Штангенциркуль тарований


Формула / Реферат
Штангенциркуль тарований складається з вимірювальної штанги з нерухомо вимірювальною губкою та рухомої рамки з рухомою вимірювальної губкою, відлікового пристрою, пристрою тарованого зусилля з пружним елементом, який відрізняється тим, що виключно на рухомій рамці встановлено пристрій тарованого зусилля, виконаний у вигляді корпусу з нерухомою тактильною поверхнею, яка суміжна з рухомою тактильною поверхнею, встановленою на тарованому пружному елементі, з яким також пов'язано зумер.
Текст
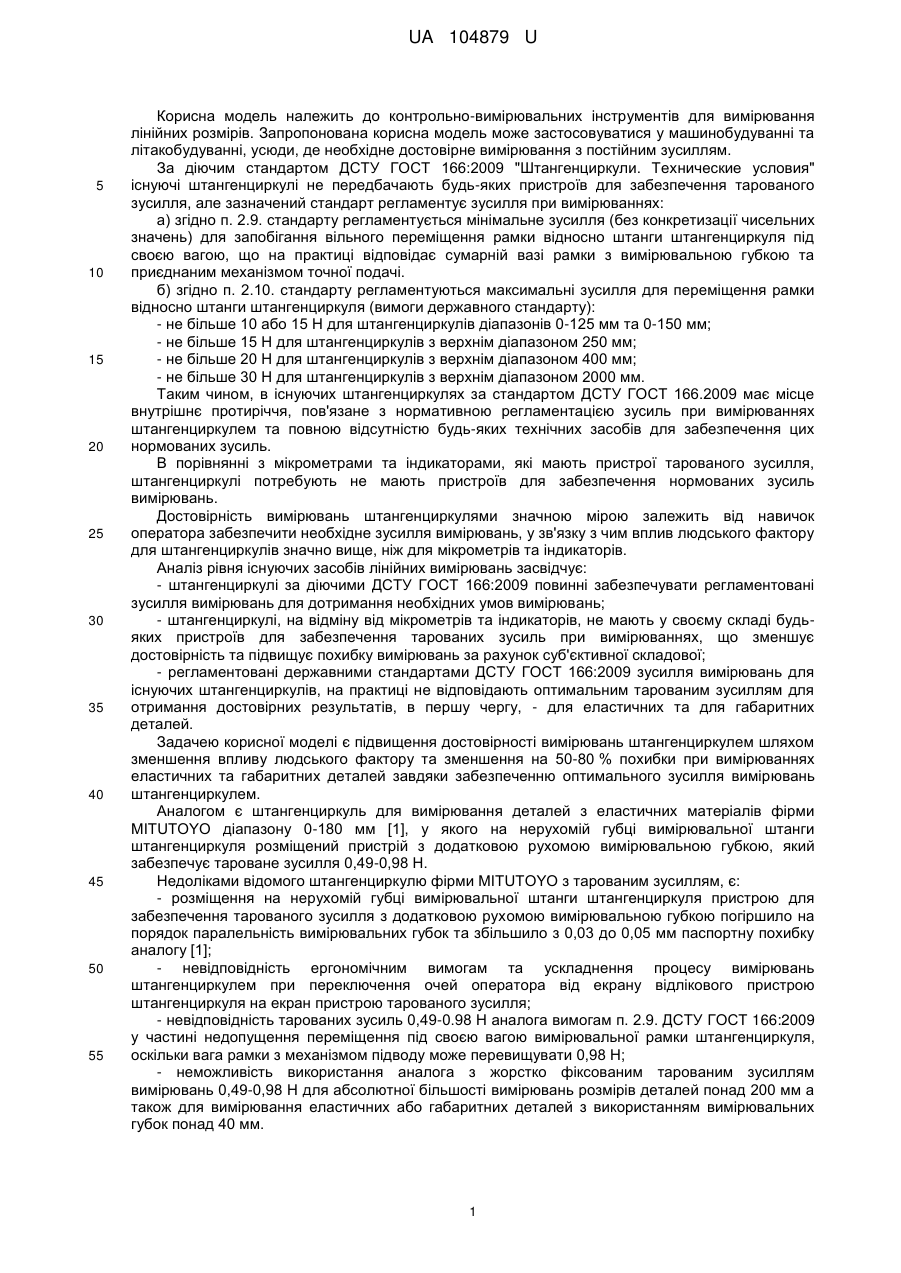
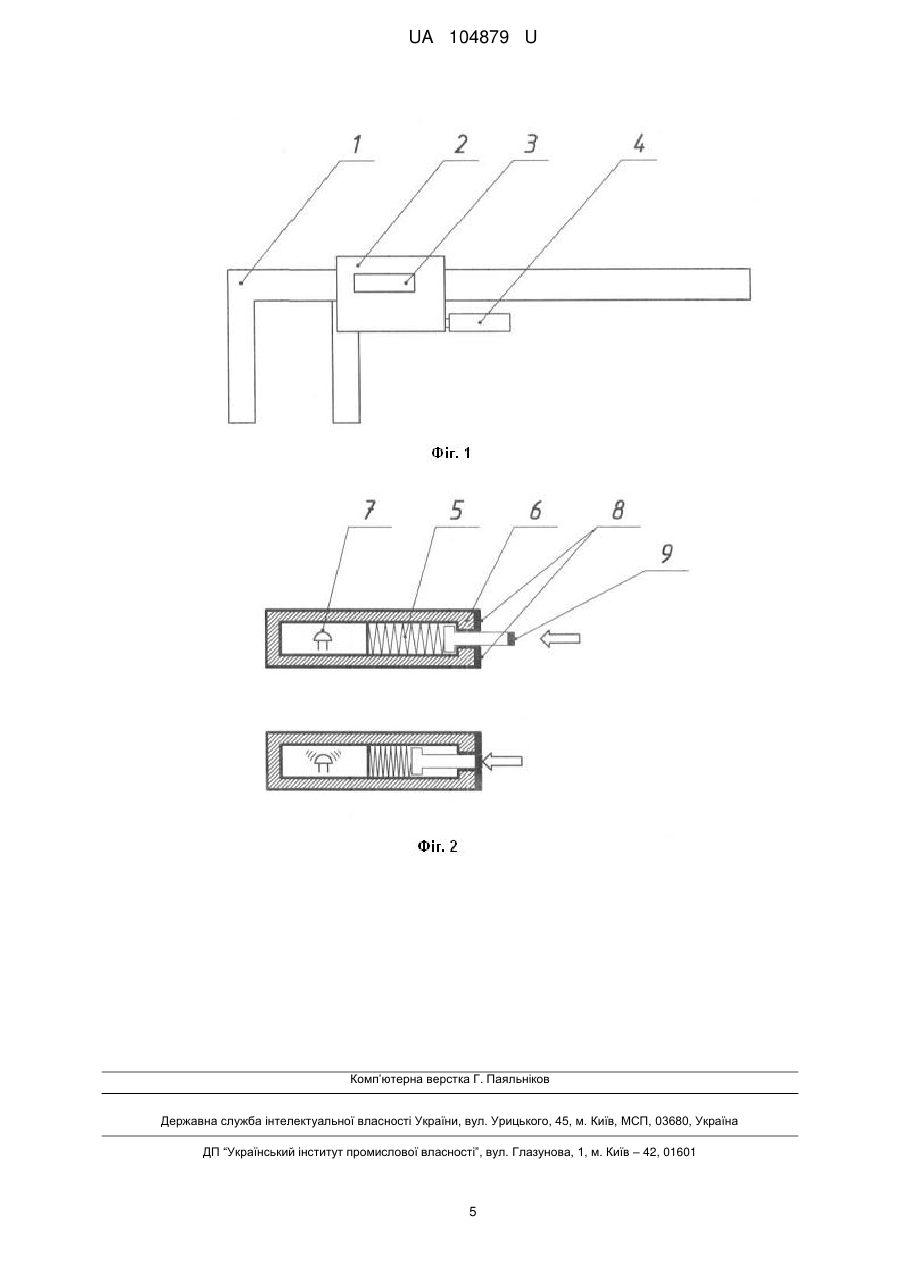
Реферат: UA 104879 U UA 104879 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до контрольно-вимірювальних інструментів для вимірювання лінійних розмірів. Запропонована корисна модель може застосовуватися у машинобудуванні та літакобудуванні, усюди, де необхідне достовірне вимірювання з постійним зусиллям. За діючим стандартом ДСТУ ГОСТ 166:2009 "Штангенциркули. Технические условия" існуючі штангенциркулі не передбачають будь-яких пристроїв для забезпечення тарованого зусилля, але зазначений стандарт регламентує зусилля при вимірюваннях: а) згідно п. 2.9. стандарту регламентується мінімальне зусилля (без конкретизації чисельних значень) для запобігання вільного переміщення рамки відносно штанги штангенциркуля під своєю вагою, що на практиці відповідає сумарній вазі рамки з вимірювальною губкою та приєднаним механізмом точної подачі. б) згідно п. 2.10. стандарту регламентуються максимальні зусилля для переміщення рамки відносно штанги штангенциркуля (вимоги державного стандарту): - не більше 10 або 15 Н для штангенциркулів діапазонів 0-125 мм та 0-150 мм; - не більше 15 Н для штангенциркулів з верхнім діапазоном 250 мм; - не більше 20 Н для штангенциркулів з верхнім діапазоном 400 мм; - не більше 30 Н для штангенциркулів з верхнім діапазоном 2000 мм. Таким чином, в існуючих штангенциркулях за стандартом ДСТУ ГОСТ 166.2009 має місце внутрішнє протиріччя, пов'язане з нормативною регламентацією зусиль при вимірюваннях штангенциркулем та повною відсутністю будь-яких технічних засобів для забезпечення цих нормованих зусиль. В порівнянні з мікрометрами та індикаторами, які мають пристрої тарованого зусилля, штангенциркулі потребують не мають пристроїв для забезпечення нормованих зусиль вимірювань. Достовірність вимірювань штангенциркулями значною мірою залежить від навичок оператора забезпечити необхідне зусилля вимірювань, у зв'язку з чим вплив людського фактору для штангенциркулів значно вище, ніж для мікрометрів та індикаторів. Аналіз рівня існуючих засобів лінійних вимірювань засвідчує: - штангенциркулі за діючими ДСТУ ГОСТ 166:2009 повинні забезпечувати регламентовані зусилля вимірювань для дотримання необхідних умов вимірювань; - штангенциркулі, на відміну від мікрометрів та індикаторів, не мають у своєму складі будьяких пристроїв для забезпечення тарованих зусиль при вимірюваннях, що зменшує достовірність та підвищує похибку вимірювань за рахунок суб'єктивної складової; - регламентовані державними стандартами ДСТУ ГОСТ 166:2009 зусилля вимірювань для існуючих штангенциркулів, на практиці не відповідають оптимальним тарованим зусиллям для отримання достовірних результатів, в першу чергу, - для еластичних та для габаритних деталей. Задачею корисної моделі є підвищення достовірності вимірювань штангенциркулем шляхом зменшення впливу людського фактору та зменшення на 50-80 % похибки при вимірюваннях еластичних та габаритних деталей завдяки забезпеченню оптимального зусилля вимірювань штангенциркулем. Аналогом є штангенциркуль для вимірювання деталей з еластичних матеріалів фірми MITUTOYO діапазону 0-180 мм [1], у якого на нерухомій губці вимірювальної штанги штангенциркуля розміщений пристрій з додатковою рухомою вимірювальною губкою, який забезпечує тароване зусилля 0,49-0,98 Н. Недоліками відомого штангенциркулю фірми MITUTOYO з тарованим зусиллям, є: - розміщення на нерухомій губці вимірювальної штанги штангенциркуля пристрою для забезпечення тарованого зусилля з додатковою рухомою вимірювальною губкою погіршило на порядок паралельність вимірювальних губок та збільшило з 0,03 до 0,05 мм паспортну похибку аналогу [1]; - невідповідність ергономічним вимогам та ускладнення процесу вимірювань штангенциркулем при переключення очей оператора від екрану відлікового пристрою штангенциркуля на екран пристрою тарованого зусилля; - невідповідність тарованих зусиль 0,49-0.98 H аналога вимогам п. 2.9. ДСТУ ГОСТ 166:2009 у частині недопущення переміщення під своєю вагою вимірювальної рамки штангенциркуля, оскільки вага рамки з механізмом підводу може перевищувати 0,98 Н; - неможливість використання аналога з жорстко фіксованим тарованим зусиллям вимірювань 0,49-0,98 H для абсолютної більшості вимірювань розмірів деталей понад 200 мм а також для вимірювання еластичних або габаритних деталей з використанням вимірювальних губок понад 40 мм. 1 UA 104879 U 5 10 15 20 25 30 35 40 45 50 55 60 Найближчим аналогом було вибрано штангенциркуль тарований відомої швейцарської фірми Silvac мод. UL4 з пристроєм тарованого зусилля [2], який має конструктивні особливості: - пристрій тарованого зусилля вимірювань розміщено виключно на вимірювальній штанзі штангенциркуля та має додатковий механізм фіксації на штанзі; - пристрій тарованого зусилля вимірювань розміщено окремо від рухомої рамки штангенциркуля, з якою поєднаний механічно; - перед зчитуванням показників вимірювань штангенциркулю оператор додатково дивиться на додатковий екран пристрою тарованого зусилля. Недоліками відомого штангенциркулю мод. UL4 фірми Silvac є: - необхідність додаткової фіксації пристрою тарованого зусилля на вимірювальній штанзі штангенциркулю; - збільшення довжини вимірювальної штанги штангенциркулю за рахунок розміщення на ній пристрою тарованого зусилля; - невідповідність ергономічним вимогам та ускладнення візуального зчитування показників вимірювань з екрану відлікового пристрою штангенциркулю тарованого у разі додаткового візуального зчитування показників зусиль з додаткового екрану пристрою тарованого зусилля вимірювань прототипу корисної моделі. Суть запропонованої корисної моделі полягає у наступному: - штангенциркуль тарований має пристрій тарованого зусилля з пружним елементом для забезпечення оптимального зусилля вимірювань, який розташовано виключно на вимірювальній рамці штангенциркулю, що не збільшує габарити відлікової шкали; - пристрій тарованого зусилля штангенциркулю забезпечує оптимальні ергономічні умови використання штангенциркуля завдяки тактильним та звуковим сигналам про досягнення необхідного зусилля вимірювань, що ніяким чином не відвертає очей від екрану відлікового пристрою штангенциркуля; - пристрій тарованого зусилля вимірювань завдяки заміні та встановленню відповідних пружних елементів дозволяє встановлювати (практично без обмежень) необхідні зусилля вимірювань штангенциркулем, оптимальні до умов вимірювань. Штангенциркуль тарований складається з вимірювальної штанги 1 з нерухомою вимірювальною губкою та рухомої рамки 2 з рухомою вимірювальною губкою, відлікового пристрою 3, пристрою тарованого зусилля 4 з пружним елементом 5, при цьому відрізняється від відомого прототипу штангенциркуля тарованого тим, що виключно на рухомій рамці 2 встановлено пристрій тарованого зусилля 4 у вигляді корпусу 6 з нерухомою тактильною поверхнею 8, яка суміжна з рухомою тактильною поверхнею 9, встановленою на тарованому пружному елементі 5, з якими також поєднано зумер 7 (див. Фіг. 1, Фіг. 2). Пружний елемент 5 пристрою тарованого зусилля 4 може бути виконаний у вигляді металевої або неметалевої еластичної пружини, тарованого пневматичного або гідравлічного демпферу необхідних єдиних розмірів з можливістю їх заміни для забезпечення оптимальних зусиль вимірювань штангенциркулем. У початковому положенні, нерухома тактильна поверхня 8 та рухома тактильна поверхня 9 розміщені суміжно у різних рівнях паралельно одна до одної (див. Фіг 2), при цьому рекомендовано: - подушка пальця оператора мас торкатися виключно рухомої тактильної поверхні 9; - площі тактильних поверхонь 8 та 9 мають бути близькими за розмірами, 1-3 кв. см, кожна, що забезпечує найкраще тактильне порівняння при дотику пальця оператора. Використання відповідного пальця оператором для керування пристроєм тарованого зусилля 4 залежить виключно від уподобань оператора: - великий палець на руці є найбільш міцним та забезпечує найбільше натискання; - вказівний палець на руці є найбільш гнучким та вживаним у побуті; - подушка середнього пальця є найбільш чутливою на тактильний дотик. При подальшому натисканні пальцем оператора на рухому тактильну поверхню 9 пружний елемент 5 деформується, забезпечуючи необхідне тароване зусилля вимірювань, коли площина тактильної рухомої поверхні 9 наближається до площини нерухомої тактильної поверхні 8 до повного поєднання у єдину площину (при цьому палець оператора відчуває повний механічний контакт з обома тактильними поверхнями, нерухомою 8 та рухомою 9), про досягнення оптимального зусилля вимірювань також сигналізує звуковий зумер 7. Отримавши тактильний сигнал від повного тактильного дотику пальця оператора з обома тактильними поверхнями (нерухомою 8 та рухомою 9) та почувши відповідний звуковий сигнал зумера 7, оператор припиняє подальше натискання на рухому тактильну поверхню 9 пристрою тарованого зусилля 4, а тільки утримує необхідне оптимальне зусилля вимірювань 2 UA 104879 U 5 10 15 20 25 30 35 40 45 50 55 штангенциркуля тарованого (про це свідчить знаходження обох тактильних поверхонь 8 та 9 у єдиній площині). Корисна модель штангенциркулю тарованого може бути виконана у кількох конструктивних варіантах: - штангенциркуль тарований з пристроєм тарованого зусилля 4, який вбудовано у рухому рамку 2 штангенциркуля з можливістю отримання, тільки разом, як тактильних так і звукових сигналів досягнення оптимального зусилля вимірювань; - штангенциркуль тарований з пристроєм тарованого зусилля 4, який вбудовано у рухому рамку 2 штангенциркуля з можливістю отримання, окремо один від одного, або тактильних або звукових сигналів досягнення оптимального зусилля вимірювань; - штангенциркуль тарований, у якого пристрій тарованого зусилля 4 закріплено зовні на рухомій рамці 2 штангенциркуля з можливістю отримання, тільки разом, як тактильних так і звукових сигналів досягнення оптимального зусилля вимірювань; - штангенциркуль тарований, у якого пристрій тарованого зусилля 4 закріплено зовні на рухомій рамці 2 штангенциркуля з можливістю отримання, окремо один від одного, або тактильних або звукових сигналів досягнення оптимального зусилля вимірювань. З урахуванням фізико-механічних особливостей та розмірів вимірювальних деталей корисна модель "Штангенциркулю тарованого" забезпечує будь-які оптимальні таровані зусилля вимірювань з використанням змінних пружних елементів 5 (0,1-100 11) відповідно до умов використання штангенциркулю. Виходячи з багаторічного практичного досвіду виробництва штангенциркулів нами рекомендовано використовувати наступні оптимальні номінали зусиль пружних елементів корисної моделі "Штангенциркулю тарованого": - зусилля в 0,5-3 Н для вимірювання еластичних деталей з використанням вимірювальних губок довжиною до 40 мм; - зусилля 2-12 Н для вимірювання твердих деталей за допомогою вимірювальних губок довжиною 40-60 мм або деталей з еластичних матеріалів за допомогою вимірювальних губок довжиною 40-120 мм; - зусилля в 10-30 Н для вимірювання твердих деталей з використанням вимірювальних губок довжиною 60-160 мм або вимірювання еластичних деталей з використанням вимірювальних губок довжиною 100-250 мм; - зусилля в 25-60 Н для вимірювання твердих деталей з довжиною вимірювальних губок 250-500 мм. Відліковий пристрій 3 корисної моделі може бути виконаний одним з трьох існуючих варіантів: - з аналоговим відліком з використанням штрихових та ноніусних шкал (подібно штангенциркулям типу ШЦ); - з аналоговим відліком з використанням кругової (індикаторної) шкали (подібно до штангенциркулям типу ШЦК); - з цифровим відліком (подібно до штангенциркулів типу ШЦЦ). Вимірювання з використанням корисної моделі штангенциркулю тарованого проводять у наступній послідовності: Встановлюють у пристрій тарованого зусилля 4 необхідний, оптимальний до умов вимірювань штангенциркулю тарованого, змінний пружний елемент 5 з оптимальним тарованим зусиллям; Починають натискати пальцем руки на рухому тактильну поверхню 8 пристрою тарованого зусилля 4 та (через рухому рамку 2 з рухомою губкою) до легкого торкання притискають вимірювальну деталь поміж вимірювальними губками на рамці 2 та штанзі 1 штангенциркулю тарованого; Продовжують натискати пальцем на рухому тактильну поверхню 8 через пружний елемент 5 пристрою тарованого зусилля 4, поки не буде досягнуте необхідне тароване зусилля вимірювань, при цьому рухома тактильна поверхня 8 стає з нерухомою поверхнею 9 у єдиній площині: - про досягнення оптимального зусилля вимірювань сповіщає тактильній сигнал повного дотику до пальця оператора; - про досягнення оптимального зусилля вимірювань сповіщає звуковий сигнал зумера, який сприймають вуха оператора. Після отримання тактильного та звукового сигналу про досягнення необхідного зусилля, оператор припиняє подальше навантаження на тактильну рухому поверхню 8, утримує її у 3 UA 104879 U 5 10 єдиній площині з нерухомою тактильною поверхнею 9 та виконує зчитування значень вимірювань з екрану відлікового пристрою штангенциркуля тарованого. Після закінчення вимірювань штангенциркулем оператор забирає палець з рухомої тактильної поверхні 8 пристрою тарованого зусилля 4 та за допомогою рухомої рамки 2 з рухомою вимірювальною губкою звільняє вимірювальну деталь від затискання поміж вимірювальними губками. У разі проведення повторних вимірювань за допомогою корисної моделі штангенциркулю тарованого необхідно повторити вищезазначені переходи. Відповідно до формули корисної моделі заявником був виготовлений дослідний зразок "Штангенциркулю тарованого" та виконано порівняльний метрологічний аналіз за вагомими показниками в порівнянні з паспортними показниками зазначеними у аналозі [1] та найближчому аналозі [2], зазначено у таблиці. Таблиця Показники штангенциркуля тарованого Діапазон вимірювань, мм Похибка вимірювань, мм Діапазон зусиль вимірювань, Н Сигнал про досягнення зусилля Ціна аналогічного зразка, % 15 20 Значення показників штангенциркулів тарованих Найближчий Корисна модель Аналог аналог 0-4000 0-180 0-3000 0,01 для 0-500 мм 0,05 для 0-180 мм 0,03 для 0-400 мм 0,1-100 0,5-1,0 5-10 тактильний + звуковий 2-й візуальний 2-й візуальний 100 для 0-500мм 350 для 0-180мм 500 для 0-400мм Порівняння корисної моделі з аналогом [1] та з найближчим аналогом [2] підтверджує значні переваги запропонованої корисної моделі. Проведений у таблиці порівняльний аналіз найбільш вагомих параметрів підтверджує можливість практичної реалізації, безумовні техніко-метрологічні та економічні переваги запропонованої корисної моделі. Запропонована корисна модель найкращим чином втілює переваги та розширює можливості групи штангенінструментів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 Штангенциркуль тарований складається з вимірювальної штанги з нерухомо вимірювальною губкою та рухомої рамки з рухомою вимірювальної губкою, відлікового пристрою, пристрою тарованого зусилля з пружним елементом, який відрізняється тим, що виключно на рухомій рамці встановлено пристрій тарованого зусилля, виконаний у вигляді корпусу з нерухомою тактильною поверхнею, яка суміжна з рухомою тактильною поверхнею, встановленою на тарованому пружному елементі, з яким також пов'язано зумер. 4 UA 104879 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01B 3/20
Мітки: тарований, штангенциркуль
Код посилання
<a href="https://ua.patents.su/7-104879-shtangencirkul-tarovanijj.html" target="_blank" rel="follow" title="База патентів України">Штангенциркуль тарований</a>
Штангенциркуль тарований

Номер патенту: 100613
Опубліковано: 10.08.2015
Автор: Крамаренко Сергій Борисович
МПК: G01B 3/20
Мітки: тарований, штангенциркуль
Формула / Реферат:
Штангенциркуль тарований, що складається з вимірювальної штанги з нерухомою губкою, рухомої рамки разом з в відліковим пристроєм та з рухомою губкою, приєднаних до механізму точної подачі, який відрізняється тим, що поміж рухомою рамкою та механізмом точної подачі, розміщено пристрій регульованого тарованого зусилля вимірювань, який забезпечує оптимальне зусилля при вимірюваннях штангенциркулем.
Штангенциркуль голосовий
Номер патенту: 103318
Опубліковано: 10.12.2015
Автор: Крамаренко Сергій Борисович
МПК: G01B 3/20
Мітки: штангенциркуль, голосовий
Формула / Реферат:
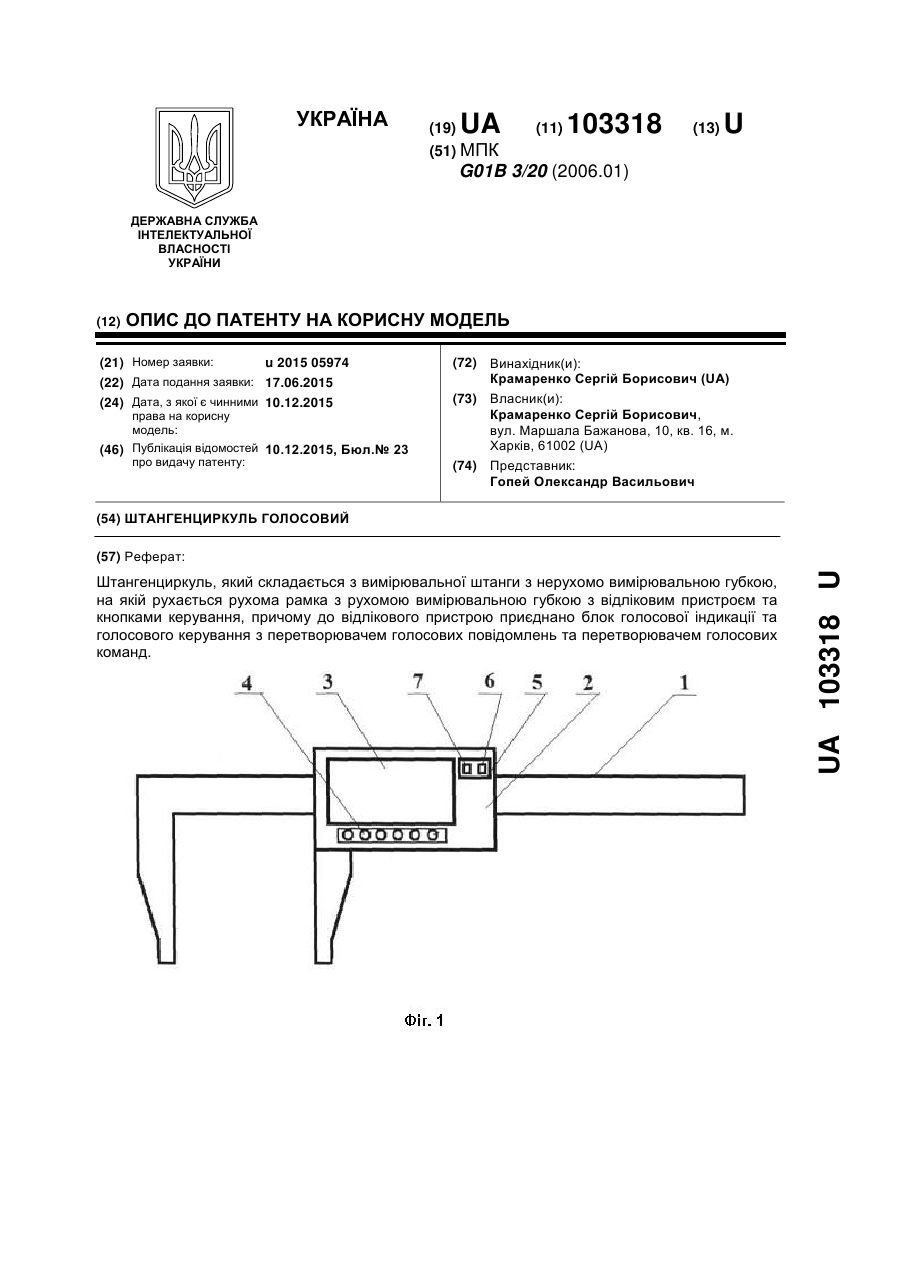
Штангенциркуль, який складається з вимірювальної штанги з нерухомо вимірювальною губкою, на якій рухається рухома рамка з рухомою вимірювальною губкою з відліковим пристроєм та кнопками керування, який відрізняється тим, що до відлікового пристрою приєднано блок голосової індикації та голосового керування з перетворювачем голосових повідомлень та перетворювачем голосових команд.
Штангенциркуль

Номер патенту: 96949
Опубліковано: 25.02.2015
Автор: Крамаренко Борис Павлович
МПК: G01B 3/20
Мітки: штангенциркуль
Формула / Реферат:
Штангенциркуль, що складається з вимірювальної штанги та рамки з відліковим пристроєм зі стопорним гвинтом, який відрізняється тим, що до рамки послідовно закріплена скоба глибиною не менше половини ширини скоби, до іншого кінця скоби послідовно закріплена додаткова рамка з додатковим відліковим пристроєм з додатковим стопорним гвинтом та з додатковою вимірювальною штангою, яка виконана з протилежним напрямком вимірювання співвісно до...
Штангенциркуль

Номер патенту: 71098
Опубліковано: 15.11.2004
Автори: Петровський Валерій Петрович, Омельяненко Дар'я Василівна, Ливицький Іван Миколайович
МПК: G01B 3/20
Мітки: штангенциркуль
Формула / Реферат:
1. Штангенциркуль, що містить штангу, рамку з основним ноніусом та додатковою шкалою, який відрізняється тим, що додаткова шкала виконана у вигляді зубчастої рейки з десятковими ноніусами на кожному зубці, яка розташована у рамці протилежно основному ноніусу, вимірювальні ребра зубців нахилені під гострим кутом до штрихів штанги, штрихи нанесені на всю ширину штанги, а крок зубців дорівнює кроку штрихів основного ноніуса рамки.2....
Штангенциркуль
Номер патенту: 5449
Опубліковано: 15.03.2005
Автор: Гевко Ігор Богданович
МПК: G01B 3/20
Мітки: штангенциркуль
Формула / Реферат:
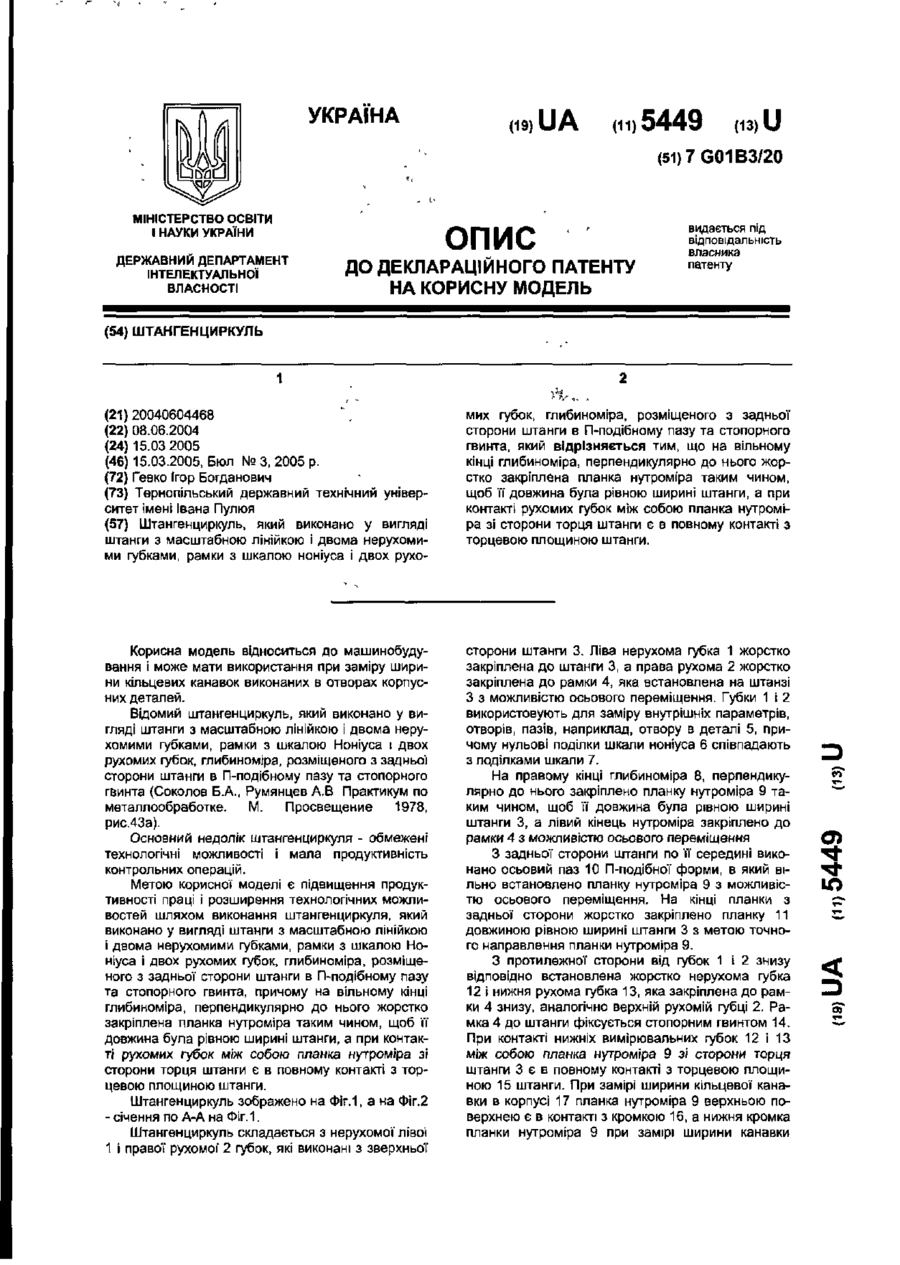
Штангенциркуль, який виконано у вигляді штанги з масштабною лінійкою і двома нерухомими губками, рамки з шкалою ноніуса і двох рухомих губок, глибиноміра, розміщеного з задньої сторони штанги в П-подібному пазу та стопорного гвинта, який відрізняється тим, що на вільному кінці глибиноміра, перпендикулярно до нього жорстко закріплена планка нутроміра таким чином, щоб її довжина була рівною ширині штанги, а при контакті рухомих губок між собою...
Попередній патент: Спосіб одержання електричної енергії на летовищах при посередництві літальних апаратів
Наступний патент: Спосіб прогнозування показників надійності термоелектричного пристрою
Випадковий патент: Просторовий блок покриття