Кран-маніпулятор
Номер патенту: 18681
Опубліковано: 15.11.2006
Автори: Міщук Дмитро Олександрович, Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович
Формула / Реферат
Кран-маніпулятор, що містить автомобільний тягач, вантажну платформу, закріплену на рамі шасі тягача за допомогою болтових стяжних вузлів, розташований за кабіною тягача вантажопідйомний механізм у вигляді гідроманіпулятора, який складається з поворотного стояка і шарнірно закріпленої до його кінця поворотної стріли на кінці якої закріплена телескопічна поворотна рукоять, виносні опори і гідравлічну апаратуру керування, який відрізняється тим, що в гідравлічну апаратуру керування виконавчих механізмів включено багатосекційний двопотоковий золотниковий розподільник із золотниками, які на своїх відсічених робочих кромках містять дроселюючі щілини у вигляді циліндричних проточок змінного перерізу по своїй довжині, що встановлені в центральному отворі корпусу з розташованими в ньому в напрямку від торців корпусу до центра і з'єднаними відповідно зі зливними, відвідними, додатковими каналами карманами, а також карманами, з'єднаними з нагнітальними, допоміжними і додатковими каналами, причому кармани, що з'єднані з нагнітальними каналами, через вхідні канали і зворотні клапани з'єднані з допоміжними каналами.
Текст
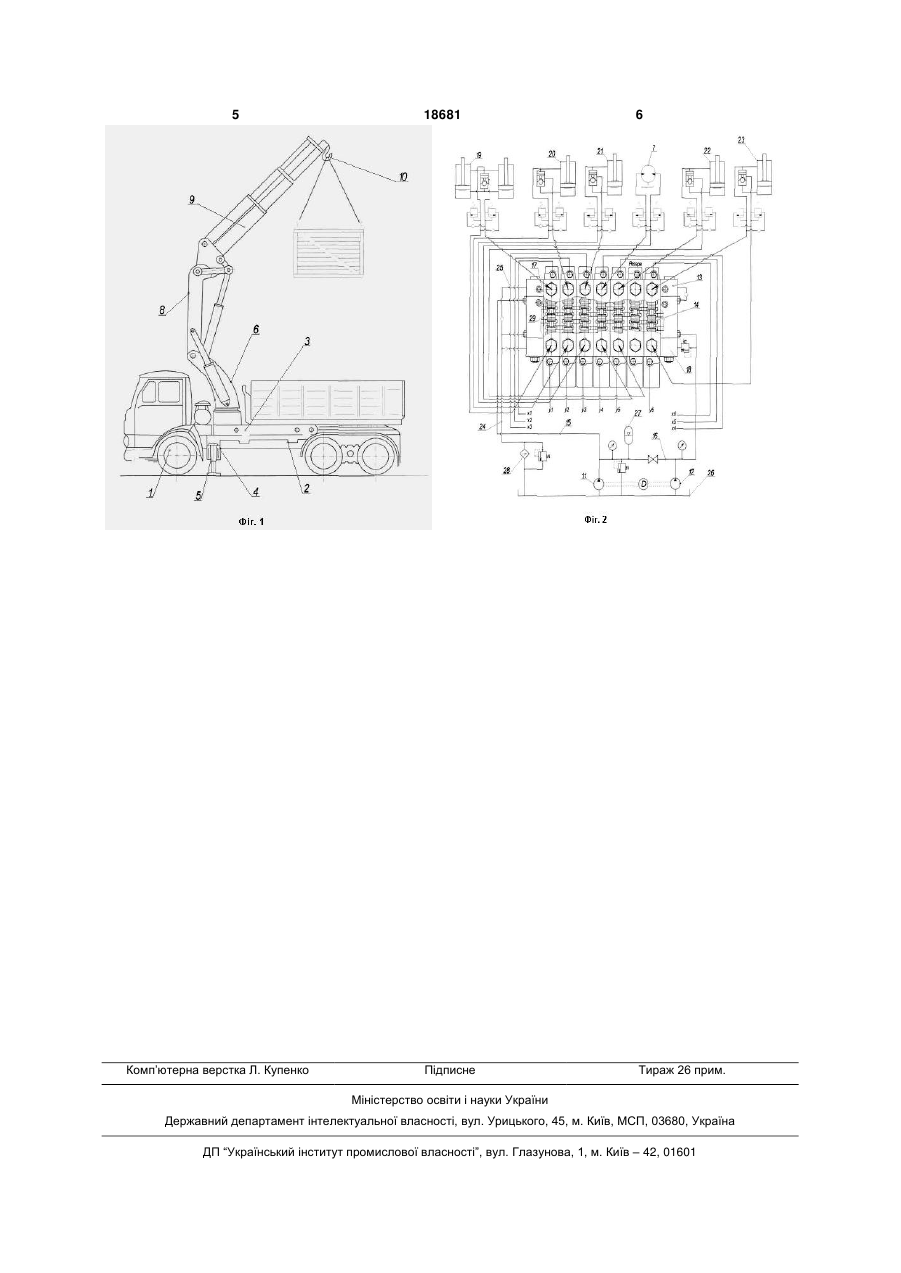
Кран-маніпулятор, що містить автомобільний тягач, вантажну платформу, закріплену на рамі шасі тягача за допомогою болтових стяжних вузлів, розташований за кабіною тягача вантажопідйомний механізм у вигляді гідроманіпулятора, який складається з поворотного стояка і шарнірно закріпленої до його кінця поворотної стріли на кінці якої закріплена телескопічна поворотна рукоять, виносні опори і гідравлічну апаратуру керування, 3 18681 4 пуску відбувається миттєве повне відкриття нагніколони 6 шарнірно приєднана поворотна стріла 8 тальних секцій, що й призводить до гідравлічних на кінці якої шарнірно закріплена телескопічна ударів у виконавчих механізмах кранарукоять 9, обладнана на кінці вантажозахоплююманіпулятора. чим пристроєм 10. Гідравлічна апаратура кранаКорисною моделлю ставиться завдання підманіпулятора містить гідронасоси 11 й 12, двоповищення ефективності крана-маніпулятора. токовий гідророзподільник 13 з розташованими в Поставлене корисною моделлю завдання доньому золотниками 14, напорні гідролінії 15 і 16, сягається тим, що в крані-маніпуляторі, який місякі зв’язані з направленими один назустріч одному тить автомобільний тягач, вантажну платформу проточними каналами 17 й 18 золотникового гідзакріплену на рамі шасі тягача за допомогою болророзподільника 13, що забезпечує зустрічний рух тових стяжних вузлів, розташований за кабіною потоків робочої рідини. В гідросхему також вклютягача вантажопідйомний механізм у вигляді гідчені гідродвигуни робочих органів, а саме: підйому романіпулятора, який складається з поворотного і опускання стріли 19, рукояті 20, висування телесстояка і шарнірно закріпленої до його кінця повокопічної рукояті 21, гідроциліндри висувних опор ротної стріли на кінці якої закріплена телескопічна 22, 23, а також зливні гідролінії 24, 25 що з’єднані з поворотна рукоять, виносні опори і гідравлічну баком 26. Для зменшення гідравлічних ударів в апаратуру керування, згідно корисній моделі в гідгідравлічну схему включено гідроакумулятор 27. равлічну апаратуру керування виконавчих механіКран-маніпулятор працює наступним чином. змів включено багатосекційний двопотоковий зоВиставляють кран на висувні опори 4 з опорлотниковий розподільник із золотниками, які на ними гідроциліндрами 5. За допомогою двигуна своїх відсічених робочих кромках містять дросебазової машини приводять в роботу робочі гідролюючі щілини у вигляді циліндричних проточок насоси 11 і 12. Від насоса 11 (Фіг.2) робоча рідина змінного перерізу по своїй довжині, що встановлепо напорній гідролінії 15 потрапляє в проточний ні в центральному отворі корпусу з розташованиканал 17 багатозолотникового розподільника 13 і ми в ньому в напрямку від торців корпусу до при нейтральному положенні всіх золотників робоцентру і з'єднаними відповідно зі зливними, відвідча рідина по зливній гідролінії 25 потрапляє через ними, додатковими каналами карманами, а також фільтр 28 в гідробак 26. Від насоса 12 робоча рікарманами, з'єднаними з нагнітальними, допоміждина по напорній гідролінії 16 потрапляє в проточними і додатковими каналами, причому кармани, ний канал 18 багатозолотникового розподільника що з'єднані з нагнітальними каналами, через вхідні 13 і при нейтральному положенні всіх золотників канали і зворотні клапани з'єднані з допоміжними робоча рідина по зливній гідролінії 24 потрапляє каналами. через фільтр 28 в гідробак 26. При дії керуючим При роботі завдяки тому, що на золотниках сигналом х1 на золотниковий розподільник 13 відбудуть нарізані такі канавки в момент, коли вони бувається ввімкнення однієї із секцій золотників під дією керуючого сигналу почнуть рухатися і відбагатозолотникового розподільника 13, перекрикривати вхідні канали, то спочатку робоча рідина вається проточний канал 17 і робоча рідина потбуде потрапляти у відвідну лінію через ці дросельрапляє до гідродвигуна 19, причому завдяки наріні канавки, а при повному відкритті - рідина вже заним на золотнику спеціальним дроселюючим буде напряму потрапляти у відвідну порожнину. щілинам 29 перекриття проточного каналу відбуСаме така робота й буде створювати умови плаввається не миттєво, а поступово, що унеможливного пуску, зменшуючи дію гідравлічного удару по лює гідравлічні удари великих амплітуд. Від гідровиконавчих механізмах. двигуна 19 робоча рідина потрапляє в зливну На Фіг.1 - зображений загальний вигляд кранагідролінію 25 багатозолотникового розподільника маніпулятора; 13. Аналогічною буде робота й гідронасоса 12. на Фіг.2 - гідравлічна схема; Підвищення ефективності кранаКран-маніпулятор складається з шасі 1 до раманніпулятора відбувається за рахунок встановми 2 якого прикріплена нерухома рама 3 з висувлення в гідравлічну схему вдосконаленого двопоними опорами 4, обладнаними опорними гідроцитокового багатосекційного золотникового розподіліндрами 5. На нерухомій рамі 3 вертикально льника, який за рахунок змінених своїх встановлена поворотна колона 6 з приводом обегеометричних параметрів створює умови плавного ртання від гідродвигуна 7 (Фіг.2). До поворотної пуску. 5 Комп’ютерна верстка Л. Купенко 18681 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюCrane-manipulator
Автори англійськоюLoveikin Viacheslav Serhiiovych, Yaroshenko Volodymyr Fedorovych, Mischuk Dmytro Oleksandrovych
Назва патенту російськоюКран-манипулятор
Автори російськоюЛовейкин Вячеслав Сергеевич, Ярошенко Владимир Федорович, Мищук Дмитрий Александрович
МПК / Мітки
МПК: B60P 1/64
Мітки: кран-маніпулятор
Код посилання
<a href="https://ua.patents.su/3-18681-kran-manipulyator.html" target="_blank" rel="follow" title="База патентів України">Кран-маніпулятор</a>
Гідравлічний кран-маніпулятор
Номер патенту: 3977
Опубліковано: 15.12.2004
Автори: Радкевич Анатолій Валентинович, Бондаренко Борис Маврович, Яковлєв Сергій Олександрович
МПК: B66C 23/04, B66C 23/08
Мітки: гідравлічний, кран-маніпулятор
Формула / Реферат:
Гідравлічний кран-маніпулятор, що містить поворотну стійку з встановленою на ній телескопічною стрілою, вантажозахватним органом, слідкуючою системою, гідравлічним приводом та електронною системою управління, який відрізняється тим, що він установлений на самохідному шасі, оголовок його стріли виконаний у вигляді кутової секції зі з'єднуючою обоймою, фіксуючою віссю, гідроциліндром нахилу кутової секції, крім цього, кран має блок...
Кран-маніпулятор вантажного автомобіля
Номер патенту: 57021
Опубліковано: 16.06.2003
Автор: Охримович Володимир Маркіянович
МПК: B60P 1/54
Мітки: кран-маніпулятор, вантажного, автомобіля
Формула / Реферат:
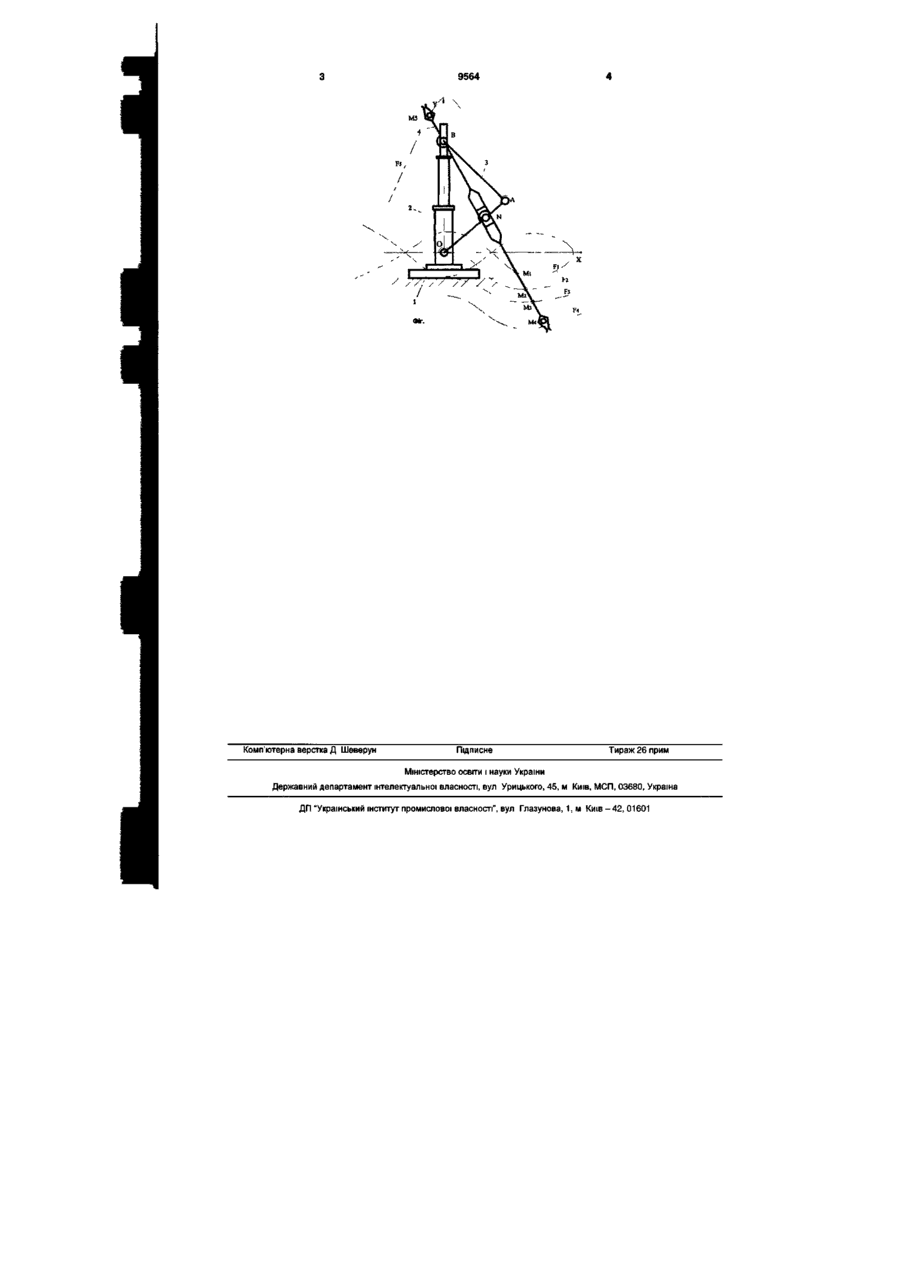
1. Кран-маніпулятор вантажного автомобіля, що містить гідравлічний привід, нерухомо прикріплену до лонжеронів шасі між кабіною і переднім бортом кузова поперечну балку з висувними опорами, обладнаними на кінцях опорними гідроциліндрами, вертикально встановлену на поперечній балці і зміщену до одного з бокових бортів поворотну колону, багатосекційну стрілу, шарнірно приєднану до поворотної колони з можливістю обертання у вертикальній площині і...
Маніпулятор ручний

Номер патенту: 54126
Опубліковано: 17.02.2003
Автор: Черкащенко Григорій Миколайович
МПК: A01G 3/00
Мітки: ручний, маніпулятор
Формула / Реферат:
1. Маніпулятор ручний, що містить несучий елемент, виконаний у вигляді штанги, різальний ніж, розміщений на його кінці і жорстко прикріплений до нього, протирізальний ніж, що шарнірно з'єднаний з тягою, важіль управління, зв'язаний з тягою, який відрізняється тим, що робоча поверхня різального ножа виконана клиноподібної форми, а робоча поверхня протирізального ножа має прямокутну форму, при цьому робочі поверхні ножів зміщені одна відносно...
Маніпулятор

Номер патенту: 50260
Опубліковано: 15.10.2002
Автори: Вігдергауз Леонід Павлович, Москаленко Олександр Володимирович
МПК: E21B 1/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, що складається із стріли, шарнірно приєднаної до нерухомої напрямної телескопічного подавача бурильної машини, спареного гідроциліндра переміщення подавача нагору і вниз, гідроциліндра переміщення стріли маніпулятора у вертикальній площині, гідроциліндра повороту стріли маніпулятора за допомогою рейкової зубчатої передачі і кронштейна, до якого приєднана стріла, і гідроциліндра переміщення стріли у вертикальній площині, який...
Маніпулятор
Номер патенту: 9564
Опубліковано: 17.10.2005
Автори: Бергер Євгеній Емильович, Табацков Вячеслав Петрович, Іванов Геннадій Олександрович, Бергер Еміль Григорович
МПК: B25J 11/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, який має основу з силовим циліндром та захоплювач руки робота, який відрізняється тим, що він обладнаний кривошипно-шатунним механізмом, ланки якого шарнірно закріплені до штока корпусу силового циліндра кулісою, яка оснащена розмічальними штифтами.
Попередній патент: Пристрій для керування зміною вильоту стріли у крані з горизонтальним переміщенням вантажу
Наступний патент: Штанговий глибинний насос
Випадковий патент: Вузол підтримуючого пристрою машини безперервного лиття заготовок