Пристрій для управління стріловим краном
Номер патенту: 10656
Опубліковано: 25.12.1996
Автори: Маш Дмитро Матвійович, Кошелюк Роман Євгенович, Кушнір Юрій Євгенович
Формула / Реферат
1. Пристрій для управління стріловим краном, який містить датчики навантаження, довжини, кута нахилу і повороту стріли, під'єднані виходами до входів блоку визначення допустимого вильоту стріли за навантаженням, блок порівняння, вихід якого зв'язаний через блок посилювачів з виконавчим блоком, блок задания допустимих координат вантажо-захоплювального органу та блок визначення проекції стріли на горизонтальну площину, входи якого під'єднані до датчиків довжини та нахилу стріли, що відрізняється тим, що він має блок задания початкових координат вантажозахоплювального органу, блок корекції допустимих координат, блок визначення фактичних координат вантажо-захоплювального органу, входи якого з'єднані з виходами відповідно блоку визначення проекції стріли на горизонтальну площину, блоку задания початкових координат вантажозахоплювального органу, блоку задания допустимих координат і датчика повороту стріли, а вихід під'єднаний до одного із входів блоку порівняння, другий вхід якого з'єднаний з виходом блоку корекції допустимих координат, один із виходів якого з'єднаний з виходом блоку визначення допустимого вильоту стріли за навантаженням, а другий вхід - з виходом блоку задания допустимих координат вантажозахоплювального органу, причому блок корекції допустимих координат містить елемент вибору найменшого значення, елементи І, НІ, АБО виходом останнього з яких утворений вихід блоку, входом одного із елементів І та одним із входів елементу вибору найменшого значення утворений другая виход блоку, перший вхід якого утворений одним із входів другого елементу І та другим входом елементу вибору найменшого значення, вихід якого з'єднаний з другим входом другого елементу І та входом елементу НІ, вихід якого під'єднаний до другого входу першого елементу І, вихід якого під'єднаний до одного із входів елементу АБО, другий вхід якого з'єднаний з виходом другого елементу І, а блок визначення фактичних координат вантажозахоплювального органу містить множувач, виходом якого утворений вихід блоку, функціональний перетворювач, суматори, входами одного з яких утворені перший і другий входи блоку, а вихід цього суматора з'єданий з одним із входів перемножувача, другий вхід якого під'єднаний до входу функціонального перетворювача, вхід якого з'єднаний з виходом другого суматора, входами якого утворені третій і четвертий входи блоку.
2. Пристрій по п. 1, що відрізняється тим, що він має датчик кількості тросу на барабані вантажної лебідки, блок визначення проекції стріли на вертикальну площину, а блок корекції допустимих координат додатково має суматор, входом якого утворений третій вхід блоку, під'єднаний до виходу блоку задания початкових координат, другим входом суматора утворений згаданий другий вхід блоку, а виходом суматора другий вихід блоку, який під'єднаний до першого входу другого каналу блоку порівняння, причому блок визначення фактичних координат має додатковий суматор, одним входом якого утворений п'ятий вхід блоку, з'єднаний з датчиком кількості тросу на барабані вантажної лебідки, другим входом - шостий вхід блоку, під'єднаний до виходу блоку визначення проекції стріли на вертикальну площину, входи якого під'єнані до датчиків довжини та кута нахилу стріли, а третім входом третього суматора утворений згаданий другий вхід блоку, а виходом -другий вихід блоку, під'єднаний до другого входу другого каналу блоку порівняння.
3. Пристрій по пп. 1 та 2, що відрізняється тим, що він має ввімкнені між згаданими блоком порівняння і блоком швидкості і блок порівняння швидкостей, під'єднаний до другого входу блоку порівняння швидкостей блок визначення фактичної швидкості, до входів якого під'єднані згадані виходи датчиків довжини, кута нахилу та повороту стріли і датчик кількості тросу на барабані вантажної лебідки,і під'єднані до інших входів блоку визначення допустимої швидкості задатчики швидкостей телескопування, кутового переміщення стріли, повороту стріли і обертання вантажної лебідки.
Текст
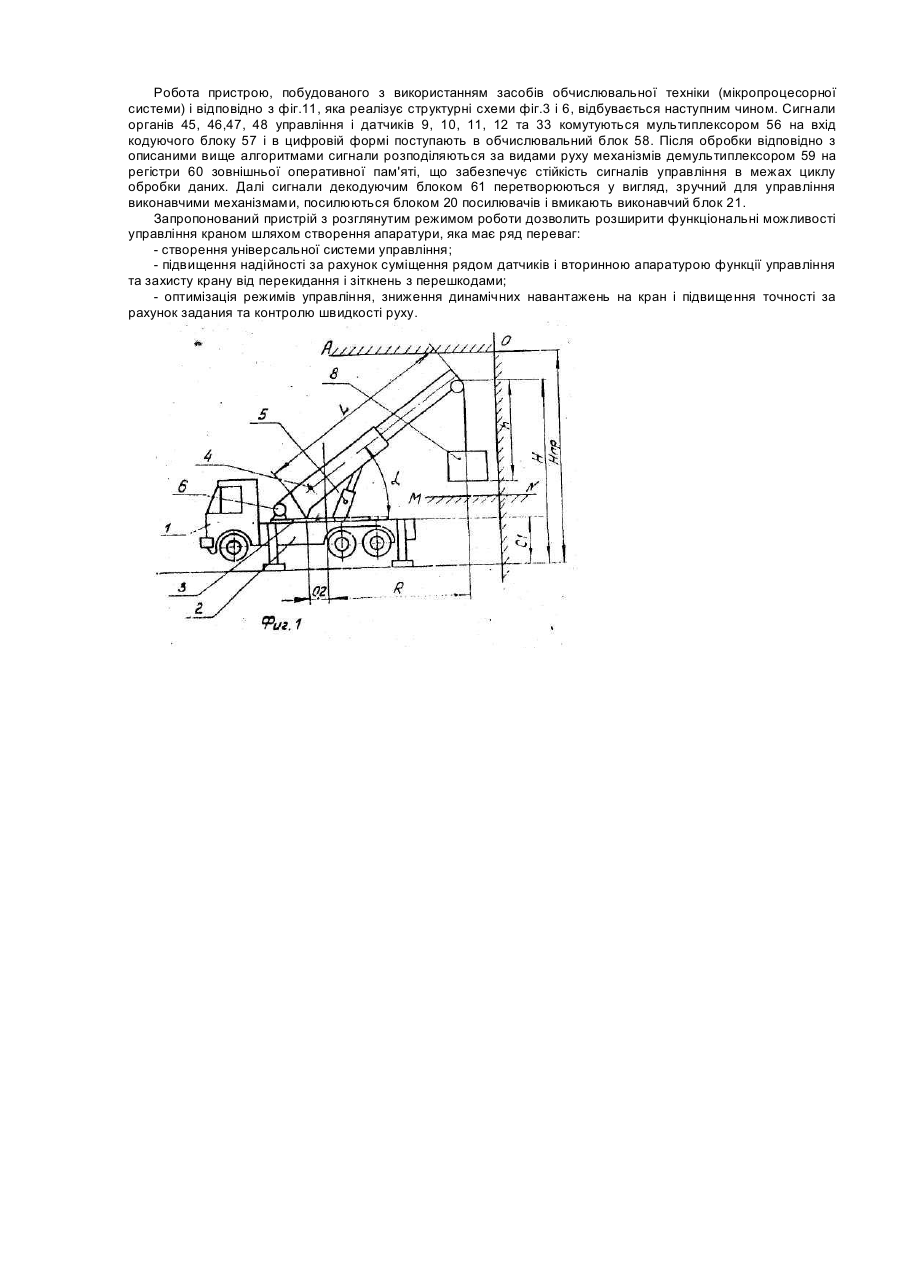
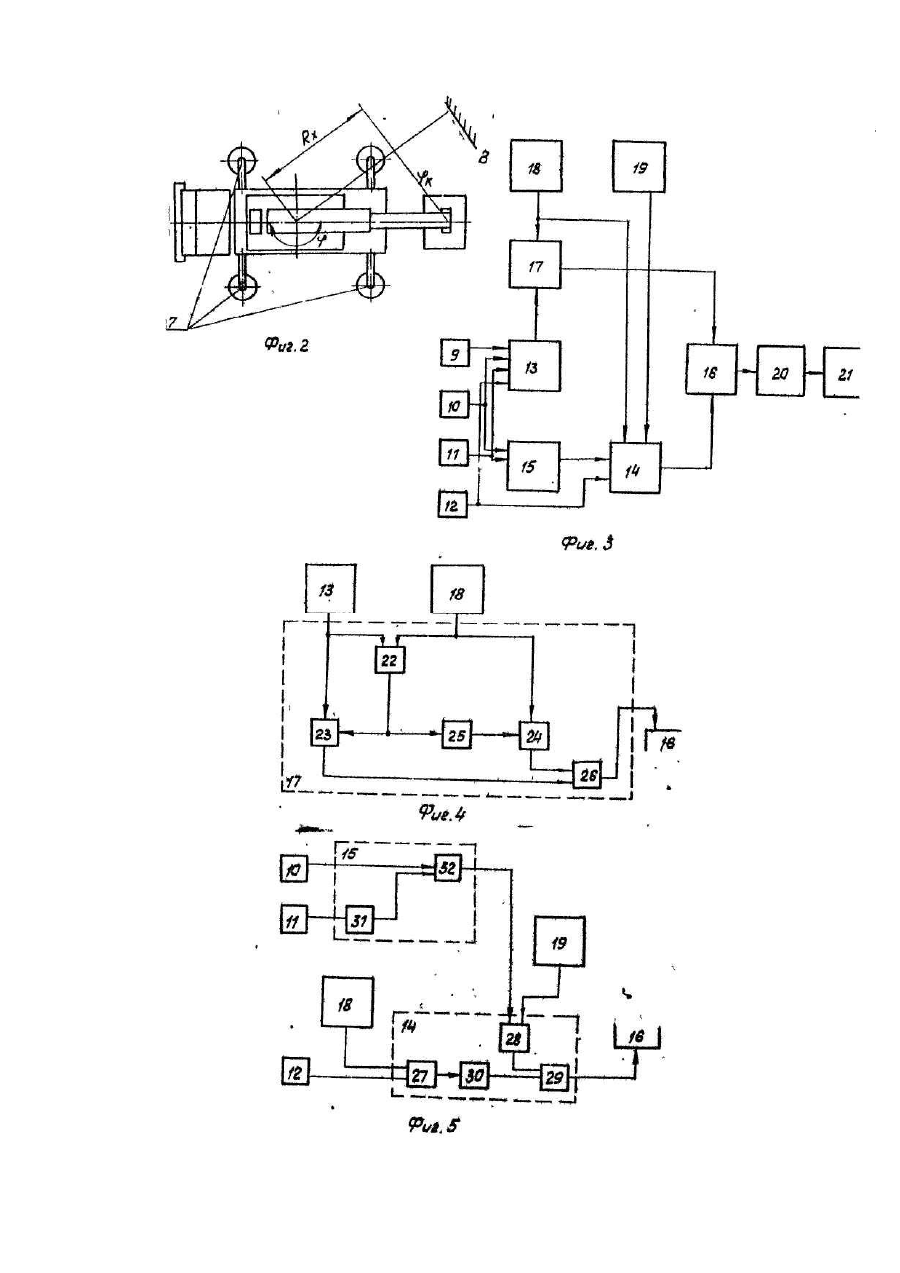
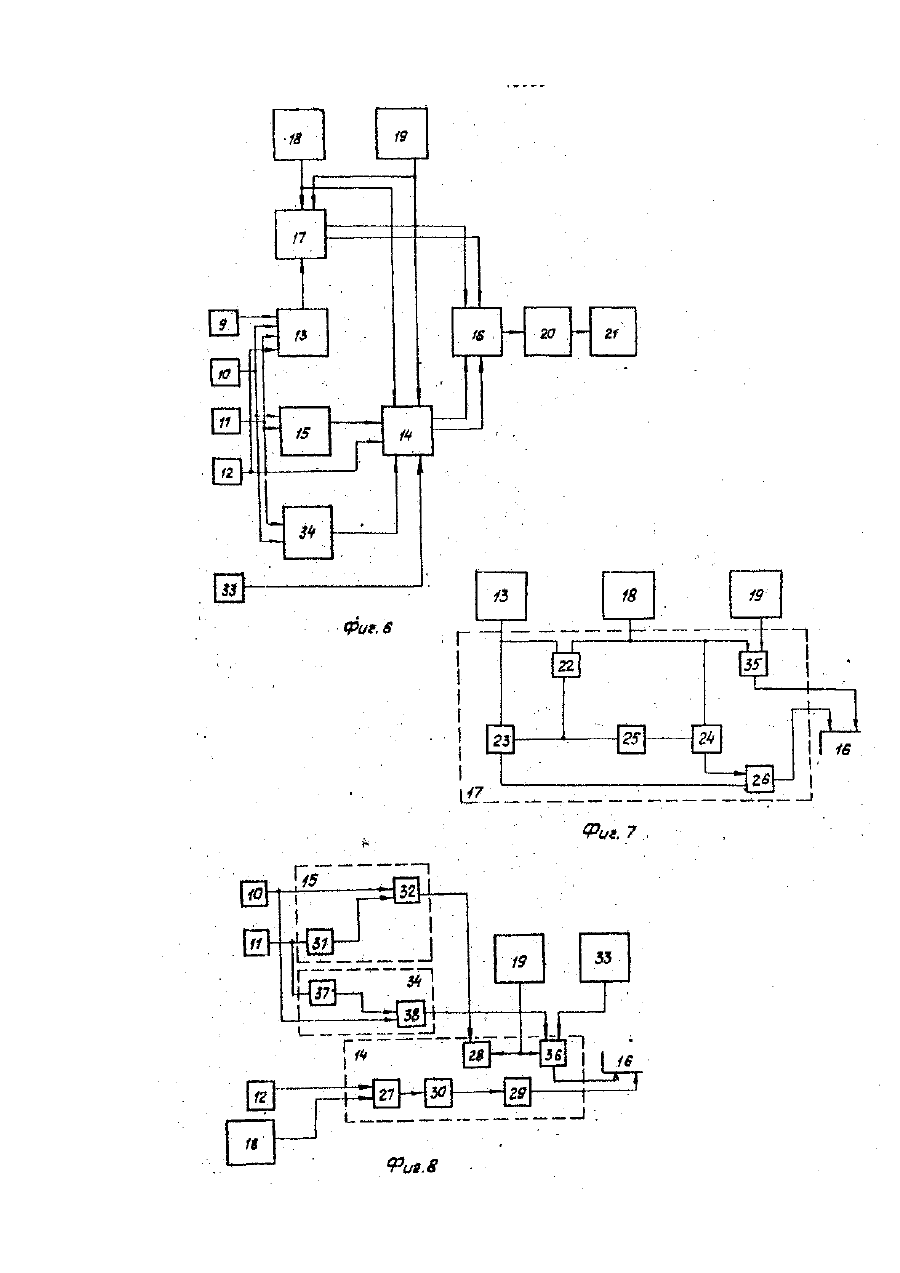
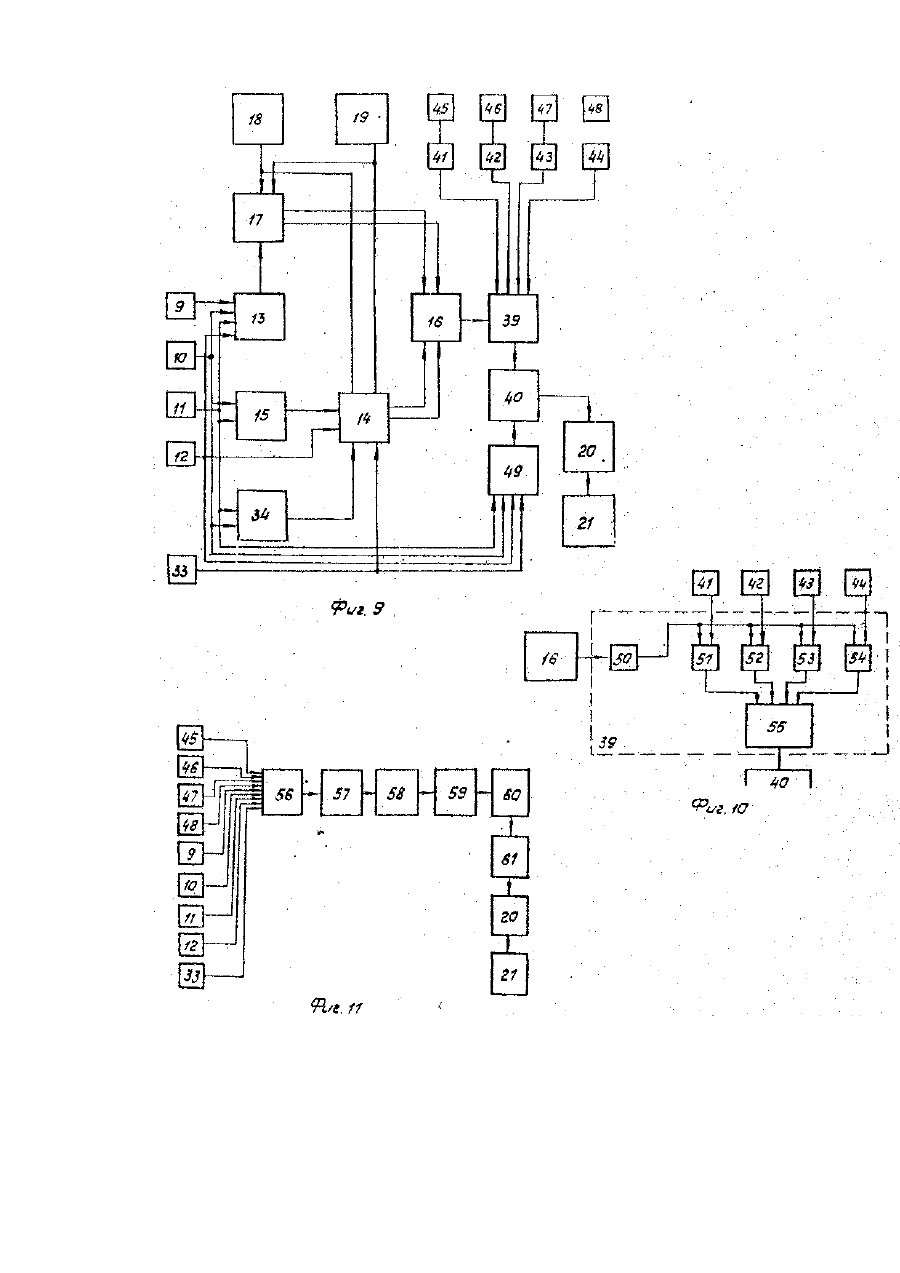
Винахід відноситься до підіймально-транспортного машинобудування, а саме до пристроїв управління вантажопідіймальними кранами, але з найбільшим ефектом може бути застосованим на кранах автомобільного типу Із змінним (за рахунок зміни довжини і кута нахилу стріли) вильотом і висотою підіймання вантажу. Є відомим пристрій для управління краном, який містить датчики навантаження, довжини, кута нахилу і повороту стріли, які під'єднані виходами до входів блоку визначення навантаження, блок порівняння, вихід якого зв'язаний з виконавчим блоком, блок задания допустимих координат вантажозахоплювального органу та блок визначення проекції стріли на горизонтальну площину, входи якого під'єднані до датчиків довжини і нахилу стріли. Недоліком відомого пристрою є те, що він не запобігає зіткненням з перешкодою при роботі крану поблизу різних конструкцій. Мета винаходу - підвищення надійності шляхом забезпечення захисту від зіткнення з перешкодою. Мета досягається тим, що пристрій для управління стріловим краном, який містить датчики навантаження, довжини, кута нахилу і повороту стріли, під'єднані виходами до входів блоку визначення, допустимого вильоту стріли за навантаженням, блок порівняння, вихід якого зв'язаний через блок посилювачів Із виконавчим блоком, блок задання допустимих координат вантажозахоплювального органу та блок визначення проекції стріли на горизонтальну площину, входи якого під'єднані до датчиків довжини та нахилу стріли, має блок задання початкових координат вантажозахоплювального органу, блок корекції допустимих координат, блок визначення фактичних координат вантажозахоплювального органу, входи якого з'єднані з виходами відповідно блоку визначення проекції стріли на горизонтальну площину, блоку задання початкових координат вантажозахоплювального органу, блоку задання допустимих координат і датчика повороту стріли, а вихід під'єднаний до одного Із входів блоку порівняння, другий вхід якого з'єднаний з виходом блоку корекції допустимих координат, один із входів якого з'єднаний з виходом блоку визначення допустимого вильоту стріли за навантаженням, а другий вхід - з виходом блоку задання допустимих координат вантажозахоплювального органу, причому блок корекції допустимих координат містить елемент вибору найменшого значення, елементи І, НІ, АБО, виходом останнього з яких утворений вихід блоку, входом одного Із елементів І та одним із входів елементу вибору найменшого значення утворений другий вхід блоку, перший вхід якого утворений одним Із входів другого елементу І та другим входом елементу вибору найменшого значення, вихід якого з'єднаний з другим входом другого елементу і та входом елементу НІ, вихід якого під'єднаний до другого входу першого елементу І, вихід якого під'єднаний до одного Із входів елементу АБО, другий вхід якого з'єднаний з виходом другого елементу І, а блок визначення фактичних координат вантажозахоплювального органу містить перемножувач, виходом якого утворений вихід блоку, функціональний перетворювач, суматори, входами одного з яких утворені перший і другий входи блоку, а вихід цього суматора з'єднаний з одним Із входів перемножувача, другий вхід якого під'єднаний до виходу функціонального перетворювача, вхід якого з'єднаний з виходом другого суматора, входами якого утворені третій і четвертий входи блоку. Мета досягається також тим, що пристрій має датчик кількості тросу на барабані вантажної лебідки, блок визначення проекції стріли на вертикальну площину, а блок корекції допустимих координат додатково має суматор, входом якого утворений третій вхід блоку, під'єднаний до виходу блоку задания початкових координат, другим входом суматора утворений згаданий другий вхід блоку, а виходом суматора другий вихід блоку, який під'єднаний до першого входу другого каналу блоку порівняння, причому блок визначення фактичних координат має додатковий суматор, одним входом якого утворений п'ятий вхід блоку, з'єднаний з датчиком кількості тросу на барабані вантажної лебідки, другим входом - шостий вхід блоку, під'єднаний до виходу блоку визначення проекції стріли на вертикальну площину, входи якого під'єднані до датчиків довжини та кута нахилу стріли, а третім входом третього суматора утворений згаданий другий вхід блоку, а виходом другий вихід блоку, під'єднаний до другого входу другого каналу блоку порівняння. Мета досягається також тим, що пристрій має ввімкнені між згаданими блоком порівняння та блоком посилювачів, з'єднані послідовно блок визначення допустимої швидкості та блок порівняння швидкостей, під’єднаний до другого входу блоку порівняння швидкостей блок визначення фактичної швидкості, до входів якого під'єднані згадані виходи датчиків довжини, кута нахилу та повороту стріли і датчик кількості тросу на барабані вантажної лебідки, і під'єднані до Інших входів блоку визначення допустимої швидкості задатчики швидкостей телескопування, кутового переміщення стріли, повороту стріли та обертання вантажної лебідки. На фіг.1 зображений кран і площини, які обмежують переміщення вантажу. На фіг.2 - те ж, вигляд зверху. На фіг.3 наведена функціональна схема пристрою з обмеженням переміщення вантажу в горизонтальній площині. На фіг.4 наведена функціональна схема блоку корекції допустимих координат для пристрою, який зображений на фіг.3. На фіг.5 наведена функціональна схема блоку визначення фактичних координат вантажозахоплювального органу і з'єднаного з ним блоку визначення проекції стріли на горизонтальну площину для пристрою, який зображений на фіг.3. На фіг.6 наведена функціональна схема пристрою з обмеженням переміщення вантажу в горизонтальній і вертикальній площинах. На фіг.7 наведена функціональна схема блоку корекції допустимих координат для пристрою, який зображений на фіг.6. На фіг.8 наведена функціональна схема блоку визначення фактичних координат вантажозахоплювального органу і з'єднаних з ним блоків визначення проекції стріли на горизонтальну і вертикальну площини для пристрою, який зображений на фіг.6. На фіг.9 наведена функціональна схема пристрою з задатчиками швидкостей руху обладнання крану. На фіг.10 наведена функціональна схема блоку визначення допустимих швидкостей для пристрою, який зображений на фіг.9. На фіг.11 наведений варіант реалізації пристрою з використанням елементів обчислювальної техніки. Кран має ходову раму 2, поворотну платформу 3, телескопічну стрілу 4, гідроциліндр підіймання стріли 5, вантажну лебідку 6, опори 7 і вантаж 8, який переміщується в будь-яку точку координатного простору, обмеженого технічними можливостями конструкції крану і можливими перешкодами, відміченими площинами: горизонтальною АО (та MN) і вертикальною ВО. Пристрій (фіг.3) містить датчик 9 навантаження, датчик 10 довжини стріли (L), датчик 11 кута нахилу стріли і датчик 12 кута повороту стріли, які з'єднані Із входами блоку 13 визначення допустимого вильоту стріли за навантаженням, блоку 14 визначення фактичних координат вантажозахоплювального органу та блоку 15 визначення проекції стріли на горизонтальну площину; блок 14 з'єднаний з одним Із входів блоку 16 порівняння, другий вхід якого з'єднаний з виходом блоку 17 корекції допустимих координат, входи якого з'єднані з виходами блоку 13, блоку 18 задания допустимих координат вантажозахоплювального органу і блоку 19 задання початкових координат вантажозахоплювального органу, а вихід блоку 16 з'єднаний через блок посилювачів 20 з виконавчим блоком 21. Блок 17 (фіг.4) корекції допустимих координат містить елемент 22 вибору найменшого значення, елементи 23,24 І, елемент 25 НІ і елемент 26 АБО. Блок 14 (фіг.5) містить суматори 27, 28, перемножувач 29 і функціональний перетворювач 30, а блок 15 містить функціональний перетворювач 31 і перемножувач 32. Пристрій з обмеженням переміщення вантажу в горизонтальній і вертикальній площинах (фіг.6) може також містити датчик 33 кількості тросу на барабані вантажної лебідки і блок 34 визначення проекції стріли на вертикальну площину, а блок 17 (фіг.7) в цьому випадку додатково містить суматор 35, своїми входами під'єднаний до виходів блоків 18 і 19, блок 14 (фіг.8) додатково містить суматор 36, своїми входами під'єднаний до виходів блоків 19,34 і датчика 33, блок 34 містить функціональний перетворювач 37 і перемножувач 38, а блок 16 порівняння є двоканальним для порівняння допустимих і фактичних координат вантажу в горизонтальній і вертикальній площинах. Пристрій (фіг.9) може також містити блок 39 обчислення допустимих швидкостей і в цьому випадку до блоку 39 може бути під'єднаний блок 40 порівняння та задатчики 41, 42, 43, 44 відповідно швидкостей телескопування, кутового переміщення стріли, повороту стріли та обертання вантажної лебідки, які під'єднані до органів 45, 46, 47, 48 управління відповідно телескопуванням, кутовим переміщенням стріли, поворотом стріли і підійманням вантажу, 8 до блоку 40 порівняння під'єднаний блок 49 обчислення фактичних швидкостей, до якого під'єднані датчики 10,11,12 та 33; при цьому блок 39 визначення допустимих швидкостей містить маштабуючий посилювач 50, суматори 51,52,53,54 та блок 55 диференціюючих ланок. При виконанні пристрою з використанням засобів обчислювальної техніки пристрій містить мультиплексор 56, кодуюючий блок 57, обчислювальний блок 58, демультиплексор 59, регістр 60 та декодуючий блок 61. Пристрій працює наступним чином. Після встановлення крана 1 на опори 7 оператор (кранівник) може розпочати операції по переміщенню вантажозахоплювального пристрою (з вантажем або без нього) в точки простору, обмежені конструктивними можливостями крана: максимальною і мінімальною довжиною L телескопічної стріли, максимальним і мінімальним кутом підіймання стріли, допустимим кутом повороту стріли (платформи) (можлива заборона переміщення вантажу над кабіною), а також обмеженнями, пов'язаними з наявністю перешкод і вантажними можливостями крану. Наявність перешкод створює обмеження по висоті Н оголовка стріли Ндоп = Нпр - С1 (1) та проекції Rx вильоту R на перпендикуляр до вертикальної площини ОВ, що обмежує перешкоду де L - довжина стріли, a - кут нахилу стріли, j - кут повороту стріли в горизонтальній площині, jк - кут між віссю крану і перпендикуляром до ОВ, Нпр - висота перешкоди, Ндоп та Рхдоп - допустимі значення Н та Rx. *С1 - константа, яка визначається висотою точки кріплення стріли на поворотній платформі крану відносно площини, на якій встановлений кран і дорівнює 1,2...2 м, С2 - константа, яка визначається. відстанню між точкою кріплення стріли на поворотній платформі крану та віссю обертання поворотної платформи 1 дорівнює 1... 2,5 м. Можливості крану, які задаються його вантажною характеристикою, визначають обмеження по вильоту RQдоп в функції вантажу Q, що переноситься краном Сукупність параметрів, що входять в (1), (2), (3), а також засобів їх контролю на крані, дозволяють створити єдину систему управління краном, причому використання обчислюваного для запобігання перекиданню значення допустимого вильоту Rдоп дозволяє забезпечити оптимізацію цього управління. Для забезпечення сумісності управління краном по критеріях захисту його від зіткнення з перешкодами або захисту від перевантаження, допустиме навантаження крану доцільно виразити по (3) через допустимий виліт. До початку роботи оператор за допомогою блоку 18 (фіг.3) задання допустимих координат вантажозахоплювального пристрою (якщо є перешкоди для переміщення вантажу) та Із врахуванням габаритів вантажу вводить обмеження на переміщення, задаючи значення Rxдоп (або Rxдоп та Ндоп для пристрою на фіг.6). Задатчики цих значень в блоці 18, проградуйовані в одиницях довжини, можуть бути аналоговими (наприклад, потенціометри), якщо у пристрої застосовані аналогові датчики 10,11,12, або цифровими, якщо застосовані цифрові датчики. Як задатчик в блоці 18 може бути застосований цифровий оперативний запам'ятовуючий пристрій, в який попередньо в якості допустимих записується значення Rx та Н під час взірцевого циклу крану; для цього обладнання крану переміщується до граничних значень, в оперативний запам'ятовуючий пристрій заносяться дані Rx та Н, які визначені в блоці 14 фактичних координат. Після введення допустимих координат оператор Ініціює початок роботи, одночасно подаючи в блок 17 корекції допустимих координат вантажозахоплювального пристрою сигнали про можливі переміщення вантажу. Одночасно шляхом зчитування показів датчиків навантаження 9 (наприклад, тиск в гідроциліндрі 5), довжини 10 та кута нахилу 11 стріли (трансформаторні, потенціометричні датчики переміщень) блок 13 визначення допустимого вильоту за навантаженням крану визначає відповідно формулі (3) допустиме значення Rдоп і в якості другого обмеження вводить в блок 17. Інші дані, характерні для даного типу крану, вводяться в блоки 14 та 17 блоком 19, в якому початкові координати задаються у вигляді опорних напруг для пристроїв з аналоговими датчиками або у вигляді кодів для пристроїв з цифровими датчиками. В результаті після обробки блоком 17 з'являється сигнал меншого Із двох допустимих значень переміщення Rxдоп та RQдоп. який і порівнюється у пристрої 16 з фактичним значенням Rх. На блок 16, який виконується двоканальним для реалізації пристрою (фіг.6)поступає також сигнал обмеження по висоті відповідно до формули (1). Варіант блоку 17 корекції допустимих координат поданий на фіг.4, відповідно з яким компаратор 22 порівнює значення Rxдоп та RQдоп, перемикаючись таким чином, щоб через елемент 23 і проходив на елемент 26 АБО сигнал при RQдоп < Rxдоп, а через елемент 24 і проходив сигнал при Rхдоп < RQдоп. У такому випадку на блок 16 буде поступати сигнал RQдоп при RQдоп < Rxдоп та сигнал Rxдоп при Rxдоп < RQдоп. Суматор 35 у варіанті блоку 17, наведеному на фіг.7, забезпечує алгебраїчне додавання, сигналів, які відповідають висоті перешкоди (Нпр при обмеженні висоти підіймання оголовка або (Нпр - h] при обмеженні опускання вантажу) та константі С1 крану. Датчики 10 та 11, а також датчик 12 повороту стріли, створюють сигнали на блок 14 визначення фактичних координат, на виході якого з'являються сигнали про фактичне розташування оголовка стріли відносно перешкоди, виражені через Rx та Н. Блок 14 у варіанті на фіг.5 працює наступним чином. Сигнал датчика 11 кута нахилу стріли (a) поступає на функціональний перетворювач 31 (cos a) блоку 15, після чого на один вхід перемножувача 32. На другий вхід перемножувача 32 поступає сигнал датчика 10 довжини стріли (L), а з його виходу сигнал добутку (L x cos a) поступає на один вхід суматора 28 блоку 14. На другий вхід суматора 28 поступає з блоку 19 величина С2. В результаті алгебраїчного додавання на виході суматора 28 з'являється сигнал різниці (L cos a - C2), який поступає на один вхід перемножувача 29. При цьому сигнал датчика 12 повороту стріли (j) додається в суматорі 27 з сигналом від блоку 18 кута (jк) між віссю крана і перпендикуляром до площин перешкоди, що характеризує розташування крана відносно перешкоди, і у вигляді суми (j+jк) поступає на вхід функціонального перетворювача 30 (cos (j+jк )), після якого на другий вхід перемножувача 29, На виході перемножувача 29 з'являється сигнал Rx = (Lcos a - C2) x cos(j+ jk). Елементи блоку 14 можуть бути виконані на стандартних схемах як аналогової, так і цифрової елементної бази. Робота блоку 14 у варіанті, наведеному на фіг.8, відбувається наступним чином. Сигнал датчика 11 кута нахилу стріли (a) поступає на функціональний перетворювач 37 (sin a) блоку 34, після чого на один вхід перемножувача 38. На другий вхід перемножувача 38 поступає сигнал датчика 10 довжини стріли (L), а з його виходу сигнал добутку (L х sin a) поступає на один вхід суматора 36. На другий вхід суматора 36 поступає з блоку 19 величина С1, а на третій вхід суматора 36 поступає сигнал датчика 33 кількості тросу на барабані лебідки. В результаті алгебраїчного додавання з'являється сигнал, що характеризує висоту підіймання вантажу, або при відсутності сигналу (нульовому сигналі) датчика 33 кількості тросу на барабані вантажної лебідки - висоту оголовка стріли. Робота пристрою (фіг.9), який забезпечує вибір швидкісних режимів руху, відбувається наступним чином. У блок 17, який визначає допустимі координати вантажозахоплювального пристрою, поступають сигнали від блоку 13 про допустимий виліт за навантаженням. Сигнали блоку 17 і блоку 14 фактичних координат алгебраїчно додаються в блоці 16, в результаті чого визначається ступінь віддаленості вантажозахоплювального пристрою від граничних координат. Сигнали блоку 16 поступають на входи блоку 39 визначення допустимої швидкості, на Інші входи якого поступають сигнали від задатчиків 41, 42, 43 і 44 швидкостей механізмів крану. Швидкості задає оператор за допомогою органів управління 45, 46, 47, 48. Відповідно зі схемою 10 блок 39 працює наступним чином.. Сигнали блоку 16 поступають на масштабуючий посилювач 50 для забезпечення можливості сумісної обробки їх із сигналами задатчиків швидкостей 41, 42, 43, 44 (по суті датчиків переміщення рукояток, сигнали яких виражені в одиницях відстані), після чого вони додаються суматорами 51, 52, 53, 54 і диференціюються ланкою 55 по часу з метою надання сигналам масштабу швидкості для можливості порівняння в порівнюючому пристрої 40 з сигналами блоку 49 визначення фактичних швидкостей телескопування, підіймання стріли, підіймання вантажу і повороту стріли. Одночасно по сигналах датчиків 10, 11, 12 і 33 блоком 49 обчислення фактичних швидкостей шляхом диференціювання сигналів датчиків визначаються фактичні швидкості механізмів крану. Результати порівняння блоком 40 сигналів блоків 39 149 передаються на блок 20 посилювачів і виконавчий блок 21 (в даному випадку пропорційної дії). Робота пристрою, побудованого з використанням засобів обчислювальної техніки (мікропроцесорної системи) і відповідно з фіг.11, яка реалізує структурні схеми фіг.3 і 6, відбувається наступним чином. Сигнали органів 45, 46,47, 48 управління і датчиків 9, 10, 11, 12 та 33 комутуються мультиплексором 56 на вхід кодуючого блоку 57 і в цифровій формі поступають в обчислювальний блок 58. Після обробки відповідно з описаними вище алгоритмами сигнали розподіляються за видами руху механізмів демультиплексором 59 на регістри 60 зовнішньої оперативної пам'яті, що забезпечує стійкість сигналів управління в межах циклу обробки даних. Далі сигнали декодуючим блоком 61перетворюються у вигляд, зручний для управління виконавчими механізмами, посилюються блоком 20 посилювачів і вмикають виконавчий блок 21. Запропонований пристрій з розглянутим режимом роботи дозволить розширити функціональні можливості управління краном шляхом створення апаратури, яка має ряд переваг: - створення універсальної системи управління; - підвищення надійності за рахунок суміщення рядом датчиків і вторинною апаратурою функції управління та захисту крану від перекидання і зіткнень з перешкодами; - оптимізація режимів управління, зниження динамічних навантажень на кран і підвищення точності за рахунок задания та контролю швидкості руху.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of jib crane
Автори англійськоюMash Dmytro Matviiovych, Kushnir Yurii Yevhenovych, Kosheliuk Roman Yevhenovych
Назва патенту російськоюУстройство для управления стреловым краном
Автори російськоюМаш Дмитрий Матвеевич, Кушнир Юрий Евгеньевич, Кошелюк Роман Евгеньевич
МПК / Мітки
МПК: B66C 23/90
Мітки: пристрій, стріловим, управління, краном
Код посилання
<a href="https://ua.patents.su/7-10656-pristrijj-dlya-upravlinnya-strilovim-kranom.html" target="_blank" rel="follow" title="База патентів України">Пристрій для управління стріловим краном</a>
Спосіб управління стріловим виконавчим органом гірничо-прохідницького комбайну
Номер патенту: 7628
Опубліковано: 26.12.1995
Автори: Шумалінський Семен Овсійович, Злодєєв Олександр Васильович, Сіненко Віктор Васильович
МПК: E21C 35/24
Мітки: виконавчим, спосіб, гірничо-прохідницького, управління, комбайну, стріловим, органом
Формула / Реферат:
Способ управлення стреловым исполнительным органом горнопроходческого комбайна, заключающийся в выполнении образцового цикла обработки забоя, записи величины, направления и последовательности перемещений исполнительного органа и управлении перемещениями исполнительного органа при последующих циклах обработки забоя в соответствии с программой перемещений, записанной в течение образцового цикла, отличающийся тем, что, с целью повышения...
Пристрій управління запобіжним гальмом підіймальної машини
Номер патенту: 5617
Опубліковано: 28.12.1994
Автори: Григор'єв Валерій Васильович, Бєліков Микола Лаврентійович
МПК: B66B 5/16, F15B 11/00
Мітки: запобіжним, підіймальної, машини, управління, гальмом, пристрій
Текст:
...з'єднана з виходів двохпозиційного трьохлінійного розподільника блоку відпрацювання параметрів першого і другого ступенів галь- 35 мування, згідно з винаходом має функціональний блок швидкості І редукційний клапан, який з'єднаний своїм входом до джерела тиску, а виходом - до входу розподільника блоку відпрацювання 40 параметрів першого І другого ступенів гальмування, сполученного другим своїм виходом о атмосферою І виконаним з...
Пристрій для управління електромагнітною муфтою
Номер патенту: 7610
Опубліковано: 29.09.1995
Автори: Дубінін Сергій Васильович, Кухтін Микола Васильович, Мальцев Леонід Єгорович
МПК: H01F 13/00
Мітки: управління, муфтою, пристрій, електромагнітною
Формула / Реферат:
Устройство для управления электромагнитной муфтой, содержащее трансформатор, вторичная обмотка которого выполнена со средней точкой, два тиристора, фазосдвигающий блок, блок защиты, диод, стабилитрон, транзистор, резистор, релейный элемент с размыкающим контактом, блок задержки, катод первого тиристора соединен с катодом диода и снабжен зажимом для подключения одного вывода обмотки электромагнитной муфты, анод первого тиристора соединен...
Пристрій управління протикриговою системою газотурбінного двигуна
Номер патенту: 1334
Опубліковано: 25.03.1994
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/00
Мітки: протикриговою, двигуна, системою, пристрій, управління, газотурбінного
Формула / Реферат:
Устройство управления противообледенительной системой газотурбинного двигателя по авт.св. № 1471682, отличающееся тем, что, с целью повышения надежности, датчик оборотов выполнен с дополнительным выходом, а устройство дополнительно содержит источник постоянного напряжения, резистор, согласующий блок, источник опорного напряжения, блок сравнения и блок анализа, выход источника постоянного напряжения подключен через резистор к первому входу...
Пристрій контролю місцезнаходження струга та управління приводом стругової установки
Номер патенту: 7687
Опубліковано: 26.12.1995
Автори: Голубчиков Олександр Митрофанович, Муфель Лев Абрамович, Биковський Олександр Павлович, Шапошнік Василь Іванович, Кібрик Ісаак Соломонович
МПК: E21C 27/18
Мітки: пристрій, контролю, управління, установки, стругової, приводом, струга, місцезнаходження
Формула / Реферат:
Устройство контроля местонахождения струга и управления приводом струговой установки, содержащее датчик перемещения струга, соединенный через входной блок с реверсивным счетчиком, ко входам которого подключены, индикатор местонахождения струга и узел задания пределов реверсирования, блок оперативного управления, схему совпадения, блок управления приводом, подключенный к магнитному пускателю электропривода струга, отличающееся тем, что, .с...
Попередній патент: Посіб сейсморозвідки
Наступний патент: Гідроелектростанція
Випадковий патент: Пристрій для передачі штучних вантажів з одного конвеєра на другий