Радіонавігаційна система високошвидкісного наземного транспорту
Номер патенту: 105565
Опубліковано: 25.03.2016
Автори: Скосар Вячеслав Юрійович, Шкіль Юрій Володимирович, Дзензерський Віктор Олександрович, Плаксін Сергій Вікторович
Формула / Реферат
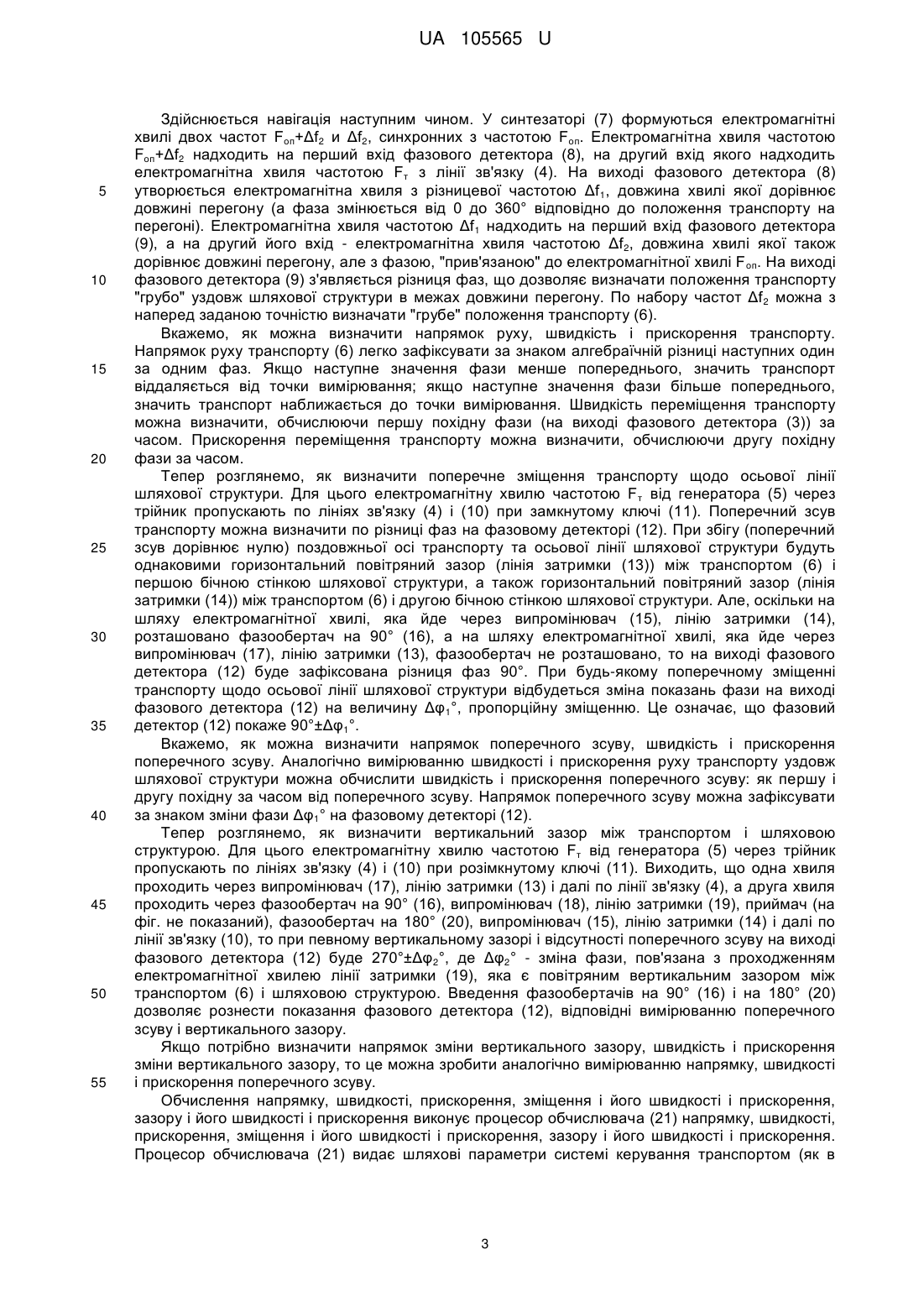
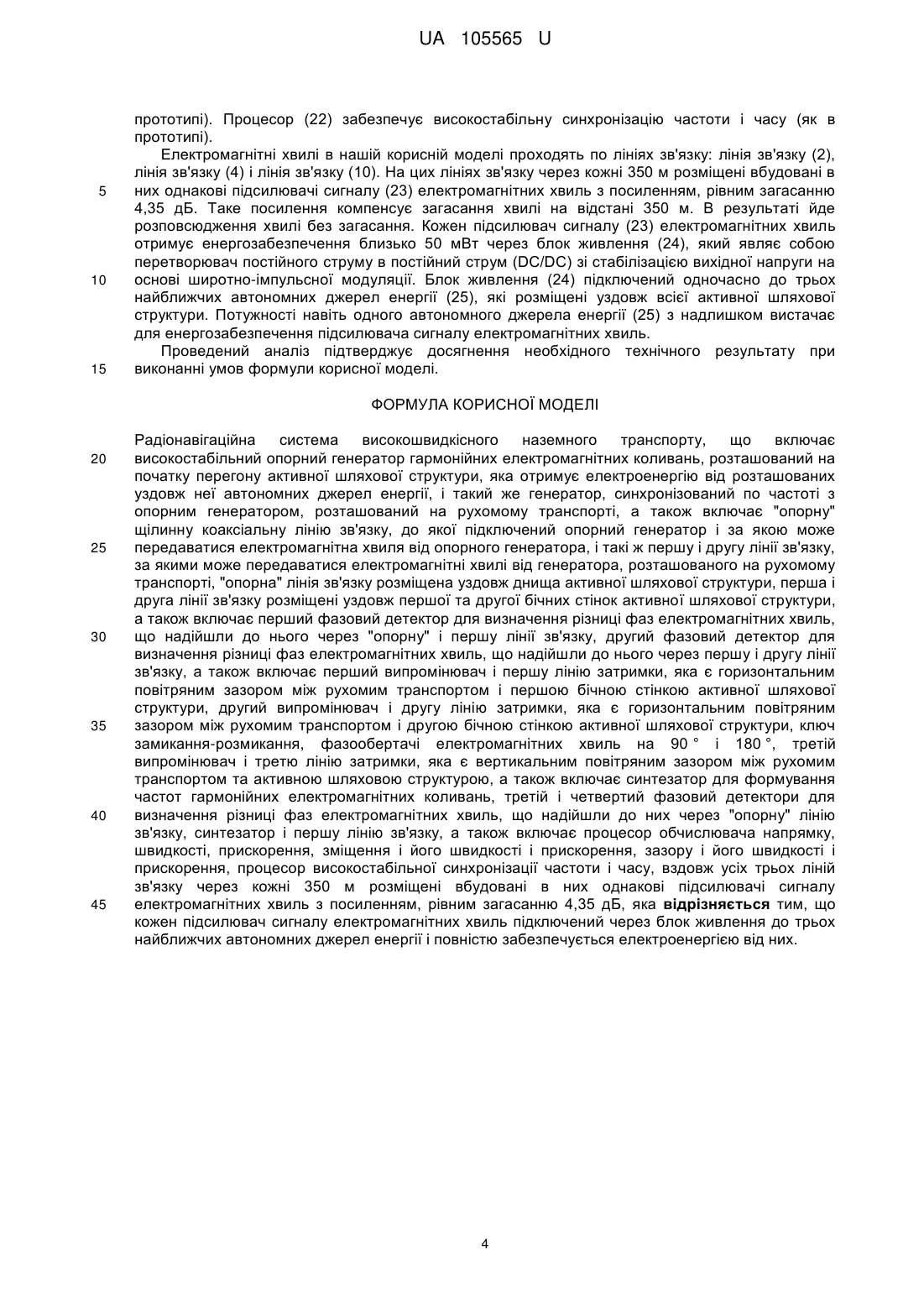
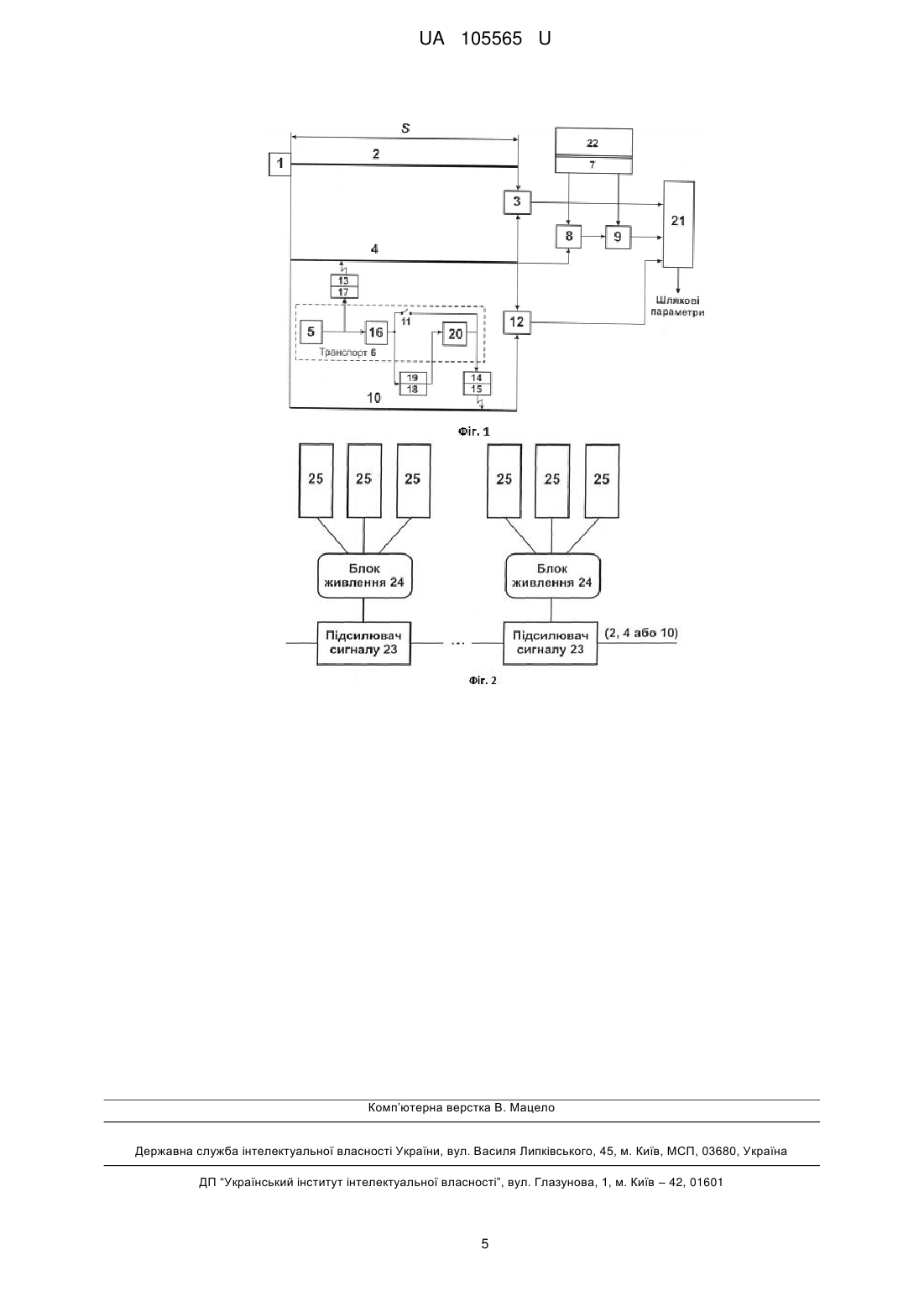
Радіонавігаційна система високошвидкісного наземного транспорту, що включає високостабільний опорний генератор гармонійних електромагнітних коливань, розташований на початку перегону активної шляхової структури, яка отримує електроенергію від розташованих уздовж неї автономних джерел енергії, і такий же генератор, синхронізований по частоті з опорним генератором, розташований на рухомому транспорті, а також включає "опорну" щілинну коаксіальну лінію зв'язку, до якої підключений опорний генератор і за якою може передаватися електромагнітна хвиля від опорного генератора, і такі ж першу і другу лінії зв'язку, за якими може передаватися електромагнітні хвилі від генератора, розташованого на рухомому транспорті, "опорна" лінія зв'язку розміщена уздовж днища активної шляхової структури, перша і друга лінії зв'язку розміщені уздовж першої та другої бічних стінок активної шляхової структури, а також включає перший фазовий детектор для визначення різниці фаз електромагнітних хвиль, що надійшли до нього через "опорну" і першу лінії зв'язку, другий фазовий детектор для визначення різниці фаз електромагнітних хвиль, що надійшли до нього через першу і другу лінії зв'язку, а також включає перший випромінювач і першу лінію затримки, яка є горизонтальним повітряним зазором між рухомим транспортом і першою бічною стінкою активної шляхової структури, другий випромінювач і другу лінію затримки, яка є горизонтальним повітряним зазором між рухомим транспортом і другою бічною стінкою активної шляхової структури, ключ замикання-розмикання, фазообертачі електромагнітних хвиль на 90 ° і 180 °, третій випромінювач і третю лінію затримки, яка є вертикальним повітряним зазором між рухомим транспортом та активною шляховою структурою, а також включає синтезатор для формування частот гармонійних електромагнітних коливань, третій і четвертий фазовий детектори для визначення різниці фаз електромагнітних хвиль, що надійшли до них через "опорну" лінію зв'язку, синтезатор і першу лінію зв'язку, а також включає процесор обчислювача напрямку, швидкості, прискорення, зміщення і його швидкості і прискорення, зазору і його швидкості і прискорення, процесор високостабільної синхронізації частоти і часу, вздовж усіх трьох ліній зв'язку через кожні 350 м розміщені вбудовані в них однакові підсилювачі сигналу електромагнітних хвиль з посиленням, рівним загасанню 4,35 дБ, яка відрізняється тим, що кожен підсилювач сигналу електромагнітних хвиль підключений через блок живлення до трьох найближчих автономних джерел енергії і повністю забезпечується електроенергією від них.
Текст
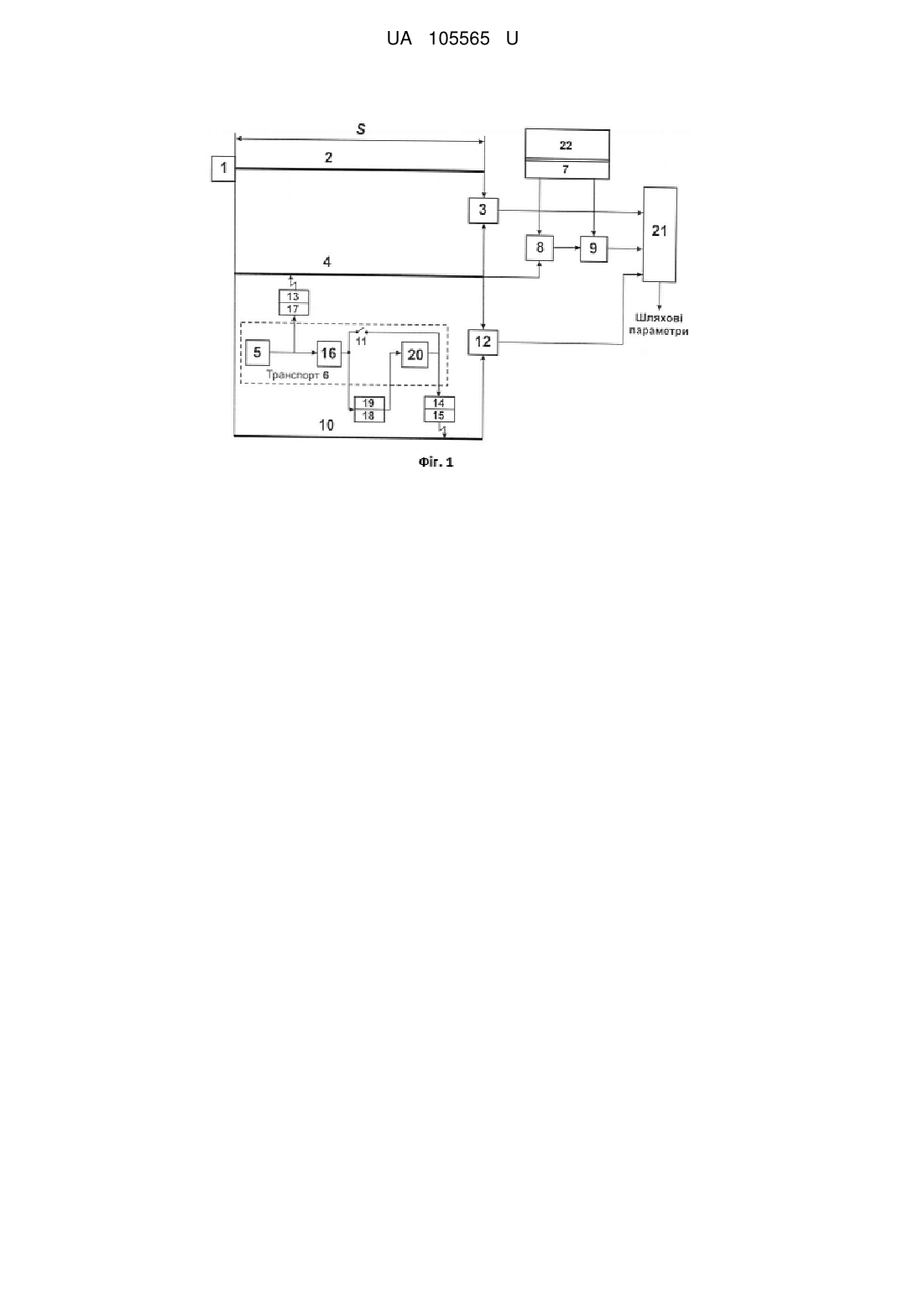
Реферат: Радіонавігаційна система високошвидкісного наземного транспорту містить високостабільний опорний генератор гармонійних електромагнітних коливань, розташований на початку перегону активної шляхової структури, яка отримує електроенергію від розташованих уздовж неї автономних джерел енергії, і такий же генератор, синхронізований по частоті з опорним генератором, розташований на рухомому транспорті. Система також містить "опорну" щілинну коаксіальну лінію зв'язку, до якої підключений опорний генератор і за якою може передаватися електромагнітна хвиля від опорного генератора, і такі ж першу і другу лінії зв'язку, за якими може передаватися електромагнітні хвилі від генератора, розташованого на рухомому транспорті. Система також містить перший фазовий детектор для визначення різниці фаз електромагнітних хвиль, що надійшли до нього через "опорну" і першу лінії зв'язку, другий фазовий детектор для визначення різниці фаз електромагнітних хвиль, що надійшли до нього через першу і другу лінії зв'язку. Система також містить перший випромінювач і першу лінію затримки, яка є горизонтальним повітряним зазором між рухомим транспортом і першою бічною стінкою активної шляхової структури, другий випромінювач і другу лінію затримки, яка є горизонтальним повітряним зазором між рухомим транспортом і другою бічною стінкою активної шляхової структури, ключ замикання-розмикання, фазообертачі електромагнітних хвиль на 90 ° і 180 °, третій випромінювач і третю лінію затримки, яка є вертикальним повітряним зазором між рухомим транспортом та активною шляховою структурою. Система також містить синтезатор для формування частот гармонійних електромагнітних коливань, третій і четвертий фазовий детектори для визначення різниці фаз електромагнітних хвиль, що надійшли до них через "опорну" лінію зв'язку, синтезатор і першу лінію зв'язку. Система також містить процесор обчислювача напрямку, швидкості, прискорення, зміщення і його швидкості і прискорення, зазору і його швидкості і прискорення, процесор високостабільної синхронізації частоти і часу. Вздовж усіх трьох ліній зв'язку через кожні 350 м розміщені вбудовані в них однакові підсилювачі сигналу електромагнітних хвиль з посиленням, рівним загасанню 4,35 дБ. Кожен підсилювач сигналу електромагнітних хвиль підключений через блок живлення до трьох найближчих автономних джерел енергії і повністю забезпечується електроенергією від них. UA 105565 U (12) UA 105565 U UA 105565 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до транспортної техніки, а саме до високошвидкісного наземного транспорту, який використовує потужне електромагнітне поле для магнітного підвісу, з одної сторони, і електротяги, з іншої сторони. Корисна модель належить також до навігаційних систем, які можуть використовуватися для фіксації місцеположення високошвидкісного наземного транспорту. Навігаційні задачі високошвидкісного наземного транспорту вимагають високої точності і надійності рішення поряд з високою швидкістю отримання даних про місцеположення транспортного засобу, що рухається. Найкраще з такими задачами може впоратися радіонавігаційна система, яка використовує фазометричний метод. Тому, як прототип ми вибрали радіонавігаційну систему високошвидкісного наземного транспорту, яка включає високостабільний опорний генератор гармонійних електромагнітних коливань, розташований на початку перегону активної шляхової структури, яка отримує електроенергію від розташованих уздовж неї автономних джерел енергії, і такий же генератор, синхронізований по частоті з опорним генератором, розташований на рухомому транспорті, а також включає "опорну" щілинну коаксіальну лінію зв'язку, до якої підключений опорний генератор і за якою може передаватися електромагнітна хвиля від опорного генератора, і такі ж першу і другу лінії зв'язку, за якими можуть передаватися електромагнітні хвилі від генератора, розташованого на рухомому транспорті, "опорна" лінія зв'язку розміщена уздовж днища активної шляхової структури, перша і друга лінії зв'язку розміщені уздовж першої та другої бічних стінок активної шляхової структури. Радіонавігаційна система також включає перший фазовий детектор для визначення різниці фаз електромагнітних хвиль, що надійшли до нього через "опорну" і першу лінії зв'язку, другий фазовий детектор для визначення різниці фаз електромагнітних хвиль, що надійшли до нього через першу і другу лінії зв'язку, а також включає перший випромінювач і першу лінію затримки, яка є горизонтальним повітряним зазором між рухомим транспортом і першою бічною стінкою активної шляхової структури, другий випромінювач і другу лінію затримки, яка є горизонтальним повітряним зазором між рухомим транспортом і другою бічною стінкою активної шляхової структури, ключ замикання-розмикання, фазообертачі електромагнітних хвиль на 90° і 180°, третій випромінювач і третю лінію затримки, яка є вертикальним повітряним зазором між рухомим транспортом та активною шляховою структурою. Радіонавігаційна система також включає синтезатор для формування частот гармонійних електромагнітних коливань, третій і четвертий фазовий детектори для визначення різниці фаз електромагнітних хвиль, що надійшли до них через "опорну" лінію зв'язку, синтезатор і першу лінію зв'язку, а також включає процесор обчислювача напрямку, швидкості, прискорення, зміщення і його швидкості і прискорення, зазору і його швидкості і прискорення, процесор високостабільної синхронізації частоти і часу. Вздовж усіх трьох ліній зв'язку через кожні 350 м розміщені вбудовані в них однакові підсилювачі сигналу електромагнітних хвиль з посиленням, рівним загасанню 4,35 дБ [Дзензерский В.А., Плаксин С.В., Погорелая Л.М., Толдаев В.Г., Шкиль Ю.В. Системы управления и энергообеспечения магнитолевитирующего транспорта. - Киев: Наук. Думка. - 2014. - 276 с. - С. 46-54, 70, 106]. Прототип дозволяє вирішити задачу навігації з високою швидкістю отримання даних про місцеположення транспортного засобу, що рухається. Але в прототипі не передбачено раціональне енергозабезпечення радіонавігаційної системи високошвидкісного наземного транспорту з урахуванням того факту, що транспорт забезпечується енергією від автономних джерел енергії, які встановлені уздовж активної шляхової структури. Нами вирішувалася задача раціонального і надійного енергозабезпечення радіонавігаційної системи високошвидкісного наземного транспорту. Поставлена задача вирішується тим, що в радіонавігаційній системі - прототипі, згідно з корисною моделлю, кожен підсилювач сигналу електромагнітних хвиль підключений через блок живлення до трьох найближчих автономних джерел енергії і повністю забезпечується електроенергією від них. Суть технічного рішення полягає в тому, що підсилювачі сигналу електромагнітних хвиль, вбудовані в лінії зв'язку і розміщені вздовж них через рівні відстані, отримують раціональне енергозабезпечення від найближчих джерел енергії без необхідності проводки окремої силової лінії уздовж всієї шляхової структури. Для забезпечення надійності кожен підсилювач сигналу електромагнітних хвиль отримує електроенергію не від одного автономного джерела енергії, а відразу від трьох найближчих автономних джерел енергії. У разі виходу з ладу одного автономного джерела енергії і відключення шляхової котушки, що живиться від нього, не відбудеться відмови в роботі високошвидкісного наземного транспорту, оскільки він має досить велику інерцію руху і зможе подолати відключену ділянку шляху (довжиною всього 0,5-2 м). Однак, подібна відмова одного автономного джерела енергії призведе до відмови роботи 1 UA 105565 U 5 10 15 20 25 30 35 40 45 50 55 60 підсилювача сигналу електромагнітних хвиль, якщо він отримує енергозабезпечення від даного автономного джерела енергії. А це може призвести до відмови роботи всієї лінії зв'язку, в яку вбудований підсилювач сигналу електромагнітних хвиль, що відмовив. Ось чому в нашій корисній моделі енергозабезпечення кожного підсилювача сигналу електромагнітних хвиль проводиться від трьох найближчих автономних джерел енергії, одночасна відмова яких вкрай малоймовірна. Наприклад, якщо ймовірність відмови Р одного автономного джерела енергії виражається так: P=α, де α
ДивитисяДодаткова інформація
Назва патенту англійськоюRadio navigation system of a high-speed ground transport
Автори англійськоюDzerenskyi Viktor Oleksandrovych, Plaksin Sergii Viktorovych, Shkil Yurii Volodymyrovych, Skosar Vyacheslav Yuriyovych
Назва патенту російськоюРадионавигационная система высокоскоростного наземного транспорта
Автори російськоюДзензерский Виктор Александрович, Плаксин Сергей Викторович, Шкиль Юрий Владимирович, Скосар Вячеслав Юрьевич
МПК / Мітки
МПК: B61L 25/02, B61L 13/04, B61B 13/08
Мітки: радіонавігаційна, система, транспорту, високошвидкісного, наземного
Код посилання
<a href="https://ua.patents.su/7-105565-radionavigacijjna-sistema-visokoshvidkisnogo-nazemnogo-transportu.html" target="_blank" rel="follow" title="База патентів України">Радіонавігаційна система високошвидкісного наземного транспорту</a>
Супутникова радіонавігаційна система

Номер патенту: 84704
Опубліковано: 25.11.2008
Автор: Матвієнко Сергій Анатолійович
МПК: G01S 5/14
Мітки: система, радіонавігаційна, супутникова
Формула / Реферат:
Супутникова радіонавігаційна система, що містить орбітальне угруповання навігаційних космічних апаратів, контрольно-коригувальну станцію, що містить наземну навігаційну апаратуру й опорний приймальний пристрій, що містить формувач диференціальних виправлень, і апаратуру споживача, що включає приймач радіонавігаційних сигналів і блок обробки навігаційних сигналів, яка відрізняється тим, що до приймача навігаційних сигналів підключений...
Супутникова радіонавігаційна система
Номер патенту: 90960
Опубліковано: 10.06.2010
Автор: Матвієнко Сергій Анатолійович
МПК: G01S 5/14
Мітки: система, супутникова, радіонавігаційна
Формула / Реферат:
Супутникова радіонавігаційна система, що містить орбітальне угруповання навігаційних космічних апаратів (1), контрольно-коригувальну станцію (3), до складу якої входить наземна навігаційна апаратура, з'єднана (4) з опорним приймальним пристроєм (5), який містить формувач диференціальних виправлень (9), з'єднаний з еталонним приймачем навігаційних сигналів (8), та гравіметр (10), які з'єднані з обчислювальним пристроєм (11), α також...
Пристрій для аеродинамічного моделювання направляючої колії наземного транспорту
Номер патенту: 18385
Опубліковано: 25.12.1997
Автори: Торбенко Анатолій Іванович, Флакс Леонід Моїсейович, Заславський Броніслав Леонідович, Карпекін Володимир Якович
МПК: G01M 9/00, G01M 17/00
Мітки: направляючої, колії, наземного, моделювання, пристрій, аеродинамічного, транспорту
Формула / Реферат:
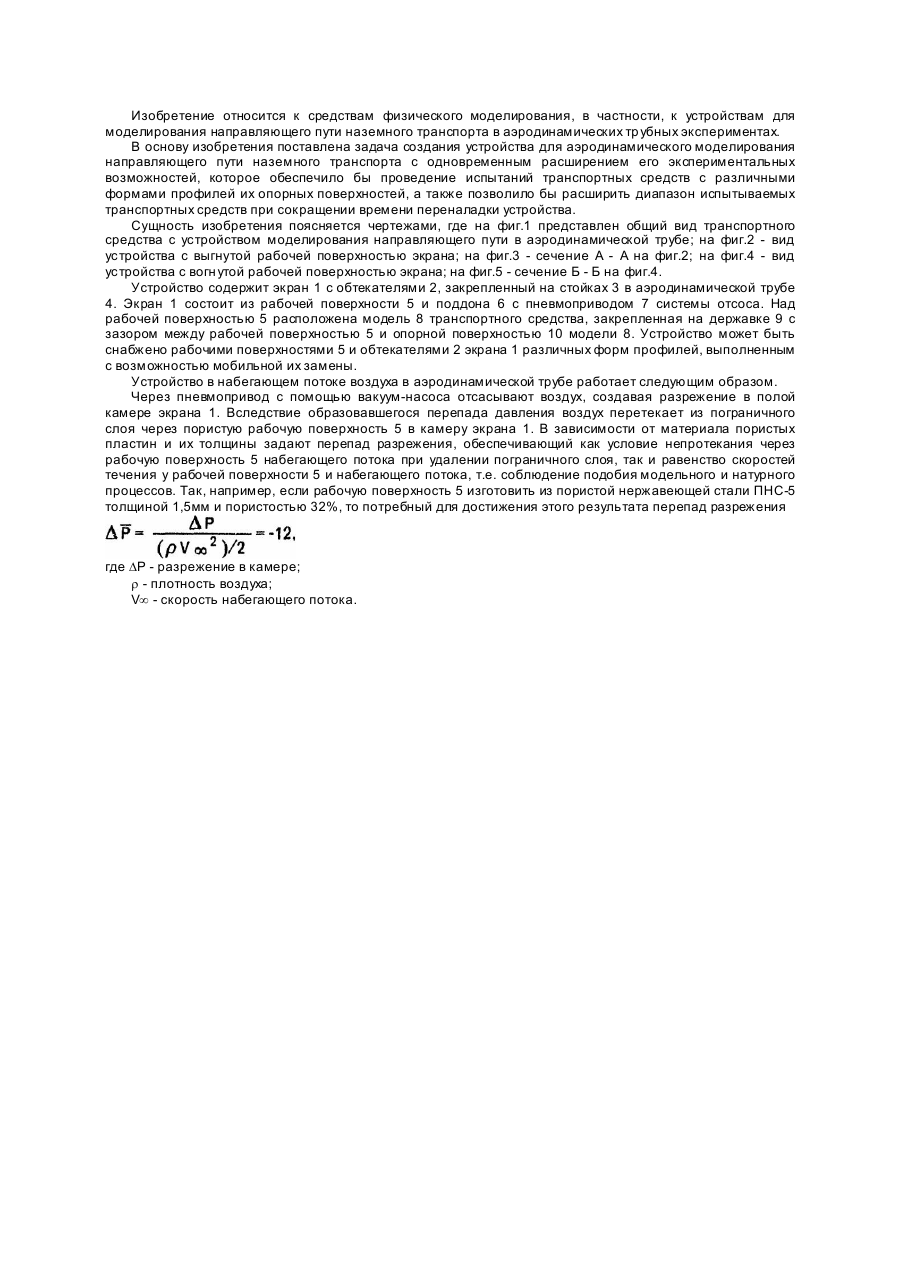
1. Устройство для аэродинамического моделирования направляющего пути наземного транспорта, содержащее закрепленный на стойках внутри аэродинамической трубы (АДТ) экран с обтекателями, расположенный с зазором под опорной поверхностью закрепленной на державке модели испытываемого транспортного средства, и пневмопривод системы отсоса, отличающееся тем, что экран выполнен в виде полой камеры с рабочей поверхностью и поддоном, причем пневмопривод...
Радіонавігаційна система
Номер патенту: 28443
Опубліковано: 10.12.2007
Автори: Якобінчук Олександр Вікторович, Блаженний Валерій Іванович, Слєпов Лев Іванович, Куровська Тетяна Юріївна
МПК: G01S 3/00
Мітки: радіонавігаційна, система
Формула / Реферат:
Радіонавігаційна система, що містить приводну радіостанцію, встановлену на аеродромі, приймач радіонавігаційних сигналів, при цьому приймач радіонавігаційних сигналів встановлено на рухомий об'єкт, яка відрізняється тим, що додатково містить три або більше базових станцій стільникового зв'язку, приймач радіосигналів від базових станцій стільникового зв'язку, при цьому приймач радіосигналів від базових станцій стільникового зв'язку встановлено...
Локальна радіонавігаційна система

Номер патенту: 68960
Опубліковано: 16.08.2004
Автори: Мосов Сергій Петрович, Кравченко Юрій Васильович, Машков Олег Альбертович, Савченко Віталій Анатолійович
МПК: G01S 5/02
Мітки: локальна, система, радіонавігаційна
Формула / Реферат:
Локальна радіонавігаційна система, що містить сукупність приймачів радіонавігаційних сигналів від глобальної навігаційної супутникової системи, встановлених на рухомих об'єктах, мережу випромінювачів радіонавігаційних сигналів, встановлених на навігаційних космічних апаратах та один або декілька стаціонарних наземних випромінювачів, яка відрізняється тим, що система додатково містить мережу випромінювачів радіонавігаційних сигналів,...
Попередній патент: Спосіб дезактивації високосольових радіоактивних розчинів кристалізацією з отриманням монолітного кристалічного осаду в безперервному режимі
Наступний патент: Каркасна стінова панель з віконним отвором
Випадковий патент: Пристрій ущільнювання для системи регулювання температури продуктів розміщених на піддоні