Апарат відновлення рухливості колінного, тазостегнового суглобів та стопи людини
Номер патенту: 91635
Опубліковано: 10.07.2014
Автори: Терещенко Микола Федорович, Румбешта Валентин Олександрович, Іваницька Алла Леонідівна, Філіппова Марина В`ячеславівна

Формула / Реферат
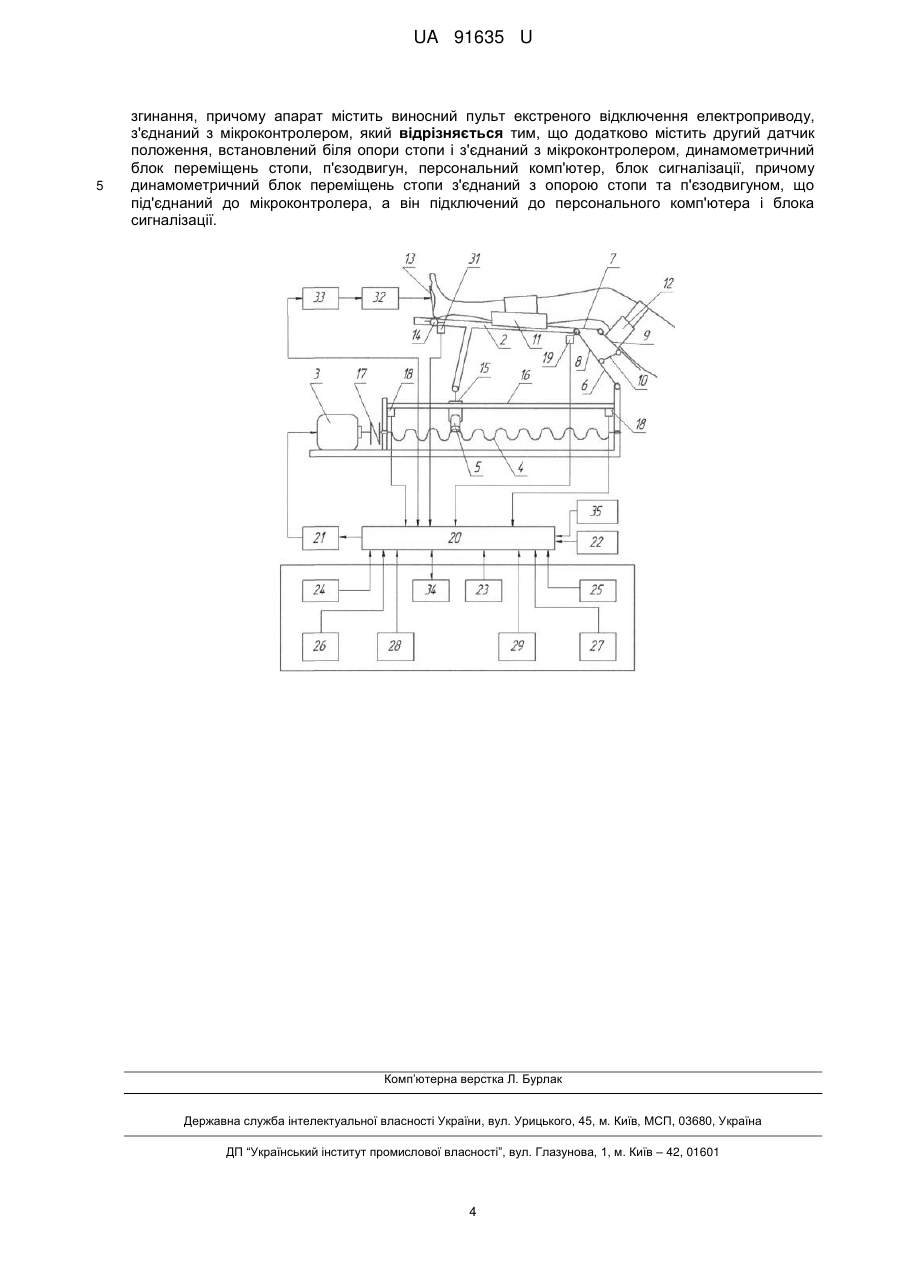
Апарат відновлення рухливості колінного, тазостегнового суглобів та стопи людини, що містить нерухому основу, раму, реверсивний електропривод, з'єднаний з гвинтовою парою у вигляді ходового гвинта і гайки, коромисла, шарнірно закріплені на підставі, трансмісію, два ложементи й опору для стопи, мікроконтролер, датчик положення, кінцеві вимикачі і вузол управління реверсивним електроприводом, трансмісія виконана у вигляді двох зв'язаних паралельно розташованих чотириланкових механізмів, причому коромисла жорстко пов'язані з другими ланками чотириланкових механізмів, суміжних з першими ланками, ложемент гомілки закріплений на рамі, ложемент стегна закріплений на третій ланці, суміжній з першими ланками і пов'язаних через четверту ланку з другими ланками, рама шарнірно пов'язана з кареткою, в пазу якої розташована гайка гвинтової пари з можливістю її переміщення в радіальному напрямку щодо осі ходового гвинта, на основі встановлені кінцеві вимикачі, що фіксують крайні положення каретки, на чотириланковий механізм встановлений датчик положення, мікроконтролер пов'язаний з вузлом управління реверсивним електроприводом, вихід якого з'єднаний з реверсивним електроприводом, а кінцеві вимикачі пов'язані з мікроконтролером, в панелі управління розташовані електрично пов'язані з мікроконтролером індикатор поточного значення кута згинання і встановлених значень мінімального і максимального кутів згинання, регулятор мінімального кута згинання, регулятор максимального кута згинання, регулятор витримки при мінімальному куті згинання, регулятор витримки при максимальному куті згинання, регулятор швидкості зміни кута згинання і регулятор початкової установки кута згинання, причому апарат містить виносний пульт екстреного відключення електроприводу, з'єднаний з мікроконтролером, який відрізняється тим, що додатково містить другий датчик положення, встановлений біля опори стопи і з'єднаний з мікроконтролером, динамометричний блок переміщень стопи, п'єзодвигун, персональний комп'ютер, блок сигналізації, причому динамометричний блок переміщень стопи з'єднаний з опорою стопи та п'єзодвигуном, що під'єднаний до мікроконтролера, а він підключений до персонального комп'ютера і блока сигналізації.
Текст
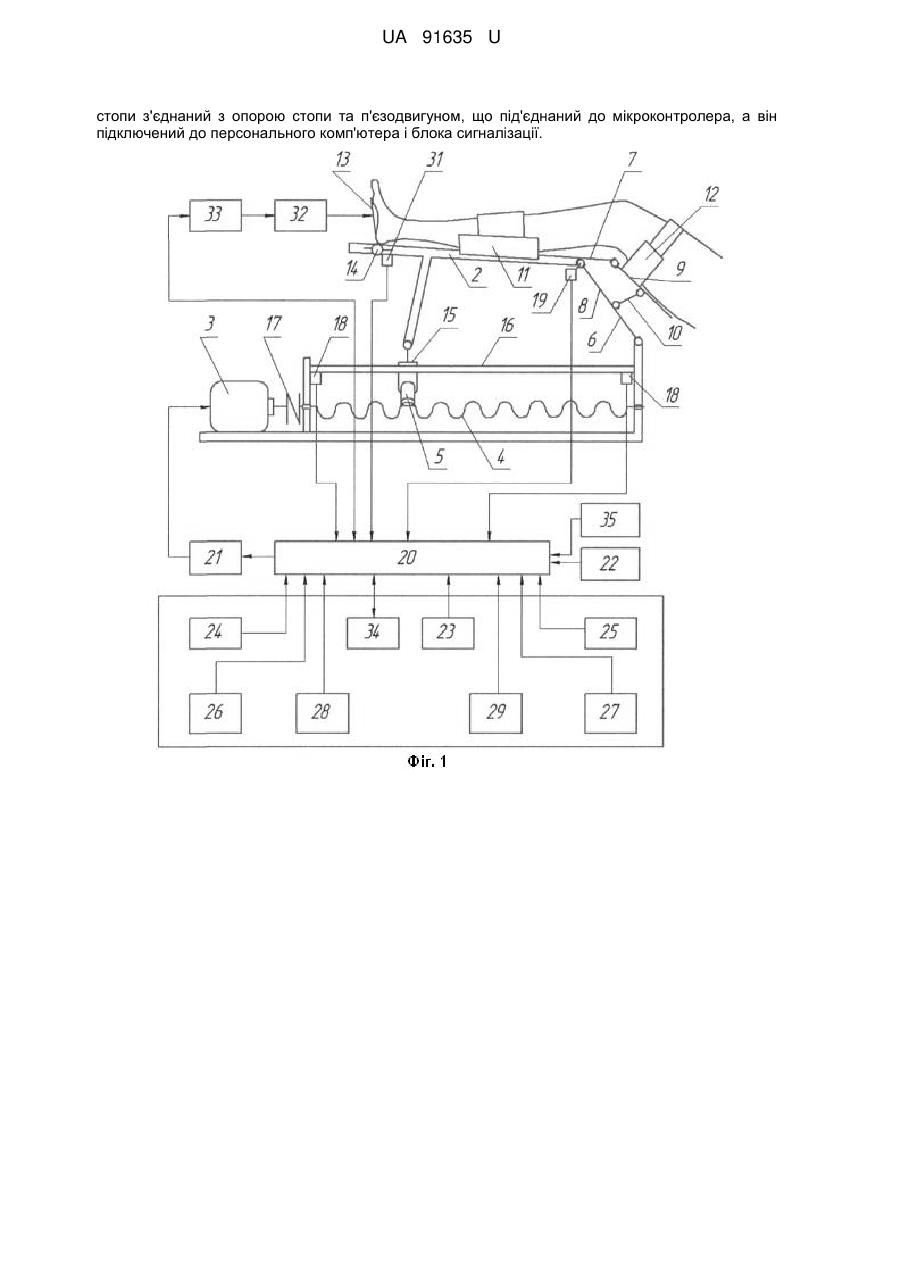
Реферат: Апарат відновлення рухливості колінного, тазостегнового суглобів та стопи людини містить нерухому основу, раму, реверсивний електропривод, з'єднаний з гвинтовою парою у вигляді ходового гвинта і гайки, коромисла, шарнірно закріплені на підставі, трансмісію, два ложементи й опору для стопи, мікроконтролер, датчик положення, кінцеві вимикачі і вузол управління реверсивним електроприводом, трансмісія виконана у вигляді двох зв'язаних паралельно розташованих чотириланкових механізмів, причому коромисла жорстко пов'язані з другими ланками чотириланкових механізмів, суміжних з першими ланками, ложемент гомілки закріплений на рамі, ложемент стегна закріплений на третій ланці, суміжній з першими ланками і пов'язаних через четверту ланку з другими ланками, рама шарнірно пов'язана з кареткою, в пазу якої розташована гайка гвинтової пари з можливістю її переміщення в радіальному напрямку щодо осі ходового гвинта, на основі встановлені кінцеві вимикачі, що фіксують крайні положення каретки, на чотириланковий механізм встановлений датчик положення, мікроконтролер пов'язаний з вузлом управління реверсивним електроприводом, вихід якого з'єднаний з реверсивним електроприводом, а кінцеві вимикачі пов'язані з мікроконтролером, в панелі управління розташовані електрично пов'язані з мікроконтролером індикатор поточного значення кута згинання і встановлених значень мінімального і максимального кутів згинання, регулятор мінімального кута згинання, регулятор максимального кута згинання, регулятор витримки при мінімальному куті згинання, регулятор витримки при максимальному куті згинання, регулятор швидкості зміни кута згинання і регулятор початкової установки кута згинання, причому апарат містить виносний пульт екстреного відключення електроприводу, з'єднаний з мікроконтролером. Додатково містить другий датчик положення, встановлений біля опори стопи і з'єднаний з мікроконтролером, динамометричний блок переміщень стопи, п'єзодвигун, персональний комп'ютер, блок сигналізації. Динамометричний блок переміщень UA 91635 U (12) UA 91635 U стопи з'єднаний з опорою стопи та п'єзодвигуном, що під'єднаний до мікроконтролера, а він підключений до персонального комп'ютера і блока сигналізації. UA 91635 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до механотерапевтичних апаратів пасивної дії для розробки колінного, тазостегнового суглобів та стопи людини з метою збільшення їх рухливості в процесі лікування та реабілітації. Відомо пристрій для розробки колінного і тазостегнового суглобів людини (винахід RU 2307638, кл. А61Н1/02, 10.10.2007), що містить нерухому основу, раму, реверсивний електропривод, з'єднаний з гвинтовою парою у вигляді ходового гвинта і гайки, коромисла, шарнірно закріплені на підставі, трансмісію, два ложемента й опору для стопи, містить мікроконтролер, датчик положення, кінцеві вимикачі і вузол управління реверсивним електроприводом, трансмісія виконана у вигляді двох зв'язаних паралельно розташованих чотириланкових механізмів, причому коромисла жорстко пов'язані з другими ланками чотириланкових механізмів, суміжних з першими ланками, ложемент гомілки закріплений на рамі, ложемент стегна закріплений на третій ланках, суміжних з першими ланками і пов'язаних через четверті ланки з другими ланками, рама шарнірно пов'язана з кареткою, в пазу якої розташована гайка гвинтової пари з можливістю її переміщення в радіальному напрямку щодо осі ходового гвинта, на підставі встановлені кінцеві вимикачі, що фіксують крайні положення каретки, на чотириланковий механізм встановлений датчик положення, мікроконтролер пов'язаний з вузлом управління реверсивним електроприводом, вихід якого з'єднаний з реверсивним електроприводом, а кінцеві вимикачі пов'язані з мікроконтролером. Також апарат містить панель управління, на якій розташовані електрично пов'язані з мікроконтролером індикатор поточного значення кута згинання і встановлених значень мінімального і максимального кутів згинання, регулятор мінімального кута згинання, регулятор максимального кута згинання, регулятор витримки при мінімальному куті згинання, регулятор витримки при максимальному куті згинання, регулятор швидкості зміни кута згинання, регулятор початкової установки кута згинання та виносний пульт екстреної зупинки. Основним недоліком цього пристрою є неможливість розробки стопи людини одночасно з колінним і тазостегновим суглобами, так як після деяких хвороб або травм необхідно розробляти всі суглоби одночасно. Задачею даної корисної моделі є розширення функціональних можливостей, шляхом створення умов одночасного відновлення та розробки колінного, тазостегнового суглобів та стопи. Технічний результат, на досягнення якого спрямована корисна модель, полягає у створенні ефективного реабілітаційного апарату, що дозволяє одночасно відновлювати та розробляти колінний, тазостегновий суглоби та стопу людини, що забезпечує легке і надійне управління процесом. Поставлена задача та технічний результат досягається тим, що апарат відновлення рухливості суглобів та стопи людини, що містить нерухому основу, раму, реверсивний електропривод, з'єднаний з гвинтовою парою у вигляді ходового гвинта і гайки, коромисла, шарнірно закріплені на підставі, трансмісію, два ложементи й опору для стопи, мікроконтролер, датчик положення, кінцеві вимикачі і вузол управління реверсивним електроприводом, трансмісія виконана у вигляді двох зв'язаних паралельно розташованих чотириланкових механізмів, причому коромисла жорстко пов'язані з другими ланками чотириланкових механізмів, суміжних з першими ланками, ложемент гомілки закріплений на рамі, ложемент стегна закріплений на третій ланці, суміжних з першими ланками і пов'язаних через четверту ланку з другими ланками, рама шарнірно пов'язана з кареткою, в пазу якої розташована гайка гвинтової пари з можливістю її переміщення в радіальному напрямку щодо осі ходового гвинта, на основі встановлені кінцеві вимикачі, що фіксують крайні положення каретки, на чотириланковий механізм встановлений датчик положення, мікроконтролер пов'язаний з вузлом управління реверсивним електроприводом, вихід якого з'єднаний з реверсивним електроприводом, а кінцеві вимикачі пов'язані з мікроконтролером, в панелі управління розташовані електрично пов'язані з мікроконтролером індикатор поточного значення кута згинання і встановлених значень мінімального і максимального кутів згинання, регулятор мінімального кута згинання, регулятор максимального кута згинання, регулятор витримки при мінімальному куті згинання, регулятор витримки при максимальному куті згинання, регулятор швидкості зміни кута згинання і регулятор початкової установки кута згинання, причому реабілітаційний апарат містить виносний пульт екстреного відключення електроприводу, з'єднаний з мікроконтролером, а апарат додатково містить другий датчик положення, встановлений біля опори стопи і з'єднаний з мікроконтролером, динамометричний блок переміщень стопи, п'єзодвигун, персональний комп'ютер, блок сигналізації, причому динамометричний блок переміщень стопи з'єднаний з опорою стопи та п'єзодвигуном, що 1 UA 91635 U 5 10 15 20 25 30 35 40 45 50 55 60 під'єднаний до мікроконтролера, а він підключений до персонального комп'ютера і блока сигналізації. На кресленні зображена функціональна схема апарату. Апарат відновлення рухливості суглобів та стопи людини містить нерухому основу 1, раму 2, реверсивний електропривод 3, з'єднаний з гвинтовою парою у вигляді ходового гвинта 4 і гайки 5, коромисла 6, шарнірно закріплені на нерухомій підставі, і трансмісію. Трансмісія виконана у вигляді двох паралельно розташованих чотириланкових механізмів, що містять першу 7, другу 8, третю 9 і четверту 10 ланки. Коромисла 6 жорстко пов'язані з другими ланками 8 чотириланкових механізмів, суміжних з першими ланками 7, ложемент гомілки 11 закріплений на рамі 2, ложемент стегна 12 закріплений на третій ланці 9, суміжних з першими ланками 7 і пов'язаних через четверту ланку 10 з другими ланками 8, опора стопи 13 встановлена на осі 14, що закріплюється елементами фіксації в пазу рами і контролює її положення другий датчик положення 31, динамометричний блок переміщень 32, який з'єднаний з п'єзодвигуном 33, а п'єзодвигун з'єднаний з мікроконтролером. Рама 2 шарнірно пов'язана з кареткою 15, в пазу якої розташована гайка 5 гвинтової пари з можливістю її переміщення по направляючій 16 в радіальному напрямку щодо осі ходового гвинта. Апарат містить муфту розмикання 17 та блок сигналізації 35, який повідомляє про помилки в ході виконання заданої програми реабілітації. Для забезпечення ефективного управління процесом рухливості суглобів та стопи людини апарат містить встановлені на підставі кінцеві вимикачі 18 і встановлений на чотириланковий механізм датчик положення 19, з'єднані з мікроконтролером 20, який через вузол керування реверсивним електроприводом 21 з'єднаний з реверсивним електроприводом 3. В апараті передбачений виносний пульт екстреного відключення реверсивного електроприводу 22, електрично пов'язаний з мікроконтролером 20. Для забезпечення управління процесом відновлення рухливості колінного, тазостегнового суглобів та стопи людини передбачена панель управління 30, на якій розташовані пов'язані з мікроконтролером 20 індикатор поточного значення кута згинання і встановлених значень мінімального і максимального кутів згинання 23, регулятор мінімального кута згинання 24, регулятор максимального кута згинання 25, регулятор витримки при мінімальному куті згинання 26, регулятор витримки при максимальному куті згинання 27, регулятор швидкості зміни кута згинання 28 і регулятор початкової установки кута згинання 29 та персональний комп'ютер 34, який задає програму для розроблення стопи. Як контролер використовується РІС - контролер типу PIC16F877-20IP фірми "Microchip" чи другий з подібними технічними характеристиками. Схема підсилювача потужності побудована на чотирьох потужних транзисторних ключах, що забезпечують реверсивне управління електродвигуном. Використання в підсилювачі потужності ключових схем дозволяє значно знизити потужність розсіювання і полегшити тепловий режим вихідних транзисторних ключів і отже, підвищити ККД і надійність всього пристрою. Як електродвигун використовується колекторний двигун з порушенням постійним магнітом типу МЕ241 чи подібний. Для управління частотою обертання електродвигуна використовується метод широтно-імпульсної модуляції (ШІМ), що забезпечує економічну і надійну роботу ключових транзисторних каскадів. ШІМ здійснюється окремим модулюючим транзистором, керованим безпосередньо РІСконтролером. Як датчик положення, встановленого на чотириланковий механізм, використаний прецизійний потенціометричний датчик з підвищеним терміном служби типу ПД-11. Опір датчика положення пропорційно куту згину. Для аварійної зупинки переміщення рухомої рами в двох її крайніх положеннях встановлюються два аварійних кінцевих вимикача, що забезпечують аварійне відключення електродвигуна. Кожен кінцевий вимикач зашунтований діодом, що забезпечує можливість руху каретки в протилежну сторону при спрацьовуванні кінцевого вимикача. Індикатор кута згинання 23 служить для візуального відображення поточного значення кута згинання і встановлених значень мінімального і максимального кутів згинання. Індикатором служить лінійна шкала, яка містить 40 керованих елементів відображення, що дозволяє візуально відображати поточне значення кута згинання з точністю, що не перевищує 3°. Поточне значення кута згинання відображається одним елементом, що світиться, переміщається зі швидкістю, пропорційною швидкості переміщення каретки між двома "упорами », які відображаються у вигляді світних зон на обох краях шкали. Регулятори 24-29, 34 дозволяють керувати наступними параметрами руху каретки приладу: - початковим положенням; - швидкістю переміщення (~0,5…2см/сек); - діапазоном переміщення (~ 0…110°); тривалістю зупинки (паузи) в крайніх положеннях (~ 0…60 сек). Апарат відновлення рухливості суглобів та стопи людини працює таким чином. Положення ноги пацієнта фіксується за допомогою ложемента гомілки 11 на рамі 2 пристрою і за допомогою ложемента стегна 12 на третій ланці 9 чотириланкових механізмів. За допомогою елементів фіксації (на фігурах не показані) опора для стопи 13, виконана з можливістю 2 UA 91635 U 5 10 15 20 25 30 35 40 45 50 55 60 обертання щодо осі 14, закріплюється в пазу рами 2. Здійснюють регулювання довжини других ланок 8 чотириланкових механізмів перестановкою шарніра, що з'єднує другу 8 і четверту 10 ланки, або зміною довжини коромисла 6, у разі виконання його телескопічним. Регуляторами встановлюють граничні значення кутів згинання і розгинання колінного суглобу, причому одне з цих значень може збігатися з початковим кутом, тобто кутом згину суглобу до його розробки на пристрої. Крім того, встановлюють початковий кут згинання, а також тривалість витримки при крайніх значеннях кутів згинання-розгинання і швидкість переміщення каретки. При включенні апарату обертання вала реверсивного електроприводу 3 через редуктор і муфту 17 передається гвинту 4 гвинтової пари. Гайка 5 гвинтової пари переміщається уздовж напрямної 16, передаючи зусилля руху на раму 2. Переміщення рами уздовж напрямної 16 викликає рух чотириланкового механізму і відповідно стегна пацієнта, закріпленого ложементом 12 до третіх ланок 9. Як вузол, що передає рух нозі пацієнта, вибрана передача "гвинт - гайка". Перевага такої конструкції має кілька аспектів. Така передача самогальмується, що особливо важливо для застосування при розробці суглобів ноги людини. Це означає, що у разі відмови або несправності якоїсь системи або вузла апарата, ложемент з розташованою на ньому кінцівкою залишиться в незмінному положенні. Таким чином, виключається можливість отримання хворим больового шоку. Подібна ситуація може виникнути і при раптовому відключенні електричного живлення апарата. Застосування передачі "гвинт-гайка" дозволяє виключити можливість поломки механізму приводу апарату хворим, чинити опір переміщенню ноги. У цьому випадку зусилля, що розвивається хворим, передаватиметься через каретку на основу, а більш чутливі елементи приводу (муфта, редуктор) залишаться розвантаженими, що запобіжить їхній поломці. У разі перевищення зусилля певного значення муфта 17 розмикається, запобігаючи поломці редуктора і електроприводу. Закріплення стегна пацієнта на третій ланці чотириланкового механізму дозволяє забезпечити обертання цієї ланки навколо уявної осі, що збігається з віссю тазостегнового суглоба пацієнта, і, таким чином, забезпечити поєднання природного руху стегна навколо своєї осі з рухом коромисел 6 навколо осі їх закріплення на нерухомій основі пристрою. Інформація про поточне значення кута згину надходить на вхід мікроконтролера у вигляді напруги з потенціометричного датчика положення 19. Ця інформація порівнюється із заданими параметрами руху, встановленими регуляторами 24-29, і використовується для вироблення сигналів, що надходять на вузол керування реверсивним електроприводом, забезпечуючи таким чином просте і легке управління відновленням рухливості суглобів людини. Виносний пульт екстреного відключення електроприводу дозволяє пацієнтові, при необхідності, самому зупинити електропривод. Таким чином, корисна модель дозволяє чуттєво розширити функціональні можливості і створити ефективний реабілітаційний апарат, що дозволяє одночасно розробляти колінний і тазостегновий суглоби і забезпечує легке і надійне управління процесом відновлення працездатності суглобів людини. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Апарат відновлення рухливості колінного, тазостегнового суглобів та стопи людини, що містить нерухому основу, раму, реверсивний електропривод, з'єднаний з гвинтовою парою у вигляді ходового гвинта і гайки, коромисла, шарнірно закріплені на підставі, трансмісію, два ложементи й опору для стопи, мікроконтролер, датчик положення, кінцеві вимикачі і вузол управління реверсивним електроприводом, трансмісія виконана у вигляді двох зв'язаних паралельно розташованих чотириланкових механізмів, причому коромисла жорстко пов'язані з другими ланками чотириланкових механізмів, суміжних з першими ланками, ложемент гомілки закріплений на рамі, ложемент стегна закріплений на третій ланці, суміжній з першими ланками і пов'язаних через четверту ланку з другими ланками, рама шарнірно пов'язана з кареткою, в пазу якої розташована гайка гвинтової пари з можливістю її переміщення в радіальному напрямку щодо осі ходового гвинта, на основі встановлені кінцеві вимикачі, що фіксують крайні положення каретки, на чотириланковий механізм встановлений датчик положення, мікроконтролер пов'язаний з вузлом управління реверсивним електроприводом, вихід якого з'єднаний з реверсивним електроприводом, а кінцеві вимикачі пов'язані з мікроконтролером, в панелі управління розташовані електрично пов'язані з мікроконтролером індикатор поточного значення кута згинання і встановлених значень мінімального і максимального кутів згинання, регулятор мінімального кута згинання, регулятор максимального кута згинання, регулятор витримки при мінімальному куті згинання, регулятор витримки при максимальному куті згинання, регулятор швидкості зміни кута згинання і регулятор початкової установки кута 3 UA 91635 U 5 згинання, причому апарат містить виносний пульт екстреного відключення електроприводу, з'єднаний з мікроконтролером, який відрізняється тим, що додатково містить другий датчик положення, встановлений біля опори стопи і з'єднаний з мікроконтролером, динамометричний блок переміщень стопи, п'єзодвигун, персональний комп'ютер, блок сигналізації, причому динамометричний блок переміщень стопи з'єднаний з опорою стопи та п'єзодвигуном, що під'єднаний до мікроконтролера, а він підключений до персонального комп'ютера і блока сигналізації. Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюRumbeshta Valentyn Oleksandrovych, Filippova Maryna Viacheslavivna
Автори російськоюРумбешта Валентин Александрович, Филиппова Марина Вячеславовна
МПК / Мітки
МПК: A61H 1/02
Мітки: стопи, відновлення, апарат, колінного, рухливості, тазостегнового, суглобів, людини
Код посилання
<a href="https://ua.patents.su/6-91635-aparat-vidnovlennya-rukhlivosti-kolinnogo-tazostegnovogo-suglobiv-ta-stopi-lyudini.html" target="_blank" rel="follow" title="База патентів України">Апарат відновлення рухливості колінного, тазостегнового суглобів та стопи людини</a>
Тренажер для розробки рухливості колінного та тазостегнового суглобів
Номер патенту: 5622
Опубліковано: 15.03.2005
Автор: Мартинов В'ячеслав Васильович
МПК: A61H 1/02
Мітки: тазостегнового, розробки, суглобів, колінного, рухливості, тренажер
Формула / Реферат:
1. Тренажер для розробки рухливості колінного та тазостегнового суглобів, що містить сидіння, гнучкий важіль з опорою для розташування на ній стопи ноги пацієнта, а також пристрій для формування дозованого навантаження, який відрізняється тим, що пристрій для формування дозованого навантаження складається з повітряної ємкості, один кінець якої з'єднаний з жорстким повітропроводом за допомогою гнучкого повітропроводу, а другий безпосередньо...
Спосіб відновлення активного розгинання стопи при незворотних ушкодженнях малогомілкового нерва або м`язів розгиначів стопи
Номер патенту: 55403
Опубліковано: 10.12.2010
Автори: Долгополов Олексій Вікторович, Гайович Василь Васильович, Страфун Сергій Семенович
МПК: A61B 17/56, A61B 17/00
Мітки: нерва, активного, стопи, розгиначів, відновлення, м'язів, ушкодженнях, розгинання, незворотних, малогомілкового, спосіб
Формула / Реферат:
Спосіб відновлення активного розгинання стопи при незворотних ушкодженнях малогомілкового нерва або м'язів розгиначів стопи, що передбачає відсічення заднього великогомілкового м'яза та його транспозицію через міжкісткову мембрану в нижній третині гомілки на тил стопи, який відрізняється тим, що транспонований сухожилок заднього великогомілкового м'яза фіксують до сухожилка переднього великогомілкового м'яза, відсіченого у місці...
Спосіб відновлення активного розгинання стопи та пальців при незворотних ушкодженнях малогомілкового нерва або м’язів розгиначів стопи та пальців

Номер патенту: 24724
Опубліковано: 10.07.2007
Автори: Гайович Василь Васильович, Страфун Сергій Семенович, Курінний Ігор Миколайович
МПК: A61B 17/00
Мітки: м'язів, активного, розгиначів, відновлення, розгинання, незворотних, спосіб, нерва, стопи, малогомілкового, пальців, ушкодженнях
Формула / Реферат:
Спосіб відновлення активного розгинання стопи та пальців при незворотних ушкодженнях малогомілкового нерва або м'язів розгиначів стопи та пальців, що включає транспозицію заднього великогомілкового м'яза на тил стопи, який відрізняється тим, що транспонований сухожилок з однаковим натягом фіксують на рівні тилу стопи до сухожилків розгиначів 1-5 пальців.
Спосіб вимірювання стопи людини
Номер патенту: 53179
Опубліковано: 27.09.2010
Автори: Коновал Віктор Павлович, Омельченко Надія Миколаївна, Скідан Владислава Валентинівна
МПК: A43D 1/00
Мітки: вимірювання, спосіб, людини, стопи
Формула / Реферат:
Спосіб вимірювання стопи людини, при якому кожну стопу встановлюють на опорну поверхню вимірювального інструмента та отримують відбиток стопи на папері, який відрізняється тим, що як вимірювальний інструмент використовують сканер, при цьому кожну стопу почергово встановлюють на верхню його опорну поверхню паралельно опорі, на однаковій з нею висоті, сканують, а перед отриманням відбитка на папері переносять на екран монітора комп'ютера за...
Спосіб лікування ялівцем запалення суглобів стопи і гомілковостопного суглоба
Номер патенту: 62630
Опубліковано: 12.09.2011
Автори: Коломієць Віктор Іванович, Брежнєва Олена Борисівна, Любова Ганна Володимирівна
МПК: A61F 5/00
Мітки: запалення, суглобів, ялівцем, лікування, гомілковостопного, суглоба, стопи, спосіб
Формула / Реферат:
Спосіб лікування ялівцем запалення суглобів стопи і гомілковостопного суглоба, який відрізняється тим, що ялівець подрібнюють до тирсоподібного стану і наповнюють чобіт, який надягають на уражені суглоби, причому чобіт має регульовану застібку.
Попередній патент: Пристрій для масажу щічних м’язів
Наступний патент: Лужний цемент для бетонів і будівельних розчинів
Випадковий патент: Радіоелектронний блок