Транспортний засіб, що приводиться в дію мускульною силою людини
Номер патенту: 9859
Опубліковано: 30.09.1996
Автори: Ільчишина Світлана Валентинівна, Мосевич Едуард Владиславович, Хоптинець Борис Миколайович, Навроцька Нінель Валентинівна, Зорін Олєг Даніловіч

Формула / Реферат
(57) Транспортное средство, приводимое в действие мускульной силой человека, содержащее переднее ведомое колесо, руль для его управления, раму с задним ведущим колесом, седло, правый и левый приводные рычаги с педалями и устройство приведение в действие, и механизм переключения скорости, отличающееся тем, что устройство приведения в действие выполнено в виде двух симметрично расположенных относительно продольной оси транспортного средства идентичных кинематических частей, каждая из которых снабжена водилом трехступенчатого планетарного механизма, выполненного из двух взаимно перемещающихся частей с оппозитно расположенными сателлитами-блоками шестерен и набора из трех ведомых шесторен, являющихся составной частью механизма вытяжной шпонки и одновременно ведущей частью храпового механизма, расположенного в ступице ведущего колеса, а подвижная корончатая шестерня планетарного механизма сопряжена через зубчатое колесо, ось которого жестко связана с корпусом планетарного механизма, с зубчатым сектором базовой части водила, ось качания правого и левого приводных рычагов совладаете осью ведущего колеса, при этом каждый приводной рычаг жестко соединен с базовой частью водила и посредством тросовой оттяжки, расположенной в плоскости, не перпендикулярной оси ведущего колоса, соединен с подвижной серьгой водила, причем приводные рычаги снабжены кронштейнами с направляющими роликами, размещенными в направляющей каждого рычага, и оба рычага уравновешены с помощью тросовой связи, соединяющей между собой кронштейны направляющих роликов через блок, ось которого неподвижно закреплена на раме транспортного средства, а механизм вытяжной шпонки управляющим тросом механически соединен с механизмом переключения скоростей, имеющим три фиксированных положения рычага переключения скоростей и расположенным на примыкающей к рулевой колонке связи раме.
Текст
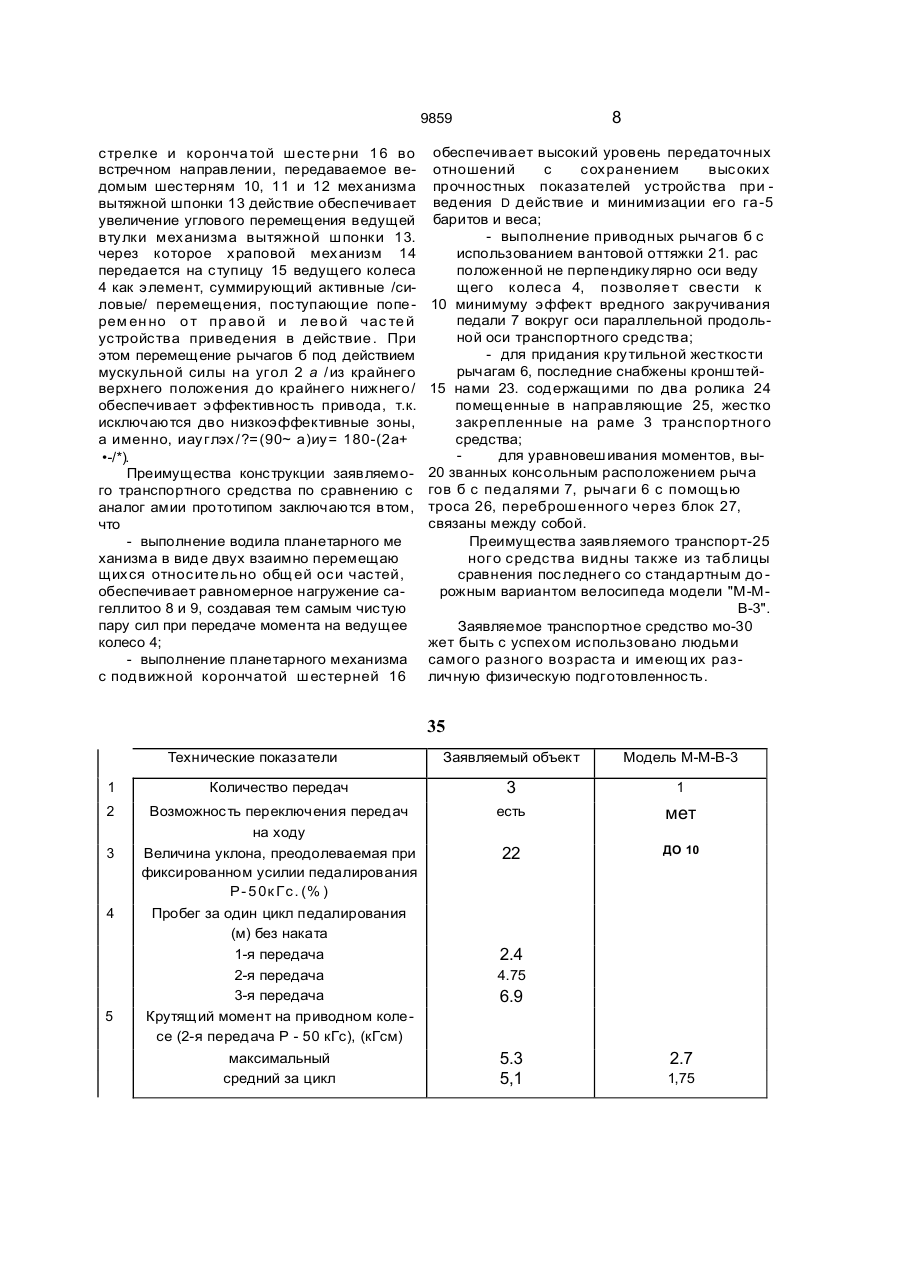
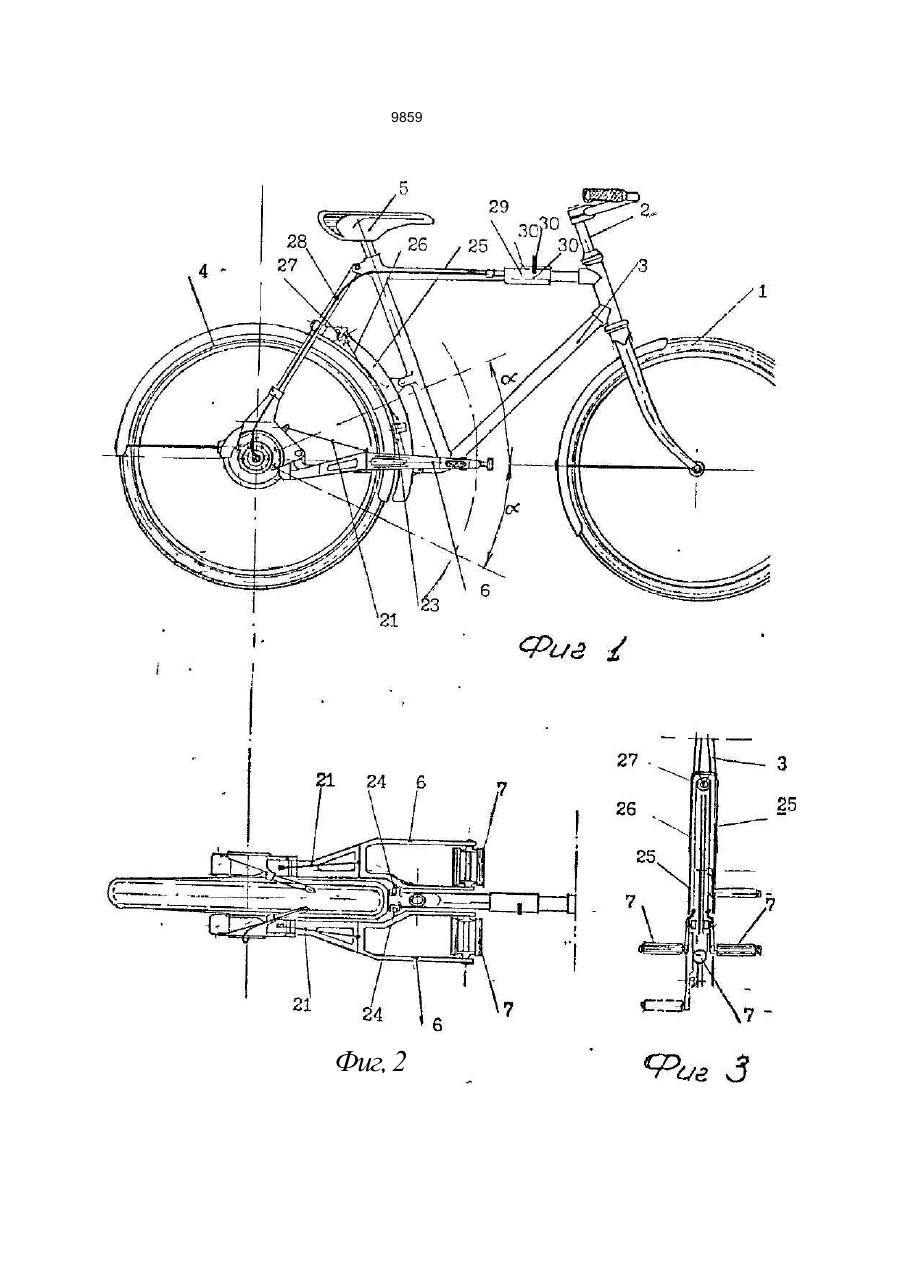
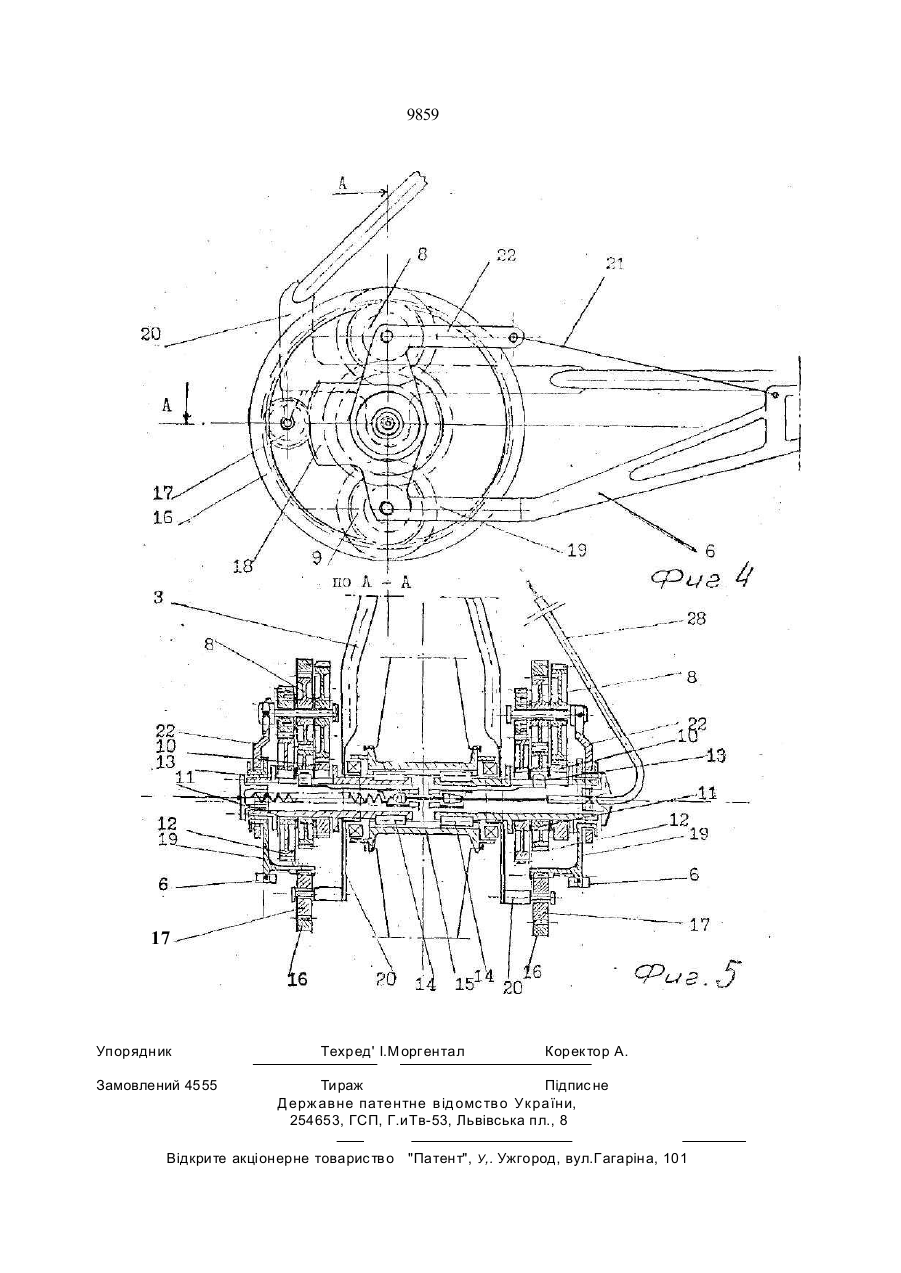
Транс портное средс тво, привод имое в дейс твие мус ку льной с илоЛ человек а, с о держащее перед нее ведомое колесо, ру ль для его управления, раму с задним ведущим колес ом, седло, правый и левый приводные рычаги с педалями и устройс тво пріте&сніля в действие, и механизм перекдгочс-нмя ско рос ти, о т л и ч а ю щ е е с я тем, что устройс тво приведения в дейс твие выпол нено в виде двух симметрично располокйнных относ и тель но прод оль но й ос и транспортного средс тва ид ентичных кине матических частей, каждая из которых снабжена всд илом трехс ту пенчатого планетарного мех анизма, выполненног о из д ву х взаі і/.чо перемещающихся час тей с оппозитно расположенными сателлитами-блоками ш ес терен и набора из трех вед омых шес торен, являющ ихс я сос тавной час тью мех анизма вытяж ной шпонки и од новременно ведущей час тью храпового мех аниз ма, рас положенного в с тупице ведущ его колеса, а под вижная корончатая ш ес терня планетарного мех анизма с опряжена через зу5чатое колесо, ось которого жес тко связана с корпус ом планетарного мех анизма, с зубчатым с ектором базовой час ти водила, ось качания правого и левого привод ных рычагов совлад аете осью ведущего колес а, при э том кажд ый привод ной рычаг жес тко соединен с базовой час тью водила и посредством трос овой оттяжки, рас положенной в плос кос ти, не перпенд ику лярной ос и веду щего колоса, соединен с подвижной серьгой вод ила, причем привод ные рычаги снабжены кронш тейнами с направляющи? ш роликами, размещ енным и в напр авляю щ ей каждого рычага, и оба рычага уравновешены с помощью трос овой связи, с оед иняющей между собой кронш тейны направляющ их роликов через блок, ось которого неподвиж но закреплена на раме транспортного сред с тв а, а м ех ан и зм в ы тя жн о й ш п о нк и управляющим трос ом мех анически с оед инен с механизмом переключения скорос тей, имеющим три фикс ированных положения рычага переключения скорос тей и расположенным на примыкающей к рулевой колонке связи раме. С > ел 9859 Изобретение относ итс я к устройс твам для приведения а дейс твие транспортных средств мускульной силой человека, например велосипедов, веломобилей и т.п. Широко извес тны конс трукции транс портных средств, в час тнос ти велосипеды, в которых механизмы приведения в действие использу ют цепь и цепноо колес о с таким размещением пед алей, которое требу ет полного вращательного движения цепного колес а. В таких устройствах впустую теряется значительная час ть энергии, когда направление приложения усилия на педаль совпадает либо близко к направлению ос и кривошипа педали. Кроме э того, велика уязвимос ть механизма переключения цепных передач при движениЕі транспортного средства в связи с внешним размещением его исполнительной час ти, а также извес тные неудобс тва, связанные с защитой од ежд ы езд ока от возможного наматывания ее на цепную перед ачу [1]. Извес тен также велосипед с задним колесом, приводимым в действие педальными рычагами. Еелос ипед привод ится в движение качающимис я педальными рычагами, задние плечи которых снабжены зубчатыми сегментами, нах одящ имися в зацеплении с шестернями, соед иненными с зад ним колесом через му фту свободного хода. Благодаря этому перемещение каждого рычага вниз перед ается колесу, обеспеч ивая его привод. Рычаги взаимосвязаны д ля согласованного вращения на одинаковую величину в противоположных направлениях с помощью шестер ни, прикрепл енной к вращ ающ ейс я гильзе, к которой прикреплена также ш ес терня, находящаяс я в зацеплении с дополнительным зу бчатым сегментом на заднем, плече кажд ого рычага. Шес терни расположены между перьями задней вилки велосипеда [2]. Недос татки у помяну той конс тру кции велос ипеда заключаются в том, что она не позволяет ПОБЬСИТЬ коэ ффициент полезного дейс твия транспортного средс тва, требует высоких э нергозатрат велос ипед ис та на выполнение работы по приведению велосипеда в действие. Наиболее'близким по технической сущ нос ти к заявляемому устройс тву является конс трукция велосипед а, имеющего переднее ведомое колесо, руль для его управления, раму с заді іим ведущим колесом, седло, правый и левый приводные рычаги с педалями и устройс тво приведения вдейс тоие, и механизм переключения скорос ти. Ус тройство приведения в движение включает втулку для ведущего колеса, предс тавляющую цилинд рическую поверхнос ть, право- и ле вос тороннее устройс тво передачи кру тящ его момента в сочетании с упомянутое» вту лк ой, в а л, пр ик ре п ле нн ы й к р ам е и тянущийся через ус тройс тво кру тящ его мо5 мента, с редс тва поддержки его на валу д ля вращения относительно вала и относительно д руг друга; каждое устройс тво передачи кру тящ его момента имеет рукав, один край которого наход ится на вту лке, а второй край 10 выход ит из нее; средс тва смещения ролика в прос транс тво между скатом и цилинд ричес кой поверх нос тью при вращательном движении по часовой стрелке, пружины д ля смещ ения рукава и направления вращ ения 15 в противоположную сторону, право- и левос торонние э лементы гибкого натяжения, один конец кажд ого из которых прикреплен к каждому рукаву за пред елами вту лки; второй конец, удаленный от первого, предназ20 наченный для альтернативного приложения напряжения к с оответс тву ющ им гибким элементам в направлении, противоположном движению упомяну тых пружин; пос ледние включают правые и левые плечи рычага* 25 ус тановленные на од ном краю д ля осевого вращения по отношению к раме; свободные края рычагов свободны длп приведения их в движение езд оком, средс тва с оед инения другого конца соответс твующих элементов 30 гибкого натяж ения к с оответс твующим плечам рычага, такое соединение может регулиров а тьс я так им о бр аз ом, что м ес то соед инения указанного другого конца к соответс тву ющему плечу рычага может ме35 пяться с тем, чтобы варьировать увеличение силы [3]. Нед ос татки конс трукции прототипа за-' ключаются в том, что она имеет низкий коэ ффициент полезного дейс твия, связанный АО с некомпенс ированной реакцией от тягового усилия; в ней отсу тс тву ет чис тая пара сил при перед аче крутящ его момента на ведущее колесо, требуютс я большие энергозатраты езд ока на привед ение в д ейс твие 45 транспортного с редс тва за счет неэ ффективнос ти педалирования, что затруд няет его ис пользование людьми самого разного возрас та и имеющ их различную физическую подготовку. 50 Нас тоящ им изобретением реш ена зад ача снижения энергозатрат езд ока за счет повышения э ффективнос ти привода пу тем исключения низкоэ ффективной зоны в ак тивном цикле педалирования и создания чи55 с той пары с ил при перед аче кру тящего момента ка ведущее колесо. Задача решается тем, что в мускульном транспортном средс тве, включающем переднее ведомое колесо, руль для его управления, раму с задним ведущим колесом, седло, 9G59 правый и лезый привод ные рычаги с педалями и ус тройс тво привед ения в дейс твие, и механизм переключения скорос ти, соглас но изобретению, ус тройс тво привед ения в д ействие выполнено в вид е двух с имметрично 5 рас положенных относ ительно прод ольной оси транспортного средс тва ид ентичных кинематичес ких час тей, кажд ая из которых снабжена водилом трехс тупенчатого планетарного механизма, выполненного из д вух 10 взаимно перемещ ающ ихс я час тей с оппозитно расположенными сателлитами-блоками ш ес тер ен и на бо ра из трех вед ом ых ш ес терен являющ ихс я с ос тавной час тью мех анизма вытяж ной ш понки и од новре- 15 менно ведущей час тью х рапового механизма, рас положенног о в с ту пице ведущ его колес а, а подвижная корончатая ш ес терня планетарного механизма с опряжена через зубчатое колесо, ось которого жес тко связа- 20 на с корпус ом планетарного мех анизма, с зу бчатым с ектором базовой час ти вод ила, ос ь качания правого и левого привод ных рычагоо совпад ает с осью ведущего колеса, при э том кажд ый приводной рычаг жес тко 25 соединен с базовой частью водила и пос редс твом трос овой оттяжки, рас положенной в плос кос ти, не перпенд ику лярной ос и веду щего колёса, соединен с под вижной серьгой водила, причем привод ные рычаги снабже- 30 ны кронш тейнами с направляющими роликами, размещ енными в направляю щ ей каждого рычага и оба рычага уравновешены с помощью тросс овой связи, с оединяющей между с обой кронш тейны направляющ их 35 роликов через блок, ось которого неподвижно закреплена на раме транс портного сред с тва, а м ех ан из м вы тяж н ой ш по нк и у правляющ им трос ом мех анически с оед и-неї; с механизмом переключения скорос тей, 40 имеющ ем три фикс ирооаиных полож ения рычага переключения скорос тей и расположенного на примыкдпщей к ру левой колонке связи рамы. Изобретение пояс няетс я чертежами, 45 где на фиг. 1 предс тавлен общий пил трзмспортмою средс тпа, привод имого о дейс твие муску льной с илой человека, на фиг. 2 - вид сверху фиг. 1; на фиг.З-устройс тво взмтооогоуравновеш ивания привод ных ричагоч; на 50 фиг. 4-планетарный трехс тупенчатый механизм; на фиг. 5 - разрез по А -А ус тройс тва фиг.4 в плоскос тях, с од ержащих ось вед у щего колеса. Транс портное с редс тво, привод имое а 55 действие мускульной силой чеповакз сос тоит из переднего ведомого колеса 1, рулл д ля его управления 2, рамы 3 с зад ним оедущим колесом 4, седла 5, правого и левого приводных рычзгов 6 с пед алями 7 иа одном конце рычагов и у с тройс тва привед ения з д ейс твие, которое выполнено в вид е д вух ид ентич ных к инематич ес к их ч ас тей, симметрично расположенных относ ительно прод ольной ос и транс портного с ред с тва. Кажд ая кинематическая час ть с одержит водило трехс ту пенчатого планетарного мех анизма. В од ило имеет оппознтн о рас положенные сателлиты-блоки шес терен 8 и 9 и набор из трех вед омых шес терен 10, 11 и 12, находящ ихся в зацеплении с указанными блоками. Последние являю тс я сос тавной час тью механизма вытяжной шпанки 13 и од новременно ведущей час тью храпового механизма 14, который расположен в с тупице 15 ведущего колеса 4. Подвижная корончатая шес терня 16 планетарного мех анизма сопряжена через зу бчатое колес о 17 с зу бчатым сектором 18 базовой час ти 19 водила. Ос ь зу бчатого колес а 17 жес тко связана с корпусом 20 планетарного мех анизма. Ось качания правого и левого привод ных рыча-гов б с овпад ает с осью ведущего колеса 4. К ажд ый привод ной рычаг G жес тко с оед инен с базовой час тью 19 водила и байтовой троссовой оттяжкой 2 1с под вижной с ерьгой 22 вод ила. Тросовая оттяжка 21 размещена в плоскос ти, не перпенд икулярной ос и веду щего колеса 4. Приаод ные рычаги 6 имеют кронш тейны 23 с направляющими роликами 24, которые размещены в направляющей 25 каждого рычага 6. Пос лед ние у равновешены трос овой связью 26, которой с оединены между собой кронш тейны 23 приводных рычагов 6 через блок 27, ось которого непод вижно зак реп л ена н а ра ме 3. Мех а низм вытяж ной шпонки 13 управляющим трос ом 28 с оед инен с мех анизмом перек лючения скорос тей 29, который расположен на примыкающей к ру левой колонке /ру лю/ 2 с вязи р ам ы 3. Мех ан из м п ер ек лю ч ен ия скорос тей 29 имеет три фиксированных положения рычага 30, 30' и 30", с оответс твенно, переключения скорос тей. Транспортное средс тво работает следующ им образом. Мускульное усилие, сообщаемое с ту пней ездока, через пед али 7 передается правому или левому привод ному рычагу 6. Основание рычага 6 с помощью опорной площадки и вэ нтовой оттяжки 21 передает развиваемый момент на вод ило планетарного мех анизма. При э том зу бчатый сектор 18 базовой части 19 водила сообщает через шес терню 17 вс тречное д аижзнпо по направлению перемещ ения корончатой ш ес терни 16, В резу льтате с ложения д ву х противоположно направленных вращатель ных перемещений, а именно: движение ос и сателлитов блока шестерен 8 и 9 по часовой 8 9859 стрелке и коронча той шесте рни 1 6 во встречном направлении, передаваемое ведомым шестерням 10, 11 и 12 механизма вытяжной шпонки 13 действие обеспечивает увеличение углового перемещения ведущей втулки механизма вытяжной шпонки 13. через которое храповой механизм 14 передается на ступицу 15 ведущего колеса 4 как элемент, суммирующий активные /силовые/ перемещения, поступающие поперем ен но о т пр аво й и ле во й час те й устройства приведения в действие. При этом перемещение рычагов б под действием мускульной силы на угол 2 а /из крайнего верхнего положения до крайнего нижнего/ обеспечивает эффективность привода, т.к. исключаются дво низкоэффективные зоны, а именно, иауглэх/?=(90~ а)иу= 180-(2а+ •-/*). Преимущества конструкции заявляемого транспортного средства по сравнению с аналог амии прототипом заключаются втом, что - выполнение водила планетарного ме ханизма в виде двух взаимно перемещаю щихся относите льно общ ей оси частей, обеспечивает равномерное нагружение сагеллитоо 8 и 9, создавая тем самым чистую пару сил при передаче момента на ведущее колесо 4; - выполнение планетарного механизма с подвижной корончатой шестерней 16 обеспечивает высокий уровень передаточных отношений с сохранением высоких прочностных показателей устройства при ведения D действие и минимизации его га-5 баритов и веса; - выполнение приводных рычагов б с использованием вантовой оттяжки 21. рас положенной не перпендикулярно оси веду щего колеса 4, позволяе т свести к 10 минимуму эффект вредного закручивания педали 7 вокруг оси параллельной продольной оси транспортного средства; - для придания крутильной жесткости рычагам 6, последние снабжены кронштей15 нами 23. содержащими по два ролика 24 помещенные в направляющие 25, жестко закрепленные на раме 3 транспортного средства; для уравновешивания моментов, вы20 званных консольным расположением рыча гов б с педалями 7, рычаги 6 с помощью троса 26, переброшенного через блок 27, связаны между собой. Преимущества заявляемого транспорт-25 ного средства видны также из таблицы сравнения пос леднего со стандартным до рожным вариантом велосипеда модели "М-МВ-3". Заявляемое транспортное средство мо-30 жет быть с успехом использовано людьми самого разного возраста и имеющ их различную физическую подготовленность. 35 Технические показатели Заявляемый объект Модель М-М-В-3 1 Количество передач 3 1 2 Возможность переключения передач на ходу Величина уклона, преодолеваемая при фиксированном усилии педалирования Р- 5 0к Гс. (% ) Пробег за один цикл педалирования (м) без наката 1-я передача 2-я передача 3-я передача Крутящий момент на приводном колесе (2-я передача Р - 50 кГс), (кГсм) максимальный средний за цикл есть мет 22 ДО 10 3 4 5 2.4 4.75 6.9 5.3 5,1 2.7 1,75 9859 Фиг, 2 9859 17 Упорядник Замовлений 4555 Техред' І.Моргентал Коректор А. Тираж Підпис не Державне патентне від омс тво України, 254653, ГСП, Г.иТв-53, Львівська пл., 8 Відкрите акціонерне товарис тво "Патент", У,. Ужгород, вул.Гагаріна, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюTransport vehicle actuated by muscular force of a man
Автори англійськоюZorin Olieh Danilovich, Mosevych Eduard Vladyslavovych, Il'chyshyna Svitlana Valentynivna, Khoptynets Borys Mykolaiovych
Назва патенту російськоюТранспортное средство, приводимое в действие мускульной силой человека
Автори російськоюЗорин Олег Данилович, Мосевич Эдуард Владиславович, Ильчишина Светлана Валентиновна, Хоптинец Борис Николаевич
МПК / Мітки
МПК: B62M 1/00
Мітки: силою, дію, людини, приводиться, транспортний, мускульною, засіб
Код посилання
<a href="https://ua.patents.su/6-9859-transportnijj-zasib-shho-privoditsya-v-diyu-muskulnoyu-siloyu-lyudini.html" target="_blank" rel="follow" title="База патентів України">Транспортний засіб, що приводиться в дію мускульною силою людини</a>
Підлоговий чотирьохколісний транспортний засіб

Номер патенту: 2507
Опубліковано: 26.12.1994
Автори: Субботін Юрій Петрович, Шнейдер Володимир Львович, Кохан Іван Михайлович, Володарський Віктор Тимофійович, Самонін Анатолій Васильович, Гренадер Михайло Юхимович
МПК: B62D 7/14
Мітки: чотирьохколісний, підлоговий, засіб, транспортний
Формула / Реферат:
1. Напольное четырехколесное транспортное средство, содержащее все управляемые колеса, кинематически попарно связанные между собой, по крайней мере, два из которых ведущие, блок управления с переключателем направления движения, связанный через исполнительный механизм с каждой парой управляемых колес, и элементы согласования поворота управляемых колес разных пар, отличающийся тем, что между собой попарно связаны управляемые колеса одного...
Транспортний засіб

Номер патенту: 193
Опубліковано: 30.04.1993
Автори: Стешенко Володимир Петрович, Баранов Олександр Андрійович, Гончаров Микола Іванович, Папашев Олег Хайрулович
МПК: B62D 43/00, B62D 25/08
Мітки: засіб, транспортний
Формула / Реферат:
Формула изобретения1. Транспортное средство, содержащее кузов, разделенный перегородками на пассажирский, багажный и моторные отсеки, последний из которых образован поперечной и фронтальной панелями, боковинами кузова, его днищем и капотом, образующим с боковыми и фронтальной панелями соответственно боковые и фронтальную линии разъема, при этом в моторном отсеке размещены поперечно расположенный силовой агрегат и горизонтально...
Транспортний засіб

Номер патенту: 225
Опубліковано: 30.04.1993
Автори: Графська Олена Миколаївна, Майдачевський Юрій Петрович, Соколов Сергій Іванович
МПК: B62D 25/08, B60R 21/00, B62D 43/00
Мітки: засіб, транспортний
Формула / Реферат:
Формула изобретения1. Способ получения материала для дренажа мембранного газоразделительного элемента путем пропитки трикотажного полотна полиэтилентерефталатных нитей составом на основе термореактивной смолы, катализатора отверждения и воды, отличающийся тем, что, с целью повышения его производительности продольной газопроницаемости, трикотажное полотно выполняют переплетение - сукно-цепочка-сукно, а пропитку осуществляют составом,...
Автоматичний підлоговий транспортний засіб

Номер патенту: 176
Опубліковано: 30.04.1993
Автори: Володарський Віктор Тимофійович, Орлов Борис Арсентьович, Бобиляк Микола Васильович, Гренадер Михайло Юхимович
МПК: B60K 31/00
Мітки: підлоговий, транспортний, засіб, автоматичний
Формула / Реферат:
Ф о р м у л а и з о б р е т е н и я 1. Автоматическое напольное транспортное средство, содержащее ведущие и ведомые колеса, одни из которых, расположенные по одному из бортов, имеют общий привод поворота, один из блоков для считывания сигналов путевых меток, подключенный выходом к одному из входов дешифратора, датчики углов поворота колес и формирователь управляющих сигналов приводами ведущих колес, о т л и ч а ю щ е е с я тем, что,...
Транспортний засіб

Номер патенту: 2883
Опубліковано: 26.12.1994
Автори: Нестеренко Антолій Митрофанович, Д'яконов Павло Павлович, Нестеровський Валентин Григорович, Зуєв Микола Данилович
Мітки: транспортний, засіб
Формула / Реферат:
Транспортное средство, содержащее смонтированные на шасси поворотный в вертикальной плоскости кузов, оборудованный шнековым конвейером с приводом от гидромотора, гидроподъемник кузова, гидронасос для подачи жидкости в гидромотор и гидроподъемник, основной гидрораспределитель, сообщенный с гидроподъемником и с со сливом, отличающееся тем, что средство снабжено дополнительным двухпозиционным трехлинейным гидрораспределителем с подпружиненным...
Попередній патент: Пристрій для об’єднання лексичних множин
Наступний патент: Спосіб видобування галію із маточних та оборотних розчинів процесу байєра
Випадковий патент: Пристрій для остеосинтезу переломів проксимального відділу стегна