Спосіб вимірювання швидкості потоків і пристрій для його здійснення

Формула / Реферат
1. Спосіб вимірювання швидкості потоків шляхом зондування рухомого потоку двома лазерними пучками різної частоти, які сформовані від лазерного джерела випромінювання, прийому розсіяних пучків в двох різних напрямках з наступним їх оптичним змішуванням на фотокатоді квадратичного детектора і виділення на його виході високочастотного сигналу, пропорційного проекції швидкості потоку, який відрізняється тим, що зондування потоку здійснюють двома некогерентними лазерними пучками, узгодженими по поляризації, для яких модуль степеня часової когерентності в зоні вимірювання дорівнює нулю, а перед оптичним змішуванням розсіяних пучків виконують часову затримку розсіяних пучків для одного з двох напрямків прийому і компенсують різницю оптичного ходу між зондуючими пучками.
2. Пристрій вимірювання швидкості потоків, який складається з оптично узгодженого лазера, блока формування двох лазерних пучків, який включає частотно-зсувний пристрій з високочастотним генератором і дзеркало, датчик, який включає фокусуючий об'єктив і діафрагму з чотирма отворами, приймальний блок, який включає діафрагму з двома отворами, а також складається з вимірювача доплерівської частоти, який відрізняється тим, що додатково введені в блок формування - світлоподільник, який формує два пучки рівної інтенсивності, узгоджених по поляризації, вхід якого оптично узгоджений з виходом лазера, в приймальний блок - складовий змішувач, на виході якого встановлена діафрагма з двома отворами, а також введений оптичний пристрій утворення тимчасових затримок одного з зондуючих і одного з розсіяних пучків.
3. Пристрій за п. 2, який відрізняється тим, що оптичний пристрій утворення часових затримок складається з двох ліній затримок і дзеркала, при цьому одна лінія затримки установлена на шляху одного з зондуючих пучків на виході дзеркала блока формування, а друга лінія затримки установлена на шляху одного з розсіяних пучків на виході дзеркала цього самого пристрою.
4. Пристрій за п. 2, який відрізняється тим, що оптичний пристрій утворення часових затримок складається з чотирьох одномодових світловодів, два з яких установлені на шляху двох зондуючих пучків і два - на шляху розсіяних пучків, причому один світловод на шляху зондуючого пучка утворює часову затримку ![]() цього пучка по відношенню до другого зондуючого пучка і, крім того, один з світловодів на шляху одного з розсіянних пучків утворює часову затримку
цього пучка по відношенню до другого зондуючого пучка і, крім того, один з світловодів на шляху одного з розсіянних пучків утворює часову затримку ![]() цього пучка по відношенню до другого розсіяного пучка, де
цього пучка по відношенню до другого розсіяного пучка, де ![]() - час когерентності,
- час когерентності, ![]() - часова затримка.
- часова затримка.
5. Пристрій за п. 3, який відрізняється тим, що друга лінія затримки встановлена на шляху другого розсіяного пучка.
Текст
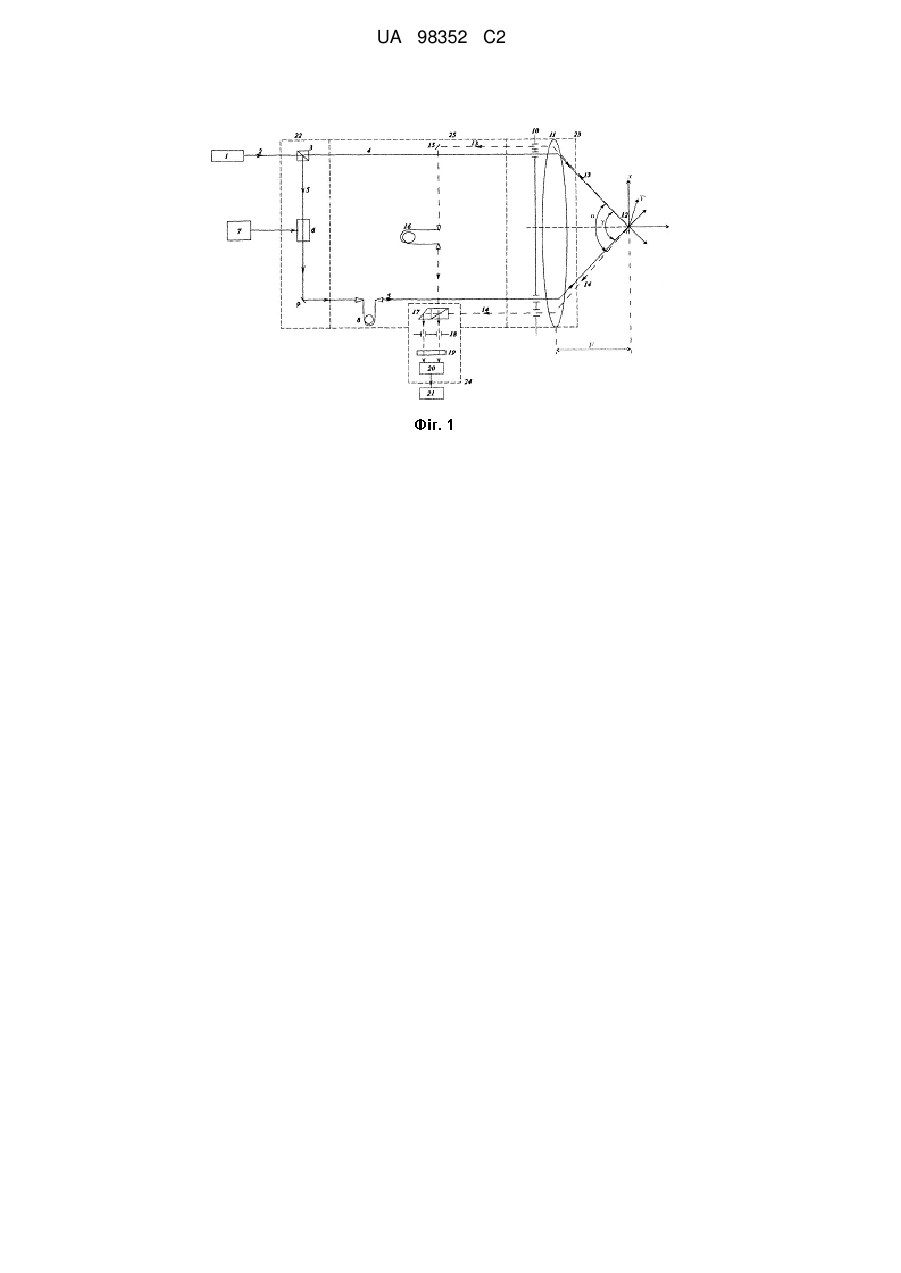
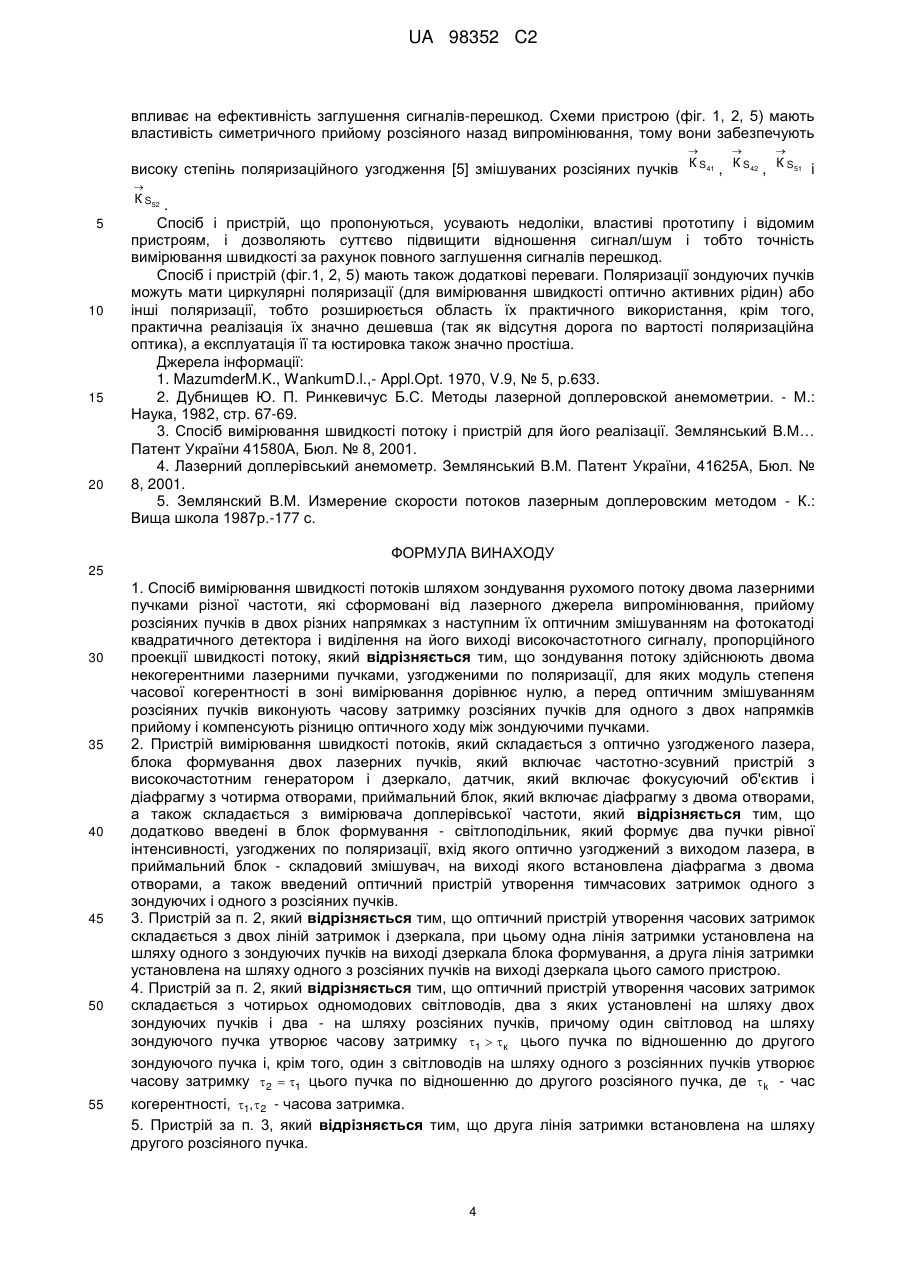
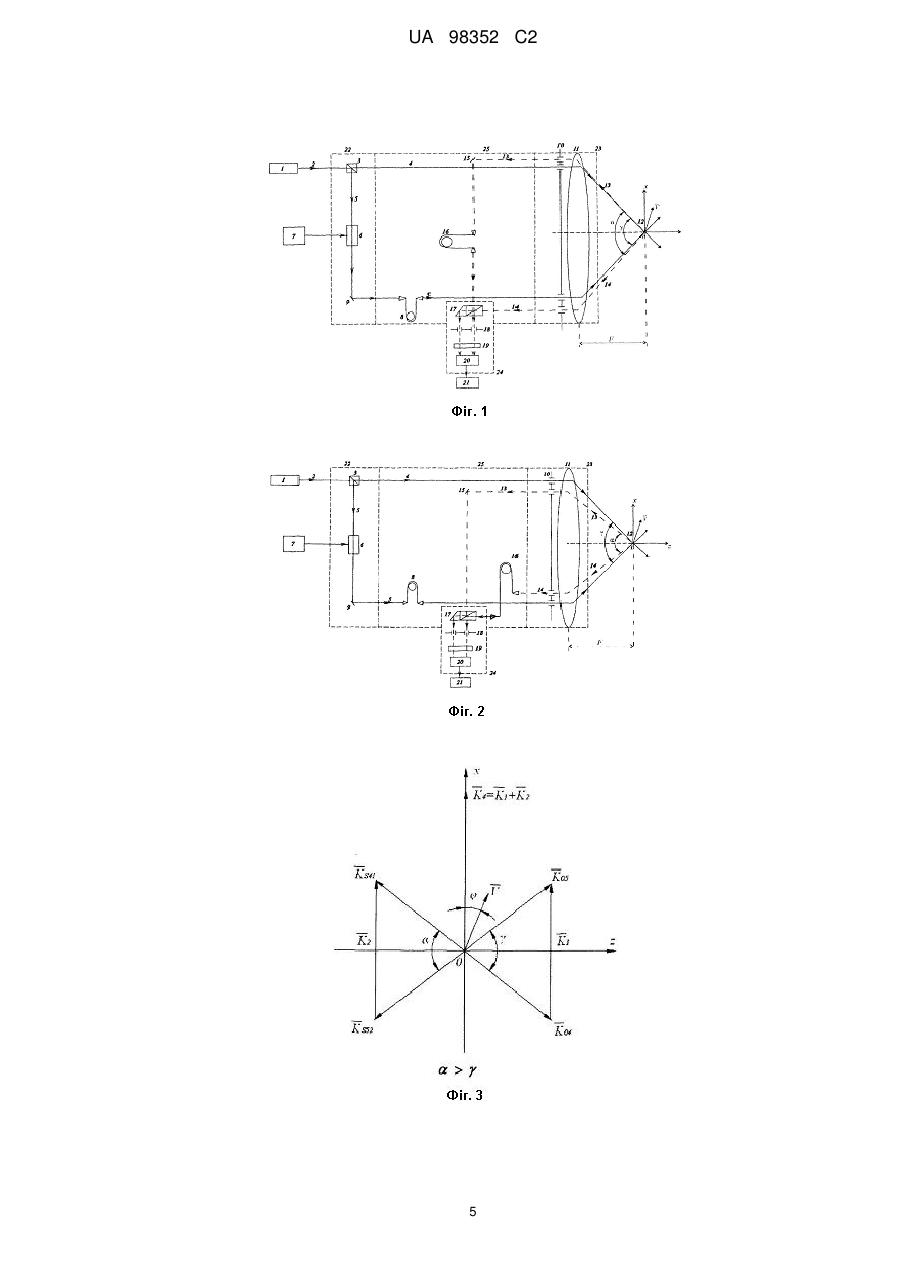
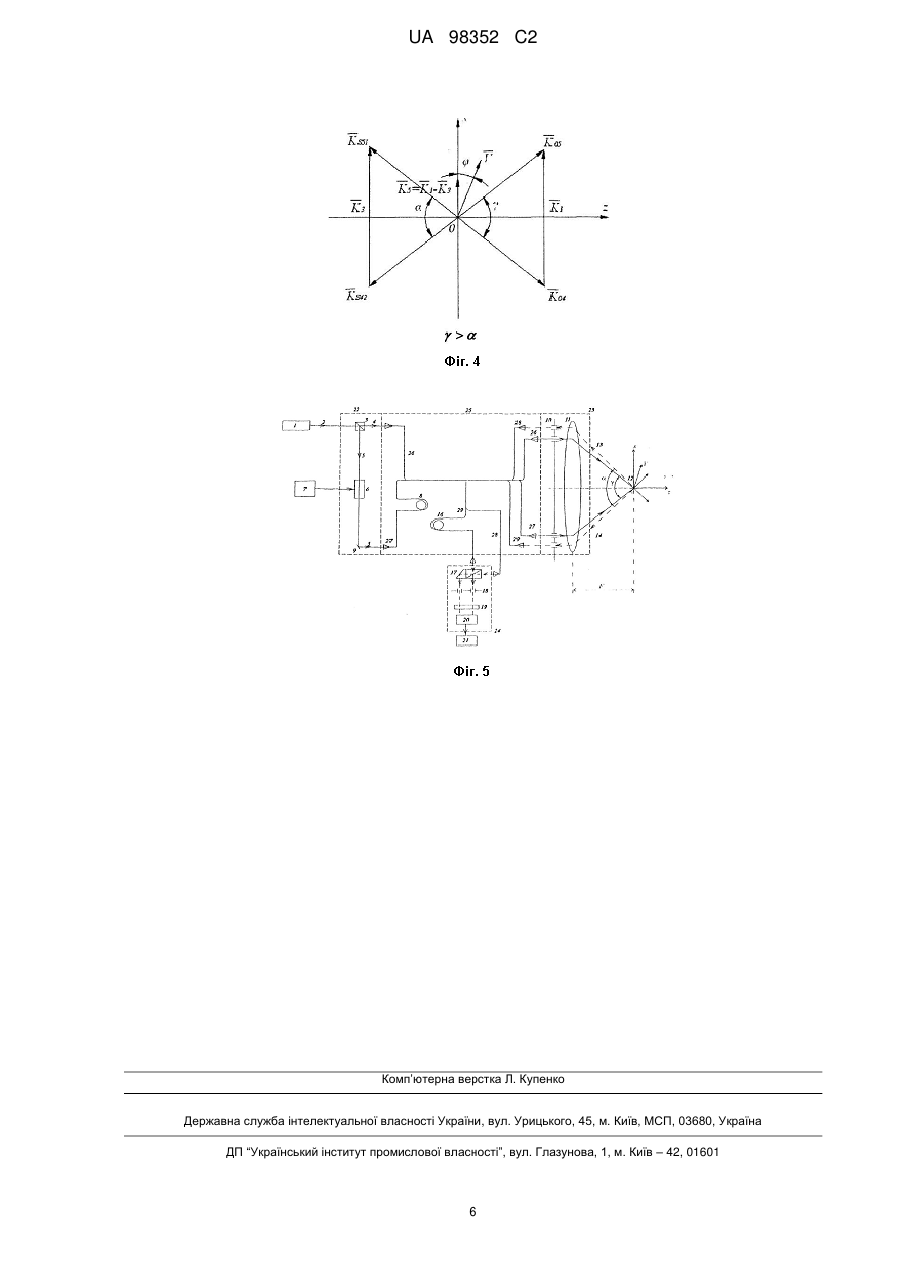
Реферат: Спосіб вимірювання швидкості потоків і пристрій для його здійснення належать до вимірювальної техніки і можуть бути застосований для вимірювання як великих швидкостей газових потоків, так і малих швидкостей рідких середовищ. Спосіб вимірювання ґрунтується на зондуванні потоку двома некогерентними лазерними пучками різної частоти, узгодженими по поляризації, і прийомі розсіяного назад випромінювання в двох різних напрямках зі здійсненням часової затримки розсіяних пучків для одного з двох напрямків прийому і оптичним змішуванням розсіяних пучків на фотокатоді квадратичного детектора. Пристрій складається з лазера, блока формування пучків, який включає світлоподільник, частотно-зсувний пристрій з генератором і дзеркало, датчик, який включає фокусуючий об'єктив, діафрагму з чотирма отворами, приймального блока, який включає складовий змішувач, діафрагму, інтерференційний світлофільтр, фотоприймач, а також складається з блока часових затримок, який містить, наприклад, дві лінії затримки і дзеркало. Спосіб і пристрій забезпечують заглушення високочастотних перешкод - сигналів при прийомі розсіяного назад випромінювання і підвищення відношення сигнал/шум. UA 98352 C2 (12) UA 98352 C2 UA 98352 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до вимірювальної техніки і може бути застосований для вимірювання швидкості потоків газу або рідини. Відомий спосіб вимірювання швидкості потоків [1] ґрунтується на зондуванні лазерним пучком потоку з наступним оптичним змішуванням на фотокатоді квадратичного детектора двох розсіяних пучків, а також пристрій [2], який включає лазер, фокусуючий об'єктив, діафрагму з двома отворами, частотно-зсувний пристрій, який підключений до високочастотного генератора, дзеркало, змішувач, фотоприймач і вимірювач доплерівської частоти. Проте, відомі спосіб і пристрій мають невисоку чутливість, змінювати яку можливо лише за допомогою змінювання кута α між розсіяними пучками. Найбільш близьким технічним рішенням є спосіб вимірювання швидкості потоків [3], який ґрунтується на зондуванні потока двома когерентними лазерними пучками різної частоти і прийому розсіяного випромінювання в двох різних напрямках з наступним їх оптичним змішуванням на фотокатоді квадратичного детектора і виділенні на його виході високочастотного сигналу, пропорційного проекції швидкості. Відомий пристрій - лазерний доплерівський анемометр (ЛДА), який реалізує цей спосіб при прийомі розсіяного назад випромінювання [4], який складається з оптично узгоджених лазера, блока формування двох лазерних пучків, який включає частотно-зсувний пристрій з високочастотним генератором і дзеркало; датчика, який включає фокусуючий об'єктив і діафрагму з чотирма отворами; приймального блока, який включає діафрагму з двома отворами, інтерференційний світлофільтр, фотоприймач, а також вимірювач доплерівської частоти. Відомий спосіб і пристрій мають наступні недоліки. Спосіб ґрунтується на зондуванні і прийомі двох пучків, які мають взаємно-ортогональні лінійні поляризації. При прийомі розсіяного назад випромінювання відбувається суттєве змінення стану поляризації (за винятком площини зондуючих пучків) і в загальному випадку розсіяні пучки, які приймаються назад, не є взаємноортогональними за станом поляризації [5]. Тому в цьому випадку суттєво знижується ефективність перетворення поляризаційної модуляції випромінювання в модуляцію інтенсивності і, крім того, на виході фотоприймача крім корисного сигналу на частоті 1(2 ) з'являються також високочастотні сигнали-перешкоди. Частотні спектри корисного сигналу і п'яти перешкод перекриваються і тому виділення сигналу з поміж перешкод на виході фотоприймача є не вирішеною технічною проблемою. В основу винаходу поставлено задачу підвищення відношення сигнал/шум при прийомі розсіяного назад випромінювання за рахунок заглушення високочастотних сигналів-перешкод на виході фотоприймача. Це досягається тим, що потік зондують двома некогерентними лазерними пучками, узгодженими по поляризації, для яких модуль степеня часової когерентності в зоні вимірювання дорівнює нулю, а перед оптичним змішуванням розсіяних пучків здійснюють часову затримку розсіяних пучків для одного з двох напрямків прийому. В цьому випадку на виході фотоприймача внаслідок оптичного змішування чотирьох розсіяних пучків різної частоти формується тільки один високочастотний корисний сигнал, а інші високочастотні сигнали-перешкоди заглушуються. Поставлена задача в способі вимірювання швидкості потоків розв'язується шляхом зондування рухомого потоку двома лазерними пучками різної частоти і прийомі розсіяних пучків в двох різних напрямках з наступним їх оптичним змішуванням на фотокатоді квадратичного детектора і виділенні на його виході високочастотного сигналу, пропорційного проекції вектора швидкості. Додатково, згідно з винаходом, зондування потоку здійснюють двома некогерентними лазерними пучками узгодженими по поляризації, для яких, модуль степеня часової когерентності в зоні вимірювання дорівнює нулю, а перед оптичним змішуванням розсіяних пучків здійснюють часову затримку розсіяних пучків для одного з двох напрямків прийому і компенсують різницю оптичного ходу між зондуючими пучками. Для пристрою поставлена задача вирішується тим, що в пристрої [4], який складається з оптично узгоджених лазера, блока формування двох лазерних пучків, який включає частотнозсувний пристрій з генератором і дзеркалом; датчика, який включає фокусуючий об'єктив і діафрагму з чотирма отворами; приймального блока, який включає діафрагму з двома отворами, інтерференційний світлофільтр і фотоприймач, а також вимірювач доплерівської частоти, згідно з винаходом, додатково впроваджені в блок формування світлоподільник, вхід якого оптично узгоджений з виходом лазера; в приймальний блок - складовий змішувач, на виході якого установлена діафрагма з двома отворами, а також введений оптичний пристрій створення часових затримок одного з зондуючих і одного з розсіяних пучків. Крім того, в пристрої оптичний пристрій утворення часових затримок складається з двох ліній затримок і дзеркала, одна лінія затримки установлена на шляху одного з зондуючих пучків 1 UA 98352 C2 5 па виході дзеркала блока формування, а друга лінія затримки установлена на шляху одного з розсіяних пучків на виході дзеркала цього самого пристрою. Пристрій відрізняється тим, що друга лінія затримки встановлена на шляху другого розсіяного пучка. Пристрій також відрізняється тим, що оптичний пристрій утворення часових затримок складається з чотирьох одномодових світловодів, два з яких установлені на шляху двох зондуючих пучків і два на шляху розсіяних пучків, причому один світловод на шляху зондуючого пучка утворює часову затримку 1 к цього пучка по відношенню до другого зондуючого пучка і, крім того, один з світловодів на шляху одного з розсіяних пучків утворює часову затримку 2 1 цього пучка по відношенню до другого розсіяного пучка (де k - час 10 15 20 25 30 35 когерентності; 1, 2 - часова затримка). На фіг. 1 зображена блок-схема пристрою, яка реалізує запропонований спосіб вимірювання швидкості для малих швидкостей; на фіг. 2 - блок-схема пристрою для вимірювання високошвидкісних потоків; на фіг. 3 і 4 - геометрія зондуючих і розсіяних пучків відповідно для схем пристрою фіг. 1 і 2; на фіг. 5 - блок-схема пристрою в волоконно-оптичному виконанні. Пристрій (фіг. 1, 2 і 5) містить: лазер 1, випромінюючий поляризований пучок 2, світлоподільник 3, на виході якого формуються два пучки 4 і 5 рівної інтенсивності; частотнозсувний пристрій 6, підключений до високочастотного генератора 7, лінію затримки 8; дзеркало 9, діафрагму 10 з чотирма отворами; фокусуючий об'єктив 11, зону вимірювання 12; розсіяні пучки 13 і 14, дзеркало 15, лінію затримки 16, складовий змішувач 17, діафрагму з двома отворами 18, інтерференційний фільтр 19, фотоприймач 20; вимірювач доплерівської частоти 21; блок формування 22, в який входять оптичні елементи і блоки 3, 6 і 9; датчик 23, в який відповідно входять блоки 10 і 11; приймальний блок 24, в який відповідно входять блоки 17, 18, 19 і 20; оптичний прилад часових затримок 25, в який входять для схем ЛДА на фіг. 1 і 2 блоки 8, 15 і 16; а для схем фіг. 5 - одномодові світловоди з пристроями вводу і виводу колімованого пучка на кінцях кожного світловоду 26, 27, 28 і 19. Пристрій (фіг. 1) працює наступним чином. Потужний лазер 1, який працює в безперервному режимі, випромінює поляризований пучок 2 (наприклад, вертикально поляризований), який ділиться світлоподільником 3 на два пучка 4 і 5. Пучок 5 після проходження частотно-зсувного пристрою 6, підключеного до високочастотного генератора 7, зміщується по частоті на фіксовану величину м , потім відбившись від дзеркала 9 проходить оптичну лінію затримки 8, яка утворює часову затримку 1 к (де к - час когерентності лазерного випромінювання 2. Паралельні і симетричні відносно оптичної осі ОZ пучки 4 і 5, які мають узгоджені поляризації, проходять два отвори діафрагми 10 і фокусуються об'єктивом 11 в зону вимірювання 12. В зоні вимірювання 12 лазерні зондуючі пучки 4 і 5 перетинаються під кутом . При проходженні крізь зону вимірювання 12 рухомих з потоком мікрочастинок розсіяне назад випромінювання збирається об'єктивом 11 в напрямках 13 і 14, які визначаються двома малими круглими отворами діафрагми 10, і перетворюються в паралельні розсіяні пучки 13 і 14. Розсіяний пучок 13, який є суперпозицією двох розсіяних пучків К S 4 1 і К S 5 1 відповідно від зондуючих пучків К 04 і К 05 ( К 0i , К S ij - хвильові вектори відповідно зондуючого і розсіяного пучків), після відбиття від 40 дзеркала 15 проходить лінію затримки 16, яка створює для пучків К S 4 1 і К S 5 1 часову затримку 1 , і далі прямує на вхід складового змішувача 17. Розсіяний пучок 14, який є суперпозицією 45 двох розсіяних пучків К S 4 2 і К S5 2 , прямує на другий вхід складового змішувача 17. Складовий змішувач 17 складається з напівпрозорої призми і призми повного внутрішнього відображення, тому на виході цієї призми формуються два розсіяні пучки, кожний з яких є суперпозицією розсіяних пучків 13 і 14. Просторово поєднані розсіяні пучки 13 і 14 далі проходять діафрагму з двома круглими отворами 18, інтерференційний світлофільтр 19 і прямують на фотокатод фотоприймача 20. Внаслідок оптичного змішування чотирьох розсіяних пучків: К S 4 1 , К S 4 2 , К S 5 1 i К S5 2 на виході фотоприймача створюється тільки один високочастотний сигнал на різницевій частоті (див. фіг. 3) 1 S 52 S 41 M K 05 K 04 V K S 41 K S 52 2 V M K 1 K 2 V M K 4 V , де UA 98352 C2 сумарний вектор K 4 (фіг. 3) паралельний осі ОХ. Тому частота сигналу на виході фотоприймача дорівнює 1 M 8 sin cos VX , 4 4 де - довжина хвилі випромінювання, Vx V cos , - кут між вектором швидкості та віссю 5 ОХ в площині 0 × 2, і пропорційна проекції швидкості Vx . Частота сигналу 1 вимірюється вимірювачем доплерівської частоти 21, який видає інформацію про модуль і знак Vx . Високочастотні 4 S52 S41 ; сигнали 5 S52 S42 на ; різницевих 6 S51 S41 2 S51 S42 частотах: 3 S51 S42 ; ; на виході фотоприймача заглушуються, тому що для цих сигналів модуль степеня когерентності дорівнює 0, і тільки для сигналу 1 модуль 10 степеня часової когерентності дорівнює 1 1 . Схема пристрою (фіг. 1) має високу чутливість: Гц 4 SX sin cos м/ с 4 4 , якщо , тому й доцільно її використовувати при вимірюванні малих швидкостей, коли 15 потрібна як висока чутливість так і просторовий розподіл. Блок формування 22 оптично узгоджений з виходом лазера 1, а приймальний блок 24 - з виходом датчика 23. Якщо необхідно виміряти дуже високі швидкості потоків, наприклад, гіперзвукові, то використовується схема пристрою, яка зображена на фіг.2. Ця схема відрізняється від пристрою на фіг. 1 тим, що в ній лінія затримки 16 установлюється на шляху розсіяного пучка 14 і за її допомогою утворюється часова затримка для пучків К S42 і К S52 на величину 1 2 . В цьому К S41 20 К S42 випадку внаслідок оптичного змішування чотирьох розсіяних пучків: , виході фотоприймача формується високочастотний сигнал на частоті (фіг. 4): 2 S51 S42 M K 05 K 04 V K S42 K S51 V M K1 K 3 V M K 5 V , К S51 i К S52 на , 8 2 M sin cos VX , 4 4 1 2 оскільки для цього сигналу модуль степеня часової когерентності . Інші п'ять високочастотних сигналів-перешкод автоматично заглушуються, тобто для цих сигналів модуль 25 0 3 4 5 6 степеня часової когерентності 1 . Схема пристрою (фіг. 2) має при відносно великому куті і куті α близькому по величині до малу чутливість Гц 4 SX cos sin м/ с 4 4 , 30 тому її доцільно використовувати при вимірюванні великих швидкостей. Під час вимірювання швидкостей в важкодоступних зонах використовується варіант побудови пристрою (фіг. 5) з використанням волоконно-оптичного пристрою часових затримок 25, який складається з чотирьох світловодів 26, 27, 28 і 29. Причому за допомогою світловоду 27, який включає лінію затримки 8, створюється часова затримка зондуючого пучка на величину 1 35 40 , а за допомогою світловоду 29 з лінією затримки 16 - часова затримка 1 для розсіяних пучків. На фіг. 5 зображена схема пристрою, яка працює в режимі з максимальною чутливістю (фіг. 3). Для переходу схеми в режим з мінімальною чутливістю (фіг. 4) необхідно на вході датчика 23 поміняти місцями кінці світловодів 28 і 29. Схема пристрою, яка зображена на фіг. 5, працює аналогічно схемам на фіг. 1 і 2. В загальному випадку для схем пристрою (фіг. 1,2,5) бісектриса кута між зондуючими пучками 4 і 5 може складати деякий кут з бісектрисою кута між розсіяними пучками 13 і 14 в площині OYZ. При довільній просторовій орієнтації бісектриси кута по відношенню до бісектриси кута схеми пристрою (фіг. 1, 2, 5) зберігає працездатність і забезпечує перешкодостійке виділення відповідного корисного сигналу при автоматичному заглушенні інших п'яти сигналів-перешкод. Зміна стану поляризації розсіяного назад випромінювання не 3 UA 98352 C2 впливає на ефективність заглушення сигналів-перешкод. Схеми пристрою (фіг. 1, 2, 5) мають властивість симетричного прийому розсіяного назад випромінювання, тому вони забезпечують високу степінь поляризаційного узгодження [5] змішуваних розсіяних пучків К S41 , К S42 , К S51 i К S52 5 10 15 20 . Спосіб і пристрій, що пропонуються, усувають недоліки, властиві прототипу і відомим пристроям, і дозволяють суттєво підвищити відношення сигнал/шум і тобто точність вимірювання швидкості за рахунок повного заглушення сигналів перешкод. Спосіб і пристрій (фіг.1, 2, 5) мають також додаткові переваги. Поляризації зондуючих пучків можуть мати циркулярні поляризації (для вимірювання швидкості оптично активних рідин) або інші поляризації, тобто розширюється область їх практичного використання, крім того, практична реалізація їх значно дешевша (так як відсутня дорога по вартості поляризаційна оптика), а експлуатація її та юстировка також значно простіша. Джерела інформації: 1. MazumderM.K., WankumD.l.,- Appl.Opt. 1970, V.9, № 5, p.633. 2. Дубнищев Ю. П. Ринкевичус Б.С. Методы лазерной доплеровской анемометрии. - М.: Наука, 1982, стр. 67-69. 3. Спосіб вимірювання швидкості потоку і пристрій для його реалізації. Землянський В.М… Патент України 41580А, Бюл. № 8, 2001. 4. Лазерний доплерівський анемометр. Землянський В.М. Патент України, 41625А, Бюл. № 8, 2001. 5. Землянский В.М. Измерение скорости потоков лазерным доплеровским методом - К.: Вища школа 1987р.-177 с. ФОРМУЛА ВИНАХОДУ 25 30 35 40 45 50 55 1. Спосіб вимірювання швидкості потоків шляхом зондування рухомого потоку двома лазерними пучками різної частоти, які сформовані від лазерного джерела випромінювання, прийому розсіяних пучків в двох різних напрямках з наступним їх оптичним змішуванням на фотокатоді квадратичного детектора і виділення на його виході високочастотного сигналу, пропорційного проекції швидкості потоку, який відрізняється тим, що зондування потоку здійснюють двома некогерентними лазерними пучками, узгодженими по поляризації, для яких модуль степеня часової когерентності в зоні вимірювання дорівнює нулю, а перед оптичним змішуванням розсіяних пучків виконують часову затримку розсіяних пучків для одного з двох напрямків прийому і компенсують різницю оптичного ходу між зондуючими пучками. 2. Пристрій вимірювання швидкості потоків, який складається з оптично узгодженого лазера, блока формування двох лазерних пучків, який включає частотно-зсувний пристрій з високочастотним генератором і дзеркало, датчик, який включає фокусуючий об'єктив і діафрагму з чотирма отворами, приймальний блок, який включає діафрагму з двома отворами, а також складається з вимірювача доплерівської частоти, який відрізняється тим, що додатково введені в блок формування - світлоподільник, який формує два пучки рівної інтенсивності, узгоджених по поляризації, вхід якого оптично узгоджений з виходом лазера, в приймальний блок - складовий змішувач, на виході якого встановлена діафрагма з двома отворами, а також введений оптичний пристрій утворення тимчасових затримок одного з зондуючих і одного з розсіяних пучків. 3. Пристрій за п. 2, який відрізняється тим, що оптичний пристрій утворення часових затримок складається з двох ліній затримок і дзеркала, при цьому одна лінія затримки установлена на шляху одного з зондуючих пучків на виході дзеркала блока формування, а друга лінія затримки установлена на шляху одного з розсіяних пучків на виході дзеркала цього самого пристрою. 4. Пристрій за п. 2, який відрізняється тим, що оптичний пристрій утворення часових затримок складається з чотирьох одномодових світловодів, два з яких установлені на шляху двох зондуючих пучків і два - на шляху розсіяних пучків, причому один світловод на шляху зондуючого пучка утворює часову затримку 1 к цього пучка по відношенню до другого зондуючого пучка і, крім того, один з світловодів на шляху одного зрозсіянних пучків утворює часову затримку 2 1 цього пучка по відношенню до другого розсіяного пучка, де k - час когерентності, 1,2 - часова затримка. 5. Пристрій за п. 3, який відрізняється тим, що друга лінія затримки встановлена на шляху другого розсіяного пучка. 4 UA 98352 C2 5 UA 98352 C2 Комп’ютерна верстка Л. Купенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for measurement of flow velocities
Автори англійськоюZemlyanskyi Volodymyr Mykhaylovych
Назва патенту російськоюСпособ измерения скорости потоков и устройство для его осуществления
Автори російськоюЗемлянский Владимир Михайлович
МПК / Мітки
МПК: G01P 3/36
Мітки: спосіб, потоків, швидкості, вимірювання, здійснення, пристрій
Код посилання
<a href="https://ua.patents.su/8-98352-sposib-vimiryuvannya-shvidkosti-potokiv-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання швидкості потоків і пристрій для його здійснення</a>
Спосіб вимірювання швидкості потоку і пристрій для його реалізації
Номер патенту: 41580
Опубліковано: 17.09.2001
Автор: Землянський Володимир Михайлович
Мітки: спосіб, пристрій, вимірювання, потоку, реалізації, швидкості
Формула / Реферат:
1. Спосіб вимірювання швидкості потоку шляхом зондування рухомого потоку лазерним пучком і виділення для двох напрямків прийому розсіяних пучків з наступним їх оптичним змішуванням на фотокатоді квадратичного детектора, який відрізняється тим, що потік зондують двома лазерними пучками з взаємоортогональними поляризаціями і різницею частот ΩМ, в кожному напрямі прийому виділяють два розсіяних пучки, що мають взаємоортогональні...
Спосіб вимірювання кутової швидкості, пристрій для його здійснення та блок обробки диференційних сигналів для пристрою
Номер патенту: 61160
Опубліковано: 17.11.2003
Автори: Шервашидзе Володимир Варлаамович, Васильєв Володимир Леонідович, Олексієнко Микола Петрович, Шкляр Володимир Петрович, Гаврилюк Володимир Леонідович, Гуменюк Володимир Григорович, Леоненко Сергій Миколайович
Мітки: кутової, вимірювання, сигналів, диференційних, спосіб, здійснення, пристрою, блок, пристрій, обробки, швидкості
Формула / Реферат:
1. Спосіб вимірювання кутової швидкості, за яким визначають переміщення чутливого елемента з гіромотором, який розміщують на об'єкті, кутову швидкість якого виміряють, величину переміщення перетворюють в електричний сигнал, на основі якого формують компенсаційу силу, пропорційну кутовій швидкості вказаного об'єкта, і під впливом якої чутливий елемент повертається у зрівноважене положення, по величині якої визначають величину кутової...
Спосіб визначення ударної в’язкості зварного вузла і пристрій з вимірювання швидкості ультразвукових поверхневих хвиль для його здійснення
Номер патенту: 72515
Опубліковано: 15.03.2005
Автори: Рамахефасоло Даніель Себаст'єн, Шательє Жан-Ів
МПК: G01N 29/22, G01N 29/34, G01N 29/00, G01N 29/07
Мітки: визначення, вимірювання, поверхневих, пристрій, зварного, в'язкості, спосіб, здійснення, ударної, вузла, хвиль, швидкості, ультразвукових
Формула / Реферат:
1. Спосіб визначення ударної в'язкості зварного вузла (26) металевого листа (27) на підкладці (28), який відрізняється тим, що генерують поверхневі ультразвукові хвилі на металевому листі (27), вимірюють швидкості поширення цих хвиль і по них визначають параметр () швидкості для визначення ударної в'язкості відповідно до функції кореляції, що зв'язує ударну в'язкість...
Пристрій для вимірювання швидкості конвективних потоків газу
Номер патенту: 28599
Опубліковано: 16.10.2000
Автори: Скриль Іван Никифорович, Кущинський Олег Вячеславович
МПК: G01P 5/00
Мітки: газу, конвективних, швидкості, потоків, вимірювання, пристрій
Формула / Реферат:
Пристрій для вимірювання швидкості конвективних потоків газу, який містить корпус з розташованим у ньому тахогенератором, з'єднаним дротом з вимірювальним пультом, який відрізняється тим, що чутливий елемент, наприклад, у вигляді напівциліндрів, тахогенератора встановлено на вісі з постійним магнітом, а кінні вісі встановлено на двох підшипниках, які розташовані в опорах корпусу, а котушки статору виконані без металевих осередців.
Акустичний спосіб вимірювання швидкості та напряму потоку рідини або газу і пристрій для його здійснення (варіанти)
Номер патенту: 76062
Опубліковано: 15.06.2006
Автори: Гайський Павло Вітальович, Греков Миколай Олександрович, Гайскій Віталій Олександрович
МПК: G01S 15/00, G01P 5/00
Мітки: потоку, рідини, акустичний, здійснення, швидкості, пристрій, вимірювання, напряму, спосіб, варіанти, газу
Формула / Реферат:
1. Акустичний спосіб вимірювання швидкості та напряму потоку рідини або газу з використанням рознесених в просторі акустичних випромінювачів-приймачів, що включає випромінювання і приймання акустичних сигналів, фіксацію часових інтервалів проходження сигналів на акустичних трасах і обчислення швидкості звуку і складових вектора швидкості потоку в заданій системі координат, який відрізняється тим, що акустичні випромінювачі-приймачі по одному...
Попередній патент: Прилітна дошка
Наступний патент: Спосіб контролю зміни опору ізоляції електродвигуна й живильного кабелю
Випадковий патент: Спосіб виміру температури гарячого коксу на конвеєрній стрічці