Кран-маніпулятор із цифровим керуванням
Номер патенту: 53842
Опубліковано: 25.10.2010
Автори: Міщук Дмитро Олександрович, Ловейкін Вячеслав Сергійович
Формула / Реферат
Кран-маніпулятор, що складається з автомобільного тягача, закріплених на рамі шасі тягача за допомогою болтових стяжних вузлів вантажної платформи, виносних опор і гідравлічної апаратури керування, розташованого за кабіною тягача вантажопідйомного механізму у вигляді гідроманіпулятора, який складається з поворотного стояка і шарнірно закріпленої до його кінця поворотної стріли, на кінці якої закріплена телескопічна поворотна рукоять, який відрізняється тим, що в гідравлічну схему керування виконавчих механізмів включено пропорційний золотниковий розподільник з електромагнітним приводом по кожному золотнику, а увімкнення, вимкнення та регулювання сили керуючого струму, який подається на пропорційні електромагніти розподільника, здійснюється через клемну коробку та підсилювачі аналогового сигналу за допомогою цифро-аналогових перетворювачів із живленням від акумулятора базового автомобіля, які програмуються за допомогою персонального комп'ютера.
Текст
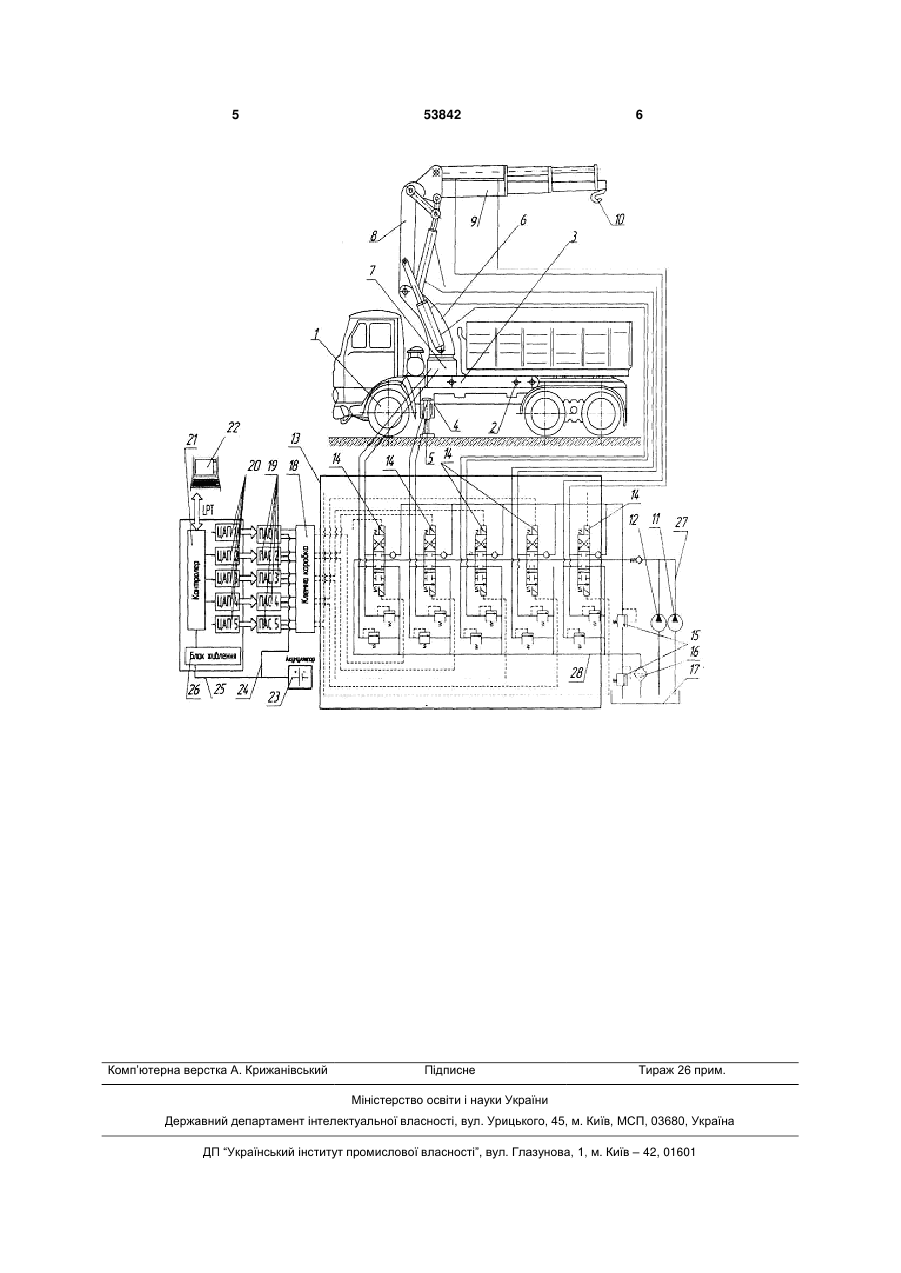
Кран-маніпулятор, що складається з автомобільного тягача, закріплених на рамі шасі тягача за допомогою болтових стяжних вузлів вантажної платформи, виносних опор і гідравлічної апаратури керування, розташованого за кабіною тягача вантажопідйомного механізму у вигляді гідроманіпулятора, який складається з поворотного стояка і 3 оскільки управління золотниковим розподільником здійснюється безпосередньо оператором, який визначає керуючу дію виходячи зі своїх власних відчуттів, а також відсутність підключення гідроапаратури до електронних машин обрахунку через те, що на даному прототипі встановлена звичайна система гідроприводу з циліндричним золотниковим розподільником. Технічним завданням корисної моделі є підвищення ефективності крана - маніпулятора за рахунок встановлення в гідравлічну схему вищезгаданого прототипа вдосконаленого проточного пропорційного золотникового розподільника з цифро - аналоговою системою керування, який за рахунок можливого свого програмування, створив би бажані програмні режими плавного руху. Поставлене завдання досягається тим, що в гідравлічну схему керування гідроциліндрів крана маніпулятора встановлюється пропорційний золотниковий розподільник з електромагнітним приводом по кожному золотнику, а увімкнення, вимкнення та регулювання сили керуючого струму, який подається на пропорційні електромагніти розподільника здійснюється через клемну коробку та підсилювачі аналогового сигналу за допомогою цифро аналогових перетворювачів, які програмуються за допомогою персонального комп'ютера. При роботі крана - маніпулятора завдяки тому, що в його гідросистему введено пропорційний розподільник із системою цифрового керування, з'явиться можливість програмувати рух стріли крана - маніпулятора. Розрахувавши попередньо на персональному комп'ютері потрібний закон руху, сформувавши програмним забезпеченням необхідний пакет даних одержаного закону руху та передавши його через лінійний канал комп'ютера на цифро - аналоговий перетворювач, який цей сигнал перетворить на аналогову величину керуючого струму. Отриманий струм через підсилювачі струму потраплятиме на пропорційні електромагніти розподільника. Внаслідок того, що на пропорційних електромагнітах, які виконують роль приводу золотників розподільника, величина струму буде змінюватися з визначеним кроком, електромагніти позиціюватимуть золотники не лише в крайніх кінцевих положеннях, але й в проміжних. Саме така робота й буде створювати умови програмованого плавного пуску, зменшуючи при цьому дію гідравлічного удару по виконавчим механізмам. Суть корисної моделі пояснюється кресленням, де: на Фіг. - зображений загальний вигляд кранаманіпулятора із цифровим керуванням. Кран-маніпулятор складається з шасі 1 (Фіг.), до рами 2 якого прикріплена нерухома рама 3 з 53842 4 висувними опорами 4, обладнаними опорними гідроциліндрами 5. На нерухомій рамі 3 вертикально встановлена поворотна колона 6 з приводом обертання від гідродвигуна 7. До поворотної колони 6 шарнірно приєднана поворотна стріла 8, на кінці якої шарнірно закріплена телескопічна рукоять 9, яка обладнана на кінці вантажозахоплюючим пристроєм 10. Гідравлічна схема кранаманіпулятора містить гідронасоси 11 й 12, пропорційний гідророзподільник 13 з електромагнітним приводом 14, розташованим на кожному із золотників, запобіжних клапанів 15, фільтра 16 та гідробака 17. Електричні виходи електромагнітів 14 через клемну коробку 18 замкнені на підсилювачах 19 аналогових сигналів. До підсилювачів аналогових сигналів підключено цифро - аналогові перетворювачі 20, які через контролер 21 під'єднано до персонального комп'ютера 22. Живлення струмом підсилювачів аналогових сигналів (ПАС) 19 відбувається від акумулятора 23 базового автомобіля через провідникову систему 24, а цифро - аналогових перетворювачів (ЦАП) 20 - по каналу 25 через блок живлення 26 та контролер 21. Кран-маніпулятор працює наступним чином. Виставляють кран на висувні опори 4 з опорними гідроциліндрами 5. За допомогою двигуна базової машини приводять в роботу робочі гідронасоси 11 і 12. Від насосів 11 та 12 (Фіг.) робоча рідина по напорній гідролінії 27 потрапляє в напірний канал секцій пропорційного розподільника 13 і при нейтральному положенні всіх золотників по зливній гідролінії 28 потрапляє через фільтр 16 в гідробак 17. Визначивши необхідний режим та траєкторію руху, оператор крана - маніпулятора за допомогою програмного забезпечення формує цифровий керуючий сигнал на комп'ютері 22, який потоком даних передається через контролер 21 на відповідний ЦАП 20, де відбувається перетворення цифрового сигналу на аналоговий - керуючу силу струму. Аналоговий сигнал від ЦАП по лінії зв'язку передається на відповідний підсилювач 19, де керуюча сила струму підсилюється до величини пропорційної величині струму живлення пропорційних електромагнітів 14. Підсилювач 19 через клемну коробку18 подає струм до відповідного електромагніта 14 розподільника 13. При подачі на електромагніти 14 струму, вони встановлять відповідний золотник розподільника 13 в заданому положенні, тим самим відкривши прохідний отвір по якому робоча рідина потраплятиме до привідних гідроциліндрів крана - маніпулятора. По завершенні руху, оператор крана - маніпулятора формує на комп'ютері новий сигнал та передає його керуючі пристрої, робота яких буде аналогічно описаній вище. 5 Комп’ютерна верстка А. Крижанівський 53842 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюCrane-manipulator with digital control
Автори англійськоюLoveikin Viacheslav Serhiiovych, Mischuk Dmytro Oleksandrovych
Назва патенту російськоюКран-манипулятор с цифровым управлением
Автори російськоюЛовейкин Вячеслав Сергеевич, Мищук Дмитрий Александрович
МПК / Мітки
МПК: B60P 1/64
Мітки: цифровим, керуванням, кран-маніпулятор
Код посилання
<a href="https://ua.patents.su/3-53842-kran-manipulyator-iz-cifrovim-keruvannyam.html" target="_blank" rel="follow" title="База патентів України">Кран-маніпулятор із цифровим керуванням</a>
Кран-маніпулятор
Номер патенту: 18681
Опубліковано: 15.11.2006
Автори: Міщук Дмитро Олександрович, Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович
МПК: B60P 1/64
Мітки: кран-маніпулятор
Формула / Реферат:
Кран-маніпулятор, що містить автомобільний тягач, вантажну платформу, закріплену на рамі шасі тягача за допомогою болтових стяжних вузлів, розташований за кабіною тягача вантажопідйомний механізм у вигляді гідроманіпулятора, який складається з поворотного стояка і шарнірно закріпленої до його кінця поворотної стріли на кінці якої закріплена телескопічна поворотна рукоять, виносні опори і гідравлічну апаратуру керування, який відрізняється...
Гідравлічний кран-маніпулятор
Номер патенту: 3977
Опубліковано: 15.12.2004
Автори: Бондаренко Борис Маврович, Радкевич Анатолій Валентинович, Яковлєв Сергій Олександрович
МПК: B66C 23/08, B66C 23/04
Мітки: гідравлічний, кран-маніпулятор
Формула / Реферат:
Гідравлічний кран-маніпулятор, що містить поворотну стійку з встановленою на ній телескопічною стрілою, вантажозахватним органом, слідкуючою системою, гідравлічним приводом та електронною системою управління, який відрізняється тим, що він установлений на самохідному шасі, оголовок його стріли виконаний у вигляді кутової секції зі з'єднуючою обоймою, фіксуючою віссю, гідроциліндром нахилу кутової секції, крім цього, кран має блок...
Багатопозиційний поворотний привід з цифровим керуванням
Номер патенту: 35218
Опубліковано: 10.09.2008
Автори: Новік Микола Андрійович, Кучерук Юрій Миколайович
МПК: F15B 7/00
Мітки: багатопозиційний, цифровим, привід, поворотний, керуванням
Формула / Реферат:
1. Багатопозиційний поворотний привід з цифровим керуванням, що містить циліндри повороту і зворотного повороту, поршні яких утворюють робочі камери і з'єднані із зубчастими рейками, що зчіплюються із вихідною шестірнею, гідравлічні дозатори, з розміщеними в них поршнями з утворенням робочих і гідравлічних камер, який відрізняється тим, що гідравлічні камери дозаторів сполучені з вхідними каналами зворотного клапана з дроселем, вихідні канали...
Кран-маніпулятор вантажного автомобіля
Номер патенту: 57021
Опубліковано: 16.06.2003
Автор: Охримович Володимир Маркіянович
МПК: B60P 1/54
Мітки: кран-маніпулятор, автомобіля, вантажного
Формула / Реферат:
1. Кран-маніпулятор вантажного автомобіля, що містить гідравлічний привід, нерухомо прикріплену до лонжеронів шасі між кабіною і переднім бортом кузова поперечну балку з висувними опорами, обладнаними на кінцях опорними гідроциліндрами, вертикально встановлену на поперечній балці і зміщену до одного з бокових бортів поворотну колону, багатосекційну стрілу, шарнірно приєднану до поворотної колони з можливістю обертання у вертикальній площині і...
Кран стріловий переставний
Номер патенту: 76135
Опубліковано: 17.07.2006
Автори: Хом'як Роман Ілліч, Швідлер Олександр Петрович
МПК: B66C 23/36, B62B 13/00
Мітки: кран, переставний, стріловий
Формула / Реферат:
Кран стріловий переставний, що містить тягач, опорну раму зі стійкою для стріли і з висувними опорами, на якій встановлені механізм повороту, вантажна лебідка, стрілове обладнання, кабіна керування крановою установкою і електродвигун, який відрізняється тим, що опорна рама виконана у вигляді саней з двома паралельними полозами, боковини яких взаємно віддалені на ширину дорожнього габариту крана і обладнані принаймні чотирма зачепами з...
Попередній патент: Спосіб лікування переломів великогомілкової кістки
Наступний патент: Рекуперативний гідропривід крана-маніпулятора
Випадковий патент: Радіаційно стійкий пластмасовий сцинтилятор