Спосіб фазового вимірювання радіальної швидкості та пристрій для його здійснення
Номер патенту: 109145
Опубліковано: 27.07.2015
Автори: Харченко Володимир Петрович, Сорочан Анатолій Григорович


Формула / Реферат
1. Спосіб фазового вимірювання радіальної швидкості, згідно з яким немодульоване високочастотне коливання ![]() з частотою
з частотою ![]() ділиться на дві частини
ділиться на дві частини ![]() і
і ![]() , перша частина коливань
, перша частина коливань ![]() також ділиться на дві частини
також ділиться на дві частини ![]() і
і ![]() , коливання
, коливання ![]() за допомогою високостабільного коливання
за допомогою високостабільного коливання ![]() з частотою
з частотою ![]() перетворюється вниз по частоті, отримуємо напругу
перетворюється вниз по частоті, отримуємо напругу ![]() з частотою
з частотою ![]() , друга частина
, друга частина ![]() коливання
коливання ![]() після перетворення і посилення випромінюється в простір, коливання
після перетворення і посилення випромінюється в простір, коливання ![]() , відбившись від рухомої цілі, набуває доплерівський зсув по частоті, відбите коливання приймається, перетворюється, підсилюється, в результаті отримуємо сигнал
, відбившись від рухомої цілі, набуває доплерівський зсув по частоті, відбите коливання приймається, перетворюється, підсилюється, в результаті отримуємо сигнал ![]() з частотою
з частотою ![]() , який відрізняється тим, що коливання
, який відрізняється тим, що коливання ![]() з частотою
з частотою ![]() затримується на постійну часу
затримується на постійну часу ![]() , після чого перемножується з напругою
, після чого перемножується з напругою ![]() з частотою
з частотою ![]() , з результату перемноження виділяється складова
, з результату перемноження виділяється складова ![]() з різницевою частотою, яка дорівнює
з різницевою частотою, яка дорівнює![]() , сигнал
, сигнал ![]() з частотою
з частотою ![]() ділиться на дві рівні частини
ділиться на дві рівні частини ![]() ,
, ![]() , сигнал
, сигнал ![]() за допомогою високостабільного коливання
за допомогою високостабільного коливання ![]() з частотою
з частотою ![]() перетворюється вниз по частоті, отримуємо сигнал
перетворюється вниз по частоті, отримуємо сигнал ![]() з частотою
з частотою ![]() , друга частина
, друга частина ![]() сигналу
сигналу ![]() з частотою
з частотою ![]() затримується на постійну часу
затримується на постійну часу ![]() , після чого перемножується з напругою
, після чого перемножується з напругою ![]() з частотою
з частотою ![]() , з результату перемноження виділяється складова
, з результату перемноження виділяється складова ![]() з різницевою частотою, яка дорівнює
з різницевою частотою, яка дорівнює ![]() , отримані коливання
, отримані коливання ![]() і сигнал
і сигнал ![]() порівнюються по фазі, з результату порівняння визначається фазовий зсув
порівнюються по фазі, з результату порівняння визначається фазовий зсув ![]() , який пропорційний радіальній швидкості руху цілі
, який пропорційний радіальній швидкості руху цілі ![]() .
.
2. Пристрій фазового вимірювання радіальної швидкості, який містить передавач, до складу якого входять генератор високої частоти, лінійний тракт, вихід якого є першим виходом передавача, другим виходом передавача є вихід генератора високої частоти, який також з'єднаний з входом лінійного тракту передавача, приймач, до складу якого входять лінійний тракт, перший змішувач, кварцовий генератор, друга лінія затримки, перший і другий смугові фільтри, перший і другий перемножувачі, вхід лінійного тракту є входом приймача, другий вихід передавача з'єднаний з першим входом першого змішувача, другий вхід якого з'єднаний з кварцовим генератором, вихід змішувача з'єднаний через перший смуговий фільтр з першим входом першого перемножувача, вихід другого смугового фільтра з'єднаний з першим входом другого перемножувача, другий вхід якого з'єднаний з другою лінією затримки, який відрізняється тим, що в нього введені перша лінія затримки, через яку перший вхід першого змішувача з'єднаний з другим входом першого перемножувача, другий змішувач, перший вхід якого з'єднаний з виходом лінійного тракту, другий вхід другого змішувача з'єднаний з кварцовим генератором, а вихід другого змішувача з'єднаний з другим смуговим фільтром, вхід другого змішувача через другу лінію затримки з'єднаний з другим входом другого перемножувача, вимірювач фази, перший і другий входи якого з'єднані відповідно з виходами першого і другого перемножувачів, вихід вимірювача фази є виходом пристрою.
Текст
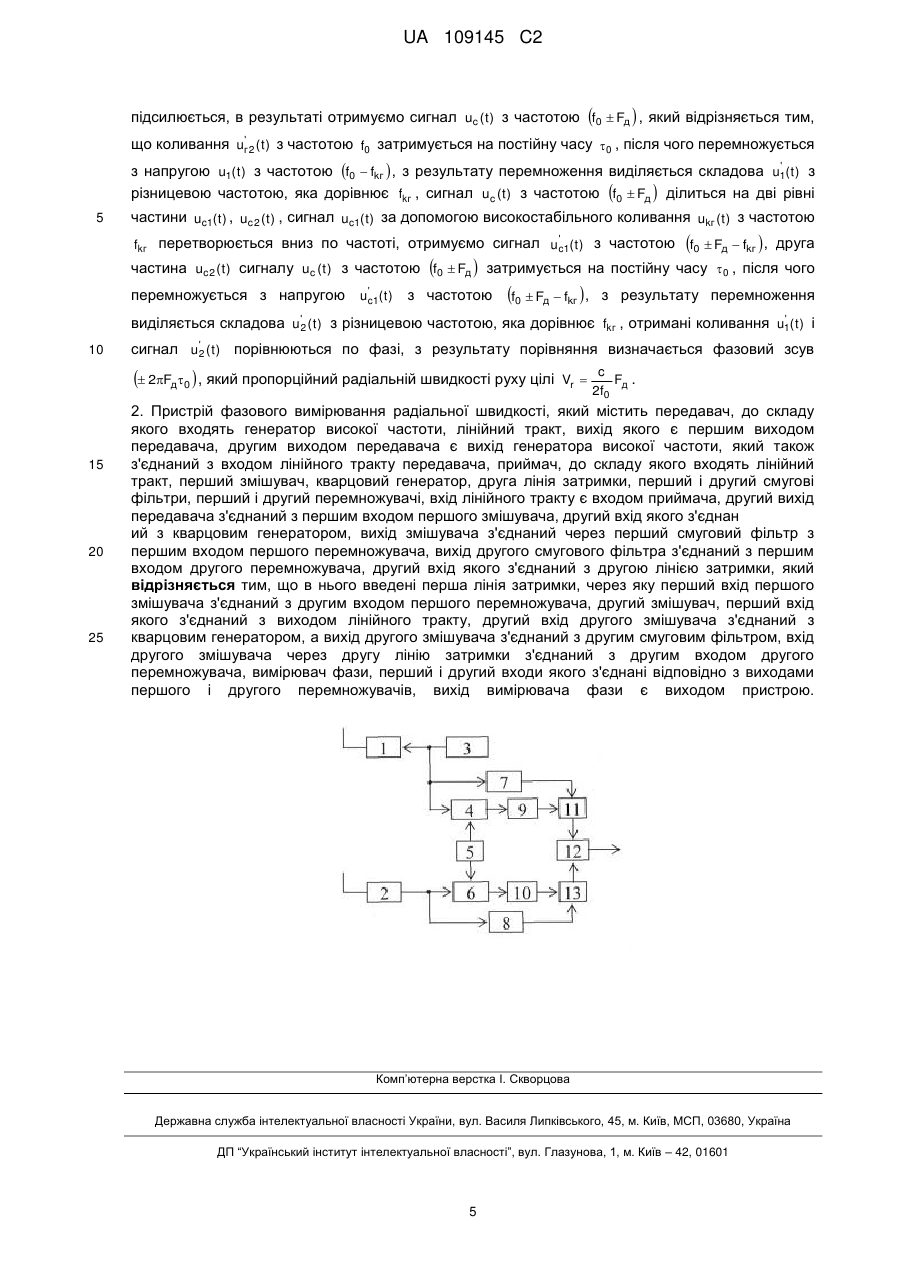
Реферат: Група винаходів належить до радіотехніки. Спосіб фазового вимірювання радіальної швидкості, згідно з яким немодульоване високочастотне коливання uг ( t ) з частотою f0 ділиться на дві ' ' ' ' ' частини uг ( t ) і uг' ( t ) , перша частина коливань uг ( t ) також ділиться на дві частини uг1( t ) і uг 2 ( t ) , коливання ' uг1( t ) за допомогою високостабільного коливання ukг ( t ) з частотою fkг перетворюється вниз по частоті, отримуємо напругу u1( t ) з частотою f0 fkг , друга частина ' uг' ( t ) коливання uг ( t ) після перетворення і посилення випромінюється в простір, коливання ' uг' ( t ) , відбившись від рухомої цілі, набуває доплерівський зсув по частоті, відбите коливання приймається, перетворюється, підсилюється, в результаті отримуємо сигнал uc ( t ) з частотою f0 Fд . ' Коливання uг 2 ( t ) з частотою f0 затримується на постійну часу 0 , після чого перемножується з напругою u1( t ) з частотою f0 fkг , з результату перемноження виділяється ' складова u1( t ) з різницевою частотою, яка дорівнює fkг , сигнал uc ( t ) з частотою f0 Fд ділиться на дві рівні частини uc1( t ) , uc 2 ( t ) , сигнал uc1( t ) за допомогою високостабільного коливання ukг ( t ) з частотою fkг перетворюється вниз по частоті, отримуємо сигнал u'c1( t ) з частотою f0 Fд fkг , друга частина uc 2 ( t ) сигналу uc ( t ) з частотою f0 Fд затримується на постійну часу 0 , після чого перемножується з напругою u'c1( t ) з частотою результату перемноження виділяється складова u'2 ( t ) f0 Fд fkг , з з різницевою частотою, яка дорівнює fkг , ' отримані коливання u1( t ) і сигнал u'2 ( t ) порівнюються по фазі, з результату порівняння визначається фазовий зсув 2Fд0 , який пропорційний радіальній швидкості руху цілі UA 109145 C2 (12) UA 109145 C2 Vr c Fд . Пристрій фазового вимірювання радіальної швидкості містить передавач, до складу 2f 0 якого входять генератор високої частоти, лінійний тракт, вихід якого є першим виходом передавача, другим виходом передавача є вихід генератора високої частоти, який також з'єднаний з входом лінійного тракту передавача, приймач, до складу якого входять лінійний тракт, перший змішувач, кварцовий генератор, друга лінія затримки, перший і другий смугові фільтри, перший і другий перемножувачі, вхід лінійного тракту є входом приймача, другий вихід передавача з'єднаний з першим входом першого змішувача, другий вхід якого з'єднаний з кварцовим генератором, вихід змішувача з'єднаний через перший смуговий фільтр з першим входом першого перемножувача, вихід другого смугового фільтра з'єднаний з першим входом другого перемножувача, другий вхід якого з'єднаний з другою лінією затримки. Введені перша лінія затримки, через яку перший вхід першого змішувача з'єднаний з другим входом першого перемножувача, другий змішувач, перший вхід якого з'єднаний з виходом лінійного тракту, другий вхід другого змішувача з'єднаний з кварцовим генератором, а вихід другого змішувача з'єднаний з другим смуговим фільтром, вхід другого змішувача через другу лінію затримки з'єднаний з другим входом другого перемножувача, вимірювач фази, перший і другий входи якого з'єднані відповідно з виходами першого і другого перемножувачів, вихід вимірювача фази є виходом пристрою. Група винаходів забезпечує підвищення точності вимірювань та можливість роботи в імпульсному режимі. UA 109145 C2 Взаємозв'язана група винаходів належить до галузі радіотехніки і може бути застосована у радіолокації або радіоаеронавігації для керування рухом для вимірювання радіальної швидкості об'єкта. Відомий доплерівський спосіб вимірювання швидкості цілі [1, 2], в якому високочастотне 5 коливання uг (t ) U0 cos2f0 t г з частотою f0 випромінюється в напрямок на ціль. Частота сигналу, відбитого від рухомої цілі, uc (t ) Uc cos 2f0 Fд t г , відрізняється від f0 на доплерівський зсув Fд . Прийнятий сигнал uc ( t ) перемножується з високочастотним коливанням uг ( t ) . 10 15 З результату перемноження виділяється різницева комбінаційна складова з доплерівською частотою Fд , яка пропорційна радіальній швидкості Vr руху цілі і за допомогою c Vr Fд 2f 0 якої визначається радіальна швидкість як . Недоліком способу є низька точність вимірювання доплерівського зсуву частоти, неможливість роботи в імпульсному режимі. Також відомий, вибраний як прототип, спосіб J-кореляційного вимірювання далекості [3], який містить сигнал, модульований по частоті гармонійним коливанням з частотою , розгалуження цього сигналу на дві частини, одна з яких випромінюється в простір, друга затримується на регульовану калібровану часову затримку і зміщується по частоті на частоту гетеродина w г , після цього перемножується з відбитим сигналом, який одержав часову затримку в просторі, з результату перемноження на частоті w г виділяється сигнал взаємно кореляційної згортки, який розгалужується на дві рівні частини, одна з яких затримується на 20 сталу часу 1 , після чого перемножується з другою частиною сигналу, з результату перемножування виділяється гармонійний сигнал з частотою , рівень цього сигналу визначається різницевою часовою затримкою , при встановленні значення регульованої затримки 0 рівень вихідного сигналу перетворюється в нуль, за значенням каліброваної 25 30 35 40 45 50 затримки 0 знаходять далекість D розташування цілі. Недоліком способу J-кореляційного вимірювання далекості є низька точність з якою можливо вимірювання радіальної швидкості, як приріст дальності за короткий інтервал часу, неможливість роботи в імпульсному режимі. Відомий пристрій доплерівського способу вимірювання швидкості цілі [1, 2], що містить дві антени передавальну Ан.1 й приймальну Ан.2, генератор високої частоти, вхід якого з'єднаний з передавальною антеною Ан.1, а вихід з першим входом змішувач. Другий вхід змішувача з'єднаний з приймальною антеною. Вихід змішувача з'єднаний з гребінчастим фільтром, а його вихід з вимірювачем частоти. Вихід вимірювача є виходом пристрою. В цьому пристрої точність вимірювання допплерівського зсуву частоти визначається смугою пропускання відповідного фільтра. Відомий пристрій J-кореляційного вимірювання далекості [3] містить передавач, який складається з гетеродина низької частоти, частотний модулятор і лінійний тракт передавача, передавальну антену, генератор низької частоти з'єднаний з передавальною антеною через послідовно ввімкнені частотний модулятор і лінійний тракт передавача, приймач, який складається з приймальної антени, лінійного тракту приймача, регульованої каліброваної лінії затримки, змішувача, кварцового генератора, першого перемножувача, смугового фільтра, лінії затримки, другого перемножувача, вузькосмугового смугового фільтра і блока цифрової обробки. Приймальна антена з'єднана із блоком цифрової обробки, через послідовно ввімкненні лінійний тракт, перший вхід першого перемножувала, смуговий фільтр, другий перемножувач і вузькосмуговий смуговий фільтр. Вихід частотного модулятора з'єднаний з другим входом першого перемножувача через регульовану калібровану лінію затримки і перший вхід змішувача, другий вхід якого з'єднаний з кварцовим генератором. Перший вхід другого перемножувача з'єднаний з своїм другим входом через лінію затримки. Вихід блока цифрової обробки є виходом пристрою. В цьому пристрої точність вимірювань радіальної швидкості знижена, так як визначається, як приріст дальності за деякий короткий інтервал часу, що є наслідком кількості необхідних вимірювань (початкова дальність, кінцева дальність, часовий інтервал на якому проводиться вимірювання). 1 UA 109145 C2 5 10 В основу першого із групи винаходів поставлено задачу створення нового способу фазового вимірювання радіальної швидкості, в якому підвищується точність вимірювання радіальної швидкості, забезпечується можливість роботи в імпульсному режимі та селекцію рухомих цілей шляхом введення нових дій над сигналом, за допомогою яких значення частоти зондуючого і відбитого сигналів перетворюється в фазу. Різниця фаз цих сигналів визначає радіальну швидкість цілі, а наявність сигналу на рухомість цілі. В основу другого із груп винаходів поставлено задачу створення нового пристрою фазового вимірювання радіальної швидкості, в якому за рахунок введення нових функціональних вузлів, зв'язків між ними забезпечується підвищення точності вимірювань та можливість роботи в імпульсному режимі. Перша поставлена задача вирішується тим, що в способі фазового вимірювання радіальної швидкості, згідно з яким немодульоване високочастотне коливання uг ( t ) з частотою f0 ділиться ' '' ' ' на дві частини uг ( t ) і uг ( t ) , перша частина коливань uг ( t ) також ділиться на дві частини uг1( t ) і 15 ' ' uг 2 ( t ) , коливання uг1( t ) за допомогою високостабільного коливання ukг ( t ) з частотою fkг перетворюється вниз по частоті, отримуємо напругу u1( t ) з частотою f0 fkг , друга частина ' uг' ( t ) коливання uг ( t ) після перетворення і посилення випромінюється в простір, коливання ' uг' ( t ) , відбившись від рухомої цілі, набуває доплерівський зсув по частоті, відбите коливання приймається, перетворюється, підсилюється в результаті отримуємо сигнал uc ( t ) з частотою f0 Fд . Згідно з винаходом коливання 20 ' uг 2 ( t ) з частотою f0 затримується на постійну часу 0 , після чого перемножується з напругою u1( t ) з частотою f0 fkг , з результату перемноження ' виділяється складова u1( t ) з різницевою частотою, яка дорівнює fkг , сигнал uc ( t ) з частотою f0 Fд ділиться на дві рівні частини uc1(t ) , uc 2 ( t ) , сигнал uc1(t ) за допомогою високостабільного ' коливання ukг ( t ) з частотою fkг перетворюється вниз по частоті, отримуємо сигнал uc1( t ) з частотою f0 Fд fkг , друга частина uc 2 ( t ) сигналу uc ( t ) з частотою f0 Fд затримується на 25 ' постійну часу 0 , після чого перемножується з напругою uc1( t ) з частотою результату перемноження виділяється складова u'2 ( t ) f0 Fд fkг , з з різницевою частотою, яка дорівнює fkг , ' ' отримані коливання u1( t ) і сигнал u2 ( t ) порівнюються по фазі, з результату порівняння визначається фазовий зсув Vr 30 35 40 45 2Fд0 , який пропорційний радіальній швидкості руху цілі c Fд 2f 0 . Проводиться перетворення частоти як зондуючого коливання, так і частоти відбитого сигналу від цілі в фазу з несучим високостабільним коливанням. В цьому разі фаза відбитого сигналу буде відрізнятися від фази опорного (зондуючого коливання) на величину, пропорційну доплерівському зсуву частоти. Друга поставлена задача вирішується тим, що у пристрій фазового вимірювання радіальної швидкості, який містить передавач до складу якого входять генератор високої частоти, лінійний тракт, вихід якого є першим виходом передавача, другим виходом передавача є вихід генератора високої частоти, який також з'єднаний з входом лінійного тракту передавача, приймач до складу якого входять лінійний тракт, перший змішувач, кварцовий генератор, друга лінія затримки, перший і другий смугові фільтри, перший і другий перемножувачі, вхід лінійного тракту є входом приймача, другий вихід передавача з'єднаний з першим входом першого змішувача, другий вхід якого з'єднаний з кварцовим генератором, вихід змішувача з'єднаний через перший смуговий фільтр з першим входом першого перемножувача, вихід другого смугового фільтра з'єднаний з першим входом другого перемножувача, другий вхід якого з'єднаний з другою лінією затримки. Згідно з винаходом в нього введені перша лінія затримки, через яку перший вхід першого змішувача з'єднаний з другим входом першого перемножувача, другий змішувач, перший вхід якого з'єднаний з виходом лінійного тракту, другий вхід другого змішувача з'єднаний з кварцовим генератором, а вихід другого змішувача з'єднаний з другим смуговим фільтром, вхід другого змішувача через другу лінію затримки з'єднаний з другим входом другого перемножувача, вимірювач фази, перший і другий входи якого з'єднані 2 UA 109145 C2 5 відповідно з виходами першого і другого перемножувачів, вихід вимірювача фази є виходом пристрою, згідно з винаходом, додатково введені другий змішувач, другий смуговий фільтр, друга лінія затримки, третій перемножувач, фазообертач і фільтр низьких частот. Крім цього, пристрій відрізняється наявністю нових зв'язків між ними. Суть винаходу пояснюється кресленням, де приведена структурна схема запропонованого пристрою. Для того, щоб підвищити точність вимірювань доплерівського зсуву частоти, забезпечити можливість роботи вимірювача в імпульсному режимі та роботи як селектора рухомої цілі в ' спосіб введені нові послідовності дій: з зондуючим коливанням uг ( t ) з частотою f0 і відбитим від 10 цілі сигналом uc ( t ) з частотою 2f0 Fд проводиться автокореляційна згортка на частоті допоміжного кварцового коливання fkг . З зондуючого коливання отримують опорне гармонійне коливання ' ' u1(t ) U1 cos2fkг t 2f00 kг . З відбитого від цілі сигналу отримують сигнал u'2 (t ) U'с cos 2fkг t 2f0 0 2Fд0 kг . Порівняння фази сигналу u'2 ( t ) з опорним коливанням ' u1( t ) дозволяє визначити значення доплерівського зсуву частоти Vr 15 20 25 30 Fд , значення якого c Fд 2f 0 . пропорційне радіальній швидкості цілі, тобто На кресленні приведена структурна схема запропонованого пристрою, де 1, 2 - лінійні тракти; 3 - генератор високої частоти; 4 і 6 - перший і другий змішувачі; 5 - кварцовий генератор; 7, 8 - перша, друга лінії затримки; 9, 10 - перший та другий смугові фільтри; 11, 13 - перший, другий перемножувачі; 12 - визначник фази. Пристрій відрізняється наявністю нових функціональних вузлів та зв'язків між ними, тобто додатково введені змішувач 6, лінія затримки 7, вимірювач фази 12, причому перший вхід першого змішувача 4 з'єднаний з виходом генератора високої частоти 3 передавача, перший вхід другого змішувача 6 з'єднаний з виходом лінійного тракту 2 приймача, другий вхід другого змішувача 6 з'єднаний з виходом кварцового генератора 5, вихід другого змішувача 6 з'єднаний з другим смуговим фільтром 10, вхід другої лінії затримки 8 з'єднаний з першим входом другого змішувача 6, виходи першого 11 і другого 13 перемножувачів з'єднані з відповідними входами вимірювача фази 12, вихід якого є виходом пристрою. Пристрій працює таким чином: Коливання високочастотного генератора 3 передавача uг (t ) Uг0 cos2f0 t 0 , де Uг 0 , f0 і 0 - відповідно, амплітуда коливань, його частота і начальна фаза; ' '' ділиться на дві частини uг ( t ) і uг ( t ) ' ' uг (t ) Uг0 cos2f0 t 0 , ' ' uг' (t ) Uг'0 cos2f0 t 0 . 35 40 ' '' Перша частина uг ( t ) надходить у приймач. Друга частина коливань uг ( t ) високочастотного генератора 3 надходить в лінійний тракт 1 передавача, де перетворюється, підсилюється і випромінюється в простір. Відбитий від рухомої цілі сигнал надходить на вхід лінійного тракту 2 приймача, де в результаті посилення, перетворення, аналогічного перетворенню в лінійному тракті (ЛТ) 1 передавача, дає виходу ЛТ сигнал uc (t ) Uc cos 2f0 Fд t c , де Uc , f0 Fд і c - відповідно, амплітуда сигналу, його частота і фазовий зсув сигналу відбитого від цілі, який має випадкове значення. ' ' ' Кожен з сигналів uc ( t ) і uг ( t ) діляться на дві рівні частини uc1(t ) , uc 2 ( t ) і uг1( t ) , uг 2 ( t ) . Перші ' 45 частини сигналів uc1(t ) і uг1( t ) надходять на перші входи, відповідно, першого 11 і другого 13 перемножувачів після проходження, відповідно, першої ліній затримки 7 і другої лінії затримки 8, які здійснюють часову затримку на сталу часу 0 . Отримуємо ' ' uг (t ) Uг0 cos2f0 t 0 0 ; 3 UA 109145 C2 u'c1(t ) Uc cos 2f0 Fд t 0 c . ' Сигнал з виходу лінійного тракту 2 приймача uc 2 ( t ) і коливання uг 2 ( t ) надходять на перші входи, відповідно, змішувачів 6 і 4. На другі входи змішувачів 6 і 4 подається коливання ukг ( t ) від кварцового генератора 5, яке описується виразом 5 ukг (t ) Ukг cos2fkг kг , де Ukг , fkг і kг - відповідно, амплітуда, частота і начальна фаза коливання. ' В результаті перетворення сигналів uc 2 ( t ) і uг 2 ( t ) за допомогою кварцового генератора на виходах змішувачів 6 і 4 отримуємо комбінаційні складові, які за допомогою смугових фільтрів 10 і 9 виділяють коливання з різницевою частотою, тобто отримуємо такі напруги 10 u1(t ) U1 cos2f0 fkг t 0 kг ; u2 (t ) Uc cos 2f0 fkг Fд t с kг . ' uг ( t ) 15 ' Отримані коливання , u1( t ) і uс1( t ) , u2 ( t ) перемножуються в перемножувачах 11 і 13. З результату перемноження виділяються складові з різницевої частотою. В результаті з виходу перемножувала 11 отримуємо опорне коливання, а з виходу перемножувала 13 - сигнальну напругу. Опорне коливання має вигляд ' ' u1(t ) U1 cos2fkг t 2f0 0 kг . Сигнальна напруга u'2 (t ) U'с cos 2fkг t 2f0 0 2Fд0 kг . При використанні як вимірювач фази 12 фазового детектора, опорне коливання піддається 20 зсуву по фазі на u0 (t ) 2 , в результаті отримуємо опорну напругу в вигляді ' U1 sin 2fkг t 2f0 0 kг . u (t) u' ( t ) З результату перемноження 0 і 2 фазовим детектором, фільтром низьких частот, який повинно включати на виході детектора, виділяється постійна складова uF (t ) Uc sin 2Fд0 25 , рівень якої в інтервалі значень фази 2Fд 0 2 однозначно визначає доплерівський зсув c Vr Fд 2f 0 частоти, а звідси, відповідно, і радіальну швидкість цілі 30 35 . Джерела інформації: 1. Радіотехніка: Енциклопедичний навчальний довідник / [Бєлінський В.Т., Васюк Г.І., Вунтесмері B.C. и інш.]; за ред. Ю.Л. Мазора, Є.А. Мачуського, В.І. Правди. - К.: Вища школа, 1999. - 838 с. 2. Финкельштейн М.И. Основы радиолокации / Моисей Ионович Финкельштейн. - [2-е пере раб. и доп.] - М: Советское радио, 1973. - 536 с. 3. Патент 70379 Україна, G01S 13/34, G01S 13/40. J-кореляційний спосіб вимірювання далекості і пристрій, який його реалізує / Сорочан А.Г., Лігінов С.М., Литвиненко В.І. - № 2002010718; заявл. 29.01.2002; опубл. 15.10.2004, - Бюл. № 10. ФОРМУЛА ВИНАХОДУ 40 1. Спосіб фазового вимірювання радіальної швидкості, згідно з яким немодульоване ' ' високочастотне коливання uг ( t ) з частотою f0 ділиться на дві частини uг ( t ) і uг' ( t ) , перша ' ' ' ' частина коливань uг ( t ) також ділиться на дві частини uг1( t ) і uг 2 ( t ) , коливання uг1( t ) за допомогою високостабільного коливання ukг ( t ) з частотою fkг перетворюється вниз по частоті, отримуємо напругу u1( t ) з частотою 45 f0 fkг , ' друга частина uг' ( t ) коливання uг ( t ) після ' перетворення і посилення випромінюється в простір, коливання uг' ( t ) , відбившись від рухомої цілі, набуває доплерівський зсув по частоті, відбите коливання приймається, перетворюється, 4 UA 109145 C2 підсилюється, в результаті отримуємо сигнал uc ( t ) з частотою f0 Fд , який відрізняється тим, ' що коливання uг 2 ( t ) з частотою f0 затримується на постійну часу 0 , після чого перемножується ' з напругою u1( t ) з частотою f0 fkг , з результату перемноження виділяється складова u1( t ) з різницевою частотою, яка дорівнює fkг , сигнал uc ( t ) з частотою f0 Fд ділиться на дві рівні 5 частини uc1( t ) , uc 2 ( t ) , сигнал uc1( t ) за допомогою високостабільного коливання ukг ( t ) з частотою fkг перетворюється вниз по частоті, отримуємо сигнал u'c1( t ) з частотою f0 Fд fkг , друга частина uc 2 ( t ) сигналу uc ( t ) з частотою f0 Fд затримується на постійну часу 0 , після чого перемножується з напругою u'c1( t ) з частотою f0 Fд fkг , з результату перемноження ' виділяється складова u'2 ( t ) з різницевою частотою, яка дорівнює fkг , отримані коливання u1( t ) і 10 сигнал u'2 ( t ) порівнюються по фазі, з результату порівняння визначається фазовий зсув 2Fд0 , який пропорційний радіальній швидкості руху цілі 15 20 25 Vr c Fд . 2f0 2. Пристрій фазового вимірювання радіальної швидкості, який містить передавач, до складу якого входять генератор високої частоти, лінійний тракт, вихід якого є першим виходом передавача, другим виходом передавача є вихід генератора високої частоти, який також з'єднаний з входом лінійного тракту передавача, приймач, до складу якого входять лінійний тракт, перший змішувач, кварцовий генератор, друга лінія затримки, перший і другий смугові фільтри, перший і другий перемножувачі, вхід лінійного тракту є входом приймача, другий вихід передавача з'єднаний з першим входом першого змішувача, другий вхід якого з'єднан ий з кварцовим генератором, вихід змішувача з'єднаний через перший смуговий фільтр з першим входом першого перемножувача, вихід другого смугового фільтра з'єднаний з першим входом другого перемножувача, другий вхід якого з'єднаний з другою лінією затримки, який відрізняється тим, що в нього введені перша лінія затримки, через яку перший вхід першого змішувача з'єднаний з другим входом першого перемножувача, другий змішувач, перший вхід якого з'єднаний з виходом лінійного тракту, другий вхід другого змішувача з'єднаний з кварцовим генератором, а вихід другого змішувача з'єднаний з другим смуговим фільтром, вхід другого змішувача через другу лінію затримки з'єднаний з другим входом другого перемножувача, вимірювач фази, перший і другий входи якого з'єднані відповідно з виходами першого і другого перемножувачів, вихід вимірювача фази є виходом пристрою. Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюSorochan Anatolii Hryhorovych, Kharchenko Volodymyr Petrovych
Автори російськоюСорочан Анатолий Григорьевич, Харченко Владимир Петрович
МПК / Мітки
МПК: G01S 13/92
Мітки: вимірювання, радіальної, пристрій, спосіб, здійснення, фазового, швидкості
Код посилання
<a href="https://ua.patents.su/7-109145-sposib-fazovogo-vimiryuvannya-radialno-shvidkosti-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб фазового вимірювання радіальної швидкості та пристрій для його здійснення</a>
Спосіб вимірювання різниці часу затримки вузькосмугового радіосигналу з обмеженим інтервалом кореляції та пристрій для його здійснення
Номер патенту: 66378
Опубліковано: 17.05.2004
Автори: Клепфер Євген Іванович, Григор'єва Людмила Володимирівна, Антонюк Володимир Павлович
МПК: G01S 5/00, G01S 13/06, G01S 13/42
Мітки: вимірювання, спосіб, інтервалом, різниці, пристрій, затримки, часу, здійснення, радіосигналу, кореляції, обмеженим, вузькосмугового
Формула / Реферат:
1. Спосіб вимірювання різниці часу затримки вузькосмугового радіосигналу з обмеженим інтервалом кореляції, оснований на визначенні попереднього наближення різниці затримки сигналу по максимуму огинаючої взаємної кореляційної функції з подальшим уточненням результату по даних вимірювання фази в точці попереднього наближення, який відрізняється тим, що в умовах апріорної невизначеності несучої частоти сигналу, одночасно з вимірюванням фази...
Спосіб вимірювання тимчасової затримки модульованого сигналу при його проходженні окремими каналами розповсюдження та пристрій для його здійснення
Номер патенту: 42816
Опубліковано: 15.11.2001
Автори: Лігінов Сергій Михайлович, Литвиненко Валентин Іванович, Сорочан Анатолій Григорович
МПК: G01S 3/00
Мітки: затримки, здійснення, пристрій, вимірювання, каналами, проходженні, модульованого, тимчасово, сигналу, окремими, розповсюдження, спосіб
Формула / Реферат:
1.Спосіб вимірювання тимчасової затримки модульованого сигналу при його - проходженні окремими каналами розповсюдження, містить регульовану калібровану затримку сигналу першого каналу, який відносять по частоті на частоту гетеродина wr і затрмують на сталу величину
Спосіб вимірювання швидкості потоків і пристрій для його здійснення
Номер патенту: 98352
Опубліковано: 10.05.2012
Автор: Землянський Володимир Михайлович
МПК: G01P 3/36
Мітки: потоків, здійснення, спосіб, швидкості, вимірювання, пристрій
Формула / Реферат:
1. Спосіб вимірювання швидкості потоків шляхом зондування рухомого потоку двома лазерними пучками різної частоти, які сформовані від лазерного джерела випромінювання, прийому розсіяних пучків в двох різних напрямках з наступним їх оптичним змішуванням на фотокатоді квадратичного детектора і виділення на його виході високочастотного сигналу, пропорційного проекції швидкості потоку, який відрізняється тим, що зондування потоку здійснюють двома...
Спосіб вимірювання кутової швидкості, пристрій для його здійснення та блок обробки диференційних сигналів для пристрою
Номер патенту: 61160
Опубліковано: 17.11.2003
Автори: Гуменюк Володимир Григорович, Васильєв Володимир Леонідович, Олексієнко Микола Петрович, Гаврилюк Володимир Леонідович, Шервашидзе Володимир Варлаамович, Леоненко Сергій Миколайович, Шкляр Володимир Петрович
Мітки: блок, швидкості, вимірювання, пристрою, спосіб, здійснення, сигналів, пристрій, диференційних, обробки, кутової
Формула / Реферат:
1. Спосіб вимірювання кутової швидкості, за яким визначають переміщення чутливого елемента з гіромотором, який розміщують на об'єкті, кутову швидкість якого виміряють, величину переміщення перетворюють в електричний сигнал, на основі якого формують компенсаційу силу, пропорційну кутовій швидкості вказаного об'єкта, і під впливом якої чутливий елемент повертається у зрівноважене положення, по величині якої визначають величину кутової...
Радіоакустичний спосіб вимірювання швидкості та зсуву вітру в атмосферному прикордонному шарі і пристрій для його здійснення
Номер патенту: 87082
Опубліковано: 10.06.2009
Автори: Коритцев Ігор Васильович, Сідоров Геннадій Іванович, Величко Дмитро Анатолійович, Зубков Олег Вікторович
МПК: G01S 13/95
Мітки: шарі, швидкості, пристрій, зсуву, прикордонному, атмосферному, здійснення, радіоакустичний, спосіб, вітру, вимірювання
Формула / Реферат:
1. Радіоакустичний спосіб вимірювання швидкості та зсуву вітру в прикордонному шарі атмосфери, який включає випромінювання вертикально вгору акустичного імпульсу з синусоїдальним заповненням, співвісне опромінювання його неперервним радіосигналом з довжиною хвилі, вдвічі більшою довжини акустичної хвилі, причому ширина діаграми спрямованості радіопередавальної антени не менше подвійної величини вітрового зносу акустичного пакета від осі...
Попередній патент: Дезінфікуючий і антисептичний препарат з пониженим вмістом йоду
Випадковий патент: Рекурентний цифровий фільтр