Кран-маніпулятор
Номер патенту: 91468
Опубліковано: 10.07.2014
Автори: Шайтанов Олександр Ігорович, Леоненко Кирило Олексійович, Шаленний Василь Тимофійович
Формула / Реферат
Кран-маніпулятор, що складається із основи, нерухомої колони на ній, горизонтальної консольно-поворотної стріли, фрикційного захоплювача із шарнірно-важільним механізмом та механізму підйому фрикційного захоплювача, який змонтовано на кінцевому ланцюгу стріли, який відрізняється тим, що механізм підйому виконано у вигляді лебідки, а захоплювач підвішений на її гаку.
Текст
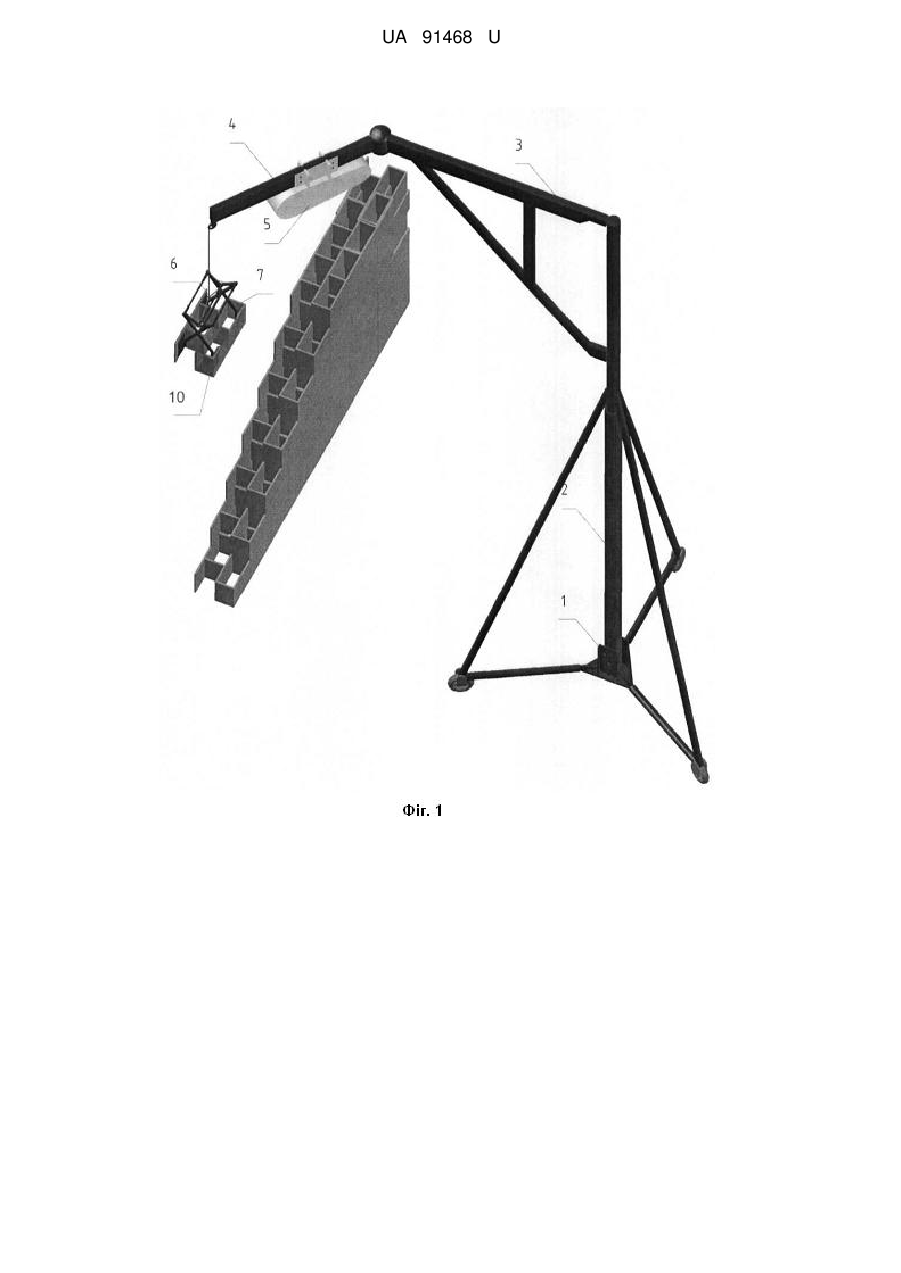
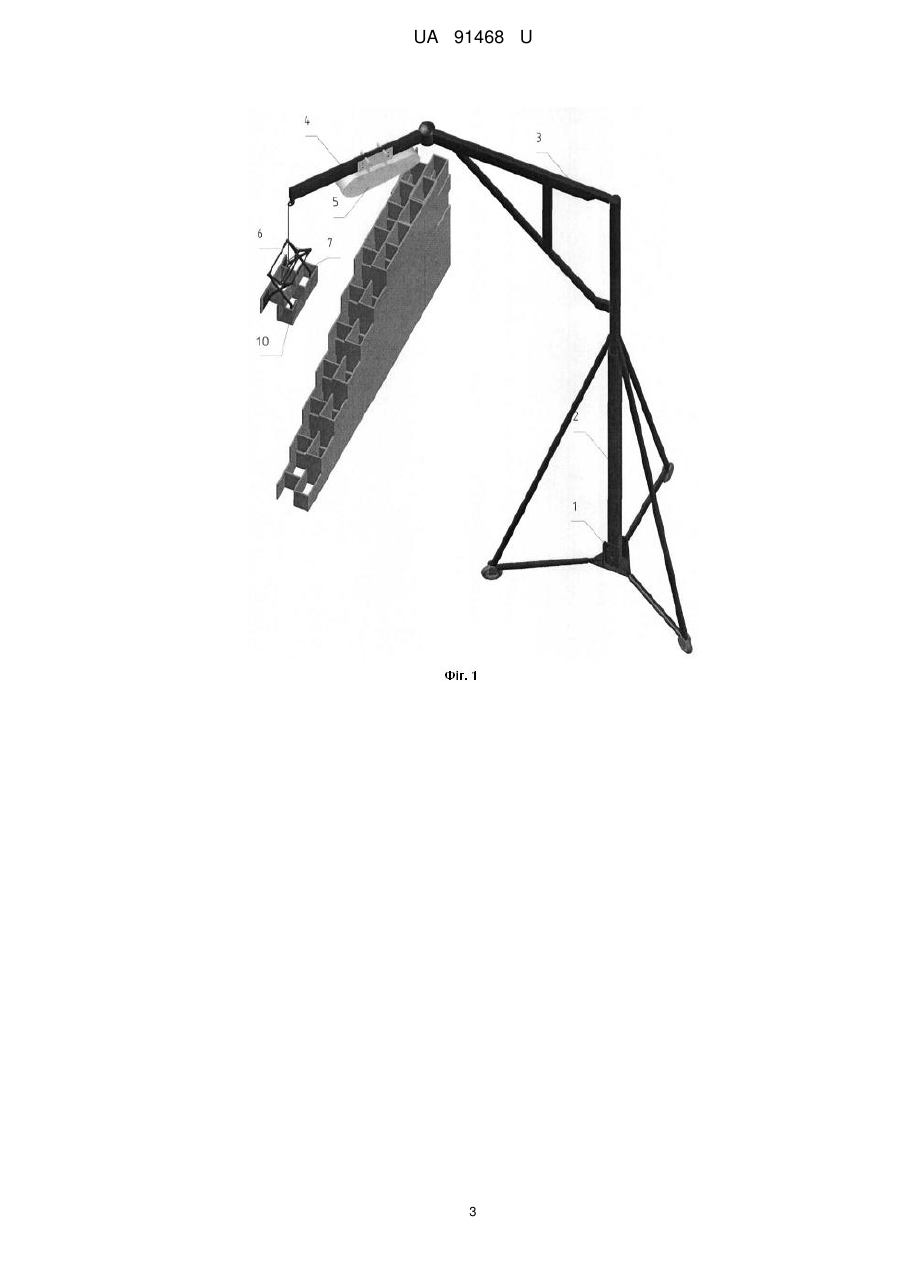
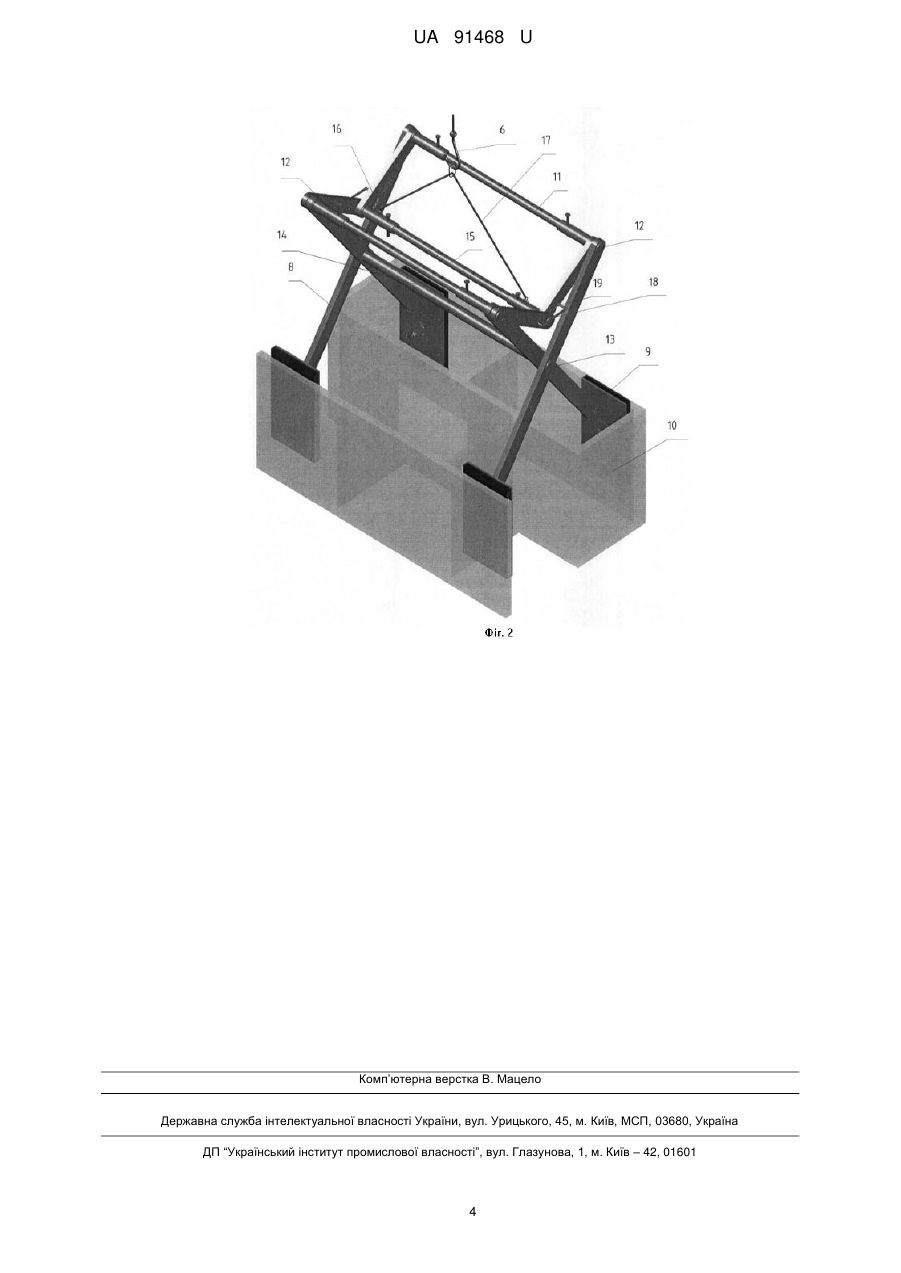
Реферат: Кран-маніпулятор складається із основи, нерухомої колони на ній, горизонтальної консольноповоротної стріли, фрикційного захоплювача із шарнірно-важільним механізмом та механізму підйому фрикційного захоплювача, який змонтовано на кінцевому ланцюгу стріли. Механізм підйому виконано у вигляді лебідки, а захоплювач підвішений на її гаку. UA 91468 U (54) КРАН-МАНІПУЛЯТОР UA 91468 U UA 91468 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить переважно до галузі будівництва і може бути використана при зведенні конструкцій стін із каменів та дрібних блоків переважно з вертикальними пустотами. Відоме обладнання для механізації мурування стін, яке включає несущу конструкцію у вигляді колони та горизонтально поворотної стріли, на яких змонтовано підйомне пристосування для подавання цегли та розчину у зону укладання (авторське свідоцтво SU на винахід №1775540, МПК E04G21/16, опубл. 15.11.1992, [1]). Реалізація технології із таким обладнанням не виключає ручних операцій по прийманню та укладанню цегли чи каменів безпосередньо у конструкцію стіни. Найближчим аналогом до запропонованої корисної моделі є маніпулятор, що складається із основи, нерухомої колони на ній, горизонтальної консольно-поворотної стріли, захоплювача із шарнірно-важільним механізмом, який змонтовано на кінцевому ланцюгу стріли та механізму підйому захоплювача (авторське свідоцтво SU на винахід № 1283087, МПК B25J11/00, опубл. 15.01.1987, [2]). Механізм підйому-опускання захоплювача виконано із пневматичним циліндром і дозволяє захоплювати вантаж назовні з його бокових сторін. Тобто, утримання вантажу захоплювачем здійснюється із використанням і сил тертя, а такі захоплювачі називають фрикційними. Однак висота переміщення захопленого вантажу (якщо одночасно не підіймати та опускати стрілу за рахунок іншого пневматичного приводу всієї консольно-поворотної стріли) досить обмежена і не достатня для виконання кам'яних робіт. Підіймання ж кожного разу по колоні разом з вантажем всієї консольно-поворотної стріли збільшує тривалість і енерговитрати технологічного циклу укладання каменю і все одно може бути недостатнім, наприклад, якщо камені брати із рівня землі, а кран-маніпулятор розташовано на міжповерховому перекритті. Окрім цього, передбачене конструкцією маніпулятора фрикційне захоплення вантажу зовні з бокових його сторін також не дозволяє укладання наступного каменю (вантажу) рядом із раніше укладеним. Тобто технологічні можливості маніпулятора-найближчого аналогу мають обмеження, що не дозволяють продуктивно використати його при зведенні конструкцій із стінових каменів, а особливо, дрібних блоків із вертикальними пустотами. В основу корисної моделі поставлена задача удосконалення обладнання за найближчим аналогом із досягненням технічного результату - подальшого розширення технологічних можливостей на виробництво кам'яних конструкцій із стінових каменів, а особливо дрібних блоків із вертикальними пустотами. Поставлена задача вирішується тим, що запропоновано удосконалений кран-маніпулятор, що складається із основи, нерухомої колони на ній, горизонтальної консольно-поворотної стріли, фрикційного захоплювача із шарнірно-важільним механізмом та механізму підйому фрикційного захоплювача, який змонтовано на кінцевому ланцюгу стріли. Удосконалення полягає в тому, що механізм підйому виконано у вигляді лебідки, а захоплювач підвішений на її гаку. Корисна модель дозволяє розширити технологічні можливості на виробництво кам'яних робіт із мурування стін із стінових каменів, а особливо, дрібних блоків із вертикальними пустотами. Адже стає можливим повністю механізувати найбільш важкі для робітників операції із захоплення, підйому та опускання кожного каменю у потрібному місці, на попередньо вручну влаштований шар розчину чи клею. Істотними ознаками пристрою, який заявляється, які збігаються із найближчим аналогом, є наступні: - кран-маніпулятор складається із основи, нерухомої колони на ній та горизонтальної консольно-поворотної стріли; - фрикційний захоплювач із шарнірно-важільним механізмом; - механізм підйому фрикційного захоплювача. - механізм підйому фрикційного захоплювача змонтовано на кінцевому ланцюгу стріли. Відмінними від найближчого аналога істотними ознаками пристрою, який заявляється, є наступні: - механізм підйому виконано у вигляді лебідки, - захоплювач підвішений на її гаку. Можливість здійснення корисної моделі, що заявляється, підтверджується нижченаведеним описом її практичної реалізації та ілюструється кресленнями, де на Фіг. 1 зображено загальний просторовий вигляд крана-маніпулятора; на Фіг. 2 - теж, у просторову зображенні, деталізовано фрикційний захоплювач із шарнірно-важільним механізмом у процесі монтажу блока із пустотами. Кран-маніпулятор складається із основи 1, нерухомої колони 2 на цій основі 1 та горизонтальної консольно-поворотної стріли 3 на колоні 2. Кінцевий, дальній від колони 2 1 UA 91468 U 5 10 15 20 25 30 35 40 45 ланцюг 4 стріли 3 має лебідку 5 з гаком 6. На цей гак 6 підвішений фрикційний захоплювач 7 із шарнірно-важільним механізмом. Захоплювач 7 має пару вертикально змонтованих ножичного типу двоплечих важелів 8. Нижні плечі важелів 8 обладнано щічками 9, що тертям по внутрішній бічній поверхні взаємодіють з блоком 10. А верхні плечі цих же важелів 8 попарно з'єднано з протилежними через телескопічні трубки 11, і з сусідніми - через ланцюги 12. З'єднувальні шарніри 13 пар двоплечих важелів 8 змонтовані на горизонтальній телескопічній трубці 14. Така ж трубка 15 змонтована і на з'єднанні ланцюгів 12. На трубці 15 є пара втулок 16, до котрих приєднано канат 17, що зазвичай висить на гаку 6 лебідки 5. На парах важелів 8 передбачено замок 18 із скобою у отворі одного із них та пазом 19 у іншому. Працює кран-маніпулятор наступним чином. У зображеному на кресленнях стані відбувається підйом блока для наступного монтажу. При цьому основа 1 разом із нерухомою стрілою 2 зафіксована гальмами своїх коліс або гвинтовими домкратами. Лебідка 5, що змонтована на ланцюзі 4 стріли 3 через гак 6 працює на підйом фрикційного захоплювача 7 з блоком 10. Коли цей блок 10 піднято над місцем встановлення, лебідку 5 вимикають і здійснюють горизонтальне переміщення блока 10 за допомогою поворотів ланцюгів 4 стріли 3 відносно колони 2, один одного та раніше влаштованої кладки. Утримуючи блок 10 від можливого обертання руками, оператор вмикає лебідку 5 на повільне опускання гака 6. Встановивши блок 10 на підготовлене місце, треба від'єднати його від щічок 9 захоплювача 8. Тертя зникає зразу ж після перенесення ваги блока 10 на нижче розташований. Але далі треба вручну трохи звести телескопічні трубки 11. Тоді автоматично щічки 9 відійдуть усередину блока 10. Це відбудеться через взаємодію з поворотом ланцюгів 12, двоплечих важелів 8 на горизонтальній телескопічній трубці 14 у шарнірах 13. Щоб зафіксувати таке положення захоплювача 8, замки 18 із скобами встановлюють та фіксують у пазах 19 відповідних пар важелів 8. Далі вмикають на підйом лебідку 5. її гак 6 тягне канат 17, втулки 16, трубку 15, а разом з ними - і весь захоплювач 7. Далі цей же захоплювач 7 опускають в отвори наступного блока 10. Скоби 18 замків вручну виводять із пазів 19. Повільно починаючи підйом лебідкою 5 гаку 6, автоматично відбудеться фіксація силами тертя наступного блока 10 та його підйом до місця встановлення. Для монтажу блоків іншого типорозміру по довжині, передбачено переналагодження захоплювача 7 шляхом зміни довжини та її наступної фіксації телескопічними з'єднувальними трубками 11 та 14. Як видно із опису, використовуючи запропоноване обладнання, можна розширити технологічні можливості крана-маніпулятора на виробництво кам'яних робіт із мурування стін із стінових каменів, а особливо, дрібних блоків із вертикальними пустотами. Стає можливим повністю механізувати найбільш важкі для робітників-мулярів операції із захоплення, підйому та опускання кожного каменю у потрібному місці. На підставі вищевикладеного можна зробити висновок, що задача, яка поставлена в корисній моделі -удосконалення пристрою за найближчим аналогом - виконана із досягненням технічного результату - повна механізація найбільш важких для робітників-мулярів операції із захоплення, підйому та опускання кожного каменю у потрібному, передбаченому проектом, місці. Джерела інформації: 1. Пат. № 1775540 СССР, МПК E04G21/16. Устройство для кладки стен/ Е.А. Элер, А.А. Борщевский, Е.Ю. Малиновский. - № 4817918/33; заявл. 23.04.90, опубл. 15.11.91; Бюл. № 42. 3 с. 2. Пат. № 1283087 СССР, МПК B25J11/00. Манипулятор/ СВ. Зайцев, С.Н. Плеханов. - № 3806198/25-08; заявл. 30.10.84, опубл. 15.01.87; Бюл. № 2. - 3 с. (найближчий аналог). ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 Кран-маніпулятор, що складається із основи, нерухомої колони на ній, горизонтальної консольно-поворотної стріли, фрикційного захоплювача із шарнірно-важільним механізмом та механізму підйому фрикційного захоплювача, який змонтовано на кінцевому ланцюгу стріли, який відрізняється тим, що механізм підйому виконано у вигляді лебідки, а захоплювач підвішений на її гаку. 2 UA 91468 U 3 UA 91468 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюShalennyi Vasyl Tymofiiovych
Автори російськоюШаленный Василий Тимофеевич
МПК / Мітки
МПК: B25J 11/00
Мітки: кран-маніпулятор
Код посилання
<a href="https://ua.patents.su/6-91468-kran-manipulyator.html" target="_blank" rel="follow" title="База патентів України">Кран-маніпулятор</a>
Гідравлічний кран-маніпулятор
Номер патенту: 3977
Опубліковано: 15.12.2004
Автори: Бондаренко Борис Маврович, Яковлєв Сергій Олександрович, Радкевич Анатолій Валентинович
МПК: B66C 23/08, B66C 23/04
Мітки: гідравлічний, кран-маніпулятор
Формула / Реферат:
Гідравлічний кран-маніпулятор, що містить поворотну стійку з встановленою на ній телескопічною стрілою, вантажозахватним органом, слідкуючою системою, гідравлічним приводом та електронною системою управління, який відрізняється тим, що він установлений на самохідному шасі, оголовок його стріли виконаний у вигляді кутової секції зі з'єднуючою обоймою, фіксуючою віссю, гідроциліндром нахилу кутової секції, крім цього, кран має блок...
Кран-маніпулятор вантажного автомобіля
Номер патенту: 57021
Опубліковано: 16.06.2003
Автор: Охримович Володимир Маркіянович
МПК: B60P 1/54
Мітки: кран-маніпулятор, вантажного, автомобіля
Формула / Реферат:
1. Кран-маніпулятор вантажного автомобіля, що містить гідравлічний привід, нерухомо прикріплену до лонжеронів шасі між кабіною і переднім бортом кузова поперечну балку з висувними опорами, обладнаними на кінцях опорними гідроциліндрами, вертикально встановлену на поперечній балці і зміщену до одного з бокових бортів поворотну колону, багатосекційну стрілу, шарнірно приєднану до поворотної колони з можливістю обертання у вертикальній площині і...
Кран-маніпулятор
Номер патенту: 18681
Опубліковано: 15.11.2006
Автори: Міщук Дмитро Олександрович, Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович
МПК: B60P 1/64
Мітки: кран-маніпулятор
Формула / Реферат:
Кран-маніпулятор, що містить автомобільний тягач, вантажну платформу, закріплену на рамі шасі тягача за допомогою болтових стяжних вузлів, розташований за кабіною тягача вантажопідйомний механізм у вигляді гідроманіпулятора, який складається з поворотного стояка і шарнірно закріпленої до його кінця поворотної стріли на кінці якої закріплена телескопічна поворотна рукоять, виносні опори і гідравлічну апаратуру керування, який відрізняється...
Кран-маніпулятор стрілового типу

Номер патенту: 69226
Опубліковано: 25.04.2012
Автори: Бобров Валентин Григорович, Дзержинський Віталій Олександрович, Кашанський Дмитро Анатолійович, Ісакова Анна Миколаївна
МПК: B66C 23/42, B60P 3/41, B60P 1/54
Мітки: стрілового, типу, кран-маніпулятор
Формула / Реферат:
1. Кран-маніпулятор стрілового типу, що включає встановлену на транспортному засобі раму з аутригерами, вертикальний поворотний стояк з механізмом обертання і опорно-поворотним пристроєм, змонтованим на рамі, шарнірно-зчленовану телескопічну стрілу із змінним вантажозахоплювальним органом, рухомо закріплену у верхній частині поворотного стояка і забезпечену гідроциліндрами підйому стріли і гідроциліндром висунення телескопічної частини...
Кран-маніпулятор із цифровим керуванням
Номер патенту: 53842
Опубліковано: 25.10.2010
Автори: Міщук Дмитро Олександрович, Ловейкін Вячеслав Сергійович
МПК: B60P 1/64
Мітки: кран-маніпулятор, керуванням, цифровим
Формула / Реферат:
Кран-маніпулятор, що складається з автомобільного тягача, закріплених на рамі шасі тягача за допомогою болтових стяжних вузлів вантажної платформи, виносних опор і гідравлічної апаратури керування, розташованого за кабіною тягача вантажопідйомного механізму у вигляді гідроманіпулятора, який складається з поворотного стояка і шарнірно закріпленої до його кінця поворотної стріли, на кінці якої закріплена телескопічна поворотна рукоять, який...
Попередній патент: Фільтр
Наступний патент: Трибоелектростатичний сепаратор
Випадковий патент: Вимірювальний пристрій на пересувній збиральній машині