Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 98665
Опубліковано: 12.05.2015
Автори: Дроговоз Володимир Ігорович, Бандура Іван Миколайович


Формула / Реферат
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості, навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування повздовжньої кутової швидкості визначають момент початку демпфірування повздовжньої кутової швидкості за умови збігу напрямку вектора поперечної кутової швидкості з напрямком однієї з поперечних осей після демпфірування повздовжньої кутової швидкості, забезпечують демпфірування повздовжньої кутової швидкості за рахунок включення керуючих двигунів у повздовжньому каналі, потім включають двигуни, що створюють керуючий момент навколо поперечної осі, напрямок якої збігається з напрямком вектора поперечної кутової швидкості, чим забезпечують демпфірування поперечних кутових швидкостей, який відрізняється тим, що на початку режиму демпфірування діагностують працездатність датчика повздовжньої кутової швидкості і в разі його відмови визначають повздовжню кутову швидкість в залежності від швидкості повороту вектора поперечної кутової швидкості, а також визначають час гасіння повздовжньої кутової швидкості.
Текст
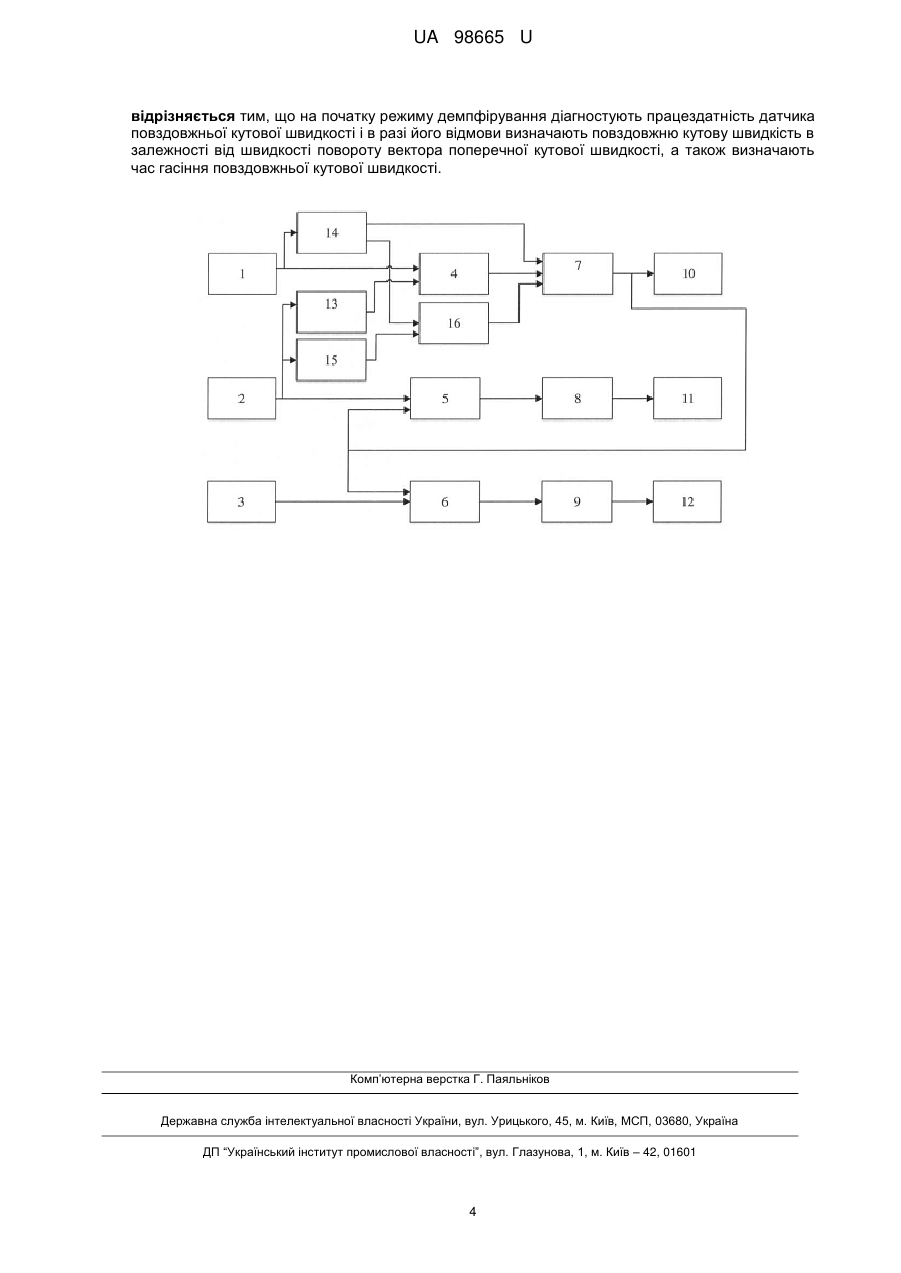
Реферат: UA 98665 U UA 98665 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі - космонавтика. Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата з реактивними виконавчими органами по трьох осях належить до систем орієнтації і кутової стабілізації космічного літального апарата. Відомий спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата [див. Разыграев А.П. Основы управления полетом космических аппаратов и кораблей. - М.: Машиностроение, 1977. - С.120-127], який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, забезпечують одночасне демпфірування кутових швидкостей навколо трьох осей за рахунок одночасного включення керуючих двигунів у всіх каналах Недоліками даного способу є низька надійність і велика витрата робочого тіла для демпфірування кутових швидкостей. Відомий спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата, узятий як прототип [див. Патент України на корисну модель №1188, B64G1/24,2006р, опубл. в бюл. №1], який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування повздовжньої кутової швидкості визначають момент початку демпфірування повздовжньої кутової швидкості за умови збігу напрямку вектора поперечної кутової швидкості з напрямком однієї з поперечних осей після демпфірування повздовжньої кутової швидкості, забезпечують демпфірування повздовжньої кутової швидкості за рахунок включення керуючих двигунів у повздовжньому каналі, потім включають двигуни, що створюють керуючий момент навколо поперечної осі, напрямок якої збігається з напрямком вектора поперечної кутової швидкості, чим забезпечують демпфірування поперечних кутових швидкостей. Недоліком цього способу є низька надійність через непрацездатність при наявності відмови датчика повздовжньої кутової швидкості. В основу корисної моделі поставлено задачу підвищення надійності за рахунок забезпечення працездатності шляхом побічного визначення повздовжньої кутової швидкості при відмові датчика повздовжньої кутової швидкості. Поставлена задача вирішується тим, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування повздовжньої кутової швидкості визначають момент початку демпфірування повздовжньої кутової швидкості за умови збігу напрямку вектора поперечної кутової швидкості з напрямком однієї з поперечних осей після демпфірування повздовжньої кутової швидкості, забезпечують демпфірування повздовжньої кутової швидкості за рахунок включення керуючих двигунів у повздовжньому каналі, потім включають двигуни, що створюють керуючий момент навколо поперечної осі, напрямок якої збігається з напрямком вектора поперечної кутової швидкості, чим забезпечують демпфірування поперечних кутових швидкостей. Згідно з корисною моделлю на початку режиму демпфірування діагностують працездатність датчика повздовжньої кутової швидкості і в разі його відмови визначають повздовжню кутову швидкість в залежності від швидкості повороту вектора поперечної кутової швидкості, а також визначають час гасіння повздовжньої кутової швидкості Суть корисної моделі пояснюється кресленням, де представлена структурна схема системи демпфірування кутових швидкостей космічного літального апарата з реактивними виконавчими органами, яка реалізує запропонований спосіб. Система містить датчик повздовжньої кутової швидкості 1, датчик першої поперечної кутової швидкості 2, датчик другої поперечної кутової швидкості 3, блок 4 підключення датчика 1, блок 5 підключення датчика 2, блок 6 підключення датчика 3, блок 7 керування виконавчими органами повздовжнього каналу, блок 8 керування виконавчими органами першого поперечного каналу, блок 9 керування виконавчими органами другого поперечного каналу, виконавчі органи повздовжнього каналу 10, виконавчі органи першого поперечного каналу 11, виконавчі органи другого поперечного каналу 12, блок 13 визначення початку демпфірування повздовжньої швидкості, блок 14 діагностики датчика повздовжньої кутової швидкості, блок 15 визначення повздовжньої кутової швидкості, блок 16 визначення часу гасіння повздовжньої кутової швидкості. Після відділення космічного апарата від носія виникають початкові кутові швидкості, які необхідно демпфірувати. Запропонований спосіб дозволяє вирішити цю задачу, забезпечуючи високу надійність і мінімізацію витрат робочого тіла. 1 UA 98665 U Рівняння руху для вісесиметричного космічного апарата в зв'язаній системі координат OXYZ (приймемо, що віссю симетрії є вісь X) записуються в наступному вигляді (збурюючи моменти передбачаються малими і не враховуються) [див. Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами. - М.: Машиностроение, 1974. - 340с.]: 5 x m x ; y a z x m y ; (1) z a y x m z , де 10 x , y , z - проекції кутової швидкості космічного апарата на осі зв'язаної системи координат: x - подовжня кутова швидкість; y - перша поперечна кутова швидкість; z - друга поперечна кутова швидкість; m x , m y , m z - проекції приведеного керуючого моменту; a 0 - константа. 15 Вважаємо, що в початковий момент часу складові кутової швидкості задовольняють співвідношенню i 0 , (i XYZ ) . Знайдемо вільний рух апарата шляхом інтегрування системи (1) при m i 0 , де: x x 0 ; y r0 sin ; (2) 20 z r0 cos ; де r0 2 0 2 0 - модуль поперечної кутової швидкості; Y Z Y0 - кут між напрямком поперечної кутової швидкості і віссю Z . Z0 Швидкість зміни кута визначається як a x 0 . a x 0 t arctg 25 Звідки знаходимо співвідношення для визначення початкової подовжньої кутової швидкості x 0 без використання інформації з датчика кутової швидкості: x 0 (3) . a При вільному русі апарата заданого інтервалу: 30 де: знаходимо за рахунок визначення кута на початку і в кінці k n , Т зад n і k - значення кута a на початку і в кінці заданого інтервалу, відповідно Т зад - подовженість заданого інтервалу Для гасіння x 0 необхідно забезпечити керуючий момент tx x 0 m x навколо осі x на час: . (4) mx 35 Згідно з формулою (2) поперечна кутова швидкість перерозподіляється між проекціями на осі Y і Z , при цьому перша і друга поперечні кутові швидкості змінюються в часі від 0 до r 0. Коли напрямок поперечної кутової швидкості збігається з віссю Y , тоді y r0 , z 0 , а якщо з віссю Z - y 0 , z r0 . В цей час необхідно демпфірувати повздовжню кутову 2 UA 98665 U 5 10 15 20 25 30 35 швидкість, тоді поперечна кутова швидкість не змінюється і збігається з віссю Y чи віссю Z . При цьому при демпфіруванні поперечної кутової швидкості мінімізується витрата робочого тіла через колінеарність векторів поперечної кутової швидкості і керуючого моменту. Спосіб функціонує таким чином: за допомогою датчиків 1, 2, 3 виміряють три складові кутової швидкості, що через блоки підключення 4, 5, 6 з'єднані з блоками керування 7, 8, 9. Блоки керування 7, 8, 9 виробляють керуючі сигнали на виконавчі органи 10, 11, 12. Одночасно складові поперечної кутовий швидкості з датчиків 2, 3 надходять на входи блока визначення початку гасіння кутових швидкостей 13, вихід якого підключений до другого входу блока 4. Сигнал про момент закінчення демпфірування повздовжньої кутової швидкості з другого виходу блока 7 надходить на другі входи блоків 5, 6. Для визначення відмови датчика 1 блок діагностики 14 на початку режиму демпфірування протягом тестового інтервалу часу t T через другий вхід блока 7 забезпечує включення виконавчих органів повздовжнього каналу 10, для зміни кутової швидкості на тестову величину TX m x t T . За допомогою датчика 1 вимірюються поточні значення кутової швидкості на початку і в кінці тестового інтервалу часу і визначається зміна кутової швидкості на вимірювану величину BX . По величині різниці TX BX PX фіксується відмова датчика 1, коли ця різниця більше допустимої величини, і з блока 14 сигнал про відмову датчика 1 надходить на другий вхід блока 16. При цьому блок 15 забезпечує визначення повздовжньої кутової швидкості відповідно до співвідношення (3), яка надходить на перший вхід блока 16. Блок 16 забезпечує визначення часу гасіння повздовжньої кутової швидкості згідно з співвідношенням (4) і цей час надходить до третього входу блока 7. Розглянемо процеси управління при демпфіруванні повздовжньої x і поперечних кутових швидкостей. У блоці 13 визначаються необхідні значення поперечних кутових швидкостей, при яких необхідно починати демпфірування повздовжньої кутової швидкості, щоб забезпечити після демпфірування повздовжньої кутової швидкості збіг напрямку вектора поперечної кутової швидкості з напрямком однієї з поперечних осей Z чи Y . З врахуванням цього витримують паузу без керування до моменту, поки обмірювані поперечні кутові швидкості з датчиків 2, 3 не збіжаться з необхідними, після чого блок 13 через блоки 4 і 7 включає виконавчі органи повздовжнього каналу 10, що потім виключаються блоком 7 після демпфірування повздовжньої кутової швидкості x 0 . У результаті повздовжня й одна з поперечних кутових швидкостей будуть дорівнювати нулю, а друга поперечна швидкість буде дорівнювати r0. Потім по інформації з другого виходу блока 7 через блоки 5 і 8 включаються виконавчі органи 11, якщо напрямок вектора поперечної кутової швидкості збігається з віссю Y , і через блоки 6, 9 включаються виконавчі органи 12, якщо напрямок вектора поперечної кутової швидкості збігається з віссю Z . Виконавчі органи 11 виключаються блоком 8 після демпфірування поперечної кутової швидкості y 0 , а виконавчі органи 12 виключаються 40 блоком 9 після демпфірування поперечної кутової швидкості z 0 . В результаті поперечні кутові швидкості будуть дорівнювати нулю. Таким чином, запропонований спосіб дозволяє забезпечити демпфірування початкових кутових швидкостей космічного літального апарата навколо трьох осей за допомогою реактивних виконавчих органів з високою надійністю і мінімальною витратою робочого тіла. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 55 Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості, навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування повздовжньої кутової швидкості визначають момент початку демпфірування повздовжньої кутової швидкості за умови збігу напрямку вектора поперечної кутової швидкості з напрямком однієї з поперечних осей після демпфірування повздовжньої кутової швидкості, забезпечують демпфірування повздовжньої кутової швидкості за рахунок включення керуючих двигунів у повздовжньому каналі, потім включають двигуни, що створюють керуючий момент навколо поперечної осі, напрямок якої збігається з напрямком вектора поперечної кутової швидкості, чим забезпечують демпфірування поперечних кутових швидкостей, який 3 UA 98665 U відрізняється тим, що на початку режиму демпфірування діагностують працездатність датчика повздовжньої кутової швидкості і в разі його відмови визначають повздовжню кутову швидкість в залежності від швидкості повороту вектора поперечної кутової швидкості, а також визначають час гасіння повздовжньої кутової швидкості. Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B64G 1/24
Мітки: вісесиметричного, космічного, апарата, кутових, спосіб, швидкостей, демпфірування, літального
Код посилання
<a href="https://ua.patents.su/6-98665-sposib-dempfiruvannya-kutovikh-shvidkostejj-visesimetrichnogo-kosmichnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата</a>
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 86640
Опубліковано: 10.01.2014
Автори: Бандура Іван Миколайович, Глушковський Олександр Олександровіч, Кулік Анатолій Степанович
МПК: B64G 1/24
Мітки: апарата, швидкостей, демпфірування, літального, кутових, вісесиметричного, космічного, спосіб
Формула / Реферат:
Спосіб демпфірування кутових швидкостей вісесимеричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування подовжньої кутової швидкості визначають момент початку демпфірування подовжньої кутової...
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11858
Опубліковано: 16.01.2006
Автори: Войченко Оксана Олександрівна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: демпфірування, літального, швидкостей, вісесиметричного, кутових, спосіб, космічного, апарата
Формула / Реферат:
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування подовжньої кутової швидкості визначають момент початку...
Спосіб відмовостійкого демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 36117
Опубліковано: 10.10.2008
Автори: Симонов Володимир Федорович, Бандура Іван Миколайович, Драньов Олександр Сергійович
МПК: B64G 1/24
Мітки: спосіб, демпфірування, вісесиметричного, кутових, літального, космічного, швидкостей, відмовостійкого, апарата
Формула / Реферат:
Спосіб відмовостійкого демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, забезпечують паузу без керування, забезпечують демпфірування подовжньої кутової швидкості, потім забезпечують демпфірування поперечних кутових швидкостей, який відрізняється тим, що після вимірювання початкових кутових швидкостей...
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата

Номер патенту: 98165
Опубліковано: 27.04.2015
Автори: Кулік Анатолій Степанович, Бандура Іван Миколайович, Кабаченко Роман Анатолійович
МПК: B64G 1/24
Мітки: апарата, демпфірування, космічного, кутових, літального, швидкостей, вісесиметричного, система
Формула / Реферат:
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків...
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 87087
Опубліковано: 27.01.2014
Автори: Бандура Іван Миколайович, Хірний Валентин Віталійович
МПК: B64G 1/24
Мітки: демпфірування, швидкостей, вісесиметричного, кутових, система, апарата, літального, космічного
Формула / Реферат:
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків...
Попередній патент: Система керування ракети в каналі тангажа
Наступний патент: Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Випадковий патент: Ефективна доставка ліпідів у слізну плівку людини з використанням чутливої до солі емульсійної системи