Спосіб відмовостійкого демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 36117
Опубліковано: 10.10.2008
Автори: Бандура Іван Миколайович, Симонов Володимир Федорович, Драньов Олександр Сергійович
Формула / Реферат
Спосіб відмовостійкого демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, забезпечують паузу без керування, забезпечують демпфірування подовжньої кутової швидкості, потім забезпечують демпфірування поперечних кутових швидкостей, який відрізняється тим, що після вимірювання початкових кутових швидкостей послідовно тестують перший та другий поперечний канали керування виконавчими органами, визначають необхідні поперечні осі, де в каналах керування виконавчими органами відсутні несправності типу "невключення", після забезпечення паузи без керування визначають момент початку демпфірування подовжньої кутової швидкості за умови збігу напрямку вектора поперечної швидкості з напрямком необхідної поперечної осі.
Текст
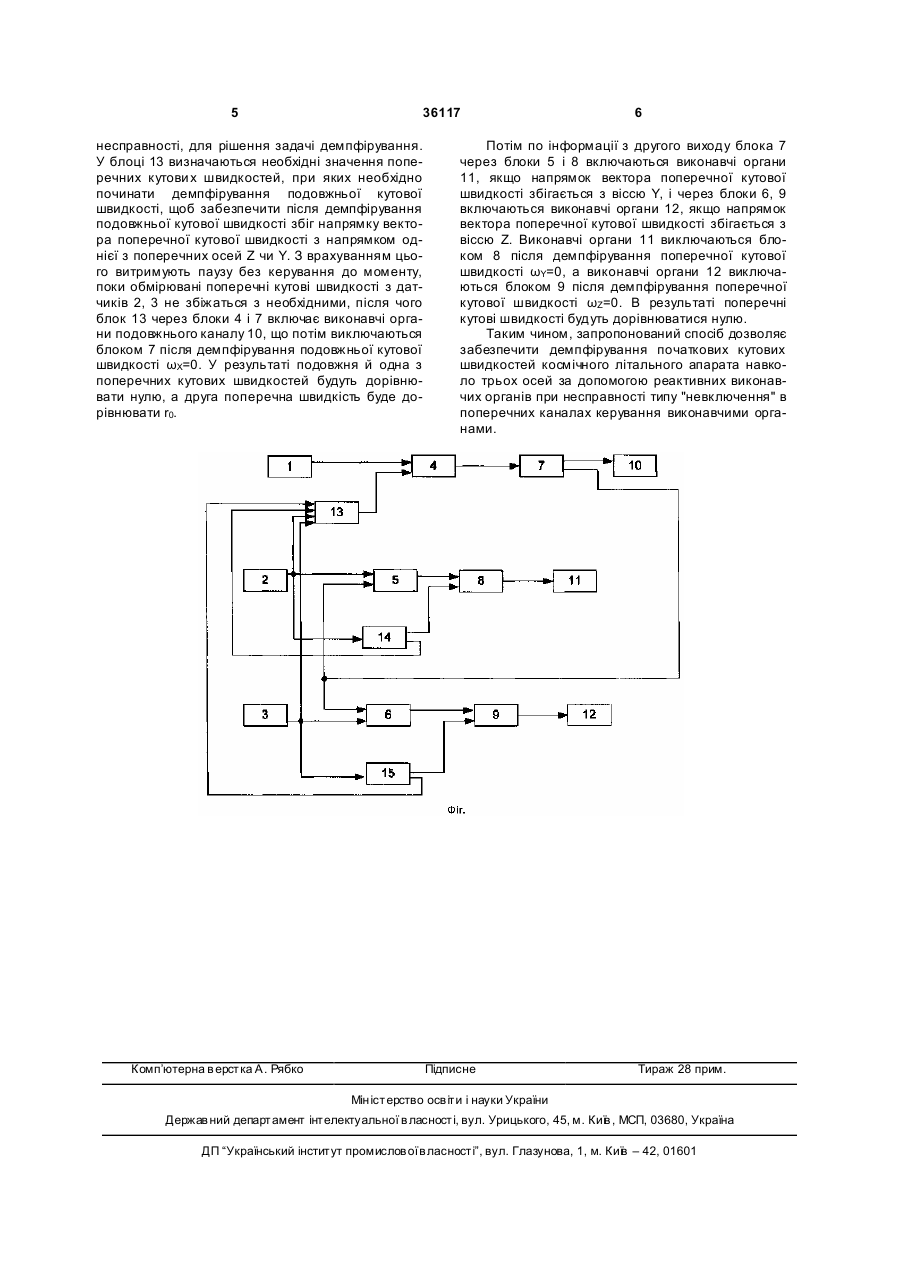
Спосіб відмовостійкого демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, забезпечують паузу 3 36117 полягає в тім, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, забезпечують паузу без керування, забезпечують демпфірування подовжньої кутової швидкості, потім забезпечують демпфірування поперечних кутови х швидкостей, відповідно до корисної моделі, після вимірювання початкових кутови х швидкостей послідовно тестують перший та другий поперечний канали керування виконавчими органами, визначають необхідні поперечні осі, де в каналах керування виконавчими органами відсутні несправності типу "невключення", після забезпечення паузи без керування визначають момент початку демпфірування подовжньої кутової швидкості за умови збігу напрямку вектора поперечної швидкості з напрямком необхідної поперечної осі. Сутність корисної моделі пояснюється кресленням, де на Фіг. представлена структурна схема системи демпфірування кутових швидкостей космічного літального апарата з реактивними виконавчими органами. Система містить датчик подовжньої кутової швидкості 1, датчик першої поперечної кутової швидкості 2, датчик другої поперечної кутової швидкості 3, блок 4 підключення датчика 1, блок 5 підключення датчика 2, блок 6 підключення датчика 3, блок 7 керування виконавчими органами подовжньою каналу, блок 8 керування виконавчими органами першого поперечного каналу, блок 9 керування виконавчими органами другого поперечного каналу, виконавчі органи подовжнього каналу 10, виконавчі органи першого поперечного каналу 11, виконавчі органи другого поперечного каналу 12, блок 13 визначення початку демпфірування подовжньої швидкості, блок 14 тестування першого поперечного каналу керування виконавчими органами, блок 15 тестування другого поперечного каналу керування виконавчими органами. Після відділення космічного апарата від носія, або неорієнтованого польоту КЛА виникають кутові швидкості, які необхідно демпфірувати. Запропонований спосіб дозволяє вирішити цю задачу, забезпечуючи мінімізацію витрат робочого тіла і демпфірування кутови х швидкостей при несправності типу "невключення" в поперечних каналах керування виконавчими органами. Рівняння руху для вісесиметричного космічного апарата в зв'язаній системі координат OXYZ (приймемо, що віссю симетрії є вісь X) записуються в наступному вигляді (збурюючі моменти передбачаються малими і не враховуються) [див. Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами. М., "Машиностроение", 1974. 340с.] & wX = m X ; & w Y - a × w Z × wZ = mY ; (1) & w Z + a × wY × wZ = mZ ; де ωX, ωY, ωZ - проекції кутової швидкості космічного апарата на осі зв'язаної системи координат: ωX - подовжня кутова швидкість; ωY - перша поперечна кутова швидкість; ωZ - др уга поперечна кутова швидкість; 4 m X, m Y, m Z - проекції приведеного керуючого моменту; а - константа. Вважаємо, що в початковий момент часу складові кутової швидкості задовольняють співвідношенню ωі= ωі0, і=X,Y,Z. Знайдемо вільний рух апарата шляхом інтегрування системи (1) при m і=0: ωX= ωX0; ωY=r0 ·sina; (2) ωX=r0 ·cosa; де r0 = w2 0 + w2 0 - модуль поперечної кутоY Z вої швидкості; w a = a × w X0 × t + arctg Y 0 = a 0 × t + a 0 w Z0 де a кут між напрямком поперечної кутової швидкості і віссю Z. Згідно з (формулою (2) поперечна кутова швидкість перерозподіляється між проекціями на осі Y і Z, при цьому перша і друга поперечні кутові швидкості і змінюються в часі від 0 до r0. Коли напрямок поперечної кутової швидкості збігається з віссю У, тоді ωY=r0 , ωZ=0, а якщо з віссю Z-ωY=0, ωZ=r0. В цей час необхідно демпфірувати подовжню кутову швидкість, тоді поперечна кутова швидкість не змінюється і збігається з віссю Y чи віссю Z. При цьому вибирається та вісь, де в каналі керування виконавчими органами відсутня несправність. Приклад функціювання способу: за допомогою датчиків 1, 2, 3 виміряють три складові кутової швидкості, що через блоки підключення 4, 5, 6 з'єднані з блоками керування 7, 8, 9. Блоки керування 7, 8, 9 виробляють керуючі сигнали на виконавчі органи 10, 11, 12. Одночасно складові поперечної кутовий швидкості з датчиків 2, 3 надходять на входи блока визначення початку гасіння кутових швидкостей 13, вихід якого підключений до другого входу блока 4. Сигнал про момент закінчення демпфірування подовжньої кутової швидкості з другого ви ходу блока 7 надходять на другі входи блоків 5, 6. Розглянемо процеси управління при демпфіруванні подовжньої ωХ і поперечних кутових швидкостей. Після вимірювання кутови х швидкостей, проводять тестування першого поперечного каналу керування виконавчими органами за допомогою блоку тестування 14, який послідовно формує керуючі сигнали мінімальної тривалості позитивної та негативної полярності і а аналізує відповідність зміни першої кутової швидкості цим сигналам. Якщо при подачі керуючого сигнала кутова швидкість не змінюється, то це свідчить про наявність несправності каналу типа "невключення". При цьому блок 14 видає на третій вхід блоку 13 відповідний сигнал. Потім аналогічно проводять тестування другого поперечного каналу за допомогою блоку тестування і 5, який при наявності несправності видає відповідний сигнал на четвертий вхід блоку 13. на основі цієї інформації з блоків 14 та 15 блок 13 фіксує необхідну поперечну вісь, де немає несправності. При цьому із чотирьох напрямків осей Y, +Y, -Z і +Z, достатньо навіть одної осі, де немає 5 36117 несправності, для рішення задачі демпфірування. У блоці 13 визначаються необхідні значення поперечних кутови х швидкостей, при яких необхідно починати демпфірування подовжньої кутової швидкості, щоб забезпечити після демпфірування подовжньої кутової швидкості збіг напрямку вектора поперечної кутової швидкості з напрямком однієї з поперечних осей Z чи Y. З врахуванням цього витримують паузу без керування до моменту, поки обмірювані поперечні кутові швидкості з датчиків 2, 3 не збіжаться з необхідними, після чого блок 13 через блоки 4 і 7 включає виконавчі органи подовжнього каналу 10, що потім виключаються блоком 7 після демпфірування подовжньої кутової швидкості ωХ=0. У результаті подовжня й одна з поперечних кутових швидкостей будуть дорівнювати нулю, а друга поперечна швидкість буде дорівнювати r0. Комп’ютерна в ерстка А. Рябко 6 Потім по інформації з другого виходу блока 7 через блоки 5 і 8 включаються виконавчі органи 11, якщо напрямок вектора поперечної кутової швидкості збігається з віссю Y, і через блоки 6, 9 включаються виконавчі органи 12, якщо напрямок вектора поперечної кутової швидкості збігається з віссю Z. Виконавчі органи 11 виключаються блоком 8 після демпфірування поперечної кутової швидкості ωY=0, а виконавчі органи 12 виключаються блоком 9 після демпфірування поперечної кутової швидкості ωZ=0. В результаті поперечні кутові швидкості будуть дорівнюватися нулю. Таким чином, запропонований спосіб дозволяє забезпечити демпфірування початкових кутових швидкостей космічного літального апарата навколо трьох осей за допомогою реактивних виконавчих органів при несправності типу "невключення" в поперечних каналах керування виконавчими органами. Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of fault-tolerant damping of angular velocities of axisymmetric spaceship
Автори англійськоюBandura Ivan Mykolaiovych, Symonov Volodymyr Fedorovych, Draniov Oleksandr Serhiiovych
Назва патенту російськоюСпособ отказоустойчивого демпфирования угловых скоростей осесимметричного космического летательного аппарата
Автори російськоюБандура Иван Николаевич, Симонов Владимир Федорович, Дранев Александр Сергеевич
МПК / Мітки
МПК: B64G 1/24
Мітки: вісесиметричного, спосіб, швидкостей, апарата, літального, кутових, демпфірування, відмовостійкого, космічного
Код посилання
<a href="https://ua.patents.su/3-36117-sposib-vidmovostijjkogo-dempfiruvannya-kutovikh-shvidkostejj-visesimetrichnogo-kosmichnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб відмовостійкого демпфірування кутових швидкостей вісесиметричного космічного літального апарата</a>
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11855
Опубліковано: 16.01.2006
Автори: Снагіцький Сергій Володимирович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: літального, система, вісесиметричного, демпфірування, швидкостей, апарата, кутових, космічного
Формула / Реферат:
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків...
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 11858
Опубліковано: 16.01.2006
Автори: Войченко Оксана Олександрівна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: кутових, літального, космічного, вісесиметричного, швидкостей, спосіб, апарата, демпфірування
Формула / Реферат:
Спосіб демпфірування кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для демпфірування складових кутової швидкості обертання навколо трьох осей забезпечують паузу без керування, для демпфірування подовжньої кутової швидкості визначають момент початку...
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 35086
Опубліковано: 26.08.2008
Автори: Бандура Іван Миколайович, Юрковець Ігор Валентинович, Субота Анатолій Максимович
МПК: B64G 1/24
Мітки: швидкостей, кутових, літального, космічного, демпфірування, апарата, вісесиметричного, система
Формула / Реферат:
Система демпфірування кутових швидкостей вісесиметричного космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, між кожним датчиком і блоком керування органами...
Система демпфірування кутових швидкостей космічного літального апарата

Номер патенту: 26160
Опубліковано: 10.09.2007
Автори: Бандура Іван Миколайович, Колесников Геннадій Викторович
МПК: B64G 1/24
Мітки: система, демпфірування, апарата, космічного, швидкостей, кутових, літального
Формула / Реферат:
Система демпфірування кутових швидкостей космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків керування, між...
Спосіб гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата
Номер патенту: 80583
Опубліковано: 10.10.2007
Автори: Чебераха Ольга Анатоліївна, Бандура Іван Миколайович, Кулік Анатолій Степанович
МПК: B64G 1/24
Мітки: початкових, літального, вісесиметричного, гасіння, апарата, спосіб, космічного, швидкостей, кутових
Формула / Реферат:
Спосіб гасіння початкових кутових швидкостей вісесиметричного космічного літального апарата, який полягає в тому, що вимірюють кутові швидкості навколо трьох осей зв'язаної системи координат апарата, включають керуючі реактивні двигуни, який відрізняється тим, що для гасіння складових кутової швидкості обертання навколо двох осей забезпечують паузу без керування, для гасіння подовжньої кутової швидкості й однієї з поперечних кутових...
Попередній патент: Холодильник
Наступний патент: Різальна коронка виконавчого органу гірничого комбайна
Випадковий патент: Робоче обладнання одноківшевого гідравлічного екскаватора