Спосіб та пристрій позиціонування блоків обслуговування вуглезавантажувальної вагонетки на завантажувальних отворах коксової печі
Формула / Реферат
1. Спосіб позиціонування блоків обслуговування вуглезавантажувальної вагонетки на завантажувальних отворах коксової печі, при якому рухому по рейках вуглезавантажувальну вагонетку переміщають по склепінню коксової печі і для завантаження пічних камер позиціонують в тих місцях, які задають за допомогою системи керування і які відповідають завантажувальним отворам в склепінні печі, а потім принаймні один блок обслуговування вуглезавантажувальної вагонетки за рахунок горизонтальних установчих рухів по двох осях підводять до завантажувальних отворів, який відрізняється тим, що після кожного позиціонування вуглезавантажувальної вагонетки за допомогою оптичного способу вимірювання в заданому способом вимірювання вимірювальному полі реєструють координати принаймні одного нанесеного на склепінні печі маркування, яке точно відповідає середній осі завантажувального отвору, і порівнюють з еталонними значеннями, що зберігаються для цього маркування в системі керування, при цьому відхилення між виміряними координатами і координатами, що зберігаються в системі керування, визначають для обох осьових напрямів (X, Y) і враховують при установчому русі блока обслуговування.
2. Спосіб за п. 1, який відрізняється тим, що блок обслуговування оснащують ходовим механізмом, що забезпечує горизонтальні установчі рухи по двох осях, при цьому з еталонними значеннями маркування, що зберігаються, співвідносять значення установчого ходу блока обслуговування по обох осях і записують в пам'ять системи керування для позиціонування блока обслуговування на завантажувальних отворах з еталонного положення, при цьому блок обслуговування переміщають і позиціонують на завантажувальних отворах відповідно до коректованих значень, які виникають із записаних в пам'ять значень установчого ходу і реєстрації маркування.
3. Спосіб за п. 1 або 2, який відрізняється тим, що блок обслуговування виконаний з можливістю переміщення по двох перпендикулярних одна одній осях, при цьому для горизонтального переміщення блока обслуговування використовують гідравлічні приводи, обладнані системою вимірювання переміщень.
4. Спосіб за будь-яким з пп. 1-3, який відрізняється тим, що реєстрацію маркування виконують для точного позиціонування на завантажувальних отворах коксової печі завантажувальних телескопів, кришкопідіймачів і очищувачів арматури.
5. Спосіб за будь-яким з пп. 1-4, який відрізняється тим, що для оптичного способу вимірювання використовують прилад цифрової реєстрації зображень або сканер.
6. Спосіб за будь-яким з пп. 1-5, який відрізняється тим, що маркування наносять на арматурі завантажувальних отворів.
7. Спосіб за будь-яким з пп. 1-6, який відрізняється тим, що записаний оптичним способом вимірювання вимірювальний сигнал порівнюють з сигналом, що зберігається як еталон, при цьому вимірювальні сигнали, що характерно відрізняються від сигналу, що зберігається як еталон, як помилкові сигнали не враховують.
8. Спосіб за будь-яким з пп. 1-7, який відрізняється тим, що маркування очищають стиснутим повітрям або щітками, перш ніж буде здійснений оптичний спосіб вимірювання.
9. Пристрій для здійснення способу за будь-яким з пп. 1-8, що включає переміщувану по рейках на склепінні коксової печі вуглезавантажувальну вагонетку, яка містить як блоки обслуговування транспортер на нижній стороні із завантажувальним телескопом, кришкопідіймач та пристрій для очищення арматур завантажувальних отворів, причому принаймні один блок обслуговування (1) містить ходовий механізм (7), який забезпечує його керовані системою керування (2) установчі рухи по двох осях, який відрізняється тим, що вуглезавантажувальна вагонетка містить оптичну вимірювальну систему (12) для реєстрації маркування (13), причому маркування (13) нанесені на склепінні печі і відповідають завантажувальним отворам (3), а оптична вимірювальна система (12) формує вимірювальне поле (15) і містить сполучений з системою керування (2) блок обробки, який за виміряними значеннями (Х1, Y1) положення маркування (13) по відношенню до вимірювального поля (15) визначає значення установчих рухів блока обслуговування (1) і передає ці значення на систему керування (2).
10. Пристрій за п. 9, який відрізняється тим, що оптична вимірювальна система (12) містить сканер або прилад цифрової реєстрації зображень.
11. Пристрій за п. 9 або 10, який відрізняється тим, що маркування (13) розташовані на арматурі (14) завантажувальних отворів.
12. Пристрій за будь-яким з пп. 9-11, який відрізняється тим, що з оптичною вимірювальною системою (12) взаємодіє очищаючий пристрій (16) для очищення реєстрованого маркування (13) та поля, що оточує його.
13. Пристрій за п. 12, який відрізняється тим, що очищаючий пристрій (16) містить сопловий пристрій (17) для обдування стиснутим повітрям маркування (13) і поля, що оточує його.
Текст
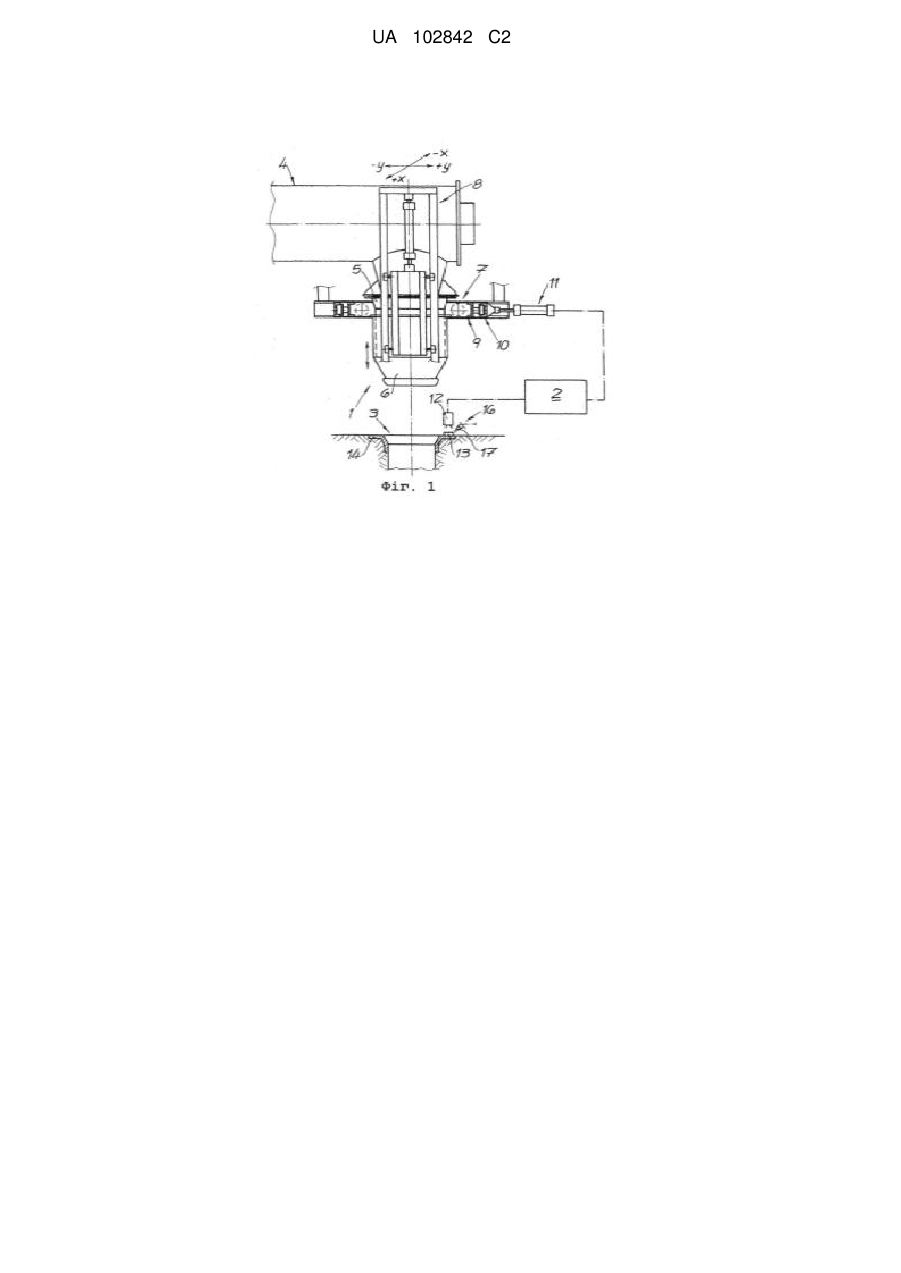
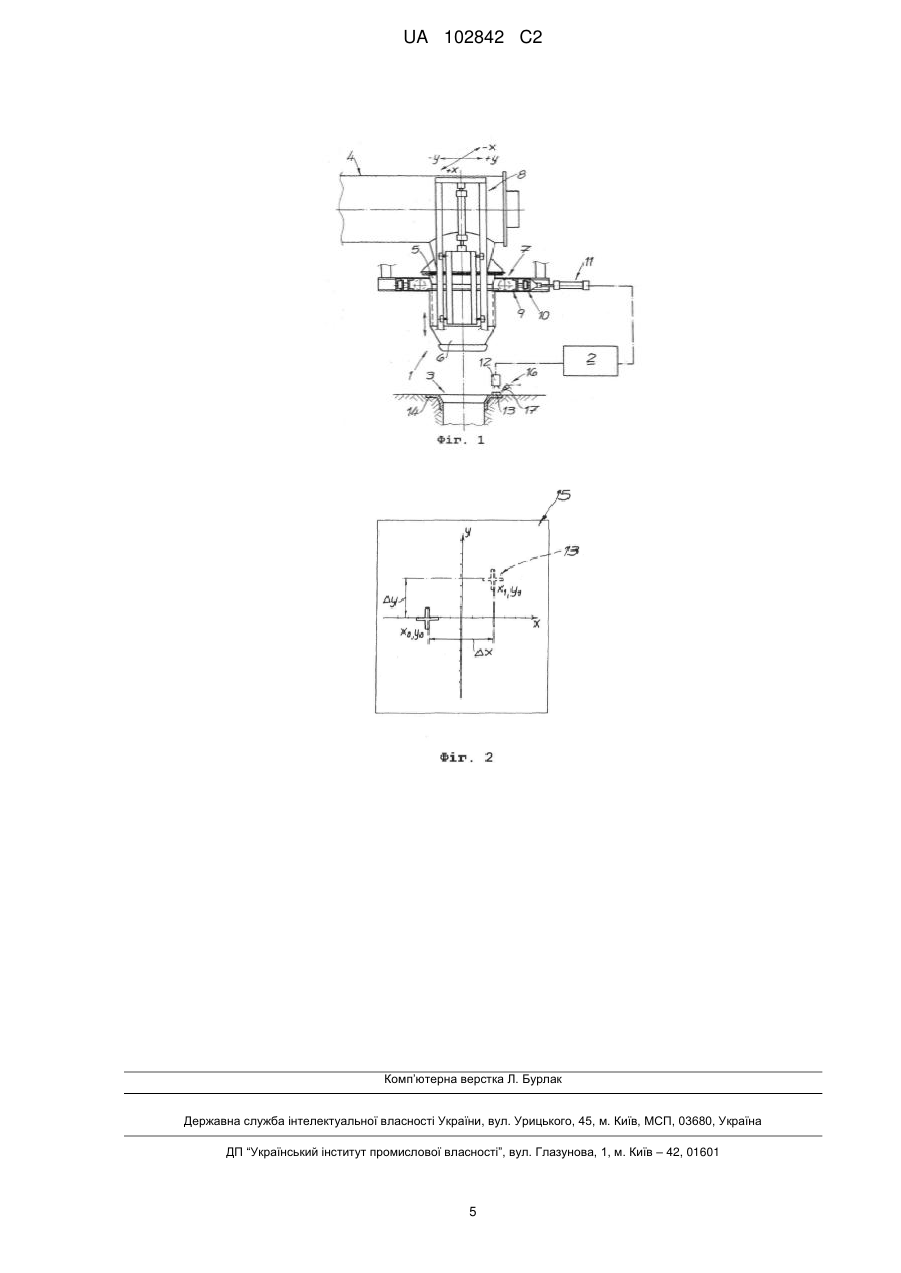
Реферат: Винахід належить до способу позиціонування блоків обслуговування вуглезавантажувальної вагонетки на завантажувальних отворах коксової печі, при якому рухому по рейках вуглезавантажувальну вагонетку переміщають по склепінню коксової печі і для завантаження пічних камер позиціонують в тих місцях, які задаються за допомогою системи керування і які відповідають завантажувальним отворам в склепінні печі, а потім принаймні один блок обслуговування вуглезавантажувальної вагонетки за рахунок горизонтальних установчих рухів по двох осях підводять до завантажувальних отворів. Згідно з винаходом, після кожного позиціонування вуглезавантажувальної вагонетки за допомогою оптичного способу вимірювання в заданому способом вимірювання вимірювальному полі реєструють координати принаймні одного нанесеного на склепінні печі маркування, яке точно відповідає середній осі завантажувального отвору, і порівнюють з еталонними значеннями, що зберігаються для цього маркування в системі керування. Відхилення між виміряними координатами і координатами, що зберігаються в системі керування, визначаються для обох осьових напрямів. При установчому русі блока обслуговування враховуються диференціальні значення як значення коректувань. Крім того, винахід стосується пристрою для здійснення способу. UA 102842 C2 (12) UA 102842 C2 UA 102842 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід відноситься до способу і пристрою для позиціонування блоків обслуговування вуглезавантажувальної вагонетки на завантажувальних отворах коксової печі. У запропонованому способі рухома по рейках вуглезавантажувальна вагонетка переміщається по склепінню коксової печі і для завантаження пічних камер позиціонується в тих місцях, які задаються за допомогою системи керування і які відповідають завантажувальним отворам в склепінні печі, а потім, принаймні, один блок обслуговування вуглезавантажувальної вагонетки за рахунок горизонтальних установних рухів по двох осях підводиться до завантажувальних отворів. Блок обслуговування може бути, зокрема, завантажувальний телескоп на нижній стороні транспортера, кришкопідіймач та/або очищувач арматури, що оточує завантажувальні отвори рам. Вуглезавантажувальна вагонетка з горизонтально переміщуваним по двох осях блоком обслуговування, що включає в комбінації завантажувальний телескоп, кришкопідіймач і/або очищувач арматури, відомий з ЕР 1293552 В1. За рахунок горизонтальних установних рухів блок обслуговування можна погоджувати з фактичним положенням завантажувальних отворів. Позиційні дані всіх арматур зберігаються в системі керування. Для завантаження пічних камер коксової печі вуглезавантажувальна вагонетка переміщається в задані положення, відповідні завантажувальним отворам в склепінні печі. Після позиціонування вуглезавантажувальної вагонетки блок обслуговування переміщається відповідно до координат, що зберігаються в системі керування, і позиціонується на завантажувальному отворі. Вуглезавантажувальна вагонетка рухається по рейках, укладених на склепінні коксової печі. Колеса вуглезавантажувальної вагонетки мають реборди, що перешкоджають сходу коліс з рейок. Необхідний зазор між ребордами і рейками, а також неминучий знос реборд і рейок негативно позначаються на точності позиціонування вуглезавантажувальної вагонетки. Зазор між ребордами і рейками, а також інші, системно-обумовлені неточності положення при позиціонуванні вуглезавантажувальної вагонетки можуть підсумовуватися так, що між блоком обслуговування, наприклад, завантажувальним телескопом, і арматурою завантажувального отвору може виникнути бічний зсув в декілька сантиметрів. Відхилення визначаються рухом вуглезавантажувальної вагонетки і, будучи системно-обумовленими, змінюються при кожному новому переміщенні. Їх не можна усунути за рахунок зберігання значень коректувань в системі керування. У основі винаходу лежить завдання усунення вказаних недоліків. Повинні бути створені спосіб і пристрій, які дозволили б надійно виявляти і коректувати описані відхилення положення блоку обслуговування на арматурах. Це завдання вирішується за допомогою способу за п. 1 формули. Згідно винаходу, після кожного позиціонування вуглезавантажувальної вагонетки за допомогою оптичного способу вимірювання в заданому способом вимірювання вимірювальному полі реєструються координати, принаймні, одного нанесеного на склепінні печі маркування, яке твердо відповідає середній осі завантажувального отвору, і порівнюються з еталонними значеннями, що зберігаються для цього маркування в системі керування. Відхилення між виміряними координатами, що зберігаються в системі керування, визначаються для обох осьових напрямів Х, Y, які враховуються при установному русі блоку обслуговування. За допомогою запропонованого способу за рахунок описаної реєстрації маркування на кожному завантажувальному отворі визначається відстань між розташованим на вуглезавантажувальній вагонетці блоком обслуговування і середньою віссю і завантажувальним отвором і відповідно узгоджується установний хід блоку обслуговування. Це гарантує, що при кожному процесі завантаження блоки обслуговування вуглезавантажувальної вагонетки будуть оптимально орієнтовані на кожному завантажувальному отворі. Переміщуваний запропонованим способом блок обслуговування доцільно обладнаний ходовим механізмом, який забезпечує горизонтальні установні рухи по двох осях. За допомогою тих, що зберігаються в системі керування еталонних значень маркування значення установного ходу блоку обслуговування співвідносяться з обома осями і записуються в пам'ять системи керування для позиціонування блоку обслуговування на завантажувальних отворах з еталонного положення. По записаних в пам'ять значеннях установного ходу і значеннях коректувань, що виникають в результаті реєстрації, встановлюється фактичний установний хід відносно його орієнтації і довжини, і блок обслуговування відповідно переміщається. Переважно для горизонтального переміщення блоку обслуговування, виконаного з можливістю переміщення по двох перпендикулярним один одному осям, використовуються гідравлічні приводи, обладнані системою вимірювання переміщень. Для оптичної вимірювальної системи використовується переважно прилад цифрової реєстрації зображень або сканер. Щоб уникнути того, щоб предмети, що випадково знаходяться 1 UA 102842 C2 5 10 15 20 25 30 35 40 45 50 55 60 у вимірювальному полі, провокували помилкові вимірювання, записаний оптичним способом вимірювання вимірювальний сигнал доцільно порівнюється з сигналом, що зберігається як еталон. Вимірювальні сигнали, які характерно відрізняються від сигналу, що зберігається як еталон, як помилкові сигнали не враховуються. Щоб підвищити експлуатаційну надійність, може бути доцільним очищати маркування стиснутим повітрям або щіткою, перш ніж здійснюватиметься оптичний спосіб вимірювання. Маркування можуть наноситися на рами завантажувальних отворів. Маркування можуть виконуватися двомірними і складатися, наприклад, з кольорових маркувань або табличок, що міцно сполучаються з рамою. Крім того, маркування керування можуть виконуватися тривимірними, наприклад у вигляді ребра, яке помітно виділяється на навколишньому фоні. Запропонований спосіб застосовується, зокрема, для точного позиціонування завантажувальних телескопів, кришкопідіймачів і/або очищувачів арматури на завантажувальних отворах коксової печі. Об'єктом винаходу є також пристрій для здійснення описаного способу, охарактеризований ознаками за п. 9 формули. Він містить переміщувану по рейках на склепінні коксової печі вуглезавантажувальну вагонетку, яка містить як блоки обслуговування транспортер на нижній стороні із завантажувальним телескопом, що опускається, кришкопідіймач і пристрій для очищення арматури завантажувальних отворів. Принаймні, один блок обслуговування містить ходовий механізм, який забезпечує його керовані системою керування установні рухи по двох осях. Вуглезаватажувальна вагонетка обладнана, згідно винаходу, оптичною вимірювальною системою для реєстрації маркувань, причому маркування нанесені на склепінні печі і відповідають завантажувальним отворам. Оптична вимірювальна система містить сканер або прилад цифрової реєстрації зображень і сполучений з системою керування блок обробки, який по виміряних значеннях положення маркування по відношенню до заданого оптичною вимірювальною системою вимірювального поля визначає значення коректувань для установних рухів блоку обслуговування і передає значення коректувань на систему керування. Остання керує горизонтальними установними рухами блоку обслуговування з урахуванням значень коректувань. З оптичною вимірювальною системою може взаємодіяти очищаючий пристрій для очищення реєстрованого маркування і поля, що оточує його, яке містить сопловий пристрій для обдування переважно стиснутим повітрям маркувань і поля, що оточує його. Нижче винахід пояснюється на прикладі його здійснення з посиланням на креслення, на яких схемний представлене наступне: - Фіг. 1: пристрій для завантаження камер коксової печі; - Фіг. 2: вимірювальне поле оптичної вимірювальної системи, використовуваної для керування пристроєм по Фіг. 1. На Фіг. 1 зображений блок обслуговування 1 на нижній стороні вуглезавантажувальної вагонетки (не показаний), який переміщається по рейках на склепінні коксової печі і для завантаження пічних камер позиціонується в тих місцях, які задаються системою керування 2 і відповідають завантажувальним отворам 3 в склепінні печі. Блок обслуговування 1 є в даному прикладі завантажувальним телескопом, який розташований під випускним отвором горизонтального транспортного шнека 4 і містить вхідну воронку 5, а також нижню частину 6, що опускається в завантажувальні отвори в склепінні коксової печі. Для підгонки до даного положення завантажувальних отворів відносно вуглезавантажувальної вагонетки завантажувальний телескоп переміщається по двох перпендикулярних одна одній осях Х, Y і містить для цієї мети ходовий механізм 7, що забезпечує горизонтальні установні рухи по двох осях. Вхідна воронка 5 завантажувального телескопа і сполучений з його нижньою частиною 6 підйомний пристрій 8 закріплені на несучій рамі 9, розташованій усередині ходової рами 10 з можливістю лінійного переміщення по першій осі Х. Ходова рама 10 розташована з можливістю горизонтального переміщення по другій осі Y по рейках, закріплених на нижній стороні вуглезавантажувальної вагонетки. До несучої 9 і ходової 10 рам приєднані гідравлічні приводи 11, які обладнані пристроями для вимірювання переміщень і установними ходами яких управляє система керування 2. У ідеальному випадку завантажувальні отвори 3 в склепінні коксової печі розташовані з рівними проміжками та із збігом у напрямку переміщення вуглезавантажувальної вагонетки. Як правило, реальні умови в коксовій печі відрізняються від цього ідеального випадку. Зокрема, в коксових печах старої конструкції відхилення положення завантажувальних отворів 3 в обох напрямах Х, Y нерідко складають більш ± 50 мм. Відхилення положення можуть бути компенсовані за допомогою ходового механізму 7, так що завантажувальний телескоп може бути опущений на завантажувальні отвори 3 завжди вертикально і без перекосу його нижньої 2 UA 102842 C2 5 10 15 20 25 30 35 40 45 частини 6. Це забезпечує безпиловий і безперебійний процес завантаження. Необхідні горизонтальні установні ходи зберігаються для кожного завантажувального отвору 3 в пам'яті системи керування. Описана, позбавлена зсувів робота завантажувального телескопа або розташованого на вуглезавантажувальній вагонетці блоку обслуговування 1 припускає, проте, щоб вуглезавантажувальна вагонетка після кожного переміщення точно займала задане положення, відповідне завантажувальному отвору 3. На практиці це неможливо. Так, точність позиціонування вуглезавантажувальної вагонетки складає на практиці, як правило ± 5 мм. Далі слід враховувати зазор між ребордами його коліс і рейками, який, будучи обумовлений зносом, з часом змінюється. На практиці зазор складає між 2 10 мм іта 2 25 мм. В сумі відхилення переміщення вуглезавантажувальної вагонетки, що виникають в результаті, складають декілька сантиметрів, які безпосередньо позначаються на точності позиціонування блоку обслуговування 1. Відхилення визначаються переміщенням вуглезавантажувальної вагонетки і змінюються при кожному позиціонуванні. Вони не можуть бути враховані в значеннях установного руху блоку обслуговування, що зберігаються в системі керування, 1. Для підвищення точності позиціонування вуглезавантажувальна вагонетка оснащена оптичною вимірювальною системою 12, що містить сканер або прилад цифрової реєстрації зображень. За допомогою оптичної вимірювальної системи 12 реєструються нанесені на склепінні печі, наприклад на арматурах 14, маркування 13, відповідні завантажувальним отворам 3. Оптична вимірювальна система 12 задає вимірювальне поле 15 і містить блок обробки, який сполучений з системою керування 2, по виміряних значеннях положення маркування 13, що коливаються, по відношенню до вимірювального поля 15 визначає значення коректувань установного руху блоку обслуговування 1 і передає їх на систему керування 2. Остання управляє горизонтальними рухами блоку обслуговування 1 з урахуванням цих значень коректувань. На Фіг. 2 показаний спосіб обробки. Після кожного позиціонування вуглезавантажувальної вагонетки за допомогою оптичного способу вимірювання в заданому способом вимірювання вимірювальному полі 15 реєструються координати Х 1, Y1 маркування 13 нанесеного на склепінні печі, наприклад на арматурі 14, і порівнюються з еталонними значеннями Х 0, Y0, що зберігаються для цього маркування 13 в системі керування 2. Значення установних рухів, що також зберігаються в системі керування 2 блоку обслуговування 1 відносяться до випадку, коли виміряні значення координат Х1, Y1 відповідають таким, що зберігається в системі керування 2 еталонним значенням Х0, Y0. Якщо положення Х1, Y1 виміряного маркування управління 13 у вимірювальному полі 15 відрізняється від еталонних значень Х 0, Y0, що зберігається в системі керування 2, то визначаються відхилення Δх, Δу між виміряними координатами Х1, Y1 і координатами Х0, Y0 обох осьових напрямів Х, Y, що зберігаються в системі керування 2, і при установному русі блоку обслуговування 1 враховуються диференціальні значення Δх, Δу як значення коректувань. Щоб уникнути того, щоб зареєстровані вимірювальним полем 15 предмети приводили до помилкових вимірювань, записаний оптичним способом вимірювання вимірювальний сигнал порівнюється з сигналом, що зберігається як еталонне значення. Сигнали, що характерно відрізняються від сигналу, що зберігається як еталон, як помилкові сигнали не враховуються за рахунок фільтруючої схеми. У даному прикладі і відповідно до переважного варіанту виконання винаходу з оптичною вимірювальною системою 12 взаємодіє очищаючий пристрій 16 для очищення реєстрованого маркування 13 і поля, що оточує його. Він містить, наприклад, сопловий пристрій 17 для обдування стиснутим повітрям маркування і поля, що оточує його. Можливе також використання щіток. ФОРМУЛА ВИНАХОДУ 50 55 60 1. Спосіб позиціонування блоків обслуговування вуглезавантажувальної вагонетки на завантажувальних отворах коксової печі, при якому рухому по рейках вуглезавантажувальну вагонетку переміщають по склепінню коксової печі і для завантаження пічних камер позиціонують в тих місцях, які задають за допомогою системи керування і які відповідають завантажувальним отворам в склепінні печі, а потім принаймні один блок обслуговування вуглезавантажувальної вагонетки за рахунок горизонтальних установчих рухів по двох осях підводять до завантажувальних отворів, який відрізняється тим, що після кожного позиціонування вуглезавантажувальної вагонетки за допомогою оптичного способу вимірювання в заданому способом вимірювання вимірювальному полі реєструють координати принаймні одного нанесеного на склепінні печі маркування, яке точно відповідає середній осі 3 UA 102842 C2 5 10 15 20 25 30 35 40 45 50 завантажувального отвору, і порівнюють з еталонними значеннями, що зберігаються для цього маркування в системі керування, при цьому відхилення між виміряними координатами і координатами, що зберігаються в системі керування, визначають для обох осьових напрямів (X, Y) і враховують при установчому русі блока обслуговування. 2. Спосіб за п. 1, який відрізняється тим, що блок обслуговування оснащують ходовим механізмом, що забезпечує горизонтальні установчі рухи по двох осях, при цьому з еталонними значеннями маркування, що зберігаються, співвідносять значення установчого ходу блока обслуговування по обох осях і записують в пам'ять системи керування для позиціонування блока обслуговування на завантажувальних отворах з еталонного положення, при цьому блок обслуговування переміщають і позиціонують на завантажувальних отворах відповідно до коректованих значень, які виникають із записаних в пам'ять значень установчого ходу і реєстрації маркування. 3. Спосіб за п. 1 або 2, який відрізняється тим, що блок обслуговування виконаний з можливістю переміщення по двох перпендикулярних одна одній осях, при цьому для горизонтального переміщення блока обслуговування використовують гідравлічні приводи, обладнані системою вимірювання переміщень. 4. Спосіб за будь-яким з пп. 1-3, який відрізняється тим, що реєстрацію маркування виконують для точного позиціонування на завантажувальних отворах коксової печі завантажувальних телескопів, кришкопідіймачів і очищувачів арматури. 5. Спосіб за будь-яким з пп. 1-4, який відрізняється тим, що для оптичного способу вимірювання використовують прилад цифрової реєстрації зображень або сканер. 6. Спосіб за будь-яким з пп. 1-5, який відрізняється тим, що маркування наносять на арматурі завантажувальних отворів. 7. Спосіб за будь-яким з пп. 1-6, який відрізняється тим, що записаний оптичним способом вимірювання вимірювальний сигнал порівнюють з сигналом, що зберігається як еталон, при цьому вимірювальні сигнали, що характерно відрізняються від сигналу, що зберігається як еталон, як помилкові сигнали не враховують. 8. Спосіб за будь-яким з пп. 1-7, який відрізняється тим, що маркування очищають стиснутим повітрям або щітками, перш ніж буде здійснений оптичний спосіб вимірювання. 9. Пристрій для здійснення способу за будь-яким з пп. 1-8, що включає переміщувану по рейках на склепінні коксової печі вуглезавантажувальну вагонетку, яка містить як блоки обслуговування транспортер на нижній стороні із завантажувальним телескопом, кришкопідіймач та пристрій для очищення арматур завантажувальних отворів, причому принаймні один блок обслуговування (1) містить ходовий механізм (7), який забезпечує його керовані системою керування (2) установчі рухи по двох осях, який відрізняється тим, що вуглезавантажувальна вагонетка містить оптичну вимірювальну систему (12) для реєстрації маркування (13), причому маркування (13) нанесені на склепінні печі і відповідають завантажувальним отворам (3), а оптична вимірювальна система (12) формує вимірювальне поле (15) і містить сполучений з системою керування (2) блок обробки, який за виміряними значеннями (Х 1, Y1) положення маркування (13) по відношенню до вимірювального поля (15) визначає значення установчих рухів блока обслуговування (1) і передає ці значення на систему керування (2). 10. Пристрій за п. 9, який відрізняється тим, що оптична вимірювальна система (12) містить сканер або прилад цифрової реєстрації зображень. 11. Пристрій за п. 9 або 10, який відрізняється тим, що маркування (13) розташовані на арматурі (14) завантажувальних отворів. 12. Пристрій за будь-яким з пп. 9-11, який відрізняється тим, що з оптичною вимірювальною системою (12) взаємодіє очищаючий пристрій (16) для очищення реєстрованого маркування (13) та поля, що оточує його. 13. Пристрій за п. 12, який відрізняється тим, що очищаючий пристрій (16) містить сопловий пристрій (17) для обдування стиснутим повітрям маркування (13) і поля, що оточує його. 4 UA 102842 C2 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for the positioning of operating units of a coal filling cart at the filling openings of a coke oven
Автори англійськоюKnoch, Ralf, Schucker, Franz-Josef
Назва патенту російськоюСпособ и устройство позиционирования блоков обслуживания углезагрузочной вагонетки на загрузочных отверстиях коксовой печи
Автори російськоюКнох Ральф, Шюкер Франц-Йозеф
МПК / Мітки
МПК: C10B 31/00, C10B 41/00
Мітки: спосіб, отворах, завантажувальних, коксової, вуглезавантажувальної, позиціонування, блоків, печі, пристрій, вагонетки, обслуговування
Код посилання
<a href="https://ua.patents.su/7-102842-sposib-ta-pristrijj-pozicionuvannya-blokiv-obslugovuvannya-vuglezavantazhuvalno-vagonetki-na-zavantazhuvalnikh-otvorakh-koksovo-pechi.html" target="_blank" rel="follow" title="База патентів України">Спосіб та пристрій позиціонування блоків обслуговування вуглезавантажувальної вагонетки на завантажувальних отворах коксової печі</a>
Пристрій для підйому кришок завантажувальних отворів коксової печі та очищення завантажувальних отворів
Номер патенту: 98998
Опубліковано: 10.07.2012
Автори: Кнох Ральф, Шюкер Франц-Йозеф
МПК: C10B 25/24, C10B 43/00, C10B 31/00
Мітки: пристрій, отворів, коксової, печі, підйому, кришок, очищення, завантажувальних
Формула / Реферат:
1. Пристрій пристосований для розташування на вуглезавантажувальній вагонетці, призначений для підйому кришок завантажувальних отворів (13) в склепінні коксової печі і для очищення завантажувальних отворів, який включає кришкопідйомник (3), що містить кронштейн (4) з підйомним магнітом (5), очищувач (6), що містить кронштейн (4') з очищувальною головкою (7), і підйомні пристрої (8, 8') для вертикального переміщення кронштейнів (4, 4')...
Пристрій для ущільнення кришок завантажувальних люків коксової печі
Номер патенту: 6122
Опубліковано: 29.12.1994
Автори: Каліберда Микола Стефанович, Поролов Володимир Васильович, Сєнічкін Анатолій Федорович
МПК: C10B 25/00
Мітки: пристрій, ущільнення, коксової, печі, завантажувальних, кришок, люків
Формула / Реферат:
1. Устройство для уплотнения крышек загрузочных люков коксовой печи, включающее распределительное кольцо, установленное на люкосьеме, резервуар с мешалкой для раствора, установленный на портале углезагрузочной машины, и дозатор для выдачи определенного объема раствора из резервуара в распредилительное кольцо, отличающееся тем, что, с целью повышения эксплуатационной надежности устройства, дозатор выполнен в виде соединенной с нижней...
Пристрій для знімання та встановлення кришок завантажувальних люків коксової печі
Номер патенту: 12032
Опубліковано: 25.12.1996
Автори: Бугров Лев Михайлович, Скрипниченко Віктор Григорович, Марапулець Генадій Миколайович, Давиденко Володимир Михайлович, Зубець Олександр Тихонович
МПК: C10B 25/00
Мітки: люків, знімання, коксової, печі, кришок, встановлення, пристрій, завантажувальних
Формула / Реферат:
1. Устройство для съема и установки крышек загрузочных люков коксовых печей, включающее корпус с подвижно установленным на нем электромагнитом, вертикальный шток, закрепленный на корпусе и помещенный в трубчатую направляющую, привод штока и систему рычагов и тяг, кинематически связывающую привод со штоком, отличающееся тем, что, с целью упрощения конструкции и повышения эффективности его работы, устройство снабжено электровибратором...
Пристрій для завантажування вугільної шихти в камеру коксової печі
Номер патенту: 77911
Опубліковано: 15.01.2007
Автори: Каліберда Микола Стефанович, Будяк Сергій Васильович
МПК: C10B 31/00
Мітки: шихти, завантажування, коксової, печі, пристрій, вугільної, камеру
Формула / Реферат:
1. Пристрій для завантажування вугільної шихти в камеру коксової печі, що містить змонтовані на порталі вуглезавантажувальної машини бункери для вугільної шихти, кожний з яких у нижній частині обладнаний механізмом для подачі вугільної шихти, виконаним у вигляді встановлених у корпусі двох чарункових живильників, що синхронно обертаються в різні сторони, причому кожен живильник розділений принаймні на чотири рівні за об'ємом чарунки, одна або...
Пристрій для завантажування вугільної шихти в камеру коксової печі
Номер патенту: 66102
Опубліковано: 15.08.2005
Автори: Каліберда Микола Стефанович, Гайворонський Геннадій Олександрович
МПК: C10B 31/00
Мітки: печі, коксової, завантажування, шихти, камеру, вугільної, пристрій
Формула / Реферат:
Спосіб лікування геморою включає гемороїдектомію, яку починають з внутрішнього гемороїдального вузла розміщеного на 11-й год. Проводять поетапну дивульсію і розтягнення заднього проходу. На ніжку внутрішніх гемороїдальних вузлів накладають затискачі вище зубчатої лінії. Після прошивання і перев'язування ніжки вузлів її пересікають під гострим кутом до стінки прямої кишки, формують куксу відсіченого гемороїдального вузла. Рештки слизової...
Попередній патент: Армована колючо-різальна стрічка з композиційних матеріалів
Наступний патент: Спосіб виробництва щонайменше однієї сполуки-похідної етилену
Випадковий патент: Пристрій кантування для складання головних блоків космічних ракет