторів - у положенні між точками А та Б, а другий - у зачепленні з виступами 25 штоків 24 заслінки 22, 23, і утворюється робоча камера 12, обмежена поверхнями роторів, заслінкою, кришками й внутрішньою стінкою корпусу. Ротор, що сприймає в цей момент навантаження - працюючий - під дією тиску робочого тіла починає рухатися, надаючи руху й другому ротору корпусу. 11 Працюючий ротор, дійшовши до отвору 20, відкриває доступ робочого тіла в камери 18, 19, у які відбувається скидання робочого тіла. Тиск у робочій камері 12 зменшується, засувка 16 закривається та ізолює внутрішній робочий простір 7 від камер 14,15 подачі робочого тіла. Другий ротор, вийшовши із зачеплення з виступами 25, дає заслінці 22 (23) закритися. Коли він доходить до точки А перетину окружностей внутрішнього робочого простору 7, захоплює виступ 17 засувки 16 і рухає її до точки Б, впускаючи робоче тіло у внутрішній робочий простір 7. Тепер цей ротор стає працюючим. Тим часом ротор, що був пра 88572 12 цюючим, входить у зачеплення з виступами 25 штоків 24 заслінки 22 (23) і закриває нею робочий простір, обмежуючи знов утворену робочу камеру 12 і зменшуючи питому витрату робочого тіла на створення крутного моменту. Завдяки закріпленню роторів на валах з відставанням по ходу їхнього обертання на кут 45 засувки 16 в одному блоці спрацьовують у наступній послідовності: перша засувка першого корпусу - перша засувка другого корпусу - друга засувка першого корпусу друга засувка другого корпусу. У такій же послідовності створюються та спрацьовують робочі камери блоку перетворювача. 13 Комп’ютерна верстка Л. Купенко 88572 Підписне 14 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюConverter of pressure energy to torque (variants)
Автори англійськоюBulat Anatolii Fedorovych, Biliakov Viktor Mykolaiovych
Назва патенту російськоюПреобразователь энергии давления в крутящий момент (варианты)
Автори російськоюБулат Анатолий Федорович, Биляков Виктор Николаевич
МПК / Мітки
МПК: F04C 18/24, F04C 2/24
Мітки: перетворювач, момент, крутний, тиску, варіанти, енергії
Код посилання
<a href="https://ua.patents.su/7-88572-peretvoryuvach-energi-tisku-u-krutnijj-moment-varianti.html" target="_blank" rel="follow" title="База патентів України">Перетворювач енергії тиску у крутний момент (варіанти)</a>
Спосіб перетворення сил інерції в крутний момент
Номер патенту: 45581
Опубліковано: 15.04.2002
Автор: Чугуй Володимир Леонідович
МПК: F03G 3/00
Мітки: перетворення, крутний, інерції, спосіб, момент, сіль
Формула / Реферат:
Спосіб перетворення сил інерції в крутний момент, в якому отримують сили інерції з середніми за період руху кривошипно-коромислового механізму векторними величинами, більшими нуля, для чого здійснюють обертання кривошипного вала навколо осі корінних шийок кривошипного вала, разом зі зворотно-кутовим поворотом шатуна, кривошипна голівка якого досаджена на шатунну шийку кривошипного вала, а коромислова голівка якого посаджена на шатунний...
Пристрій, що збільшує крутний момент, який розвиває педальний привід
Номер патенту: 20408
Опубліковано: 15.07.1997
Автор: Смертенко Арон Захарович
Мітки: крутний, збільшує, привід, пристрій, момент, розвиває, педальний
Формула / Реферат:
1. Устройство, увеличивающее крутящий момент, развиваемый педальным приводом, содержащее рычаг с педалью, установленный на подшипнике на оси, закрепленной в головке кривошипа, отличающееся тем, что в узел сочленения рычага с кривошипом введено устройство, допускающее вращение рычага относительно головки кривошипа лишь в одном направлении. 2. Устройство по п. 1, отличающееся тем, что устройство, допускающее вращение рычага...
Електрохімічний перетворювач енергії (варіанти)
Номер патенту: 69509
Опубліковано: 15.09.2004
Автори: Васільєв Сєргєй Владіміровіч, Дзензерський Деніс Вікторович, Дзензерський Віктор Олександрович, Підлубний Василь Іванович, Касян Сергій Григорович
МПК: B01D 61/00, H01M 10/00, C25B 5/00
Мітки: електрохімічний, перетворювач, енергії, варіанти
Формула / Реферат:
1. Електрохімічний перетворювач енергії, що включає діелектричний корпус з позитивними і негативними електродами, отворами, штуцерами і колекторами для підведення та відводу електролітів, який відрізняється тим, що позитивний і негативний електроди виконані у вигляді струмопровідних проникних для водню мембран, між електродами розташовані порожнини для лужного, сольового і кислотного проточних електролітів, які послідовно чергуються, при...
Оптоелектронний перетворювач тиску (варіанти)
Номер патенту: 68538
Опубліковано: 16.08.2004
Автори: Вікулін Іван Михайлович, Мінгалев Володимир Олександрович
МПК: G01L 11/00
Мітки: оптоелектронний, перетворювач, тиску, варіанти
Формула / Реферат:
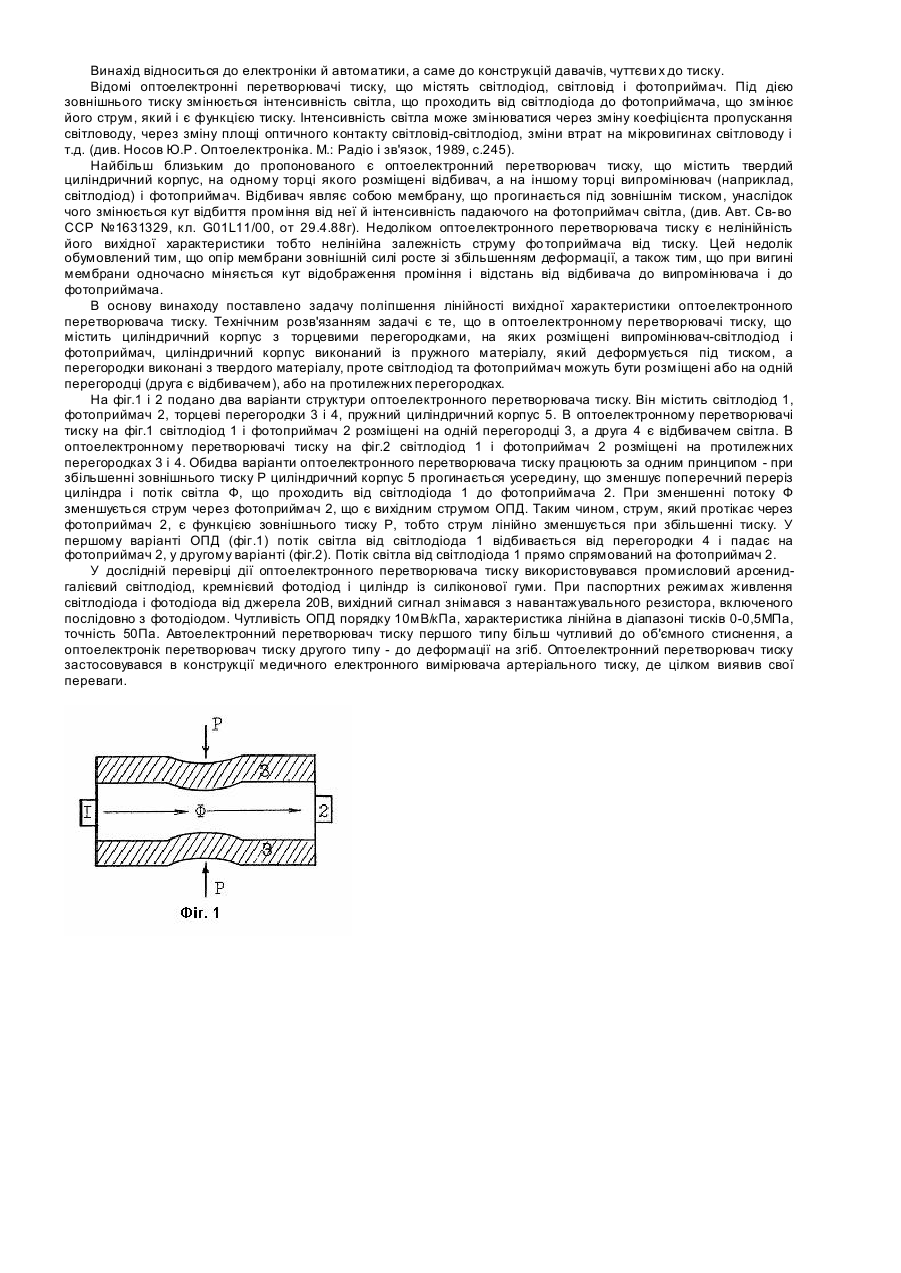
1. Оптоелектронний перетворювач тиску, що містить циліндричний корпус з торцевою перегородкою у вигляді відбивача, фотоприймач і випромінювач (наприклад світлодіод), розташовані напроти відбивача, який відрізняється тим, що циліндричний корпус виконаний із пружного матеріалу, який деформується під тиском, а відбивач - із твердого матеріалу.2. Оптоелектронний перетворювач тиску, що містить циліндричний корпус з торцевими перегородками,...
Асинхронний перетворювач, що обертається (варіанти), генераторний пристрій (варіанти) і спосіб з`єднання електромереж змінного струму (варіанти)
Номер патенту: 42867
Опубліковано: 15.11.2001
Автори: Леійон Матс, Фромм Удо, Сассе Крістіан, Шютте Торстен
МПК: H02J 17/00, H02K 47/00
Мітки: спосіб, з'єднання, варіанти, змінного, обертається, електромереж, асинхронний, генераторний, пристрій, струму, перетворювач
Формула / Реферат:
1. Асинхронний перетворювач, що обертається, призначений для з'єднання електромереж змінного струму з однаковими або різними частотами, який має у складі перший статор, з'єднаний з першою електромережею змінного струму першої частоти f1, і другий статор, з'єднаний з другою електромережею змінного струму другої частоти f2, який відрізняється тим, що має ротор, який обертається в залежності від першої і другої частот f1 і f2, і тим, що кожний з...
Попередній патент: Інгібітор корозії металів для захисних композицій
Наступний патент: Спосіб виготовлення холоднотягнутої прецизійної сталевої труби
Випадковий патент: Дріт для присадки магнію у розплави на основі заліза